MM440_käyttöesimerkki 02_käyntiin_eteen_taakse - Siemens
MM440_käyttöesimerkki 02_käyntiin_eteen_taakse - Siemens
MM440_käyttöesimerkki 02_käyntiin_eteen_taakse - Siemens

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
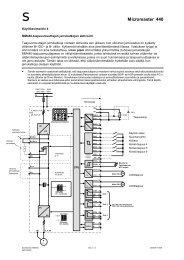
s Micromaster 440<br />
Käyttöesimerkki 2<br />
Käynnistyskäsky käyntiin <strong>eteen</strong>/käyntiin <strong>taakse</strong>, sekä mekaanisen jarrun ohjaus<br />
Taajuusmuuttajaa halutaan ohjata kahdella digitaalitulolla siten, että digitaalitulo 1 = käyntiin <strong>eteen</strong><br />
ja digitalitulo 2 = käyntiin <strong>taakse</strong>. Taajuusmuuttajaa ei tarvitse pysäyttää käskyjen vaihdon aikana.<br />
Toiminnan aktivoimiseksi käytetään taajuusmuuttajan vapaastiohjelmoitavia lohkoja (OR-piiri).<br />
Taajuusohje annetaan potikalla analogitulon 1 kautta.<br />
Lisäksi halutaan että taajuusmuuttaja itse ohjaa moottorin mekaanista jarrua (relelähtö 3).<br />
Analogilähtöön 2 halutaan moottorin ottama virta (0 -100 % = 0 – 20 mA)<br />
• Tämän esimerkin asetukset edellyttävät, että taajuusmuuttajan ja moottorin tehot sopivat toisiinsa sekä että pikakäyttöönotto<br />
on suoritettu pikakäyttöohjeen sivun 12 mukaisesti. Parametrointi voidaan suorittaa BOP- tai AOP-paneelin avulla sekä PC:n<br />
kautta (Starter tai Drive Monitor). Sovelluksen toimivuuden edellytys on ammattitaitoinen suunnittelu ja parametrointi.<br />
<strong>Siemens</strong> ei vastaa suunnittelussa ja/tai parametroinnissa tapahtuneiden virheiden aiheuttamista vahingoista. Tämä käyttöesimerkki<br />
on vapaasti käytettävissä ja muutettavissa käyttäjän vastuulla.<br />
1/3AC 200V - 240V<br />
3AC 380V - 480V<br />
PE<br />
Toimitusraja<br />
Ulkoinen<br />
jarruvastus<br />
Tehtaalla<br />
asennettu lenkki<br />
R<br />
L, N, (L1, L2) PE<br />
tai<br />
L1, L2, L3<br />
DC/R+<br />
B+/DC+<br />
B-<br />
DC-<br />
AC<br />
DC<br />
- +<br />
Jog<br />
Fn<br />
Ohjauspaneeli (lisälaite)<br />
P<br />
Kotelokoko<br />
A - F<br />
A<br />
D<br />
A<br />
10V+ 1<br />
0V 2<br />
AIN1+ 3<br />
AIN1- 4<br />
AIN2+ 10<br />
D<br />
I AIN2- 11<br />
DIN1 5<br />
DIN2 6<br />
DIN3 7<br />
DIN4 8<br />
DIN5 16<br />
DIN6 17<br />
Eristetty +24V 9<br />
(100 mA)<br />
Eristetty 0V 28<br />
‡ 4,7 kW<br />
10 V<br />
Taajuusohje<br />
Käyntiin <strong>eteen</strong><br />
Käyntiin <strong>taakse</strong><br />
Kuittaus<br />
Kiinteä taajuus 4<br />
Kiinteä taajuus 5<br />
Kiinteä taajuus 6<br />
Ulkoisen<br />
jarrukatkojan<br />
liitäntäpiste<br />
D/L+<br />
C/L-<br />
Kotelokoko<br />
FX ja GX<br />
CPU<br />
D<br />
A<br />
PTCA 14<br />
PTCB 15<br />
AOUT1+ 12<br />
AOUT1- 13<br />
Moottorin<br />
Termistori tai<br />
KTY-anturi<br />
Maks 500 W mA<br />
Lähtötaajuus<br />
+<br />
Ei käytetä<br />
ON ON<br />
60 Hz<br />
D<br />
A<br />
AOUT2+ 26<br />
AOUT2- 27<br />
Maks 500 W mA<br />
Lähtövirta<br />
50 Hz<br />
DIP-kytkin<br />
I/O – kortin alla<br />
COM 20<br />
NO 19<br />
NC 18<br />
Rele 1<br />
COM 22<br />
DC<br />
NO 21<br />
Rele 2<br />
30 V DC / 5A (resistiivinen)<br />
250 V AC / 2A (induktiivinen)<br />
AC<br />
AIN1 AIN2<br />
0-20 mA<br />
COM 25<br />
NO 24<br />
NC 23<br />
Rele 3<br />
0-10 V<br />
DIP-kytkin<br />
I/O - kortilla<br />
RS485<br />
P+ 29<br />
N- 30<br />
PE<br />
U, V, W<br />
M<br />
3~<br />
Sovellukset_<strong>MM440</strong> Sivu 1 / 2 2005-08-17/BA<br />
A&D Käytöt
s Micromaster 440<br />
Käyttöesimerkki 2<br />
Käynnistyskäsky käyntiin <strong>eteen</strong>/käyntiin <strong>taakse</strong>, sekä mekaanisen jarrun ohjaus<br />
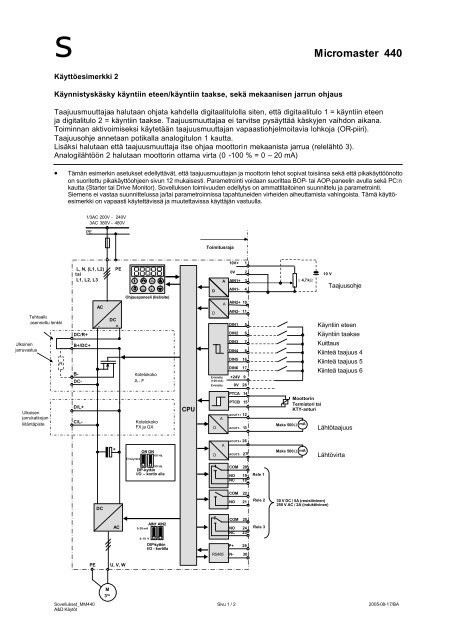
Parametri Indeksi Arvo Parmetritoiminta Valittu toiminta<br />
003 3 Parametrointilukko (oikeus) 3 = Ekspertti (1 = Normaali)<br />
0700 0 2 Ohjauspaikan valinta Riviliittimet (digitaalitulot)<br />
0701 0 99 Digitaalitulo 1 BICO-ohjelmointi Käyntiin <strong>eteen</strong><br />
07<strong>02</strong> 0 99 Digitaalitulo 2 BICO-ohjelmointi Käyntiin <strong>taakse</strong><br />
0703 0 9 Digitaalitulon 3 toiminta Kuittaus<br />
0704 0 15 Digitaalitulon 4 toiminta Kiinteä taajuus 4 (P1004)<br />
0705 0 15 Digitaalitulon 5 toiminta Kiinteä taajuus 5 (P1005)<br />
0706 0 15 Digitaalitulon 6 toiminta Kiinteä taajuus 6 (P1006)<br />
0731 0 52.3 Lähtöreleen 1 toiminta Häiriö<br />
0732 0 52.7 Lähtöreleen 2 toiminta Varoitus<br />
0733 0 52.C Lähtöreleen 3 toiminta Mekaanisen jarrun ohjaus *)<br />
0771 0 21 Analogilähdön 1 toiminta Lähtötaajuus<br />
0771 1 27 Analogilähdön 2 toiminta Lähtövirta (skaalaus P20<strong>02</strong>)<br />
1000 0 2 Taajuusohjeen valinta Analogitulo 1<br />
1080 0 0 Minimitaajuus 0 Hz<br />
1082 0 50 Maksimitaajuus 50 Hz ( skaalaus P2000 = 50 Hz)<br />
1120 0 10 Kiihdytysaika 10 s<br />
1121 0 10 Jarrutusaika 10 s<br />
0601 0 0 Moottorin lämpötilan valvonta Ei aktivoitu<br />
1237 - 0 Jarrukatkojan aktivointi Ei aktivoitu<br />
1240 0 1 Välipiirijännitesäätäjän aktivointi Aktivoitu<br />
2800 0 1 Ohjelmoitavien lohkojen aktivointi Aktivoitu<br />
2801 3 1 OR-piirin aktivointi Aktivoitu<br />
2816 0 722:0 OR-piiriin tulon 1 ohjelmointi DIN 1 kytketty OR-piiriin<br />
2816 1 722:1 OR-piiriin tulon 2 ohjelmointi DIN 2 kytketty OR-piiriin<br />
0840 0 2817:0 Käynti-käskyn ohjelmointi Käynti-käsky OR-piiristä<br />
1113 0 722:1 Suunnanvaihtokäskyn ohjelmointi Suunanvaihto DIN 2 kautta<br />
1215 0 1 Moottorijarrun ohjauksen vapautus Vapautettu<br />
1216 0 1 Jarrun päästöviive Päästöviive 1 s<br />
1217 0 1 Jarrun pitoaika alasajon jälkeen Pitoaika 1 s<br />
*) Moottorin mekaaninen jarru vapautetaan relelähtö 3:n vetäessä, kun<br />
taajuusmuuttaja on saavuttanut minimitaajuutensa. Päästö- ja pitoviiveet astetaan<br />
parametreillä P1216 ja P1217.<br />
Sovellukset_<strong>MM440</strong> Sivu 2 / 2 2005-08-17/BA<br />
A&D Käytöt