Micromaster 440 -käyttöohje - Siemens
Micromaster 440 -käyttöohje - Siemens
Micromaster 440 -käyttöohje - Siemens

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
MICROMASTER <strong>440</strong>Käyttöohje ja parametrit 09/2005
EsipuheMICROMASTER <strong>440</strong>Käyttöohje ja parametritVersio 09/2005Määritelmät ja varoituksetTurvaohjeetAsennus 1YleistäMekaaninen asennusSähköinen asennusKäyttöönotto 2Parametrit 3Lohkokaaviot 4Hälytykset javaroituksetLiitteet5ABCDEFGHIJKLMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 3
Lisätietoja saa internet-osoitteesta:http://www.siemens.fi/adHyväksytty <strong>Siemens</strong> Quality for Software and TrainingDIN ISO 9001, Rek. Nro. 2160-01Tämän asiakirjan tai sen sisällön monistaminen,luovuttaminen tai muu käyttäminen on kielletty ilmankirjallista lupaa. Tätä rikkovat vastaavat aiheutetuistavahingoista. Kaikki oikeudet pidätetään, mukaan lukienpatentti-, hyödyllisyysmalli ja mallioikeudet.© <strong>Siemens</strong> AG 2001. Kaikki oikeudet pidätetään.MICROMASTER® on <strong>Siemens</strong>-yhtiön rekisteröimätavaramerkki.Käytettävissä voi olla toimintoja, joita ei ole kuvattu tässäasiakirjassa. Tämä ei kuitenkaan velvoita toimittamaantällaisia toimintoja uuden ohjausjärjestelmän mukana taihuollon yhteydessä.Olemme tarkistaneet, että asiakirjan sisältö vastaakuvattua laitteistoa ja ohjelmistoa. Eroavaisuuksia voikuitenkin olla, eikä takuuta anneta siitä, että toisaaltakuvaus ja toisaalta laitteisto ja ohjelmisto ovat yhtenevät.Asiakirjaan sisällytetyt tiedot tarkistetaan aika ajoin, jatarvittavat muutokset sisällytetään seuraavaanpainokseen. Otamme mielihyvin vastaan kaikkiparannusehdotukset.Asiakirjaan voidaan tehdä muutoksia ilmanennakkoilmoitusta.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit4 09/2005
Määritelmät ja varoituksetOnnettomuusvaaraTarkoittaa tämän käyttöohjeen tai tuotteeseen liitettyjen varoitustekstienmerkityksessä sitä, että seurauksena on kuolema, vakavia ruumiinvammoja taihuomattavia esinevahinkoja, jos asiaankuuluvia varotoimenpiteitä ei noudateta.VaroitusTarkoittaa tämän käyttöohjeen tai tuotteeseen liitettyjen varoitustekstienmerkityksessä sitä, että seurauksena voi olla kuolema, vakavia ruumiinvammojatai huomattavia esinevahinkoja, jos asiaankuuluvia varotoimenpiteitä ei noudateta.VaaraTarkoittaa tämän käyttöohjeen tai tuotteeseen liitettyjen varoitustekstienmerkityksessä sitä, että seurauksena voi olla lieviä ruumiinvammoja tai vähäisiäaineellisia vahinkoja, jos asiaankuuluvia varotoimenpiteitä ei noudateta.Huom.Tarkoittaa tämän käyttöohjeen merkityksessä tärkeää, erityisen huomion arvoistatietoa tuotteesta tai kyseessä olevasta käyttöohjeen osasta.Asianmukaisesti pätevöitynyt henkilöTarkoittaa tämän käyttöohjeen tai tuotteeseen liitettyjen varoitustekstienmerkityksessä henkilöitä, jotka ovat perehtyneet tuotteen kokoamiseen,asentamiseen, käyttöön ottamiseen ja käyttöön sekä näihin töihin liittyviinvaaroihin.Henkilöllä on oltava seuraavanlainen pätevyys:1. Saanut koulutuksen, opastuksen tai muulla tavalla pätevyyden kytkeä japurkaa, maadoittaa ja merkitä virtapiirejä ja laitteita turvateknisten määräystenmukaisesti.2. Saanut turvallisuusteknisten normien mukaista koulutusta tai opastustasoveltuvien turvateknisten varusteiden hoidosta ja käytöstä.3. Saanut ensiapukoulutusta.PE= Ground♦ Suojamaadoitus (PE) – Suojamaadoitus käyttää piirisuojajohdattimia, jotkasoveltuvat oikosulkuihin, joissa jännite ei nouse yli 50:een volttiin. Tätäyhteyttä käytetään tavallisesti taajuusmuuttajan maadoitukseen.♦- Maadoitus, missä vertailujännite voi olla sama kuin maadoitusjännite.Tätä yhteyttä käytetään tavallisesti moottorin maadoitukseen.Käytä vain oikeaan tarkoitukseenYhteysosoiteLaitteistoa saa käyttää vain siihen tarkoitukseen, joka sille on määritettykäyttöohjeessa, ja yhdessä vain sellaisten laitteiden ja osien kanssa, joita <strong>Siemens</strong>on hyväksynyt tai joita se suosittelee.Jos kohtaat ongelmia tai jos herää kysymyksiä tätä käyttöohjetta lukiessasi, otayhteys <strong>Siemens</strong> Osakeyhtiöön sähköpostitse: ad.myynti@siemens.fiMICROMASTER <strong>440</strong>Käyttöohje ja parametrit6 09/2005
TurvaohjeetYleistäSeuraavat varoitukset ja huomautukset on annettu turvallisuuden vuoksi. Niidenavulla voit estää tuotteelle sekä muille laitteistolle ja sen komponenteille koituvatvahingot. Tässä kappaleessa luetellaan varoituksia ja huomautuksia, jotka pätevätyleisesti, kun käsitellään MICROMASTER <strong>440</strong> -taajuusmuuttajia. Nämäkäsittelytavat sisältyvät kappaleissa Yleistä, Kuljetus ja varastointi,Käyttöönotto, Käyttö, Korjaus sekä Purkaminen ja hävittäminen esitettyihintietoihin.Erityiset varoitukset ja Huomautukset, jotka koskevat erityisiä toimenpiteitä, onesitetty kunkin kappaleen alussa ja ne toistetaan soveltuvissa kohdissa näidenkappaleiden sisässä.Lue tiedot huolellisesti, koska ne on esitetty Sinun turvallisuutesi vuoksi jaauttavat myös pidentämään MICROMASTER <strong>440</strong> -taajuusmuuttajan ja siihenkytketyn laitteiston kestoikää.Vaara♦ Tämä laite tuottaa vaarallisia jännitteitä ja ohjaa pyöriviä tai liikkuviamekaanisia osia. Kuolema, vakava ruumiinvamma tai huomattavatlaitevahingot voivat olla seurauksena, jos tässä käyttöohjeessa olevia ohjeitaei noudateta.♦ Laitteita saa käyttää vain pätevä henkilöstö. Henkilöstön on tutustuttavatämän käyttöohjeen turvallisuusohjeisiin ja oltava selvillä toimenpiteistä, jotkakoskevat laitteen kuljettamista, asennusta ja käyttöä. Laitteen toimiva jaturvallinen käyttö riippuu oikeasta asennuksesta, käyttöönotosta ja huollosta.♦ Sähköiskuvaara. Välipiirikondensaattorit pitävät varauksensa viisi minuuttiajännitteen pois kytkemisen jälkeen. Laitetta ei saa avata ennen kuin 5minuuttia on kulunut syöttöjännitteen katkaisemisesta.♦ Tehoarvot pätevät <strong>Siemens</strong> 1LA -sarjan moottoreihin, ja ne ovatohjeellisia. Ne eivät välttämättä ole yhdenmukaisia UL- tai NEMAarvojenkanssa.Varoitus♦ Lasten ja muiden ulkopuolisten henkilöiden asiaton oleskelu laitteen lähelläon estettävä!♦ Laitetta saa käyttää vain valmistajan määräämiin tarkoituksiin. Asiattomatmuutokset ja sellaisten varaosien ja lisälaitteiden käyttö, jotka eivät sisällyvalmistajan myyntiartikkeleihin tai suosituksiin, voivat aiheuttaa tulipaloja,sähköiskuja ja loukkaantumisia.Huom.♦ Säilytä Käyttöohje helposti esille saatavina lähellä laitetta sekä varmista, ettäne ovat jokaisen koneen käyttäjän käytettävissä.♦ Aina kun on tehtävä mittauksia tai testauksia jännitteelliselle laitteistolle,turvaohjeen BGV A2 määräyksiä on noudatettava, “Sallitut poikkeuksettyöskenneltäessä jännitteellisten osien kanssa”. Käytä tarkoitukseensoveltuvia elektronisia työkaluja.♦ Lue turvaohjeet, varoitukset ja laitteeseen kiinnitetyt varoitustarrat huolellisestiennen asennusta ja käyttöönottoa. Varmista, että kaikki varoituksia sisältävättarrat pysyvät luettavina ja uusi puuttuvat tai vahingoittuneet tarrat.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 7
Kuljetus ja varastointiVaara♦ Asianmukainen kuljetus, varastointi, paikalleen asennus ja kiinnitys sekähuolellinen käyttö ja huolto ovat oleellisen tärkeitä laitteen oikean jaturvallisen toiminnan varmistamiseksi.Varoitus♦ Suojaa taajuusmuuttajaa iskuilta ja tärinältä kuljetuksen ja varastoinninaikana. Suojaa sitä myös vedeltä (sateelta) ja liian korkeilta lämpötiloilta (ks.Taulukko 1-2).KäyttöönottoVaara♦ Epäpätevän henkilöstön työskentely laitteen/järjestelmän parissa taivaroitusten noudattamatta jättäminen voi aiheuttaa loukkaantumisia tai suuriaesinevahinkoja. Vain asianmukaisesti pätevöitynyt henkilöstö, joka on saanutkoulutuksen laitteen/järjestelmän asennukseen, käyttöönottoon ja käyttöön,saa tehdä työtä laitteen/järjestelmän parissa.♦ Tulopuolen syöttöjänniteliitäntöjen on oltava kiinteitä. Laite on maadoitettava(IEC 536 luokka 1, NEC ja muut soveltuvat standardit).♦ Jos on käytettävä jäännösjännitteellä toimivia suojalaitteita (RCD), niiden onoltava RCD -tyyppiä B.♦ 3-vaihelaitteita, joissa on EMC -suodattimia, ei saa kytkeä verkkoonvikavirtasuojakytkimen kautta.♦ Seuraavissa liittimissä voi olla vaarallisia jännitteitä myös laitteenpoiskytkennän jälkeen:- verkkosyöttöliittimet L/L1, N/L2, L3.- lähtöliittimet (moottori) U, V, W, DC+/B+, DC-, B- and DC/R+♦ Tätä laitetta ei saa käyttää hätäpysäytyslaitteena.VaroitusSyöttöjännite-, moottori- ja ohjauskaapelit taajuusmuuttajalle on vedettävä kuvan2-6 esittämällä tavalla, jotta induktiiviset tai kapasitiiviset häiriöt eivät pääsehaittamaan taajuusmuuttajan toimintaa.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit8 09/2005
KäyttöVaara♦ MICROMASTER-laitteet toimivat korkeilla jännitteillä.♦ Kun sähköisiä laitteita käytetään, on välttämättä tuoda niiden joihinkin osiinvaarallisia jännitteitä.♦ Standardien EN 60204 IEC 204 (VDE 0113) mukaistenhätäpysäytyslaitteiden on pysyttävä toiminnassa taajuusmuuttajan kaikissatoimintamuodoissa. Hätäpysäytyslaitteen vapauttaminen ei saa johtaa siihen,että laitteisto käynnistyy uudelleen hallitsemattomasti tai määrittämättömästi.♦ Niissä tapauksissa, joissa ohjauslaitteiston mahdollinen vika voi aiheuttaahuomattavia esinevahinkoja tai jopa vakavan ruumiinvamman (so.potentiaalisesti vaaralliset viat), turvallinen käyttö ja toiminta myösvikatapauksissa on varmistettava ylimääräisillä ulkoisilla varotoimilla (so.itsenäisesti toimivilla rajakytkimillä, mekaanisilla lukituksilla jne.).♦ Tietyillä parametriasetteluilla laite voi käynnistyä automaattisestiverkkokatkoksen jälkeen.♦ Moottoriparametrien pitää olla asetettu oikein, jotta moottorinylikuormitussuojaus toimisi kunnolla.♦ Laitteella pystytään järjestämään sisäisen moottorin ylikuormitussuojausstandardin UL508C mukaisesti. Ks. parametrit P0610 (taso 3) ja P0335, I 2 t onPÄÄLLÄ oletusarvona. Moottorin ylikuormitussuojaus voidaan toteuttaamyös käyttämällä ulkoista PTC -elintä (oletusarvona P0601 estetty).♦ Laite soveltuu käytettäväksi verkossa, joka pystyy syöttämään virtaa enintään10kA (tehollisarvo) maksimijännitteellä 230V/460V/575V suojattuna H- tai K-tyyppisellä sulakkeella (ks. taulukko 1-5).♦ Laitetta ei saa käyttää hätäpysäytysmekanismina.KorjausVaara♦ Laitteen korjauksen saa suorittaa vain <strong>Siemens</strong>-huolto, <strong>Siemens</strong>invaltuuttamat huoltoliikkeet tai asianmukaisesti pätevöitynyt henkilöstö, jokaon perehtynyt huolellisesti kaikkiin varoituksiin ja tämän käyttöohjeensisältämiin toimintamenettelyihin.♦ Kaikki vialliset osat tai komponentit on korvattava käyttämällävaraosaluetteloihin sisällytettyjä osia.♦ Kytke laitteen sähkönsyöttö irti, ennen kuin avaat laitteen käsittelyä varten.Purkaminen ja hävittäminenHuom.♦♦Taajuusmuuttajan pakkausmateriaalit kelpaavat kierrätettäväksi. Säilytäpakkaukset mahdollisen myöhemmän käyttötarpeen varalta.Helposti irrotettavien ruuvi- ja hakasliitosten ansiosta laite voidaan purkaaosiin helposti. Voit tämän jälkeen kierrättää osat, hävittää ne paikallistenjätehuoltomääräyksien mukaisesti.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 9
1. AsennusVaara♦ Epäpätevän henkilöstön työskentely laitteen/järjestelmän parissa taivaroitusten noudattamatta jättäminen voi aiheuttaa loukkaantumisia tai suuriaesinevahinkoja. Vain asianmukaisesti pätevöitynyt henkilöstö, joka on saanutkoulutuksen laitteen/järjestelmään asennukseen, käyttöönottoon ja käyttöön,saa tehdä työtä laitteen/järjestelmän parissa.♦ Tulopuolen syöttöjänniteliitäntöjen on oltava kiinteitä. Laite on maadoitettava(IEC 536 luokka 1, NEC ja muut soveltuvat standardit).♦ Jos on käytettävä jäännösjännitteellä toimivia suojalaitteita (RCD), niiden onoltava RCD -tyyppiä B.♦ 3-vaihelaitteet, joissa on EMC-suodatin, ei saa kytkeä verkkoonvikavirtasuojakytkimen (ELCB ) kautta.♦ Seuraavissa liittimissä voi olla vaarallisia jännitteitä myös laitteenpoiskytkennän jälkeen:- verkkosyöttöliittimet L/L1, N/L2, L3.- lähtöliittimet (moottori) U, V, W, DC+/B+, DC-, B- ja DC/R+♦ Odota jännitteen poiskytkemisen jälkeen aina 5 minuuttia, jotta vaarallinenjännite ehtii purkautua, ja aloita asennustyö vasta sitten.♦ Tätä laitetta ei saa käyttää hätäpysäytysmekanismina.♦ Maapotentiaaliin liittävän johdon poikkipinnan on oltava yhtä suuri taisuurempi kuin syöttöjännitejohdoissa.VaroitusSyöttöjännite-, moottori- ja ohjauskaapelit taajuusmuuttajalle on vedettävä kuva 2-6 esittämällä tavalla, jotta induktiiviset ja kapasitiiviset häiriöt eivät pääsehaittamaan taajuusmuuttajan toimintaa.1.1 YleistäVarastoinnin jälkeinen asennusPitkäaikaisen varastoinnin jälkeen kondensaattorit on aktivoitava uudelleen.On tärkeää, että varastointiaika lasketaan valmistuksesta alkaen, eikätoimituksesta. Aktivointi on tehtävä alla olevan taulukon mukaisesti.Varastointiaika Vaadittava toimenpide Aktivointiaika1 vuosi tai vähemmän Uudelleenaktivointia ei tarvita. Ei uud. aktivointia1-2 vuotta2-3 vuotta3 vuotta ja enemmänKytke jännitteen syöttö taajuusmuuttajalle noinyhdeksi tunniksi ennen RUN-komennon antamista. Käytä säädettävää jännitesyöttöä. Syötä 25% syöttöjännite 30 minuutiksi. Nosta syöttöjännite 50%:iin 30 minuutiksi. Nosta syöttöjännite 75%:iin 30 minuutiksi. Nosta syöttöjännite 100%:iin 30 minuutiksi. Taajuusmuuttaja valmis RUN-komennolle. Käytä säädettävää jännitesyöttöä. Syötä 25% syöttöjännite 2 tunniksi. Nosta syöttöjännite 50%:iin vielä 2 tunniksi. Nosta syöttöjännite 75%:iin taas 2 tunniksi. Nosta syöttöjännite 100%:iin vielä 2 tunniksi. Taajuusmuuttaja valmis RUN-komennolle.Taulukko 1-1 Varastoinnin jälkeinen asennus1 tunti2 tuntia8 tuntiaMICROMASTER <strong>440</strong>Käyttöohje ja parametrit10 09/2005
1.2 Käytön ympäristöolosuhteetLämpötilaKehyskoko A B C D E FMin. [° C] -10 -10 -10 -10 -10 -10Maks. [° C] 50 50 50 50 50 50Maks. (neliöllinen momentti)[° C]- - 40 40 40 40Taulukko 1-2 Taajuusmuuttajan käyttölämpötilatHuom.Neliöllinen momentti on taajuusmuuttajan kyky lisätä nimellinen lähtötehokäytettäväksi pumppu- ja puhallinkäytöille.Kun valitaan tämä säätötapa, taajuusmuuttajassa ei enää oleylikuormitusvalmiutta.Kosteusalue95%, ei kondensoitumista.Korkeus merenpinnastaIskutTärinäJos taajuusmuuttaja asennetaan > 1000m merenpinnan yläpuolelle, käyttöarvojaon alennettava. (Katso MICROMASTER <strong>440</strong> -käsikirja (Reference Manual))Älä pudota taajuusmuuttajaa tai altista sitä iskuille.Älä asenna taajuusmuuttajaa paikkaan, jossa se altistuu jatkuvalle tärinälle.Sähkömagneettinen säteilyIlman epäpuhtaudetVesiÄlä asenna taajuusmuuttajaa sähkömagneettisten säteilylähteiden lähelle.Älä asenna taajuusmuuttajaa ympäristöön, jonka ilma sisältää runsaastiepäpuhtauksia, kuten pölyä, syövyttäviä kaasuja tms.Varmista, että taajuusmuuttaja ei kastu asennuspaikassaan. Älä asenna sitäputkien alle, jos näiden putkien ulkopinnalle pääsee tiivistymään kosteutta. Äläasenna taajuusmuuttajaa paikkaa, jossa saattaa esiintyä liiallista kosteutta taikosteuden tiivistymistä.Asennus ja ylikuumeneminenVaaraTaajuusmuuttajia EI SAA asentaa vaaka-asentoon.Asenna taajuusmuuttaja pystyasentoon, jotta jäähdytys on mahdollisimman hyvä.Taajuusmuuttajia on myös mahdollista asentaa vierekkäin.Varmista, että taajuusmuuttajan ilma-aukot eivät ole tukossa. Jätä 100 mm vapaatila taajuusmuuttajan ylä- ja alapuolelle.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 11
41.3 Mekaaninen asennusVaaraTÄMÄ LAITE ON MAADOITETTAVA.♦♦♦Laitteiston turvallisen toiminnan varmistamiseksi laitteiston saa asentaa jaottaa käyttöön vain asianmukaisesti pätevöitynyt henkilö tämän käsikirjanohjeita noudattaen.Kiinnitä erityistä huomiota yleisiin ja paikallisiin asennus- ja turvaohjeisiin,jotka koskevat työtä vaarallisten jännitteiden parissa (ks. esim. EN 50178)sekä ohjeisiin, jotka koskevat oikeiden työkalujen ja suojavarusteiden käyttöä.Verkkosyöttö-, välipiiri- ja moottoriliitännöissä voi olla vaarallisen suuri jännite,vaikka taajuusmuuttaja olisi pois toiminnasta. Odota poiskytkemisen jälkeen 5minuuttia, kunnes varaus on purkautunut, ja jatka asennustöitä vasta sitten.Runkokoko Frame Size A Runkokoko Frame Size B Runkokoko Frame Size CC55 mm0.22"160 mm6.30"Ø 4.8 mm Operator0.19" Panel174 mm6.85"Ø 5.5 mm0.22"OperatorPanel204 mm8.03"Ø 4.5 mm0.17"138 mm5.43"174 mm6.85"Runkokoko Frame Size D D Runkokoko Frame Size E E Runkokoko Frame Size F FØ 17.5 mm0.68"OperatorPanelOperatorPanelØ 17.5 mm0.68" Ø15mm0.59"OperatorPanel486 mm19.13"616.4 mm24.27"810 mm31.89"WithFilter1110 mm43.70"235 mm9.25"235 mm9.25"300 mm11.81"MICROMASTER <strong>440</strong>Käyttöohje ja parametrit12 09/2005
Runkokoko FXRunkokoko GXKuva 2-1 Porausmallit – MICROMASTER <strong>440</strong>MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 13
Taulukko 1-3 MM<strong>440</strong>-taajuusmuuttajan laitekoot ja kiristysmomentit (kaikki kehyskoot)Kehys UlkomitatKiinnitysKiristysmomentti-koko Korkeus Leveys SyvyysA 173 mm 73 mm 149 mmB 202 mm 149 mm 172 mmC 245 mm 185 mm 195 mmD 520 mm 275 mm 245 mmE 650 mm 275 mm 245 mmF850 mmsuotimella1150 mm350 mm 320 mmFX 1400 mm 326 mm 356 mmGX 1533 mm 326 mm 545 mm2 x M4 Pulttia2 x M4 Mutteria2 x M4 AluslevyäKiinnitys DIN-kiskoon4 x M4 Pulttia4 x M4 Mutteria4 x M4 Aluslevyä4 x M5 Pulttia4 x M5 Mutteria4 x M5 Aluslevyä4 x M8 Pulttia4 x M8 Mutteria4 x M8 Aluslevyä4 x M8 Pulttia4 x M8 Mutteria4 x M8 Aluslevyä4 x M8 Pulttia4 x M8 Mutteria4 x M8 Aluslevyä6 x M8 Pulttia6 x M8 Mutteria6 x M8 Aluslevyä6 x M8 Pulttia6 x M8 Mutteria6 x M8 Aluslevyä2.5 Nmaluslevyjen kanssa2.5 Nmaluslevyjen kanssa2.5 Nmaluslevyjen kanssa3.0 Nmaluslevyjen kanssa3.0 Nmaluslevyjen kanssa3.0 Nmaluslevyjen kanssa13 Nm +30%aluslevyjen kanssa13 Nm +30%aluslevyjen kanssa1.4 Tehohäviöt, asennustila ja ilmamääräAlla mainitut mitat tulee täyttyä asennettaessa MICROMASTER 4.Alla olevat arvot ovat suotimettomilla laitteilla. Voidaan kuitenkin olettaa,että suotimella varustetuissa laitteissa on samat arvot.Taulukko 1-4 Tehohäviöt, asennustilavaatimukset ja tarvittava ilmamääräTilausnumeroTehohäviöt(W)Vapaa asennustilataajuusmuuttajanalapuolella – (mm)Vapaa asennustilataajuusmuuttajanyläpuolella – (mm)Ilmamäärä(m 3 /min1-vaihe 230V6SE6<strong>440</strong>-2UC11-2AA1 5 100 100 0.296SE6<strong>440</strong>-2UC12-5AA1 10 100 100 0.296SE6<strong>440</strong>-2UC13-7AA1 15 100 100 0.296SE6<strong>440</strong>-2UC15-5AA1 22 100 100 0.296SE6<strong>440</strong>-2UC17-5AA1 30 100 100 0.296SE6<strong>440</strong>-2UC21-1BA1 39 100 100 1.446SE6<strong>440</strong>-2UC21-5BA1 53 100 100 1.446SE6<strong>440</strong>-2UC22-2BA1 77 100 100 1.446SE6<strong>440</strong>-2UC23-0CA1 90 100 100 3.28MICROMASTER <strong>440</strong>Käyttöohje ja parametrit14 09/2005
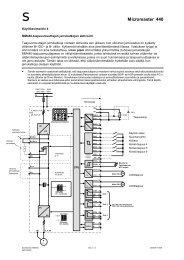
Vapaa asennustilataajuusmuuttajanalapuolella – (mm)Vapaa asennustilataajuusmuuttajanyläpuolella – (mm)Vapaa asennustilataajuusmuuttajanedessä – (mm)TilausnumeroTehohäviöt(W)Ilmamäärä(m 3 /min)3-vaihe 400V6SE6<strong>440</strong>-2UD13-7AA1 15 100 100 - 0.296SE6<strong>440</strong>-2UD15-5AA1 22 100 100 - 0.296SE6<strong>440</strong>-2UD17-5AA1 30 100 100 - 0.296SE6<strong>440</strong>-2UD21-1AA1 39 100 100 - 0.296SE6<strong>440</strong>-2UD21-5AA1 53 100 100 - 0.296SE6<strong>440</strong>-2UD22-2BA1 77 100 100 - 1.446SE6<strong>440</strong>-2UD23-0BA1 90 100 100 - 1.446SE6<strong>440</strong>-2UD24-0BA1 120 100 100 - 1.446SE6<strong>440</strong>-2UD25-5CA1 165 100 100 - 3.286SE6<strong>440</strong>-2UD27-5CA1 225 100 100 - 3.286SE6<strong>440</strong>-2UD31-1CA1 330 100 100 - 3.286SE6<strong>440</strong>-2UD31-5DA1 450 300 300 - 3.286SE6<strong>440</strong>-2UD31-8DA1 555 300 300 - 3.286SE6<strong>440</strong>-2UD32-2DA1 660 300 300 - 3.286SE6<strong>440</strong>-2UD33-0EA1 900 300 300 - 6.606SE6<strong>440</strong>-2UD33-7EA1 1100 300 300 - 6.606SE6<strong>440</strong>-2UD34-5FA1 1350 350 350 - 9.006SE6<strong>440</strong>-2UD35-5FA1 1650 350 350 - 9.006SE6<strong>440</strong>-2UD37-5FA1 2250 350 350 - 9.006SE6<strong>440</strong>-2UD38-8FA1 2700 250 150 40 13.516SE6<strong>440</strong>-2UD41-1FA1 3300 250 150 40 13.516SE6<strong>440</strong>-2UD41-3GA1 3960 250 150 50 26.396SE6<strong>440</strong>-2UD41-6GA1 4800 250 150 50 26.396SE6<strong>440</strong>-2UD42-0GA1 6000 250 150 50 26.391.5 Sähköinen asennusVaaraTÄMÄ LAITE ON MAADOITETTAVA.♦ Laitteiston turvallisen toiminnan varmistamiseksi laitteiston saa asentaa jaottaa käyttöön vain asianmukaisesti pätevöitynyt henkilö tämän käsikirjanohjeita noudattaen.♦♦♦Kiinnitä erityistä huomiota yleisiin ja paikallisiin asennus- ja turvaohjeisiin,jotka koskevat työtä vaarallisten jännitteiden parissa (ks. esim. EN 50178)sekä ohjeisiin, jotka koskevat oikeiden työkalujen ja suojavarusteiden käyttöä.Verkkosyöttö-, välipiiri- ja moottoriliitännöissä voi olla vaarallisen suuri jännite,vaikka taajuusmuuttaja olisi pois toiminnasta. Odota poiskytkemisen jälkeen 5minuuttia, kunnes varaus on purkautunut, ja jatka asennustöitä vasta sitten.Taajuusmuuttajat voidaan asentaa vierekkäin, mutta jos taajuusmuuttajatasennetaan päällekkäin laitteiden väli täytyy olla ainakin 100 mm.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 15
1.5.1 YleistäVaaraTaajuusmuuttaja on aina maadoitettava. Jos taajuusmuuttajaa ei maadoitetaoikein, sen sisään voi muodostua erittäin vaarallisia jännitteitä, jotka voivat ollahengenvaarallisia.Käyttö maadoittamattomassa (IT) syöttöverkossaMICROMASTER toimii maadoittamattomassa verkossa ja pysyy toiminnassa, jossyötön vaihe oikosuljetaan maahan. Jos moottorisyötön vaihe oikosuljetaanmaahan, MICROMASTER menee häiriötilaan ja antaa virheilmoituksen F0001.Kun laite kytketään maadoittamattomaan syöttöverkkoon, laitteen sisältä onpoistettava ‘Y’ -kondensaattori ja lähtökuristin on kytkettävä paikalleen. Menettelykyseisen kondensaattorin poistamiseksi on esitetty liitteissä G, H, I ja J.Käyttö vikavirtalaitteiden kanssaJos laitteeseen on liitetty vikavirtasuoja (RCD), MICROMASTER-taajuusmuuttajattoimivat häiriöttä sillä edellytyksellä, että: Käytetään B-tyypin jäännösvirtaa sisältävää (RCD) laitetta. RCD:n häiriöraja on 300mA. Syötön nollajohto on maadoitettu. Vain yhtä taajuusmuuttajaa syötetään kustakin RCD-laitteesta. Moottorijohdon pituus on alle 50m (maadoitettu) tai 100m (maadoittamaton).Käyttö pitkien kaapeleiden kanssaVaroitusOhjaus-, syöttö- ja moottorijohdot on vedettävä erillään. Älä vedä niitä samassakaapelikourussa. Älä koskaan testaa taajuusmuuttajaan kytkettyjä kaapeleitasuurjännitteisellä eristystestauslaitteella.Kaikki taajuusmuuttajat toimivat täysin teknisin arvoin vielä 50m pitkillämaadoitetuilla kaapeleilla ja 100m pitkillä maadoittamattomilla kaapeleilla.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit16 09/2005
1.5.2 Syöttö- ja moottoriliitinnätVaara♦ Erota verkkosyöttö jännitteestä, ennen kuin ryhdyt tekemään tai muuttamaansyöttöjohdon kytkentöjä laitteelle.♦ Varmista, että moottori on tarkoitettu kyseessä olevalle syöttöjännitteelle:yksi-/kolmivaiheisia 230 V MICROMASTER-laitteita ei saa kytkeäsuurempaan syöttöjännitteeseen.♦ Kun kytketään synkronimoottoreita tai kun kytketään useampia moottoreitarinnakkain, taajuusmuuttajaa on ajettava jännite/taajuussäätötavalla (P1300 =0, 2 tai 3).VaroitusKun verkkosyöttö- ja moottorit on kytketty oikeisiin liittimiin, varmista, että kaikkikannet ovat paikoillaan ennen jännitteen syöttämistä laitteelle!Huom.♦ Varmista, että syöttöverkon ja taajuusmuuttajan väliin on kytketty oikeanlaisetkatkaisijat/sulakkeet, joilla on teknisten tietojen mukainen oikea virta-arvo (ks.taulukko 1-5).♦ Käytä vain luokan 1 60/75 o C kuparijohtoa (UL-sopivuuden takia).Kiristysmomentit, katso taulukko 1-3.♦ Kiristä teholiittimet 4 - 5 mm:n ristipääruuvimeisselillä.Syöttö- ja moottoriliitäntöihin pääsyMICROMASTER <strong>440</strong> -taajuusmuuttajan syöttö- ja moottoriliitäntöihin pääsy onesitetty liitteissä. Katso myös käyttöohjeen takakannen sisäpuolella oleviavalokuvia, joissa on esitetty teholiittimet ja ohjausliittimet.Kun kannet on poistettu ja liittimet saatu esiin, kytke syöttö- ja moottoriliittimetseuraavalla sivulla esitetyllä tavalla.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 17
Runkokoko ARunkokoko B ja CRunkokoko D ja ERunkokoko FKuva 2-1MICROMASTER <strong>440</strong> –teholiitännätMICROMASTER <strong>440</strong>Käyttöohje ja parametrit18 09/2005
1.5.3 <strong>Micromaster</strong> <strong>440</strong> runkokoko FX -teholiitännätNostokoukutHoisting eyesMaadoitusliitin, PEShield connectionMains cable PELäpiviennit syötöille,Cable opening forU1/L1, W1/L2, W1/L3mains conectionU1/L1, V1/L2, W1/L3Läpiviennit, C/L+ D/LulkopuoliselleCable opening C/L+ D/Lforconnection of anjarruhakkurilleexternal braking unitSyöttöliittimet,Mains cablePhase U1/L1, U1/L1, V1/L2, V1/L2, W1/L3 W1/L3Y-kondensaattorit Connection toY-CapacitorUlkopuolisen jarruhakkurinliittimetC/L+ Connection D/L- C/L+ D/Lforexternal asennuskisko braking unitYlempiYlempi kiinnitysruuviTop adjustment railTop retaining screwNäyttöpaneeliStatus Display PanelElektroniikkaosa Electronic box(ohjausliittimet)Alempi asennuskiskoBottom adjustment railAlempi kiinnitysruuviBottom retaining screwPuhaltimen kiinnitysruuvitFan screwsPuhallinFanOhjauskaapelin Shield connection vaipankiinnitys control leadsPuhaltimen sulakkeetFan fusesMuuntajasovitinMoottorikaapeliliittimetTransformer adaptionU2/T1, V2/T2, Motor W2/T3 cablePhase Maadoitusliitin, U2/T1, V2/T2, PE W2/T3Motor cablePE Shield connectionKuva 2-3 <strong>Micromaster</strong> <strong>440</strong> runkokoon FX teholiitännätMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 19
1.5.4 <strong>Micromaster</strong> <strong>440</strong> runkokoko GX –teholiitännätNostokoukut Hoisting eyesMaadoitusliitin, Shield connection PEMains cable PELäpiviennitCablesyötöille,opening forU1/L1, W1/L2, mains W1/L3 conectionU1/L1, V1/L2, W1/L3Läpiviennit, C/L+ D/LulkopuoliselleCable opening C/L+ D/Lforconnection of anjarruhakkurilleexternal braking unitSyöttöliittimet, Mains cablePhase U1/L1, U1/L1, V1/L2, V1/L2, W1/L3 W1/L3Y-kondensaattorit Connection toY-CapacitorUlkopuolisen Connection jarruhakkurinC/L+ D/Lforexternal braking unitliittimetC/L+ D/L-Ylempi asennuskiskoTop adjustment railYlempi Top kiinnitysruuvi retaining screwNäyttöpaneeli Status Display PanelElektroniikkaosa Electronic Box(ohjausliittimet)Alempi asennuskiskoBottom adjustment railAlempiBottomkiinnitysruuviretaining screwPuhaltimen kiinnitysruuvitFan screwsPuhallinFanOhjauskaapelin Shield connection vaipankiinnitys control leadsPuhaltimen sulakkeet Fan fusesMuuntajasovitinTransformer adaptionMoottorikaapeliliittimet Motor cablePhase U2/T1, U2/T1, V2/T2, V2/T2, W2/T3 W2/T3Maadoitusliitin,MotorPEcablePE Shield connectionKuva 2-4 <strong>Micromaster</strong> <strong>440</strong> runkokoon GX teholiitännätMICROMASTER <strong>440</strong>Käyttöohje ja parametrit20 09/2005
1.5.5 Tyypillinen asennusL3L2L1NSulake FuseSingle 1-vaihesyöttö Phase (Frame (Runkokoot Sizes A A-C) to C)Optional OptionalOptionalKontaktori VerkkokuristinContactor line chokeEMCFiltersuodin MICROMASTERMICROMASTERMoottoriMotorL/L1 UPEPEPEN/L2PEVWKaikki You should komponentit ensure that tulee you have maadoittaa a common yhteiseen grounding maadoituskiskoon point for all options and kuvan drives osoittamalla and motors - as tavalla. shownL3L2L1SulakeFuseThree Phase (Frame Sizes A to F)3-vaihesyöttö (Runkokoot A-F)Kontaktori OptionalContactorVerkkokuristin Optionalline chokeEMC Optional suodinFilterMICROMASTERMICROMASTERMoottoriMotorL3 UPEPEPEL2L1PEVWYou should ensure that you have a common grounding point for all options and drives and motors - as shownKaikki komponentit tulee maadoittaa yhteiseen maadoituskiskoon kuvan osoittamalla tavalla.L3L2L1Sulake FuseOptionalKontaktori EMC Optional suodin Verkkokuristin Optional MICROMASTER MoottoriContactor Filterline choke MICROMASTER MotorPE3-vaihesyöttö Three Phase (Frame (Runkokoot Sizes FX FX and ja GX) GX)PEL3L2UVL1 WPEYou should ensure that you have a common grounding point for all options and drives and motors - as shownKaikki komponentit tulee maadoittaa yhteiseen maadoituskiskoon kuvan osoittamalla tavalla.Kuva 2-5Moottori- ja syöttöliitännätMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 21
1.6 Sulakkeet, johdonsuojat, verkkokuristimet,lähtökuristimetTilausnumerokWSuositeltava(3NA/3NE)sulake (A)JohdonsuojantyyppiVerkkokuristinLähtökuristin1-vaihe 230V6SE6<strong>440</strong>-2UC11-2AA1 0,12 10 3RV1021-1EA10 6SE6400-3CC00-4AB3 6SE6400-3TC00-4AD36SE6<strong>440</strong>-2UC12-5AA1 0,25 10 3RV1021-1HA10 6SE6400-3CC00-4AB3 6SE6400-3TC00-4AD36SE6<strong>440</strong>-2UC13-7AA1 0,37 10 3RV1021-1JA10 6SE6400-3CC01-0AB3 6SE6400-3TC00-4AD36SE6<strong>440</strong>-2UC15-5AA1 0,55 16 3RV1021-1KA10 6SE6400-3CC01-0AB3 6SE6400-3TC00-4AD36SE6<strong>440</strong>-2UC17-5AA1 0,75 16 3RV1021-4AA10 6SE6400-3CC01-0AB3 6SE6400-3TC00-4AD36SE6<strong>440</strong>-2UC21-1BA1 1,1 20 3RV1021-4DA10 6SE6400-3CC02-6BB3 6SE6400-3TC01-0BD36SE6<strong>440</strong>-2UC21-5BA1 1,5 20 3RV1031-4EA10 6SE6400-3CC02-6BB3 6SE6400-3TC01-0BD36SE6<strong>440</strong>-2UC22-2BA1 2,2 32 3RV1031-4FA10 6SE6400-3CC02-6BB3 6SE6400-3TC01-0BD36SE6<strong>440</strong>-2UC23-0CA1 3,0 40 3RV1041-4JA10 6SE6400-3CC03-5CB3 6SE6400-3TC03-2CD3TilausnumerokWSuositeltava(3NA/3NE)sulake (A)JohdonsuojantyyppiVerkkokuristinLähtökuristin3-vaihe 400V6SE6<strong>440</strong>-2UD13-7AA1 0,37 10 3RV1021-1CA10 6SE6400-3CC00-2AD3 6SE6400-3TC00-4AD26SE6<strong>440</strong>-2UD15-5AA1 0,55 10 3RV1021-1DA10 6SE6400-3CC00-2AD3 6SE6400-3TC00-4AD26SE6<strong>440</strong>-2UD17-5AA1 0,75 10 3RV1021-1FA10 6SE6400-3CC00-4AD3 6SE6400-3TC00-4AD26SE6<strong>440</strong>-2UD21-1AA1 1,1 10 3RV1021-1GA10 6SE6400-3CC00-4AD3 6SE6400-3TC00-4AD26SE6<strong>440</strong>-2UD21-5AA1 1,5 10 3RV1021-1JA10 6SE6400-3CC00-6AD3 6SE6400-3TC00-4AD26SE6<strong>440</strong>-2UD22-2BA1 2,2 16 3RV1021-1KA10 6SE6400-3CC01-0BD3 6SE6400-3TC01-0BD36SE6<strong>440</strong>-2UD23-0BA1 3,0 16 3RV1021-4AA10 6SE6400-3CC01-0BD3 6SE6400-3TC01-0BD36SE6<strong>440</strong>-2UD24-0BA1 4,0 20 3RV1021-4BA10 6SE6400-3CC01-4BD3 6SE6400-3TC01-0BD36SE6<strong>440</strong>-2UD25-5CA1 5,5 20 3RV1031-4EA10 6SE6400-3CC02-2CD3 6SE6400-3TC03-2CD36SE6<strong>440</strong>-2UD27-5CA1 7,5 32 3RV1031-4FA10 6SE6400-3CC02-2CD3 6SE6400-3TC03-2CD36SE6<strong>440</strong>-2UD31-1CA1 11 35 3RV1031-4HA10 6SE6400-3CC03-5CD3 6SE6400-3TC03-2CD36SE6<strong>440</strong>-2UD31-5DA1 15 50 3RV1042-4KA10 6SE6400-3CC04-4DD0 6SE6400-3TC03-8DD06SE6<strong>440</strong>-2UD31-8DA1 18,5 63 3RV1042-4KA10 6SE6400-3CC04-4DD0 6SE6400-3TC03-8DD06SE6<strong>440</strong>-2UD32-2DA1 22 80 3RV1042-4MA10 6SE6400-3CC05-2DD0 6SE6400-3TC05-4DD06SE6<strong>440</strong>-2UD33-0EA1 30 100 3VL1712-… 6SE6400-3CC08-3ED0 6SE6400-3TC07-5ED06SE6<strong>440</strong>-2UD33-7EA1 37 125 3VL1716-… 6SE6400-3CC08-3ED0 6SE6400-3TC08-0ED06SE6<strong>440</strong>-2UD34-5FA1 45 160 3VL3720-… 6SE6400-3CC11-2FD0 6SE6400-3TC14-5FD06SE6<strong>440</strong>-2UD35-5FA1 55 200 3VL3725-… 6SE6400-3CC11-2FD0 6SE6400-3TC14-5FD06SE6<strong>440</strong>-2UD37-5FA1 75 250 3VL4731-… 6SE6400-3CC11-7FD0 6SE6400-3TC15-4FD06SE6<strong>440</strong>-2UD38-8FA1 90 250 Erikseen kysyttäessä 6SL3000-0CE32-3AA0 Erikseen kysyttäessä6SE6<strong>440</strong>-2UD41-1FA1 110 315 Erikseen kysyttäessä 6SL3000-0CE32-8AA0 Erikseen kysyttäessä6SE6<strong>440</strong>-2UD41-3GA1 132 400 Erikseen kysyttäessä 6SL3000-0CE33-3AA0 Erikseen kysyttäessä6SE6<strong>440</strong>-2UD41-6GA1 160 450 Erikseen kysyttäessä 6SL3000-0CE35-1AA0 Erikseen kysyttäessä6SE6<strong>440</strong>-2UD42-0GA1 200 560 Erikseen kysyttäessä 6SL3000-0CE35-1AA0 Erikseen kysyttäessäTaulukko 1-5Sulakeet, johdonsuojat, verkko- ja lähtökuristintiedotMICROMASTER <strong>440</strong>Käyttöohje ja parametrit22 09/2005
1.7 Syöttö- ja moottorikaapelitTilausnumerokWSyöttökaapelinpoikkipinta-alamitta min. (mm 2 )Syöttökaapelinpoikkipinta-ala mittamax. (mm 2 )Moottorikaapelinpoikkipinta-alamitta min. (mm 2 )Moottorikaapelinpoikkipinta-alamitta max. (mm 2 )1-vaihe 230V6SE6<strong>440</strong>-2UC11-2AA1 0,12 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UC12-5AA1 0,25 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UC13-7AA1 0,37 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UC15-5AA1 0,55 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UC17-5AA1 0,75 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UC21-1BA1 1,1 2.5 6 1.5 66SE6<strong>440</strong>-2UC21-5BA1 1,5 2.5 6 1.5 66SE6<strong>440</strong>-2UC22-2BA1 2,2 4 6 1.5 66SE6<strong>440</strong>-2UC23-0CA1 3,0 6 10 1.5 10TilausnumerokWSyöttökaapelinpoikkipinta-alamitta min. (mm 2 )Syöttökaapelinpoikkipinta-alamitta max. (mm 2 )Moottorikaapelinpoikkipinta-alamitta min. (mm 2 )Moottorikaapelinpoikkipinta-alamitta max. (mm 2 )3-vaihe 400V6SE6<strong>440</strong>-2UD13-7AA1 0,37 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UD15-5AA1 0,55 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UD17-5AA1 0,75 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UD21-1AA1 1,1 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UD21-5AA1 1,5 1.5 2.5 1.5 2.56SE6<strong>440</strong>-2UD22-2BA1 2,2 1.5 6 1.5 66SE6<strong>440</strong>-2UD23-0BA1 3,0 1.5 6 1.5 66SE6<strong>440</strong>-2UD24-0BA1 4,0 2.5 6 1.5 66SE6<strong>440</strong>-2UD25-5CA1 5,5 2.5 10 2.5 106SE6<strong>440</strong>-2UD27-5CA1 7,5 4 10 4 106SE6<strong>440</strong>-2UD31-1CA1 11 6 10 6 106SE6<strong>440</strong>-2UD31-5DA1 15 10 35 10 356SE6<strong>440</strong>-2UD31-8DA1 18,5 10 35 10 356SE6<strong>440</strong>-2UD32-2DA1 22 16 35 16 356SE6<strong>440</strong>-2UD33-0EA1 30 25 35 25 356SE6<strong>440</strong>-2UD33-7EA1 37 25 35 25 356SE6<strong>440</strong>-2UD34-5FA1 45 35 150 35 1506SE6<strong>440</strong>-2UD35-5FA1 55 70 150 70 1506SE6<strong>440</strong>-2UD37-5FA1 75 70 150 70 1506SE6<strong>440</strong>-2UD38-8FA1 90 95 1x185 tai 2x120 95 1x185 tai 2x1206SE6<strong>440</strong>-2UD41-1FA1 110 120 1x185 tai 2x120 120 1x185 tai 2x1206SE6<strong>440</strong>-2UD41-3GA1 132 185 2x240 185 2x2406SE6<strong>440</strong>-2UD41-6GA1 160 2x95 2x240 2x95 2x2406SE6<strong>440</strong>-2UD42-0GA1 200 2x95 2x240 2x95 2x240Taulukko 1-6 KaapelimitatMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 23
1.8 Sähkömagneettisten häiriöiden (EMI) välttäminenSuoritettavat toimetTaajuusmuuttajat on suunniteltu toimimaan teollisuusympäristössä, jossa voi ollarunsaasti sähkömagneettisia häiriöitä. Hyvä asennustapa varmistaa tavallisestiturvallisen ja häiriöttömän toiminnan. Jos ongelmia esiintyy, noudata alla oleviaohjeita.‣ Varmista, että osaston kaikki laitteet on maadoitettu hyvin käyttämällä lyhyitä,paksuja maadoituskaapeleita, jotka on kytketty yhteiseen tähtipisteeseen.‣ Varmista, että jokainen taajuusmuuttajaan liitetty ohjauslaite (esimerkiksiohjelmoitava logiikka) on kytketty samaan maahan tai tähtipisteeseen kuintaajuusmuuttaja lyhyen, paksun yhteyden kautta.‣ Kytke moottoreilta tuleva maa suoraan maaliitäntään (PE) vastaavassataajuusmuuttajassa.‣ Litteät maajohtimet ovat suositeltavia, koska niiden impedanssi on muitapienempi suurilla taajuuksilla.‣ Päätä kaikkien kaapeleiden päät siististi varmistaen, että vaipaton kaapelipääjää mahdollisimman lyhyeksi.‣ Vedä ohjauskaapelit mahdollisimman erillään tehokaapeleista käyttäen erikaapelikouruja ja sijoita ne 90º kulmaan toisiinsa nähden mikäli johtojen onristettävä.‣ Aina kun mahdollista, käytä suojattuja johtoja ohjausjohdotuksissa ja maadoitavaippa molemmista päistä.‣ Varmista, että osaston kontaktorit on varustettu vaimennuspiirillä, joko RCsuotopiirivaihtovirtakontaktoreissa tai nolladiodi tasavirtakontaktoreissakytkettynä kelan yli. Myös varistorivaimentimet ovat tehokkaat. Tämä ontärkeää, kun kontaktoreita ohjataan taajuusmuuttajan releellä.‣ Käytä suojattuja tai suojavaipallisia kaapeleita moottoriliitännöissä ja maadoitasuojaus kummastakin päästä kaapeleiden kaapeli-/maadoituskiinnikkeidenavulla.VaaraTurvamääräyksissä ei saa tehdä kompromisseja, kun asennetaantaajuusmuuttajia!1.8.1 MaadoitustapaLaitekoot A, B ja CLaitekoot D, E ja FLaitekokoihin A, B ja C on saatavana lisävarusteena EMC-laippa. Tämämahdollistaa helpon ja tehokkaan yhteyden tarvittavan suojauksen valvontaan. Ks.EMC-laipan asennusohjeet (Gland Plate Installation Instructions), jotka sisältyvätMICROMASTER <strong>440</strong> -taajuusmuuttajan mukana tulevaan Dokumentointi CD-ROMiin.EMC-laippa on tehdasasennettu. Maadoituksen asennuksessa voi käyttää samojamenetelmiä kuin kokoluokissa A, B ja C.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit24 09/2005
Maadoitus ilman EMC-laippaaJos EMC-laippa ei ole saatavissa, taajuusmuuttajaa voidaan maadoittaa käyttäenKuva 2-6 esitettyä menetelmää.1175L1L2L32734623Kuva 2-6Johdotusohjeet sähkömagneettisten häiriöiden (EMI) vaikutusten minimoimiseksiKuvan numerot1 Verkkosyöttö2 Ohjauskaapeli3 Moottorikaapeli4 Suodin5 Metallinen takalevy6 Käytä sopivia liittimiä moottori- ja ohjauskaapelin suojavaipankiinnittämiseksi metalliseen takalevyyn7 MaadoituskaapeliHuom.Moottori- ja ohjauskaapeleiden maadoituksen parantamiseksi voidaan käyttäälisävarusteena saatava EMC-laippaa (ei näytetty kuva 2-6).MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 25
2. KäyttöönottoVaara♦ MICROMASTER-laitteet toimivat suurilla jännitteillä.♦ Sähkötoimisissa laitteissa ei voida estää vaarallisten jännitteiden syntymistälaitteen tiettyihin osiin.♦ Standardien EN 60204 IEC 204 (VDE 0113) mukaisten hätäpysäytyslaitteidenon pysyttävä toiminnassa taajuusmuuttajan kaikissa toimintamuodoissa.Hätäpysäytyslaitteen vapauttaminen ei saa johtaa siihen, että laitteistokäynnistyy uudelleen hallitsemattomasti.♦ Niissä tapauksissa, joissa ohjauslaitteiston mahdollinen vika voi aiheuttaahuomattavia esinevahinkoja tai jopa vakavan ruumiinvamman (so.potentiaaliseesti vaaralliset viat), turvallinen käyttö ja toiminta myösvikatapauksissa on varmistettava ylimääräisillä ulkoisilla varotoimilla (so.itsenäisesti toimivilla rajakytkimillä, mekaanisilla lukituksilla jne.).♦ Tietyillä parametriasetteluilla laite voi käynnistyä automaattisestiverkkokatkoksen jälkeen.♦ Moottoriparametrit on asetettava oikein moottorin ylikuormitusta varten, jottane toimisivat.♦ Laitteella pystytään järjestämään sisäinen moottorin ylikuormitussuojausstandardin UL508C kappaleen 42 mukaisesti. Ks. parametrit P0610 (taso 3)ja P0335, I 2 t on PÄÄLLÄ oletusarvona. Moottorin ylikuormitussuojaus voidaantoteuttaa myös käyttämällä ulkoista PTC-termistoria (oletusarvonapoiskytketty P0601).♦ Laite soveltuu käytettäväksi verkossa, joka pystyy syöttämään virtanaenintään 10kA (tehollisarvo), maksimijännitteellä 230V/460V/575V suojattunaH- tai K-tyyppisellä viivesulakkeella (ks. taulukko 1-5).♦ Laitetta ei saa käyttää hätäpysäytysmekanismina.VaroitusVain asianmukaisesti pätevöitynyt henkilö saa tehdä asetuksia ohjauspaneelilta.Turvaohjeisiin ja varoituksiin on kiinnitettävä erityistä huomiota koko ajan.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit26 09/2005
2.1 LohkokaavioKuva 2-7Taajuusmuuttajan lohkokaavioMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 27
2.2 KäyttöönottotilatMICROMASTER <strong>440</strong> -laitteen mukana tulee Tilanäyttöpaneeli (SDP)vakiovarusteena. Parametrien oletusarvot kattavat seuraavat asiat:‣ Moottorin jännite-, virta- ja taajuustiedot on syötetty muuttajaan, jotta voitaisiinvarmistaa moottorin yhteensopivuus taajuusmuuttajan kanssa. (Suositellaanvakio <strong>Siemens</strong>-moottoria).‣ Lineaarinen U/f -säätö, ohjattu analogisella potentiometrilla.‣ Maksiminopeus 3000 min -1 50 Hz:llä (3600 min-1 60 Hz:llä); ohjauspotentiometrilla taajuusmuuttajan analogitulojen kautta.‣ Kiihdytys-/ jarrutusaika = 10 s.Huom.Taajuuden asetus: DIP-kytkin löytyy ohjauspaneelilta, ohjauskortilla kuten alla,kuva 2-8. Taajuusmuuttaja toimitetaan seuraavin asetuksin:‣ DIP -kytkin 2:♦ Off-asento:eurooppalaisetoletusarvot (50 Hz,kW jne.)♦ On-asento:pohjoisamerikkalaisetoletusarvot(60 Hz, hv jne.)‣ DIP -kytkin 1:Ei asiakkaidenkäyttöön.Frequency SettingDIP SwitchesAnalog SettingDIP SwitchesKuva 2-8DIP -sijainnit I/O -paneelissa jaohjauspaneeli2.2.1 Palautus tehdasasetusten oletusarvoihinKaikkien parametrien palautusta tehdasasetuksien oletusarvoihin, seuraavatparametrit asetetaan seuraavasti (tarvitaan BOP, AOP tai tiedonsiirtomoduuli):Aseta P0010=30.B. Aseta P0970=1.Huom. Palautus voi kestää jopa kolme minuuttia.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit28 09/2005
MICROMASTER <strong>440</strong> -laitteiden etupaneelitMuuttajan parametrien muuttamiseksi tarvitaan jokin lisävarusteena toimitettavistaohjauspaneeleista, joko Peruskäyttöpaneeli (BOP) tai Tekstipaneeli (AOP). Apuaparametriarvojen nopeaan ja tehokkaaseen muuttamiseen saa käyttöönottoohjelmista,kuten DriveMonitor- ja Starter, jotka löytyvät Dokumentaatio CD:ltä.MICROMASTER <strong>440</strong> -taajuusmuuttajan käyttöpaneelitParametreja voidaan muuttaa myös käyttämällä yhtä (RS485)tiedonsiirtovaihtoehdoista. Lisätietoja voi katsoa Reference Manualista.Etupaneelien vaihdosta/korvaamisesta voi katsoa lisätietoja sopivasta liitteestätässä käyttöohjeessa.Huom.♦Liitinkaavio teho- ja ohjauskaapeleiden liittämistä varten on esitettyvalokuvassa tämän käyttöohjeen takakannen sisäpuolella.2.2.2 Käyttöönotto tilanäyttöpaneelin kanssa (SDP)Tilanäyttöpaneeli toimitetaan MICROMASTER <strong>440</strong> -taajuusmuuttajan mukana senvakiovarusteena. Tässä paneelissa on edessä kaksi valodiodia (LED), jotkailmoittavat taajuusmuuttajan käyttötilan.Tilanäyttöpaneelin kanssa taajuusmuuttajaa voidaankäyttää sen oletusasetuksilla, jotka riittävät moniinsovelluksiin. Oletusasetukset on esitetty taulukko 1-7.Liitinkaavio näkyy ohjausliitännän esitettävässävalokuvassa tämän käyttöohjeen takakannen sisäpuolella.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 29
Varoitukset ja häiriötilat tilanäyttöpaneelillaTilanäyttöpaneelin kaksi valodiodia kertovat taajuusmuuttajasi käyttötilan. Nämävalodiodit ilmoittavat myös eri varoitukset ja häiriötilat.Keltainen Vihreä Taajuusmuuttajakäytön tilaOFF OFF Laite ei saa verkkojännitettäOFF ON Taajuusmuuttajan häiriö – muu kuin alla lueteltuON OFF Taajuusmuuttaja käynnissäON ON Valmis käynnistykseen – standbyOFF vilkkuu -R1 Häiriö - ylivirtavilkkuu -R1 OFF Häiriö - ylijännitevilkkuu -R1 ON Häiriö - moottorin ylilämpöON vilkkuu -R1 Häiriö - taajuusmuutt. ylilämpövilkkuu –R1 vilkkuu -R1 Varoitus: virtaraja - LEDit vilkkuvat samassa tahdissavilkkuu -R1 vilkkuu -R1 Muu varoitus - LEDit vilkkuvat vuorotahtiavilkkuu -R1 vilkkuu -R2 Alijännitehäiriötila/Alijännitevaroitusvilkkuu -R2 vilkkuu -R1 Taajuusmuuttaja ei ole valmiina – näyttö >0vilkkuu –R2 vilkkuu –R2 ROM-vika - LEDit vilkkuvat samassa tahdissavilkkuu –R2 vilkkuu –R2 RAM-vika- LEDit vilkkuvat vuorotahtiaR1 = 900msR2 = 300msTaulukko 1-7 Oletusasetukset tilanäyttöpaneelin kanssaLiitin Parametri OletustoimintoDigitaalitulo 1 5 P0701 = ‘1’ Käyntiin, eteenDigitaalitulo 2 6 P0702 = ‘12’ SuunnanvaihtoDigitaalitulo 3 7 P0703 = ‘9’ Häiriön kuittausDigitaalitulo 4 8 P0704 = ‘15’ Kiinteä taajuus 4Digitaalitulo 5 16 P0705 = ‘15’ Kiinteä taajuus 5Digitaalitulo 6 17 P0706 = ‘15’ Kiinteä taajuus 6Digitaalitulo 7 AIN1 kautta P0707 = ‘0’ Vapaasti ohjelmoitavissaDigitaalitulo 8 AIN2 kautta P0708 = ‘0’ Vapaasti ohjelmoitavissaMICROMASTER <strong>440</strong>Käyttöohje ja parametrit30 09/2005
2.2.3 Peruskäyttö Tilanäyttöpaneelin kanssaTilanäyttöpaneelin kanssa mahdollista on seuraava:‣ Moottorin käynnistäminen ja pysäyttäminen (DIN1 ulkoisen kytkimen kautta)‣ Moottorin pyörimissuunnan vaihtaminen (DIN2 ulkoisen kytkimen kautta)‣ Häiriöiden kuittaus (DIN3 ulkoisen kytkimen kautta)Kuva 2-9Peruskäyttö Tilanäyttöpaneelin kanssaMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 31
2.2.4 Yleiskatsaus käyttöönotosta Peruskäyttö- tai TekstipaneelinkanssaEdellytykset:Mekaaninen ja elektroninen asennus päättynyt .Moottorin taajuuden asettaminenDIP -kytkin 2: Off = 50 Hz / ON = 60 HzVerkkosyöttöPÄÄLLEPikakäyttöönotto P0010 = 1Ks. kappale 2.2.5Laajennettu käyttöönotto P0003 ja P0004 kauttaYksityiskohtaisempi kuvaus parametreistä löytyyParametrit-osiostaHuom.Suosittelemme käyttöönottoa tämän mallin mukaisesti. Asiantuntijakäyttäjä voidaankuitenkin suorittaa käyttöönoton ilman parametrin P0004 suodatintoimintoja.2.2.5 Pikakäyttöönotto (P0010=1)On tärkeää, että parametri P0010 käytetään käyttöönottoon ja parametri P0003käytetään näytettävien parametrien määrän valitsemiseen. Tämä parametrimahdollistaa parametriryhmän valinnan, joka mahdollistaa nopean käyttöönoton.Tähän sisältyvät sellaiset parametrit kuin moottoriasetukset ja ramppiasetukset.Pikakäyttöönottosarjan lopussa pitäisi valita P3900, joka ollessaan arvossa 1suorittaa tarvittavat moottorimallilaskennat ja palauttaa kaikki muut parametrit(jotka eivät sisälly P0010=1) oletusarvoihinsa. Tämä tapahtuu vainPikakäyttöönottotilassa.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit32 09/2005
Pikakäyttöönoton kaavio (P0003=3)P0010 Aloita pikakäyttöönotto0 Valmis käynnistykseen1 Pikakäyttöönotto30 TehdasasetusHuom!Parametrille P0010 on palautettava arvo '0' ennenkäynnistystä. Kuitenkin automaattinen palautus josP3900 = 1 on asetettu käyttöönoton jälkeen.P0100 Käyttö Eurooppa/P. Amerikka0 Teho kW:ssa ; f oletus 50 Hz1 Teho hv:ssa ; f oletus 60 Hz2 Teho kW:ssa ; f oletus 60 HzHuom!Arvot 0 & 1 muutetaan DIP-kytkimien avulla, jottaarvoista tulee pysyvät.P0304 Moottorin nimellisjännite1)10 V - 2000 VMoottorin nimellisjännite (V) selviää arvokilvestä.P0305 Moottorin nimellisvirta1)0 - 2 x muuttajan nimellisvirta (A)Moottorin nimellisvirta (A) selviää arvokilvestäP0700 Komentolähteen valinta2)(on / off / reverse)0 Tehdasasetus1 Peruskäyttöpaneeli2 DigitaalitulotP1000 Taajuusohjearvon valinta2)0 Ei taajuusohjearvoa1 Peruskäyttöpaneelin taajuussäätö ↑↓2 Analoginen ohjearvoP1080 MiniminitaajuusAsettaa moottorin minimitaajuuden (0-650Hz), jonkakohdalla moottori käy huolimatta siitä mikätaajuusohjearvo on. Tässä asetettu arvo koskeesekä myötäpäivä- että vastapäiväkierroksia.P1082 Maksimitaajuus 3)Asettaa moottorin maksimitaajuuden (0-650Hz),jonka kohdalla moottori käy huolimatta siitä mitätaajuusohjearvo on . Tässä asetettu arvo koskeesekä myötäpäivä- että vastapäiväkierroksia.P0307 Moottorin nimellisteho1)0 kW - 2000 kWMoottorin nimellisteho (kW) arvokilvestä.Kun P0100 = 1, arvot näytetään hv:ssa.P1120 Kiihdytysaika0 s - 650 sMoottorin vaatima aika kiihdyttääkseenpysähdyksistä maksimitaajuuteen.P0308 Moottorin cosφ1)0 - 1Moottorin cosφ selviää arvokilvestä.P1121 Jarrutusaika0 s - 650 sMoottorin vaatima aika jarruttaakseenmaksimitaajuudesta pysähdyksiin.P0310 Moottorin nimellistaajuus1)12 Hz - 650 HzMoottorin nimellistaajuus (Hz) arvokilvestä.P0311 Moottorin pyörimisnopeus1)0 - 40000 1/minMoottorin pyörimisnopeus (rpm) arvokilvestä.P3900 Pikakäyttöönoton lopetus0 Lopeta pikakäyttöönotto ilmanmoottorilaskentaa tai tehdasasetusta.1 Lopeta pikakäyttöönotto moottorilaskennalla jatehdasasetusten palauttamisella (suositus).2 Lopeta pikakäyttöönotto moottorilaskennalla jaI/O palautuksella.3 Lopeta pikakäyttöönotto moottorilaskennalla,mutta ilman I/O palautusta.1) Moottoriin liittyviä parametrejä – katso moottorin arvokilven kuvaa.2) Tarkoittaa parametrejä, jotka sisältävät listoja tarkemmista mahdollisista asetuksista, joita voidaankäyttää tietyissä ohjelmistoissa. Katso Reference Manualia ja Käyttöohje (Operating Instructions)CD-ROMilta.3) Jos maksimitaajuus nostetaan yli 50Hz on myös referenssitaajuus (P2000=50) muutettavavastaavasti.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 33
2.2.6 Käyttöönotto Peruskäyttöpaneelin kanssa (BOP)Peruskäyttöpaneeli (BOP) mahdollistaa parametrienmuuttamisen ja täten MICROMASTER <strong>440</strong> -laitteesiasetusten räätälöinnin. Peruskäyttöpaneelilla voidaanparametroida useampia MICROMASTER <strong>440</strong> -taajuusmuuttajia. Tämä onnistuu siten, ettäPeruskäyttöpaneelilla asetetaan tarvittavat parametrit ja kunprosessi on valmis Peruskäyttöpaneelia voidaan korvataTilanäyttöpaneelilla.Peruskäyttöpaneelissa on viisimerkkinen näyttö, jokaantaa käyttäjän lukea tulo- ja lähtöominaisuudet jokaiselleparametrille. Peruskäyttöpaneeli ei pysty tallentamaanparametritietoja omaan muistiinsa. Parametrit tallentuvattaajuusmuuttajan omaan muistiin (EEPROM).Huom.♦ Peruskäyttöpaneelin moottorinohjaustoiminnot ovat oletuksena kytketty pois.Jotta moottoria pystyisi ohjaamaan Peruskäyttöpaneelin kanssa,parametreille P0700 ja P1000 pitää asettaa arvo 1.♦ Peruskäyttöpaneelin voi irrottaa ja asentaa myös virran ollessa päällä.♦ Jos Peruskäyttöpaneelia on asetettu painonappiohjaukseen (P0700 = 1),käyttö pysähtyy, jos paneelin poistaa.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit34 09/2005
Peruskäyttöpaneelin painikkeetPaneeli/nappi Toiminto VaikutusIlmoittaa tilanKäynnistysPysäytysVaihdapyörimissuuntaMoottorinryömintänopeusToiminnotParametriasetuksetLCD-näyttö esittää taajuusmuuttajan sillä hetkellävalitun oloarvon.Napin painaminen käynnistää taajuusmuuttajan.Oletusarvona nappi on estetty. Aktivoi nappiasettamalla P0700 = 1.OFF1 Napin painaminen pysäyttää taajuusmuuttajanvalitulla jarrutusnopeudella. Oletusarvona estetty,aktivoi asettamalla P0700 = 1.OFF2 Napin painaminen kahdesti (tai kerran pitkään)aiheuttaa moottorin hidastumisen vapaastiseisahduksiin.Tämä toiminto on aina aktivoituna.Painamalla tätä nappia, moottorin pyörimissuuntavaihtuu. Taakse pyöriminen ilmoitetaan miinusmerkillä(-) tai vilkkuvalla desimaalipisteellä. Oletusarvonaestetty, aktivoi painamalla P0700 = 1.Napin painaminen, kun taajuusmuuttaja on käynnissä,saa moottorin käynnistymään ja käymään ennaltaasetetulla ryömintänopeudella. Taajuusmuuttajapysähtyy, kun nappia vapautetaan. Napinpainamisella ei ole vaikutustataajuusmuuttajan/moottorin käydessä.Tätä nappia voidaan käyttää lisätietojen saamiseksitai häirökuittaukseen.Painamalla nappia ja pitämällä sen alhaalla 2sekunnin ajan, näytöllä näkyy seuraavat:1. Välipiirijännite (V).2. Lähtövirta. (A)3. Lähtötaajuus (Hz)4. Lähtöjännite (ilmoitetaan o-arvo V).5. Parametrissä P0005 valittu arvo. (Jos P0005 onasetettu näyttämään joku yllä mainituista (3, 4 tai5) tätä ei näytetä uudelleen).Lisäpainalluksilla pääsee muuttamaan näitä.OhitustoimintoMistä tahansa parametristä (rXXXX tai PXXXX) Fnnapinlyhyt painallus hyppää parametriin r0000, jonkajälkeen voit muuttaa toisen parametrin halutessasi.Palaamalla r0000:aan, Fn-napin painaminen palauttaaasetukset lähtöpisteeseen.Painamalla tätä nappia pääset muuttamaanparametriasetuksia.Suurenna arvoPainamalla nappia näytön arvo kasvaa.Pienennä arvoPainamalla nappia näytön arvo pienenee.Kuva 2-10Peruskäyttöpaneelin painikkeetMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 35
Parametrien muuttaminen Peruskäyttöpaneelin kanssaSeuraava katsaus kertoo, kuinka parametrejä muutetaan. Käytä tätä katsaustaohjeena muuttaessasi mitä tahansa parametriä Peruskäyttöpaneelilla.Parametrin P0004 muuttaminen – parametrien suodatintoimintoVaiheTulos näytöllä1 Paina päästäksesi parametreihin2 Paina kunnes näytöllä on P00043 Paina päästäksesi parametrin arvoon4 Paina tai asettaaksesi haluttu arvo5 Paina tallentaaksesi arvon6Ainoastaan moottorin parametrit näkyvätkäyttäjälle.Indeksoidun parametrin P1082 muuttaminen –moottorin maksimitaajuudenasettaminenVaiheTulos näytöllä1 Paina päästäksesi parametreihin2 Paina kunnes näytöllä on P10823Paina päästäksesi parametrin arvoon(datasetti 0)4 Paina jolloin näytetään tämänhetkistä arvoa5 Paina tai asettaaksesi haluttu arvo6 Paina tallentaaksesi arvon7 Paina kunnes näytöllä on r00008Painapalauttaaksesi näytön oletusajonäyttöön (asiakkaan määrittelemä)Kuva 2-11 Parametrien muuttaminen PeruskäyttöpaneelillaHuom. Kiireestä kertova viestiJoissakin tilanteissa kun ollaan muuttumassa parametrejä, Peruskäyttöpaneelinnäytöllä näkyy:tai ”Busy”.Tämä tarkoittaa sitä, että taajuusmuuttaja suorittaa parhaillaan jotain tärkeämpäätehtävää.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit36 09/2005
Yksittäisten merkkien muuttaminen parametrien arvoissaJotta parametrin arvon muuttaminen olisi nopeampi, yksittäiset merkit näytöllävoidaan muuttaa seuraavalla tavalla:Tarkista, että olet parametrien arvojen muuttamistasolla (ks. "Parametrienmuuttaminen Peruskäyttöpaneelilla").1. Paina (toimintonappi) jolloin oikeanpuolimmainen merkki alkaa vilkkua.2. Muuta tämän merkin arvo painamalla / .3. Paina (toimintonappi) uudelleen, jolloin seuraava merkki alkaa vilkkua.4. Toista 2 – 4 kunnes haluttu arvo on saavutettu.5. Paina jättääksesi parametriarvojen muuttamistaso.Huom.Toimintanappia voi käyttää myös virheilmoituksen kuittaamiseen.Moottoritiedot parametrointia vartenP0308 P0310 P03043_MotIEC 56IM B3Nr. ED510 3053IP54 Rot KL 1612.022I.CI.F50 Hz 230/400V0.61 0.35 A60 Hz <strong>440</strong>V Y0.34A0.14 kWCos j0.81 0.12kWCos j0.8165%2800 / minS.F. -- 1.153310 /minP0309 P0305 P0311 P0307Kuva 2-12Esimerkki tyypillisestä moottorin arvokilvestäHuom.‣ P0308 & P0309 näkyvät vain, jos P0003 ≥ 2. Vain yksi parametreistänäytetään parametrin P0100 asetuksesta riippuen.‣ P0307 osoittaa HV riippuen P0100 asetuksesta. Saadaksesi lisätietoja ks.Parametrilistaa.‣ Moottoriparametrien muuttaminen ei ole mahdollista, ellei P0010=1.‣ Varmista, että taajuusmuuttaja on konfiguroitu oikein moottoria varten, so. ylläolevassa esimerkissä kolmiokytkentäliittimet ovat jännitteelle 230 V.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 37
Ulkoinen moottorin ylilämpösuojausKun moottoria käytetään alle nimellisnopeudella, moottorin tuuletussiipienjäähdytysteho pienenee. Tästä syystä moottorin kuormitusta on pienennettäväjatkuvassa käytössä pienillä taajuuksilla. Jotta moottori olisi suojattuylikuumenemista vastaan näissä oloissa, varmista, että PTC/KTY-anturi onasennettu moottoriin ja kytketty taajuusmuuttajan ohjausliittimiin ja että parametrillaP0601 on valittu PTC/KTY-anturi.2.2.7 Käyttöönotto Tekstipaneelin kanssa (AOP)Tekstipaneeli (AOP) on lisävaruste. Senasiantuntijaominaisuuksiin sisältyvät mm.:‣ Tekstinäyttö eri kielillä‣ Useiden parametrisarjojen lataus laitteeseen jalaitteesta‣ Kyky ajaa jopa 30 taajuusmuuttajaaLisätietoja saa Tekstipaneelin käyttöohjeesta tai <strong>Siemens</strong>Osakeyhtiöstä.2.3 Käyttö yleisestiVakio- ja laajennusparametrien täydellinen kuvaus: katso Järjestelmäparametrit.Yleistä1. Taajuusmuuttajassa ei ole pääkytkintä ja se on jännitteellinen kunverkkosyöttö on kytketty. Tällöin se jää odottamaan estotilassa, kunnes RUN-nappia painetaan tai kunnes digitaalinen ON-signaali vaikuttaa liittimessä 5(pyöriminen oikealle).2. Jos laitteeseen on asennettu Peruskäyttöpaneeli (BOP) tai Tekstipaneeli(AOP) ja lähtötaajuus on valittu näytettäväksi (P0005 = 21) , vastaavaohjearvo näytetään noin 1.0 sekunnin välein kun taajuusmuuttaja onpysäytetty.3. Taajuusmuuttaja on ohjelmoitu tehtaalla käytettäväksi <strong>Siemens</strong>in 4-napaistenvakiomoottoreiden kanssa, joilla on sama tehoarvo kuin taajuusmuuttajalla.Kun käytetään muuta moottoria, sen arvot on syötettävä moottorin arvokilventietojen perusteella. Katso Kuva 2-12 tarkemmin miten moottoritiedot luetaan.4. Moottoriparametrien muuttaminen ei ole mahdollista, ellei P0010 = 1.5. Parametrille P0010 on palautettava arvo 0, jotta taajuusmuuttaja käynnistyisi.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit38 09/2005
3. Johdatus MICROMASTER <strong>440</strong> parametreihinParametrikuvaus on jäsennelty seuraavasti:1 Par numero 2 Parametrin nimi 9 Min:[indeksi] 3 Tila: 5 Tietotyyppi 7 Yksikkö: 10 Oletus:4 P-Ryhmä: 6 Aktiivinen: 8 Pikakäyttöönotto 11 Maks:12 Taso:213 Kuvaus:1. Parametrin numeroOsoittaa parametrin numeron. Käytössä olevat numerot ovat 4-merkkisiä 0000 –9999. Numerot, joilla on etumerkintä “r” ilmaisevat lukuparametriä (read-only),joka näyttää tiettyä arvoa, mutta jota ei voida muuttaa suoraan asettamalla tälleparametrille toinen arvo (siinä tapauksessa väliviiva “-“ -merkki näytetään“Yksikkö”, “Min”, “Oletus” ja “Maks” -kohdissa parametrikuvauksen otsikossa.Kaikilla muilla parametreillä on etumerkintä “P”. Näiden parametrien arvo voidaanmuuttaa suoraan otsikoiden “Min” ja “Maks” -rajojen sisällä.[indeksi] ilmaisee, että parametri on indeksoitu ja määrittää indeksien määrän.2. Parametrin nimiOsoittaa kyseisen parametrin nimen. Joidenkin parametrien nimet sisältävätseuraavat lyhennetyt etuliitteet: BI, BO, CI ja CO, joita seuraa kaksoispiste.Lyhenteet tarkoittavat:BI = Binektoritulo (binector input), eli parametri valitsee binäärisignaalinlähteenBO = Binektorilähtö (binector output), eli parametri kytkeytyybinäärisignaalinaCI = Konnektoritulo (connector input), eli parametri valitseeanalogisignaalin lähteenCO = Konnektorilähtö (connector output), parametri kytkeytyyanalogisignaalinaCO/BO = Konnektori-/binektorilähtö, eli parametri kytkeytyy analogisenasignaalina ja/tai binäärisignaalinaJotta voisit käyttää BiCo-teknologiaa, sinulla täytyy olla käytössäsi kokoparametrilista, joka mahdollistaa monta uutta parametriasetusta, mukaan lukienBiCo-teknologia. Se on erilainen, joustavampi tapa asettaa ja yhdistää tulo- jalähtötoiminnot. Sitä voidaan useimmissa tapauksissa käyttää yksinkertaistenTaso 2 -asetusten kanssa.BiCo-järjestelmä sallii yhdistelmätoimintojen asettamista. Boolen ja matemaattisetsuhteet voidaan asettaa tulojen (digitaalinen, analoginen, sarja jne.) ja lähtöjen(taajuusmuuttajan virta, taajuus, analogilähtö, releet jne.).3. TilaParametrin käyttöönottotila. Kolme mahdollista tilaa:KäyttöönottoCValmis käynnistykseen UKäyTNämä ilmaisevat milloin parametria voidaan muuttaa. On mahdollista määrittääyhtä, kahta tai kaikkia kolmea tilaa. Jos kaikki kolme tilaa on määritetty setarkoittaa, että parametrin arvo voidaan muuttaa taajuusmuuttajan kaikissakolmessa tilassa.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 39
4. P-RyhmäIlmoittaa kyseisen parametrin toiminnallisen ryhmän.Huom.Parametri P0004 (parametrisuodin) toimii eräänlaisena suotimena ja keskittääpääsy parametreihin määritettyjen toiminnallisten ryhmien mukaan.5. TietotyyppiSaatavilla olevat tietotyypit on esitetty alla olevassa taulukossa.EsitysmuotoTarkoitusU16U32I16I32Liukuva6. Aktiivinen16-bit etumerkitön32-bit etumerkitön16-bit kokonaisluku32-bit kokonaislukuLiukuva piste♦ Heti (immediately) Tarkoittaa, että muutokset parametrin asetuksiinastuvat voimaan heti (immediately) muutoksenjälkeen.♦ Vahvista (confirm) “P”-nappia käyttöpaneelilla (BOP tai AOP) onpainettava ennen kuin muutokset astuvat voimaan.7. YksikköIlmaisee mitä yksikköä voidaan käyttää parametrien arvoissa.8. PikakäynnistysIlmaisee, että parametria voidaan muuttaa ainoastaan pikakäyttöönoton aikana, elikun parametrille P0010 (käyttöönoton parametriryhmät) on asetettu arvo 1(pikakäyttöönotto).9. MinOsoittaa parametrille asetettavan minimiarvon.10. OletusIlmaisee tehdasasetusarvon, eli mitä arvoa käytetään jos käyttäjä ei määritteleparametrille ominaisarvoa.11. MaksOsoittaa parametrille asetettavan maksimiarvon.12. TasoOsoittaa käyttäjän käsittelytason, joita on neljä: Normaali, Laajennettu,Asiantuntija ja Huolto. Toiminnallisissa ryhmissä näkyvien parametrien määräriippuu käsittelytasosta, jota on asetettu parametrissä P0003 (käyttäjänkäsittelytaso).13. KuvausParametrikuvaus koostuu alla listatuista kappaleista ja sisällöstä. Jotkut näistäparametreistä ovat valinnanvaraisia ja niiden sisällyttäminen katsotaantapauskohtaisesti.Kuvaus:Kaavio:Asetukset:Esimerkit:Riippuvuussuhde:Lyhyt kuvaus parametrin toiminnasta.Kaavio, joka osoittaa parametrin vaikutus esim. ominaiskäyrällä.Lista mahdollisista asetuksista, joihin sisältyvätMahdolliset asetukset, Yleisimmät asetukset, Indeksi ja Bittikentät.Valinnainen esimerkki parametrin määritellystä asetusten vaikutuksesta.Kaikki parametrin yhteydessä täytettävät vaatimukset, mukaan lukien erityisetvaikutukset, jotka tämä parametri aiheuttaa muissa parametreissä tai muidenparametrien mahdolliset vaikutukset kyseiseen parametriin.Varoitus / Ilmoitus/ Huom.:Tärkeä tieto henkilövaurioiden tai laitteiden vaurioiden välttämiseksi / tietoongelmien välttämiseksi / käyttäjälle hyödyllinen tieto.Lisätiedot: Mistä saa lisätietoja kyseisestä parametristä.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit40 09/2005
3.1 Pikakäyttöönotto (P0010=1)Pikakäyttöönottoa (P0010=1) varten vaaditaan seuraavat parametrit:Nro Nimi Käsittelytaso TilaP0100 Eurooppa / Pohjois-Amerikka 1 CP0205 Taajuusmuuttajan käyttösovellus 3 CP0300 Moottorityypin valinta 2 CP0304 Moottorin nimellisjännite 1 CP0305 Moottorin nimellisvirta 1 CP0307 Moottorin nimellisteho 1 CP0308 Moottorin nimellinen cosφ 2 CP0309 Moottorin nimellinen hyötysuhde 2 CP0310 Moottorin nimellistaajuus 1 CP0311 Moottorin nimelliskierrosluku 1 CP0320 (* Moottorin magnetointivirta 3 CTP0335 Moottorin jäähdytys 2 CTP0640 Moottorin ylikuormituskerroin [%] 2 CUTP0700 Komentolähteen valinta 1 CTP1000 Taajuusohjearvon valinta 1 CTP1080 Miniminopeus 1 CUTP1082 Maksiminopeus 1 CTP1120 Kiihdytysaika 1 CUTP1121 Jarrutusaika 1 CUTP1135 OFF3 Jarrutusaika 2 CUTP1300 Ohjaustapa 2 CTP1500 (* Momentin ohjearvon valinta 2 CTP1910 Moottoritietojen tunnistus 2 CTP3900 Pikakäyttöönoton lopetus 1 CKun P0010 = 1 on valittu, parametriä P0003 (käyttäjän käsittelytaso) voidaan käyttääohjelmoitavien parametrien valintaan. Tämä parametri mahdollistaa myös käyttäjänmäärittämän parametrilistan valinnan pikakäyttöönottoa varten.Pikakäyttöönottosekvenssin jälkeen aseta P3900 = 1, jolloin tarvittavatmoottorilaskelmat suoritetaan ja kaikki muut parametrit (jotka eivät sisälly parametriinP0010 = 1) palautetaan oletusarvoihinsa.Huom.Tämä pätee ainoastaan Pikakäyttöönotto-tilassa.(* Sovelluksesta riippuen, ei tarvitse normaalisti muuttaa.Palautus tehdasasetuksiinKaikki parametrit saadaan palautetuksi tehdasasetuksen mukaisiin oletusarvoihinseuraavasti:Aseta P0010 = 30.Aseta P0970 = 1.Huom.Tehdasasetusten palautus kestää noin 30 sekuntia.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 41
Seitsenosainen näyttöSeitsenosaisen näytön rakenne on seuraavanlainen:Segment Bit15 1413 1211 109 8Segment Bit7 65 43 21 0Kyseisten bittien merkitykset kuvataan tila- ja ohjaussana-parametreissä.(Esim. r0052 – r0056, P0927)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit42 09/2005
3.2 ParametrikatsausHuom.Tason 4 parametrit eivät näy kun käytössä on Peruskäyttöpaneeli (BOP) tai Tekstipaneeli (AOP).r0000 Taajuusmuuttajan näyttö Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: AINA Maks: -Taso:1Näyttää käyttäjän määrittämän lähdön kuten asetettu parametrissä P0005.Huom.Painamalla "Fn"-nappia 2 sekuntia pääsee katsomaan välipiirijännitteen, lähtövirran, lähtötaajuuden,lähtöjännitteen ja r0000-asetusten arvot (määritelty parametrissä P0005).r0002 Taajuusmuuttajan tila Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KOMENNOT Maks: -Taso:2Näyttää taajuusmuuttajan senhetkisen tilan.Mahdolliset arvot:0 “Käyttöönottomuoto (P0010 ≠ 0)”1 “Valmis Käy-tilaan (RUN)“2 “Häiriö“3 “Käynnistymässä – välipiirin esilataus“4 “Käy“5 “Pysäytys – jarrutus käynnissä“Huom.Tila 3 voidaan nähdä vain välipiirin esilatauksen aikana ja kun ulkoisella jännitelähteellä varustettutietoliikennekortti on asetettu.P0003 Käyttäjän käsittelytaso Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 1P-ryhmä: AINA Voimassa: Vahvista - Maks: 4Taso:1Määrittää käyttäjien käsittelytasot eri parametrisarjoille. Useimmissa yksinkertaisissa sovelluksissa riittääoletusarvo (tehdasasetus).Mahdolliset arvot:0 “Käyttäjän määrittelemä parametriluettelo – ks. käytön yksityiskohdat: P0013 (taso 3).“1 “Normaali:“ Sallii tavallisimmin käytettyjen parametrien käsittelyn.2 “Laajennettu:“ Sallii taajuusmuuttajan I/O-toimintojen laajennetun käsittelyn.3 “Asiantuntija:“ Vain asiantuntijoille.4 “Huolto:“ Tarkoitettu vain valtuutetun huoltohenkilöstön käyttöön – salasanasuojaus.P0004 Parametrisuodin Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: AINA Voimassa: Vahvista - Maks: 22Suodattaa käytettävissä olevat parametrit toiminnan perusteella niin, että tarkennettukäyttöönottoparametrointi on mahdollinen.Esimerkki:Asettamalla P0004 = 22, vain PID-parametrit saadaan näkyviin.Mahdolliset arvot:0 "Kaikki parametrit"2 "Taajuusmuuttaja"3 "Moottori"4 "Nopeusanturi"5 "Teknologinen sovellus / yksiköt"7 "Komennot ja binäärinen I/O"8 "AD- ja DA- muuntimet"10 "Ohjearvokanava / ohjearvointegraattori"12 "Käytön ominaisuudet"13 "Moottorin säätö"20 "Tietoliikenne"21 "Hälytykset / varoitukset / valvonta"22 "Teknologiasäädin" (esim. PID)Riippuvuus:"Vain käyttöönoton yhteydessä" -parametrit voidaan asettaa vain silloin kun P0010 = 1 (Pikakäyttöönotto).Huom.Taajuusmuuttaja voidaan käynnistää riippumatta parametrin P0004 asetuksesta.Taso:1MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 43
P0005[3] Näytön valinta Min: 2Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 21P-ryhmä: TOIM Voimassa: Vahvista - Maks: 4000Valitsee parametrissä r0000 (taajuusmuuttajan näyttö) esitettävät arvot.Asetukset:21 Taajuusoloarvo25 Lähtöjännite26 Välipiirijännite27 LähtövirtaIndeksi:P0005[0] : 1. Laiteparametridatasarja (DDS)P0005[1] : 2. Laiteparametridatasarja (DDS)P0005[2] : 3. Laiteparametridatasarja (DDS)Huom.Nämä asetukset koskevat vain lukuparametrejä ("rxxxx").Lisätiedot:Ks. kyseisen "rxxxx" parametrin kuvausta.P0010 Parametriryhmät käyttöönottoa varten Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: AINA Voimassa: Vahvista - Maks: 30Taso:2Taso:1Tämä asetus mahdollistaa parametrien suodatuksen niin, että valitaan vain tiettyyn ryhmään liittyvättoiminnot alla olevan luettelon mukaisesti.Mahdolliset arvot:0 Valmis käynnistykseen1 Pikakäyttöönotto2 Taajuusmuuttaja29 Parametrilataus30 TehdasasetusRiippuvuus:Parametrille on palautettava arvo 0 ennen kuin taajuusmuuttaja voidaan käynnistää.Käsiteltävissä oleviin parametreihin vaikuttaa myös käyttäjän käsittelytaso (P0003).Huom.Jos P3900 ≠ 0 (0 on oletusarvo), tämä parametri palautuu automaattisesti arvoon 0.P0011 Lukko käyttäjän määrittelemille parametreille Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TOIM Voimassa: Vahvista - Maks: 65535Lisätiedot:Ks. Parametri P0013 (Käyttäjän määrittelemät parametrit)P0012 Avain käyttäjän määrittelemille parametreille Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TOIM Voimassa: Vahvista - Maks: 65535Lisätiedot:Ks. Parametri P0013 (Käyttäjän määrittelemät parametrit)P0013[20] Käyttäjän määrittelemät parametrit Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TOIM Voimassa: Vahvista - Maks: 65535Taso:3Taso:3Taso:3Määrittää käyttäjän haluaman määrän parametreja.Ohjeet käytölle:1. Aseta P0003=3 (asiantuntija)2. Mene P0013 indekseihin 0 – 163. Määriettele P0013 indekseihin 0 – 16 halutut parametrit.Seuraavat indeksit on ennalta määritelty, eikä niitä voida muuttaa:- P0013 indeksi 19 = 12 (avain käyttäjän määrittelemille parametreille)- P0013 indeksi 18 = 10 (parametriryhmät käyttöönottoa varten)- P0013 indeksi 17 = 3 (käyttäjän käsittelytaso)4. Asettelemalla P0003=0 käyttäjän määrittelemät parametrit aktivoituvatIndeksi:P0013[0] : 1. käyttäjän parametriP0013[1] : 2. käyttäjän parametri…P0013[19]: 20. käyttäjän parametriRiippuvuus:Aseta ensin P0011 (”lukko”) eri arvoon kuin P0012 (”avain”) estääksesi määriteltyjen parametrienmuuttamisen. Tämän jälkeen aktivoi parametrilista asettelemalla P0003=0.Huom.- Tehdasasetusten palautus onnistuu asettelemalla P0010=30 ja P0970=1- Tehdasasetusarvot P0011 (”lukko”) ja P0012 (”avain”) ovat samat.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit44 09/2005
0018 Ohjelmiston versio Min: -Tietotyyppi: Liukuva Yksikkö: - Oletus: -P-ryhmä: TAAJ.MUUT. Maks: -Näyttää laitteen ohjelmiston versionumeron.r0020 CO: Todellinen taajuusohjearvo Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää todellisen taajuusohjearvon (ohjearvointegraattorin lähtö).r0021 CO: Taajuusoloarvo Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää taajuusmuuttajan lähdön taajuusoloarvon (r0024) lukuun ottamatta jättämäkompensaatiota,resonanssivaimennusta ja taajuusrajoitusta.r0022 Todellinen roottorinopeus Min: -Tietotyyppi: Liukuva Yksikkö: 1/min Oletus: -P-ryhmä: OHJAUS Maks: -Taso:1Taso:3Taso:2Taso:3Näyttää lasketun roottorinopeuden taajuusmuuttajan lähtötaajuuden perusteella [Hz] x 120 / napojen määrä.Huom.Tämä laskelma ei huomioi kuormituksesta aiheutuvia jättämiä.r0024 CO: Todellinen lähtötaajuus Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää todellisen lähtötaajuuden (ottaen huomioon jättämäkompensaation, resonanssivaimennuksen jataajuusrajoituksen).r0025 CO: Todellinen lähtöjännite Min: -Tietotyyppi: Liukuva Yksikkö: V Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää [rms] moottoriin kohdistetun jännitteen.Taso:3Taso:2r0026 CO: Todellinen välipiirijännite Min: -Tietotyyppi: Liukuva Yksikkö: V Oletus: -P-ryhmä: TAAJ.MUUT. Maks: -Taso:2Näyttää välipiirijännitteen.U DC_max_tripF0002Mains200 - 240 V 380 - 480 V 500 - 600 V420 V (FS A - C)410 V (FS D - F)U DC_min_tripF0003 215 VU DC_max_warnA0502(P1240)U DC_max_ctrl840 V (FS A - C)820 V (FS D - F)820 V (FS FX, GX)430 V (FS A - F)380 V (FS FX, GX)r12421020 V530 VU DC_min_warnA0503(P1240)U DC_min_ctrlP1245 [%]100⋅2 ⋅P0210U DC_Comp(P1236)U DC_Chopper(P1237)0.98 ⋅r12420.98 ⋅r1242r0027 CO: Todellinen lähtövirta Min: -Tietotyyppi: Liukuva Yksikkö: A Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää [rms] moottorivirran arvon [A].r0031 CO: Todellinen momentti Min: -Tietotyyppi: Liukuva Yksikkö: Nm Oletus: -P-ryhmä: OHJAUS Maks: -Taso:2Taso:2Näyttää moottorimomentin.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 45
0032 CO: Todellinen teho Min: -Tietotyyppi: Liukuva Yksikkö: - Oletus: -P-ryhmä: OHJAUS Maks: -Taso:2Näyttää moottorin tehon.Riippuvuus:Näytetään [kW] tai [hv], riippuen parametrin P0100 arvosta (käyttö Euroopassa / Pohjois-Amerikassa).r0035[3] CO: Moottorin lämpötila Min: -Tietotyyppi: Liukuva Yksikkö: °C Oletus: -P-ryhmä: MOOTTORI Maks: -Taso:2Näyttää moottorin mitatun lämpötilan.r0052 CO/BO: Voimassa oleva tilasana 1 Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KOMENNOT Maks: -Taso:2Parametri näyttää taajuusmuuttajan ensimmäisen voimassa olevan tilasanan (bittimuodossa) ja senperusteella voidaan diagnostisoida taajuusmuuttajan tilaa. Tilasananäytön segmenttien kuvaus annetaanparametrin kuvauksen johdannossa ja se voidaan tulkita seuraavasti:Bittikentät:Bitti 00 Taajuusmuuttaja valmistilassa 0 EI1 KYLLÄBitti 01 Taajuusmuuttaja valmis käynnistettäväksi 0 EI1 KYLLÄBitti 02 Taajuusmuuttaja käynnissä 0 EI1 KYLLÄBitti 03 Taajuusmuuttaja häiriötilassa 0 EI1 KYLLÄBitti 04 OFF2 voimassa 0 KYLLÄ1 EIBitti 05 OFF3 voimassa 0 KYLLÄ1 EIBitti 06 Päällekytkentäesto päällä 0 EI1 KYLLÄBitti 07 Taajuusmuuttajakäytön varoitus voimassa 0 EI1 KYLLÄBitti 08 Ohjearvon ja oloarvon poikkeama 0 KYLLÄ1 EIBitti 09 PZD-ohjaus (prosessidataohjaus) 0 EI1 KYLLÄBitti 10 Maksimitaajuus saavutettu 0 EI1 KYLLÄBitti 11 Varoitus: Moottorin ylikuormituskerroin 0 KYLLÄ1 EIBitti 12 Moottorin pitojarru päällä 0 EI1 KYLLÄBitti 13 Moottorin ylikuormitus 0 KYLLÄ1 EIBitti 14 Moottorin pyörimissuunta oikealle 0 EI1 KYLLÄBitti 15 Taajuusmuuttajan ylikuormitus 0 KYLLÄ1 EIHuom.Bitin 3 (häiriö) lähtö invertoidaan digitaaliähdössä (Low = häiriö, High = Ei häiriötä).MICROMASTER <strong>440</strong>Käyttöohje ja parametrit46 09/2005
0053 CO/BO: Voimassa oleva tilasana 2 Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KOMENNOT Maks: -Näyttää taajuusmuuttajan toisen tilasanan (bittimuodossa).Bittikentät:Bitti 00 Tasavirtajarru aktivoitu 0 EI1 KYLLÄBitti 01 Taajuusoloarvo r0024 > P2167 0 EI1 KYLLÄBitti 02 Taajuusoloarvo r0024 > P1080 0 EI1 KYLLÄBitti 03 Tod. virta r0027 ≥ P2170 0 EI1 KYLLÄBitti 04 Taajuusoloarvo r0024 > P2155 0 EI1 KYLLÄBitti 05 Taajuusoloarvo r0024 ≤ P2155 0 EI1 KYLLÄBitti 06 Taajuusoloarvo r0024 ≥ ohjearvo 0 EI1 KYLLÄBitti 07 Tod. Udc r0026 < P2172 0 EI1 KYLLÄBitti 08 Tod. Udc r0026 > P2172 0 EI1 KYLLÄBitti 09 Ramppaus valmis 0 EI1 KYLLÄBitti 10 PID-lähtö r2294 < P2291 0 EI1 KYLLÄBitti 11 PID-lähtö r2294 ≥ P2291 0 EI1 KYLLÄBitti 14 Datasarjan 0 lataus Tekstipaneelista 0 EI1 KYLLÄBitti 15 Datasarjan 1 lataus Tekstipaneelista 0 EI1 KYLLÄLisätiedot:Ks. seitsenosaisen näytön kuvaus johdannossa.r0054 CO/BO: Voimassa oleva ohjaussana 1 Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KOMENNOT Maks: -Taso:2Taso:3Näyttää taajuusmuuttajan ensimmäisen ohjaussanan, jota voidaan käyttää voimassa olevien komentojendiagnostisoinnissa.Bittikentät:Bitti 00 ON/OFF1 0 EI1 KYLLÄBitti 01 OFF2: Välitön pysäytys 0 KYLLÄ1 EIBitti 02 OFF3: Nopea pysäytys 0 KYLLÄ1 EIBitti 03 Pulssi vapautettu 0 EI1 KYLLÄBitti 04 Ramppigeneraattori päällä 0 EI1 KYLLÄBitti 05 Ramppigeneraattori aktivoitu 0 EI1 KYLLÄBitti 06 Ohjearvo aktivoitu 0 EI1 KYLLÄBitti 07 Häiriön kuittaus 0 EI1 KYLLÄBitti 08 Ryömintä oikealle 0 EI1 KYLLÄBitti 09 Ryömintä vasemmalle 0 EI1 KYLLÄBitti 10 Ohjaus PLC:stä 0 EI1 KYLLÄBitti 11 Suunnanvaihto (ohjearvon inversio) 0 EI1 KYLLÄBitti 13 Moottorin potentiometri (MOP) ylös 0 EI1 KYLLÄBitti 14 Moottorin potentiometri (MOP) alas 0 EI1 KYLLÄBitti 15 Ohjausparametridatasarja (CDS) Bitti 0 0 EI(paikallis-/kauko-) 1 KYLLÄLisätiedot:Ks. seitsenosaisen näytön kuvaus johdannossa.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 47
0055 CO/BO: Toinen voimassa oleva ohjaussana Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KOMENNOT Maks: -Näyttää taajuusmuuttajan toisen ohjaussanan, jota voidaan käyttää voimassa olevien komentojendiagnostisoinnissa.Bittikentät:Bitti 00 Kiinteä taajuus Bitti 0 0 EI1 KYLLÄBitti 01 Kiinteä taajuus Bitti 1 0 EI1 KYLLÄBitti 02 Kiinteä taajuus Bitti 2 0 EI1 KYLLÄBitti 03 Kiinteä taajuus Bitti 3 0 EI1 KYLLÄBitti 04 Laiteparametridatasarja (DDS) Bitti 0 0 EI1 KYLLÄBitti 05 Laiteparametridatasarja (DDS) Bitti 1 0 EI1 KYLLÄBitti 08 PID päällä 0 EI1 KYLLÄBitti 09 Tasavirtajarru päällä 0 EI1 KYLLÄBitti 11 Kuormituspoikkeama(Droop= 0 EI1 KYLLÄBitti 12 Momenttiohjaus 0 EI1 KYLLÄBitti 13 Ulkoinen häiriö 1 0 KYLLÄ1 EIBitti 15 Ohjausparametridatasarja (CDS) Bitti 1 0 EI1 KYLLÄLisätiedot:Ks. seitsenosaisen näytön kuvaus johdannossa.r0061 CO: Todellinen roottorinopeus Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää anturin mittaaman nopeuden (todellinen arvo).r0062 CO: Taajuusohjearvo Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää vektorisäätimen nopeusohjearvon.r0063 CO: Todellinen taajuus Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää todellisen nopeuden.r0064 CO: Nopeussäätimen poikkeama Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Taso:3Taso:2Taso:3Taso:3Taso:3Näyttää nopeussäätimen todellisen poikkeaman(olo- ja ohjearvon ero).Tämä arvo lasketaan nopeusohjearvon (r0062) ja todellisen nopeuden (r0063) perusteella.Riippuvuus:Käytössä silloin kun vektorisäätö on valittu parametrissä P1300 (ohjaustapa); muuten näytetään arvo 0.r0066 CO: Todellinen lähtötaajuus Min: -Tietotyyppi: Liukuva Yksikkö: Hz Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää todellisen lähtötaajuuden.Huom.:Lähtötaajuus on rajoitettu parametreissä P1080 (minimitaajuus) ja P1082 (maksimitaajuus) asetettujenarvojen mukaan.r0072 CO: Todellinen lähtöjännite Min: -Tietotyyppi: Liukuva Yksikkö: V Oletus: -P-ryhmä: OHJAUS Maks: -Näyttää lähtöjännitteen.Taso:3Taso:3MICROMASTER <strong>440</strong>Käyttöohje ja parametrit48 09/2005
P0100 Eurooppa / Pohjois-Amerikka Min: 0Tila: C Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: PIKA Voimassa: Vahvista Pikakäyttöönotto Maks: 2Taso:1Määrittää annetaanko tehoasetukset (esim. arvokilven nimellisteho - P0307) yksikössä [kW] vai [hv].Moottorin nimellistaajuuden oletusasetus (P0310) ja moottorin maksimitaajuuden (P1082) oletusasetusasetetaan myös automaattisesti tässä vertailutaajuuden (P2000) lisäksi.Mahdolliset arvot:0 Eurooppa [kW], taajuusoletus 50 Hz1 Pohjois-Amerikka [hv], taajuusoletus 60 Hz2 Pohjois-Amerikka [kW], taajuusoletus 60 HzRiippuvuus:Käyttöpaneelin alla oleva DIP-kytkin 2 määrittää asetusten 0 ja 1 voimassaolon parametrille P0100 allaolevan taulukon mukaisesti:DIP 2 TarkoitusP0100 TarkoitusasetusasetusPOIS [kW], taajuusoletus 50 [Hz] ohittaa 1 [hp], taajuusoletus 60 [Hz]PÄÄLLÄ [hp], taajuusoletus 60 [Hz] ohittaa 0 [kW], taajuusoletus 50 [Hz]Pysäytä taajuusmuuttaja (estä kaikki pulssit) ennen kuin muutat tätä parametriä.P0010= 1 (Käyttöönottotila) mahdollistaa muutokset.Muuttamalla P0100 kaikki moottorin nimellistiedot palautuvat tehdasasetuksiin, kuten myös muut parametrit,jotka ovat riippuvaisia moottorin nimellistiedoista (ks. P0340 – moottoriparametrien laskenta).Huom.P0100 asetus 2 (==> [kW], taajuusoletus 60 [Hz]) ei voida ohittaa asettamalla DIP-kytkintä 2 (ks. yllä olevaataulukkoa).r0200 Taajuusmuuttajatyyppi Min: -Tietotyyppi: U32 Yksikkö: - Oletus: -P-ryhmä: TAAJ.MUUT. Maks: -Taso:3Tunnistaa laitetyypin alla esitetyn mukaan:Nro MLFB41 6SE6<strong>440</strong>-2UC11-2AA142 6SE6<strong>440</strong>-2UC12-5AA143 6SE6<strong>440</strong>-2UC13-7AA144 6SE6<strong>440</strong>-2UC15-5AA145 6SE6<strong>440</strong>-2UC17-5AA146 6SE6<strong>440</strong>-2AB11-2AA147 6SE6<strong>440</strong>-2AB12-5AA148 6SE6<strong>440</strong>-2AB13-7AA149 6SE6<strong>440</strong>-2AB15-5AA150 6SE6<strong>440</strong>-2AB17-5AA151 6SE6<strong>440</strong>-2UC21-1BA152 6SE6<strong>440</strong>-2UC21-5BA153 6SE6<strong>440</strong>-2UC22-2BA154 6SE6<strong>440</strong>-2AB21-1BA155 6SE6<strong>440</strong>-2AB21-5BA156 6SE6<strong>440</strong>-2AB22-2BA157 6SE6<strong>440</strong>-2UC23-0CA158 6SE6<strong>440</strong>-2UC24-0CA159 6SE6<strong>440</strong>-2UC25-5CA160 6SE6<strong>440</strong>-2AB23-0CA180 6SE6<strong>440</strong>-2UD13-7AA181 6SE6<strong>440</strong>-2UD15-5AA182 6SE6<strong>440</strong>-2UD17-5AA183 6SE6<strong>440</strong>-2UD21-1AA184 6SE6<strong>440</strong>-2UD21-5AA1Nro MLFB85 6SE6<strong>440</strong>-2UD22-2BA186 6SE6<strong>440</strong>-2UD23-0BA187 6SE6<strong>440</strong>-2UD24-0BA188 6SE6<strong>440</strong>-2AD22-2BA189 6SE6<strong>440</strong>-2AD23-0BA190 6SE6<strong>440</strong>-2AD24-0BA191 6SE6<strong>440</strong>-2UD25-5CA192 6SE6<strong>440</strong>-2UD27-5CA193 6SE6<strong>440</strong>-2UD31-1CA194 6SE6<strong>440</strong>-2AD25-5CA195 6SE6<strong>440</strong>-2AD27-5CA196 6SE6<strong>440</strong>-2AD31-1CA197 6SE6<strong>440</strong>-2UD31-5DA198 6SE6<strong>440</strong>-2UD31-8DA199 6SE6<strong>440</strong>-2UD32-2DA1100 6SE6<strong>440</strong>-2AD31-5DA1101 6SE6<strong>440</strong>-2AD31-8DA1102 6SE6<strong>440</strong>-2AD32-2DA1103 6SE6<strong>440</strong>-2UD33-0EA1104 6SE6<strong>440</strong>-2UD33-7EA1105 6SE6<strong>440</strong>-2AD33-0EA1106 6SE6<strong>440</strong>-2AD33-7EA1107 6SE6<strong>440</strong>-2UD34-5FA1108 6SE6<strong>440</strong>-2UD35-5FA1109 6SE6<strong>440</strong>-2UD37-5FA1Nro MLFB110 6SE6<strong>440</strong>-2AD34-5FA1111 6SE6<strong>440</strong>-2AD35-5FA1112 6SE6<strong>440</strong>-2AD37-5FA1113 6SE6<strong>440</strong>-2UE17-5CA1114 6SE6<strong>440</strong>-2UE21-5CA1115 6SE6<strong>440</strong>-2UE22-2CA1116 6SE6<strong>440</strong>-2UE24-0CA1117 6SE6<strong>440</strong>-2UE25-5CA1118 6SE6<strong>440</strong>-2UE27-5CA1119 6SE6<strong>440</strong>-2UE31-1CA1120 6SE6<strong>440</strong>-2UE31-5DA1121 6SE6<strong>440</strong>-2UE31-8DA1122 6SE6<strong>440</strong>-2UE32-2DA1123 6SE6<strong>440</strong>-2UE33-0EA1124 6SE6<strong>440</strong>-2UE33-7EA1125 6SE6<strong>440</strong>-2UE34-5FA1126 6SE6<strong>440</strong>-2UE35-5FA1127 6SE6<strong>440</strong>-2UE37-5FA11001 6SE6<strong>440</strong>-2UD38-8FA11002 6SE6<strong>440</strong>-2UD41-1FA11003 6SE6<strong>440</strong>-2UD41-3GA11004 6SE6<strong>440</strong>-2UD41-6GA11005 6SE6<strong>440</strong>-2UD42-0GA1Huom.Parametri r0200 = 0 osoittaa, että mitään tyyppiä ei ole tunnistettu.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005 49
P0205 Taajuusmuuttajan käyttösovellus Min: 0Tila: C Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TAAJ.MUUT. Voimassa: Vahvista Pikakäyttöönotto Maks: 1Taso:3Valitsee taajuusmuuttajan ohjelmiston.Vakiomomentti (CT):Vakiomomenttia (CT) käytetään jos ohjelmisto tarvitsee vakiomomentin koko taajuusalueella.Neliöllinen momentti (VT):Neliöllistä momenttia (VT) käytetään jos kuorman vastamomentti on neliöllinen, kuten pumppu- japuhallinkäytöissäNeliöllinen momentti samassa taajuusmuuttajassa:* Taajuusmuuttajan suurempi nimellisvirta r0207* Taajuusmuuttajan suurempi nimellisteho r0206* Korkeampi I2t-suojan varoitustasoJos P0205 muutetaan Pikakäyttöönotto-tilassa, se laskee heti useat moottoriparametrit1. Moottorin nimellisvirta P0305 (Taso 2)2. Moottorin nimellisteho P0307 (Taso 2)3. Moottorin ylikuormituskerroin P0640 (Taso 2)4. Ohjaustapa P1300 (Taso 2)Suositellaan, että parametri P0205 muutetaan ensin, jonka jälkeen moottoriparametria voidaan soveltaa.Moottoriparametria ohitetaan muuttamalla tätä sarjaa.Mahdolliset arvot:0 Vakiomomentti1 Neliöllinen momenttiHuom.Parametriarvo ei palaudu tehdasasetuksessa (ks. P970).Asetus P0205 = 1 (neliöllinen momentti) ei ole mahdollinen kaikissa taajuusmuuttajissa.Huom.Käytä asetusta 1 (neliöllinen momentti) ainoastaan pumppu- ja puhallinkäytöille. Vakiomomentin käytössäI2t-varoitus tulee liian myöhään, aiheuttaen ylilämpöä moottorissa.P0210 Syöttöjännite Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: V Oletus: 230P-ryhmä: TAAJ.MUUT. Voimassa: Heti - Maks: 1000Optimoi Udc-säätimen, mikä pidentää jarrutusaikaa, jos moottorista saatu regeneroitava energia muutenaiheuttaisi välipiiriylijännitehälytyksen.Arvon alentaminen mahdollistaa alhaisemman aktivointitason ja vähentää ylijännitteen vaaraa.Riippuvuus:Aseta P1254 ("Automaattinen Udc kytkentätasojen havaitseminen") = 0. Aktivointitasot Udc-säätimelle jayhdistelmäjarrutukselle on silloin laskettu suoraan parametristä P0210 (syöttöjännite).Huom.Vdc_min aktivointiraja = P1245 x VerkkoVdc_max aktivointiraja = 1.15 x sqrt(2) x VerkkoYhdistelmäjarru(compound) aktivointiraja = 1.13 x sqrt(2) x VerkkoJarrukatkojan aktivointiraja = 1.13 x sqrt(2) x VerkkoJos verkon jännite on suurempi kuin syötetty arvo, Udc-säätimen automaattinen deaktivointi voi esiintyämoottorin kiihdytyksen estämiseksi missä tapauksessa annetaan hälytys (A0910).P0290 Taajuusmuuttajan ylikuormitusreaktio Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 2P-ryhmä: TAAJ.MUUT. Voimassa: Vahvista - Maks: 3Valitsee taajuusmuuttajan reaktion sisäiseen ylilämpöön.Mahdolliset arvot:0 Pienentää lähtötaajuuden (toimii yleensä vain pumppu- ja puhallinkäytöissä)1 Ylilämpöhälytys (F0004)2 Vähentää kytkentätaajuuden ja lähtötaajuuden3 Vähentää ensin kytkentätaajuuden, sitten ylilämpöhälytyksen (F0004)Huom.Alijännitehälytys sattuu aina siinä tapauksessa kun suoritettu toimenpide ei vähennä sisäistä lämpötilaariittävästi.Kytkentätaajuus vähennetään yleensä vain, jos se on korkeampi kuin 2 kHz.Taso:3Taso:350MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0295 Taajuusmuuttajan tuulettimen pysäytysviive Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: s Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 3600Taso:3Määrittää taajuusmuuttajan tuulettimen pysäyttämisviiveen sekunneissa laitteen pysäyttämisen jälkeen.Huom.Kun asetetaan arvo 0, taajuusmuuttajan tuuletin kytkeytyy pois kun laite pysähtyy ilman viivettä.P0300[3] Moottorityypin valinta Min: 1Tila: C Tietotyyppi: U16 Yksikkö: - Oletus: 1P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 2Valitsee moottorin tyypin.Tätä parametria tarvitaan käyttöönoton aikana moottorityypin valitsemiseksi ja taajuusmuuttajansuorituskyvyn optimoimiseksi. Useimmat moottorit ovat asynkronimoottoreita, mutta jos et ole varmamoottorin tyypistä, voit käyttää alla olevaa kaavaa:(moottorin nimellistaajuus (P0310) * 60) / moottorin nimelliskierrosluku(P0311)Jos saat tulokseksi kokonaisluvun, moottori on synkronimoottori.Mahdolliset arvot:1 Asynkroninen moottori2 Synkroninen moottoriIndeksi:P0300[0] : 1. Laiteparametridatasarja (DDS)P0300[1] : 2. Laiteparametridatasarja (DDS)P0300[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).Jos valitset synkronimoottorin, seuraavat toiminnot eivät ole käytettävissä:Tehokerroin (P0308)Moottorin hyötysuhde (P0309)Magnetointiaika (P0346 (taso 3)Demagnetointiaika (P0347 (taso 3)Vauhtikäynnistys (P1200, P1202 (taso 3), P1203 (taso 3))Tasavirtajarrutus (P1230 (taso 3), P1232, P1233)Jättämäkompensaatio (P1335)Jättämäraja (P1336)Moottorin magnetointivirta (P0320 (taso 3),Nimellinen jättämä (P0330),Nimellismagnetointivirta (P0331),Nimellistehokerroin (P0332),Roottorin aikavakio (P0384)Taso:2MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200551
P0304[3] Moottorin nimellisjännite Min: 10Tila: C Tietotyyppi: U16 Yksikkö: V Oletus: 230P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 2000Taso:1Moottorin nimellisjännite [V] moottorin arvokilvestä. Alla olevasta kuvasta näet, mistä löydät moottoritiedot.P0310P0305P03043~Mot1LA7130-4AA10EN 60034No UD 0013509-0090-0031 TICI F 1325 IP 55 IM B350 Hz230-400 V60 Hz460 VP03075.5kW19.7/11.A6.5kW10.9 ACos ϕ 0.811455/minCos ϕ 0.821755/min∆/Υ 220-240/380-420 V19.7-20.6/11.4-11.9AΥ <strong>440</strong>-48095.75%11.1-11.3 A 45kgP0308P0311P0309Indeksi:P0304[0] : 1. Laiteparametridatasarja (DDS)P0304[1] : 2. Laiteparametridatasarja (DDS)P0304[2] : 3. Laiteparametridatasarja (DDS)Huom.Tätä parametriä voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).P0305[3] Moottorin nimellisvirta Min: 0.01Tila: C Tietotyyppi: Liukuva Yksikkö: A Oletus: 3.25P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 10000.00Taso:1Moottorin nimellisvirta [A] arvokilvestä – ks. kaaviota parametrin P0304 kohdalla.Indeksi:P0305[0] : 1. Laiteparametridatasarja (DDS)P0305[1] : 2. Laiteparametridatasarja (DDS)P0305[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Tätä parametriä voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).Tämä parametri on myös riippuvainen parametristä P0320 (moottorin magnetointivirta).Huom.Asynkronimoottoreille maksimiarvoksi määritellään taajuusmuuttajan maksimi nimellisvirta (r0209).Synkronimoottoreille maksimiarvoksi määritellään 2* taajuusmuuttajan nimellisvirta (r0209)Minimiarvoksi määritellään 1/32 taajuusmuuttajan nimellisvirrasta (r0207).P0307[3] Moottorin nimellisteho Min: 0.01Tila: C Tietotyyppi: Liukuva Yksikkö: - Oletus: 0.12P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 2000.00Taso:1Moottorin nimellisteho [kW/hv] arvokilvestä.Indeksi:P0307[0] : 1. Laiteparametridatasarja (DDS)P0307[1] : 2. Laiteparametridatasarja (DDS)P0307[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Jos P0100 = 1 ([kW], taajuusoletus 50 Hz), arvo on yksikössä [hv] – ks. kaavio parametrin P0304 (arvokilpi)kohdalla.Tätä parametriä voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).52MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0308[3] Moottorin nimellinen cosφ Min: 0.000Tila: C Tietotyyppi: Liukuva Yksikkö: - Oletus: 0.000P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 1.000Taso:2Moottorin nimellinen tehokerroin (cosφ) arvokilvestä – ks. kaavio parametrin P0304 kohdalla.Indeksi:P0308[0] : 1. Laiteparametridatasarja (DDS)P0308[1] : 2. Laiteparametridatasarja (DDS)P0308[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Tätä parametriä voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).Tämä parametri saadaan näkyviin vain silloin, kun P0100 = 0 tai 2, (Moottorin teho annettu yksikössä [kW]).Jos asetetaan 0, arvo lasketaan sisäisesti (ks. r0332).P0309[3] Moottorin nimellinen hyötysuhde Min: 0.0Tila: C Tietotyyppi: Liukuva Yksikkö: % Oletus: 0.0P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 99.9Taso:2Moottorin nimellinen hyötysuhde prosenteissa [%] arvokilvestä.Indeksi:P0309[0] : 1. Laiteparametridatasarja (DDS)P0309[1] : 2. Laiteparametridatasarja (DDS)P0309[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Tätä parametriä voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).Tämä parametri saadaan näkyviin vain silloin, kun parametri P0100 = 1, (so. Moottorin teho annettuyksikössä [hv]).Jos asetetaan 0, arvo lasketaan sisäisesti (ks. r0332).Huom.P0309 = 100 % vastaa suprajohtavaa.Lisätiedot:Ks. kaavio parametrin P0304 (arvokilpi) kohdalla.P0310[3] Moottorin nimellistaajuus Min: 12.00Tila: C Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 50.00P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 650.00Taso:1Moottorin nimellistaajuus [Hz] arvokilvestä.Indeksi:P0310[0] : 1. Laiteparametridatasarja (DDS)P0310[1] : 2. Laiteparametridatasarja (DDS)P0310[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Tätä parametriä voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).Napaparien numero lasketaan automaattisesti uudestaan kun tätä parametriä muutetaan.Lisätiedot:Ks. kaavio parametrin P0304 (arvokilpi) kohdalla.P0311[3] Moottorin nimelliskierrosluku Min: 0Tila: C Tietotyyppi: U16 Yksikkö: 1/min Oletus: 0P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 40000Taso:1Moottorin nimelliskierrosluku [rpm] arvokilvestä.Indeksi:P0311[0] : 1. Laiteparametridatasarja (DDS)P0311[1] : 2. Laiteparametridatasarja (DDS)P0311[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Tätä parametriä voidaan muuttaa vain silloin, kun P0010 = 1 (pikakäyttöönotto).Jos asetetaan 0, arvo lasketaan sisäisesti (ks. r0332=moottorin tehokerroin).Vaaditaan vektorisäätöön ja nopeussäätimellä tapahtuvaan U/f-säätöön.U/f-säädön jättämäkompensaatio vaatii toimiakseen, että moottorin nimelliskierrosluku on täysin oikein.Napaparien numero lasketaan automaattisesti uudestaan kun tätä parametriä muutetaan.Lisätiedot:Ks. kaavio parametrin P0304 (arvokilpi) kohdalla.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200553
P0320[3] Moottorin magnetointivirta Min: 0.0Tila: CT Tietotyyppi: Liukuva Yksikkö: % Oletus: 0.0P-ryhmä: MOOTTORI Voimassa: Heti Pikakäyttöönotto Maks: 99.0Taso:3Määrittää moottorin magnetointivirran prosentteina [%] suhteessa parametriin P0305 (moottorinnimellisvirta).Indeksi:P0320[0] : 1. Laiteparametridatasarja (DDS)P0320[1] : 2. Laiteparametridatasarja (DDS)P0320[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Tähän parametriin vaikuttaa parametrit P0366 – P0369 (magnetointikäyrän imag. 1 – 4). Jos asetetaanarvoksi 0, arvo lasketaan joko parametrin P0340 = 1 (arvokilpi) tai parametrin P3900 = 1 tai 2(pikakäyttöönoton lopetus) mukaan.r0331[3] Moottorin nimellismagnetointivirta Min: -Tietotyyppi: Liukuva Yksikkö: A Oletus: -P-ryhmä: MOOTTORI Maks: -Taso:3Näyttää moottorin lasketun magnetointivirran yksikössä A.Indeksi:r0331[0] : 1. Laiteparametridatasarja (DDS)r0331[1] : 2. Laiteparametridatasarja (DDS)r0331[2] : 3. Laiteparametridatasarja (DDS)P0335[3] Moottorin jäähdytys Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 3Taso:2Määrittää käytössä olevan moottorin jäähdytysjärjestelmän.Mahdolliset arvot:0 Itsejäähdytteinen: Käyttää moottorin akseliin kiinnitettyä tuuletinta.1 Erillistuuletus: Käyttää erillisellä tehonsyötöllä varustettua puhallinta.2 Itsejäähdytteinen ja sisäinen tuuletin3 Erillistuuletus ja sisäinen tuuletinIndeksi:P0335[0] : 1. Laiteparametridatasarja (DDS)P0335[1] : 2. Laiteparametridatasarja (DDS)P0335[2] : 3. Laiteparametridatasarja (DDS)Ilmoitus:Moottoreilla, jotka kuuluvat sarjoihin 1LA1 ja 1LA8, on sisäinen tuuletin. Tätä moottorin sisäistä tuuletinta eisaa sekoittaa siihen tuulettimeen, joka on kiinnitetty moottorin akseliin.P0340[3] Moottoriparametrien laskenta Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: MOOTTORI Voimassa: Vahvista - Maks: 4Laskee eri moottoriparametrejä, mukaan lukien:Moottorin paino P0344 (taso 3)Magnetointiaika P0346 (taso 3)Demagnetointiaika P0347 (taso 3)Staattorivastus P0350 (taso 2)Vertailutaajuus P2000 (taso 2)Vertailuvirta P2002 (taso 3).Mahdolliset arvot:0 Ei lasketa1 Täydellinen parametrointi2 Laskee vastaavat piiritiedot3 U/f- ja vektorisäädön laskenta4 Vain säätimen asetusten laskentaIndeksi:P0340[0] : 1. Laiteparametridatasarja (DDS)P0340[1] : 2. Laiteparametridatasarja (DDS)P0340[2] : 3. Laiteparametridatasarja (DDS)Huom.Tämä parametri tarvitaan käyttöönoton yhteydessä taajuusmuuttajan suorituskyvyn optimoimiseksi.Moottoriparametrien laskenta suoritetaan automaattisesti pikakäyttöönoton päättämiseksi (P3900=1-3).Taso:254MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0341[3] Moottorin inertia [kg*m 2 ] Min: 0.00010Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 0.00180P-ryhmä: MOOTTORI Voimassa: Heti - Maks: 1000.0Taso:3Asettaa moottorin hitausmomentin.Yhdessä parametrien P0342 (kuorman+moottorin/moottorin hitaussuhdemomentti) ja P1496 (kiihdytyksenskaalausarvo) kanssa, tämä arvo tuottaa kiihdytysmomentin (r1517), jota voidaan lisätä mihin tahansalisämomenttiin joka on tuotettu BiCo-lähteestä (P1511) ja sisällyttää momenttisäätöön.Indeksi:P0341[0] : 1. Laiteparametridatasarja (DDS)P0341[1] : 2. Laiteparametridatasarja (DDS)P0341[2] : 3. Laiteparametridatasarja (DDS)Huom.P0341 * P0342 (kuorman+moottorin/moottorin hitaussuhdemomentti)tulos = moottorin yhteenlaskettu inertia joka sisällytetään nopeussäätimen laskentaan.P1496 (kiihdytyksen skaalausarvo) = 100 % aktivoi nopeussäätimen kiihdytyksen esisäädön ja momentinparametreistä P0341 (moottorin inertia) ja P0342 (kuorman+moottorin/moottorin hitaussuhdemomentti).P0346[3] Magnetointiaika Min: 0.000Tila: CUT Tietotyyppi: Liukuva Yksikkö: s Oletus: 1.000P-ryhmä: MOOTTORI Voimassa: Heti - Maks: 20.000Määrää magnetointiajan sekunneissa [s], so. odotusaika pulssin vapautuksen ja moottorin kiihdytyksenalkamisen välillä. Moottorin magnetointi lisääntyy tämän aikana.Magnetointiaika lasketaan tavallisesti automaattisesti moottoritiedoista ja vastaa roottorin aikavakiota(r0384).Indeksi:P0346[0] : 1. Laiteparametridatasarja (DDS)P0346[1] : 2. Laiteparametridatasarja (DDS)P0346[2] : 3. Laiteparametridatasarja (DDS)Huom.Jos jännitteenlisäyksen asetukset ovat asetettu korkeammalle kuin 100 %, tämä seikka voi heikentäämagnetointia.Ilmoitus:Magnetointiajan liiallinen vähentäminen voi johtaa moottorin riittämättömään magnetointiin.P0347[3] Demagnetointiaika Min: 0.000Tila: CUT Tietotyyppi: Liukuva Yksikkö: s Oletus: 1.000P-ryhmä: MOOTTORI Voimassa: Heti - Maks: 20.000Muuttaa OFF2 / häiriötilan jälkeen sallitun ajan, ennen kuin pulssit voidaan vapauttaa.Indeksi:P0347[0] : 1. Laiteparametridatasarja (DDS)P0347[1] : 2. Laiteparametridatasarja (DDS)P0347[2] : 3. Laiteparametridatasarja (DDS)Huom.Demagnetointiaika on suunnilleen 2.5 x roottorin aikavakio (r0384) sekunneissa.Ilmoitus:Ei aktivoidu ongelmitta suoritetun jarrutuksen jälkeen, kuten OFF1, OFF3 tai ryöminnän jälkeen.Taso:3Taso:3Ylivirtahälytyksiä esiintyy jos aika vähennetään huomattavasti.P0350[3] Staattorivastus (vaiheiden välinen) Min: 0.00001Tila: CUT Tietotyyppi: Liukuva Yksikkö: Ohm Oletus: 4.0P-ryhmä: MOOTTORI Voimassa: Heti - Maks: 2000.0Taso:2Staattorivastuksen arvo [Ohms] kytketylle moottorille (vaiheiden välinen). Parametrin arvo sisältääkaapelivastuksen.Parametrin arvo voidaan määrittää kolmella tavalla:1. Laskea asettamalla P0340 = 1 (tieto arvokilvestä) taiP3900 = 1,2 tai 3 (pikakäyttöönoton lopetus)2. Mitata asettamalla P1910 = 1 (moottoritietojen tunnistus – käämivastuksen arvo päällekirjoitetaan)3. Mitata vastusmittarin avulla.Indeksi:P0350[0] : 1. Laiteparametridatasarja (DDS)P0350[1] : 2. Laiteparametridatasarja (DDS)P0350[2] : 3. Laiteparametridatasarja (DDS)Huom.Koska tämä arvo on mitattu vaiheiden välillä, se saattaa vaikuttaa suuremmalta kuin odotettu (voi olla jopa 2kertaa suurempi).Parametrin P0350 (staattorivastus) arvo on viimeksi käytetyn menetelmän mukainen.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200555
P0400[3] Valitse anturityyppi Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: ANTURI Voimassa: Heti - Maks: 2Taso:2Valitsee anturityypin.Termi "neliöpulssinen enkooderi" asetuksessa 2 viittaa kahteen periodiseen toimintaan, joita erottaa jokoneljännesjakso tai 90 astetta.Mahdolliset arvot:0 Estetty1 Yksikanavainen enkooderi2 Neliöpulssinen enkooderi ilman nollapulssia (2 kanavaa HTL tai TTL).Indeksi:P0400[0] : 1. Laiteparametridatasarja (DDS)P0400[1] : 2. Laiteparametridatasarja (DDS)P0400[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Parameter Terminal Track Encoder outputP0400 = 1AAANsingle endeddifferentialP0400 = 2ABAANBBNsingle endeddifferentialAlla oleva taulukko osoittaa DIP kytkimien määrityksen riippuen enkooderin tyypistä:TypeOutputsingle ended differentialTTL (e.g.1XP8001-2)HTL (e.g.1XP8001-1)111111 010101101010 000000P0408[3] Enkooderin pulssimäärä Min: 2Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 1024P-ryhmä: ANTURI Voimassa: Heti - Maks: 20000Määrittää enkooderin pulssien määrän kierroksen aikana.Indeksi:P0408[0] : 1. Laiteparametridatasarja (DDS)P0408[1] : 2. Laiteparametridatasarja (DDS)P0408[2] : 3. Laiteparametridatasarja (DDS)P0500[3] Teknologinen sovellus Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TEKN_SOV Voimassa: Heti Pikakäyttöönotto Maks: 3Taso:2Taso:3Valitsee teknologisen sovelluksen. Asettaa ohjaustilan (P1300 - Taso 2).Mahdolliset arvot:0 Vakiomomentti1 Pumput ja tuulettimet3 Yksinkertainen paikoitusIndeksi:P0500[0] : 1. Laiteparametridatasarja (DDS)P0500[1] : 2. Laiteparametridatasarja (DDS)P0500[2] : 3. Laiteparametridatasarja (DDS)56MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0601[3] Moottorin lämpötila-anturi Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: MOOTTORI Voimassa: Vahvista - Maks: 2Taso:2Valitsee moottorin lämpötila-anturin.Mahdolliset arvot:0 Ei anturia1 PTC termistori2 KTY84Indeksi:P0601[0] : 1. Laiteparametridatasarja (DDS)P0601[1] : 2. Laiteparametridatasarja (DDS)P0601[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Jos valitaan "ei anturia", moottorin lämpötilan valvonta suoritetaan moottorin termisessä laskennassaarvioidun arvon perusteella. Moottorin laskettu tai mitattu lämpötila näytetään parametrissa r0035.P0604[3] Moottorilämpötilan varoitustaso Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: °C Oletus: 130.0P-ryhmä: MOOTTORI Voimassa: Heti - Maks: 200.0Määrittää varoitustason moottorin lämpötilasuojaukselle. Laukaisun tai Imax-vähennyksen lämpötilan, kutenmääritelty parametrissä P0610 (moottorin lämpötilareaktio), arvo on aina 10 % korkeampi kuin varoitustaso.(hälytyslämpötila = 130°C, laukaisulämpötila = 1,1 x 130°C = 143°C)Indeksi:P0604[0] : 1. Laiteparametridatasarja (DDS)P0604[1] : 2. Laiteparametridatasarja (DDS)P0604[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Varoitus on voimassa vain silloin, kun "Lämpötila-anturi" on valittu (eli ei PTC:tä ).Huom.Oletusarvo riippuu parametristä P0300 (moottorityypin valinta).P0610[3] Moottorilämpötilan reaktio Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 2P-ryhmä: MOOTTORI Voimassa: Vahvista Maks: 2Taso:2Taso:3Määrittää reaktion, kun moottorilämpötila nousee varoitustasolle.Mahdolliset arvot:0 Varoitus, ei reaktiota, ei virheilmoitusta1 Varoitus, Imax-vähennys, hälytys F00112 Varoitus, ei reaktiota, hälytys F0011Indeksi:P0610[0] : 1. Laiteparametridatasarja (DDS)P0610[1] : 2. Laiteparametridatasarja (DDS)P0610[2] : 3. Laiteparametridatasarja (DDS)P0640[3] Moottorin ylikuormituskerroin [%] Min: 10.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 150.0P-ryhmä: MOOTTORI Voimassa: Heti Pikakäyttöönotto Maks: 400.0Taso:2Määrittää moottorin ylivirtarajoituksen prosentteina [%] suhteessa parametriin P0305 (moottorinnimellisvirta).Indeksi:P0640[0] : 1. Laiteparametridatasarja (DDS)P0640[1] : 2. Laiteparametridatasarja (DDS)P0640[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Rajoitettu taajuusmuuttajan maksimivirtaan tai 400 % moottorin nimellisvirrasta (P0305), riippuen kumpiarvo on alhaisempi.Lisätiedot:Ks. virtarajoituksen lohkokaaviosta.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200557
P0700[3] Komentolähteen valinta Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 2P-ryhmä: KOMENNOT Voimassa: Vahvista Pikakäyttöönotto Maks: 6Taso:1Valitsee digitaalisen komennon lähteen (ohjauspaikka).Mahdolliset arvot:0 Tehdasasetus1 BOP (näppäimistö)2 Riviliitin4 USS BOP-liitännästä5 USS COM-liitännästä6 CB COM-liitännästäIndeksi:P0700[0] : 1. Ohjausparametridatasarja (CDS)P0700[1] : 2. Ohjausparametridatasarja (CDS)P0700[2] : 3. Ohjausparametridatasarja (CDS)Huom.Tämän parametrin muuttaminen palauttaa oletusarvoihinsa kaikki asetukset kyseisessä parametrissä.Esimerkki: Muuttamalla arvo 1 arvoon 2 palauttaa kaikki digitaalitulot niiden oletusarvoihin.Muutettaessa komentolähdettä (ohjauspaikka) P0700, muuttuvat myös muut parametrit seuraavan taulukonmukaisesti.P0700 = 0 P0700 = 1 P0700 = 2 P0700 = 4 P0700 = 5 P0700 = 6P0701 1 0 1 0 0 0P0702 12 0 12 0 0 0P0703 9 9 9 9 9 9P0704 15 15 15 15 15 15P0705 15 15 15 15 15 15P0706 15 15 15 15 15 15P0707 0 0 0 0 0 0P0708 0 0 0 0 0 0P0731 52.3 52.3 52.3 52.3 52.3 52.3P0732 52.7 52.7 52.7 52.7 52.7 52.7P0733 0.0 0.0 0.0 0.0 0.0 0.0P0700 = 0 P0700 = 1 P0700 = 2 P0700 = 4 P0700 = 5 P0700 = 6P0800 0.0 0.0 0.0 0.0 0.0 0.0P0801 0.0 0.0 0.0 0.0 0.0 0.0P0840 722.0 19.0 722.0 2032.0 2036.0 2090.0P0842 0.0 0.0 0.0 0.0 0.0 0.0P0844 1.0 19.1 1.0 2032.1 2036.1 2090.1P0845 19.1 19.1 19.1 19.1 19.1 19.1P0848 1.0 1.0 1.0 2032.2 2036.2 2090.2P0849 1.0 1.0 1.0 1.0 1.0 1.0P0852 1.0 1.0 1.0 2032.3 2036.3 2090.358MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0700=0 P0700=1 P0700=2 P0700=4 P0700=5 P0700=6P1020 0.0 0.0 0.0 0.0 0.0 0.0P1021 0.0 0.0 0.0 0.0 0.0 0.0P1022 0.0 0.0 0.0 0.0 0.0 0.0P1023 722.3 722.3 722.3 722.3 722.3 722.3P1026 722.4 722.4 722.4 722.4 722.4 722.4P1028 722.5 722.5 722.5 722.5 722.5 722.5P1035 19.13 19.13 19.13 2032.13 2036.13 2090.13P1036 19.14 19.14 19.14 2032.14 2036.14 2090.14P1055 0.0 19.8 0.0 2032.8 2036.8 2090.8P1056 0.0 0.0 0.0 2032.9 2036.9 2090.9P1074 0.0 0.0 0.0 0.0 0.0 0.0P1110 0.0 0.0 0.0 0.0 0.0 0.0P1113 722.1 19.11 722.1 2032.11 2036.11 2090.11P1124 0.0 0.0 0.0 0.0 0.0 0.0P1140 1.0 1.0 1.0 2032.4 2036.4 2090.4P1141 1.0 1.0 1.0 2032.5 2036.5 2090.5P1142 1.0 1.0 1.0 2032.6 2036.6 2090.6P1230 0.0 0.0 0.0 0.0 0.0 0.0P1477 0.0 0.0 0.0 0.0 0.0 0.0P1501 0.0 0.0 0.0 0.0 0.0 0.0P2103 722.2 722.2 722.2 722.2 722.2 722.2P2104 0.0 0.0 0.0 2032.7 2036.7 2090.7P2106 1.0 1.0 1.0 1.0 1.0 1.0P2200 0.0 0.0 0.0 0.0 0.0 0.0P2220 0.0 0.0 0.0 0.0 0.0 0.0P2221 0.0 0.0 0.0 0.0 0.0 0.0P2222 0.0 0.0 0.0 0.0 0.0 0.0P2223 722.3 722.3 722.3 722.3 722.3 722.3P2226 722.4 722.4 722.4 722.4 722.4 722.4P2228 722.5 722.5 722.5 722.5 722.5 722.5P2235 19.13 19.13 19.13 2032.13 2036.13 2090.13P2236 19.14 19.14 19.14 2032.14 2036.14 2090.14Alla olevat parametrit pysyvät ennallaan muutettaessa P0700.The follow ing parameters are not overw ritten w hen changing P0700:P0810 P0811 P0820 P0821 P2810 P2812 P2814P2816 P2818 P2820 P2822 P2824 P2826 P2828P2830 P2832 P2834 P2837 P2840 P2843 P2846P2849 P2854 P2859 P2864MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200559
P0701[3] Digitaalitulon 1 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 1P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Taso:2Valitsee digitaalitulon 1 toiminnon.Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus.)14 MOP alas (vähennä taajuus.)15 Kiinteä ohjearvo (suoravalinta)16 Kiinteä ohjearvo (suoravalinta + ON-komento)17 Kiinteä ohjearvo (binäärikoodattu valinta + ON-komento)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0701[0] : 1. Ohjausparametridatasarja (CDS)P0701[1] : 2. Ohjausparametridatasarja (CDS)P0701[2] : 3. Ohjausparametridatasarja (CDS)Riippuvuus:Asetus 99 (Vapauta BiCo-parametrointi) voidaan nollata vain asetuksilla P0700 (komentolähde) tai P3900(pikakäyttöönoton lopetus) = 1, 2 tai P0970 (tehdasasetus) = 1.Ilmoitus:Asetus 99 (BiCo) ainoastaan asiantuntijakäyttöön.P0702[3] Digitaalitulon 2 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 12P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Valitsee digitaalitulon 2 toiminnon.Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus.)14 MOP alas (vähennä taajuus.)15 Kiinteä ohjearvo (suoravalinta)16 Kiinteä ohjearvo (suoravalinta + ON-komento)17 Kiinteä ohjearvo (binäärikoodattu valinta + ON-komento)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0702[0] : 1. Ohjausparametridatasarja (CDS)P0702[1] : 2. Ohjausparametridatasarja (CDS)P0702[2] : 3. Ohjausparametridatasarja (CDS)Lisätiedot:Ks. parametri P0701 (digitaalitulon 1 toiminto).Taso:260MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0703[3] Digitaalitulon 3 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 9P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Valitsee digitaalitulon 3 toiminnon.Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus.)14 MOP alas (vähennä taajuus.)15 Kiinteä ohjearvo (suoravalinta)16 Kiinteä ohjearvo (suoravalinta + ON-komento)17 Kiinteä ohjearvo (binäärikoodattu valinta + ON-komento)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0703[0] : 1. Ohjausparametridatasarja (CDS)P0703[1] : 2. Ohjausparametridatasarja (CDS)P0703[2] : 3. Ohjausparametridatasarja (CDS)Lisätiedot:Ks. parametri P0701 (digitaalitulon 1 toiminto).P0704[3] Digitaalitulon 4 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 15P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Taso:2Taso:2Valitsee digitaalitulon 4 toiminnon.Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus.)14 MOP alas (vähennä taajuus.)15 Kiinteä ohjearvo (suoravalinta)16 Kiinteä ohjearvo (suoravalinta + ON-komento)17 Kiinteä ohjearvo (binäärikoodattu valinta + ON-komento)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0704[0] : 1. Ohjausparametridatasarja (CDS)P0704[1] : 2. Ohjausparametridatasarja (CDS)P0704[2] : 3. Ohjausparametridatasarja (CDS)Lisätiedot:Ks. parametri P0701 (digitaalitulon 1 toiminto).MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200561
P0705[3] Digitaalitulon 5 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 15P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Valitsee digitaalitulon 5 toiminnon.Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus.)14 MOP alas (vähennä taajuus.)15 Kiinteä ohjearvo (suoravalinta)16 Kiinteä ohjearvo (suoravalinta + ON-komento)17 Kiinteä ohjearvo (binäärikoodattu valinta + ON-komento)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0705[0] : 1. Ohjausparametridatasarja (CDS)P0705[1] : 2. Ohjausparametridatasarja (CDS)P0705[2] : 3. Ohjausparametridatasarja (CDS)Lisätiedot:Ks. parametri P0701 (digitaalitulon 1 toiminto).P0706[3] Digitaalitulon 6 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 15P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Taso:2Taso:2Valitsee digitaalitulon 6 toiminnon.Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus.)14 MOP alas (vähennä taajuus.)15 Kiinteä ohjearvo (suoravalinta)16 Kiinteä ohjearvo (suoravalinta + ON-komento)17 Kiinteä ohjearvo (binäärikoodattu valinta + ON-komento)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0706[0] : 1. Ohjausparametridatasarja (CDS)P0706[1] : 2. Ohjausparametridatasarja (CDS)P0706[2] : 3. Ohjausparametridatasarja (CDS)Lisätiedot:Ks. parametri P0701 (digitaalitulon 1 toiminto).62MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0707[3] Digitaalitulon 7 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Taso:2Valitsee digitaalitulon 7 toiminnon (analogitulon kautta).Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus)14 MOP alas (vähennä taajuus)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0707[0] : 1. Ohjausparametridatasarja (CDS)P0707[1] : 2. Ohjausparametridatasarja (CDS)P0707[2] : 3. Ohjausparametridatasarja (CDS)Huom.Signaalit, joiden taso on yli 4 V ovat voimassa; signaalit, joiden taso on alle 1.6 V eivät ole voimassa.Lisätiedot:Ks. parametri P0701 (digitaalitulon 1 toiminto).P0708[3] Digitaalitulon 8 toiminto Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 99Valitsee digitaalitulon 8 toiminnon (analogitulon kautta).Mahdolliset arvot:0 Digitaalinen tulo estetty1 ON / OFF12 ON suunnanvaihto / OFF13 OFF2 – vapaa hidastuminen pysähdyksiin4 OFF3 – nopea jarrutus9 Häiriön kuittaus10 Ryömintä oikealle11 Ryömintä vasemmalle12 Suunnanvaihto13 MOP ylös (suurenna taajuus)14 MOP alas (vähennä taajuus)25 Tasavirtajarrun aktivointi29 Ulkoinen häiriö33 Taajuuslisäohjearvon esto99 Vapauta BiCo-parametrointiIndeksi:P0708[0] : 1. Ohjausparametridatasarja (CDS)P0708[1] : 2. Ohjausparametridatasarja (CDS)P0708[2] : 3. Ohjausparametridatasarja (CDS)Huom.Signaalit, joiden taso on yli 4 V ovat voimassa; signaalit, joiden taso on alle 1.6 V eivät ole voimassa.Lisätiedot:Ks. parametri P0701 (digitaalitulon 1 toiminto).Taso:2MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200563
P0719[3] Komennon ja taajuusohjearvon valinta Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 66Taso:3Keskuskytkin taajuusmuuttajan komentolähteen valintaa varten.Vaihtaa komennon ja taajuusohjearvon lähteen vapaasti ohjelmoitavien BiCo-parametrien ja kiinteidenkomentojen ja taajuusohjearvoprofiilien välillä. Komennot ja ohjearvolähteet voidaan vaihtaa toisistaanriippumatta.Kymmenysbitti valitsee komentolähteen ja yksikköbitti valitsee ohjearvolähteen.Mahdolliset arvot:0 Komento = BiCo-parametri Ohjearvo = BiCo-parametri1 Komento = BiCo-parametri Ohjearvo = MOP-ohjearvo2 Komento = BiCo-parametri Ohjearvo = Analoginen ohjearvo3 Komento = BiCo-parametri Ohjearvo = Kiinteä taajuus4 Komento = BiCo-parametri Ohjearvo = USS BOP-liitännästä5 Komento = BiCo-parametri Ohjearvo = USS COM-liitännästä6 Komento = BiCo-parametri Ohjearvo = CB COM-liitännästä10 Komento = Peruskäyttöpaneeli (BOP) Ohjearvo = BiCo-parametri11 Komento = Peruskäyttöpaneeli (BOP) Ohjearvo = MOP-ohjearvo12 Komento = Peruskäyttöpaneeli (BOP) Ohjearvo = Analoginen ohjearvo13 Komento = Peruskäyttöpaneeli (BOP) Ohjearvo = Kiinteä taajuus14 Komento = Peruskäyttöpaneeli (BOP) Ohjearvo = USS BOP-liitännästä15 Komento = Peruskäyttöpaneeli (BOP) Ohjearvo = USS COM-liitännästä16 Komento = Peruskäyttöpaneeli (BOP) Ohjearvo = CB COM-liitännästä40 Komento = USS BOP-liitännästä Ohjearvo = BiCo-parametri41 Komento = USS BOP-liitännästä Ohjearvo = MOP-ohjearvo42 Komento = USS BOP-liitännästä Ohjearvo = Analoginen ohjearvo43 Komento = USS BOP-liitännästä Ohjearvo = Kiinteä taajuus44 Komento = USS BOP-liitännästä Ohjearvo = USS BOP-liitännästä45 Komento = USS BOP-liitännästä Ohjearvo = USS COM-liitännästä46 Komento = USS BOP-liitännästä Ohjearvo = CB COM-liitännästä50 Komento = USS COM-liitännästä Ohjearvo = BiCo-parametri51 Komento = USS COM-liitännästä Ohjearvo = MOP-ohjearvo52 Komento = USS COM-liitännästä Ohjearvo = Analoginen ohjearvo53 Komento = USS COM-liitännästä Ohjearvo = Kiinteä taajuus54 Komento = USS COM-liitännästä Ohjearvo = USS BOP-liitännästä55 Komento = USS COM-liitännästä Ohjearvo = USS COM-liitännästä56 Komento = USS COM-liitännästä Ohjearvo = CB COM-liitännästä60 Komento = CB COM-liitännästä Ohjearvo = BiCo-parametri61 Komento = CB COM-liitännästä Ohjearvo = MOP-ohjearvo62 Komento = CB COM-liitännästä Ohjearvo = Analoginen ohjearvo63 Komento = CB COM-liitännästä Ohjearvo = Kiinteä taajuus64 Komento = CB COM-liitännästä Ohjearvo = USS BOP-liitännästä65 Komento = CB COM-liitännästä Ohjearvo = USS COM-liitännästä66 Komento = CB COM-liitännästä Ohjearvo = CB COM-liitännästäIndeksi:P0719[0] : 1. Ohjausparametridatasarja (CDS)P0719[1] : 2. Ohjausparametridatasarja (CDS)P0719[2] : 3. Ohjausparametridatasarja (CDS)Huom.Jos arvo on asetettu muuksi kuin 0 (esim. BiCo-parametri ei ole ohjearvon lähde), P0844 / P0848(ensimmäinen OFF2 / OFF3 -komennon lähde) eivät ole voimassa; sen sijaan, P 0845 / P0849 (toinenOFF2 / OFF3 -komennon lähde) on voimassa ja OFF-komennot saavutetaan eritellystä lähteestä.Aikaisemmin tehdyt BiCo-liitännät eivät muutu.64MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
0722 CO/BO: Digitaalitulojen arvot Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KOMENNOT Maks: -Näyttää digitaalitulojen tilan.Bittikentät:Bitti 00 Digitaalitulo 1 0 POIS1 PÄÄLLÄBitti 01 Digitaalitulo 2 0 POIS1 PÄÄLLÄBitti 02 Digitaalitulo 3 0 POIS1 PÄÄLLÄBitti 03 Digitaalitulo 4 0 POIS1 PÄÄLLÄBitti 04 Digitaalitulo 5 0 POIS1 PÄÄLLÄBitti 05 Digitaalitulo 6 0 POIS1 PÄÄLLÄBitti 06 Digitaalitulo 7 (ADC 1 kautta) 0 POIS1 PÄÄLLÄBitti 07 Digitaalitulo 8 (ADC 2 kautta) 0 POIS1 PÄÄLLÄHuom.Näyttösegmentti on valaistu kun signaali on voimassa (PÄÄLLÄ).P0731[3] BI: Digitaalilähdön 1 toiminto Min: 0:0Tila: CUT Tietotyyppi: U32 Yksikkö: - Oletus: 52:3P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 4000:0Taso:2Taso:2Määrittää digitaalilähdön 1 lähteen.Asetukset:Releen tila:52.0 Taajuusmuuttaja valmis 152.1 Taajuusmuuttaja valmis käynnistykseen 152.2 Taajuusmuuttaja käy 152.3 Taajuusmuuttaja häiriötilassa 052.4 OFF2-toiminto voimassa 052.5 OFF3-toiminto voimassa 052.6 Päällekytkentäesto voimassa 152.7 Taajuusmuuttajan varoitustila voimassa 152.8 Ohjearvo / oloarvo poikkeama 052.9 PZD-ohjaus (prosessidataohjaus) 152.A Maksimitaajuus saavutettu 152.B Varoitus: moottorin virtaraja 052.C Moottorin pitojarru päällä 052.D Moottorin ylikuormitus 052.E Moottori pyörii, suunta oikealle 152.F Taajuusmuuttajan ylikuormitus 053.0 Tasavirtajarru päällä 153.1 Taajuusmuuttajan taajuus alle katkaisurajan 153.2 Taajuusmuuttajan taajuus alle min.taajuuden 153.3 Virta suurempi tai yhtä kuin raja-arvo 153.4 Oloarvotaajuus suurempi kuin vertailutaajuus 153.5 Oloarvotaajuus pienempi kuin vertailutaajuus 153.6 Oloarvotaajuus suurempi/yhtä kuin ohjearvo 153.7 Jännite pienempi kuin kynnysarvo 153.8 Jännite suurempi kuin kynnysarvo 153.A PID-lähtö alarajalla (P2292) 153.B PID-lähtö ylärajalla (P2291) 1Indeksi:P0731[0] : 1. Ohjausparametridatasarja (CDS)P0731[1] : 2. Ohjausparametridatasarja (CDS)P0731[2] : 3. Ohjausparametridatasarja (CDS)Huom!0 = rele päästänyt (auki)1 = rele vetänyt (kiinni)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200565
P0732[3] BI: Digitaalilähdön 2 toiminto Min: 0:0Tila: CUT Tietotyyppi: U32 Yksikkö: - Oletus: 52:7P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 4000:0Taso:2Määrittää digitaalilähdön 2 lähteen.Asetukset:Releen tila:52.0 Taajuusmuuttaja valmis 152.1 Taajuusmuuttaja valmis käynnistykseen 152.2 Taajuusmuuttaja käy 152.3 Taajuusmuuttaja häiriötilassa 052.4 OFF2-toiminto voimassa 052.5 OFF3-toiminto voimassa 052.6 Päällekytkentäesto voimassa 152.7 Taajuusmuuttajan varoitustila voimassa 152.8 Ohjearvo / oloarvo poikkeama 052.9 PZD-ohjaus (prosessidataohjaus) 152.A Maksimitaajuus saavutettu 152.B Varoitus: moottorin virtaraja 052.C Moottorin pitojarru päällä 052.D Moottorin ylikuormitus 052.E Moottori pyörii, suunta oikealle 152.F Taajuusmuuttajan ylikuormitus 053.0 Tasavirtajarru päällä 153.1 Taajuusmuuttajan taajuus alle katkaisurajan 153.2 Taajuusmuuttajan taajuus alle min.taajuuden 153.3 Virta suurempi tai yhtä kuin raja-arvo 153.4 Oloarvotaajuus suurempi kuin vertailutaajuus 153.5 Oloarvotaajuus pienempi kuin vertailutaajuus 153.6 Oloarvotaajuus suurempi/yhtä kuin ohjearvo 153.7 Jännite pienempi kuin kynnysarvo 153.8 Jännite suurempi kuin kynnysarvo 153.A PID-lähtö alarajalla (P2292) 153.B PID-lähtö ylärajalla (P2291) 1Indeksi:P0732[0] : 1. Ohjausparametridatasarja (CDS)P0732[1] : 2. Ohjausparametridatasarja (CDS)P0732[2] : 3. Ohjausparametridatasarja (CDS)Huom!0 = rele päästänyt (auki)1 = rele vetänyt (kiinni)Huom.Asiantuntija-tila mahdollistaa muita asetuksia (ks. P0003 – käyttäjän käsittelytaso).66MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0733[3] BI: Digitaalilähdön 3 toiminto Min: 0:0Tila: CUT Tietotyyppi: U32 Yksikkö: - Oletus: 0:0P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 4000:0Taso:2Määrittää digitaalilähdön 3 lähteen.Asetukset:Releen tila:52.0 Taajuusmuuttaja valmis 152.1 Taajuusmuuttaja valmis käynnistykseen 152.2 Taajuusmuuttaja käy 152.3 Taajuusmuuttaja häiriötilassa 052.4 OFF2-toiminto voimassa 052.5 OFF3-toiminto voimassa 052.6 Päällekytkentäesto voimassa 152.7 Taajuusmuuttajan varoitustila voimassa 152.8 Ohjearvo / oloarvo poikkeama 052.9 PZD-ohjaus (prosessidataohjaus) 152.A Maksimitaajuus saavutettu 152.B Varoitus: moottorin virtaraja 052.C Moottorin pitojarru päällä 052.D Moottorin ylikuormitus 052.E Moottori pyörii, suunta oikealle 152.F Taajuusmuuttajan ylikuormitus 053.0 Tasavirtajarru päällä 153.1 Taajuusmuuttajan taajuus alle katkaisurajan 153.2 Taajuusmuuttajan taajuus alle min.taajuuden 153.3 Virta suurempi tai yhtä kuin raja-arvo 153.4 Oloarvotaajuus suurempi kuin vertailutaajuus 153.5 Oloarvotaajuus pienempi kuin vertailutaajuus 153.6 Oloarvotaajuus suurempi/yhtä kuin ohjearvo 153.7 Jännite pienempi kuin kynnysarvo 153.8 Jännite suurempi kuin kynnysarvo 153.A PID-lähtö alarajalla (P2292) 153.B PID-lähtö ylärajalla (P2291) 1Indeksi:P0733[0] : 1. Ohjausparametridatasarja (CDS)P0733[1] : 2. Ohjausparametridatasarja (CDS)P0733[2] : 3. Ohjausparametridatasarja (CDS)Huom!0 = rele päästänyt (auki)1 = rele vetänyt (kiinni)Huom."Asiantuntija-tila mahdollistaa muita asetuksia (ks. P0003 – käyttäjän käsittelytaso).r0747 CO/BO: Digitaalilähtöjen tila Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KOMENNOT Maks: -Taso:3Näyttää digitaalilähtöjen tilan (sisältää myös digitaalitulojen inversio parametrin P0748 kautta).Bittikentät:Bitti 00 Digitaalilähtö 1 päällä 0 EI1 KYLLÄBitti 01 Digitaalilähtö 2 päällä 0 EI1 KYLLÄBitti 02 Digitaalilähtö 3 päällä 0 EI1 KYLLÄRiippuvuus:Bitti 0 = 0 rele aukiBitti 0 = 1 rele kiinniMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200567
P0756[2] AD-muuntimen tyyppi (analogitulo) Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 4Taso:2Määrittää analogitulon tyypin ja mahdollistaa myös analogitulon valvonnan.Vaihtaaksesi jännite- tai virtaviestin välillä analogitulossa, pelkästään parametrin P0756 arvon muuttaminenei riitä, vaan ohjauskortin DIP-kytkinten pitää myös olla oikein asetettu. DIP-asetukset ovat:- OFF = tulojännite (10 V)- ON = tulovirta (20 mA)DIP-kytkimien allokaatio analogituloihin on:- DIP vasemmalla (DIP 1) = Analogitulo 1- DIP oikealla (DIP 2) = Analogitulo 2Mahdolliset arvot:0 Unipolaari tulojännite (0 – +10 V)1 Unipolaari tulojännite valvonnalla (0 – 10 V)2 Unipolaari tulovirta (0 – 20 mA)3 Unipolaari tulovirta valvonnalla (0 – 20 mA)4 Bipolaari tulojännite (-10 V – +10 V)Indeksi:P0756[0] : Analogitulo 1 (ADC 1)P0756[1] : Analogitulo 2 (ADC 2)Riippuvuus:Tämä toiminto on estetty, jos analoginen skaalauslohko (ks. P0757 – P0760) on ohjelmoitu antamaanlähdöstään negatiivisia ohjearvoja.Ilmoitus:Kun valvonta on aktivoitu ja kuoloalue määritelty (P0761), häiriötila tulee voimaan (F0080) jos analogitulonjännite putoaa alle 50 % kuoloalueen jännitteestä.H/w-rajoituksen johdosta ei ole mahdollista valita bipolaaria jännitettä (ks. Mahdollisten arvojen määrittely)analogitulolle 1 (P0756[1] = 4).Lisätiedot:Ks. P0757 – P0760 (ADC-skaalaus).68MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0757[2] ADC-skaalauksen arvo X1 [V / mA] Min: -20Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 20Taso:2Parametrit P0757 – P0760 konfiguroivat analogitulon skaalauksen seuraavasti:(kts. Lohkokaavio nro 2200)P0756 = 0 ... 3, P0761 = 0%100 %ASPmax4000 hP0760P0757P075910 V20 mAx 100%VmAP0758ASPminAnalogiset ohjearvot ovat prosentteina [%] normalisoidusta taajuudesta parametrissä P2000.Analogiset ohjearvot voivat olla suurempia kuin 100 %.ASPmaks edustaa suurinta analogista ohjearvoa (10 V).ASPmin edustaa pienintä analogista ohjearvoa (0 V).Ohjearvot antavat skaalauksen, jossa 0 V = 0 % ja 10 V = 100 %.P0756 = 4, P0761 = 0%100 %ASPmax4000 hP0760P0757-10 VP075910 Vx 100%VP0758ASPminIndeksi:P0757[0] : Analogitulo 1 (ADC 1)P0757[1] : Analogitulo 2 (ADC 2)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200569
P0758[2] ADC-skaalauksen arvo Y1 Min: -99999.9Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 0.0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 99999.9Taso:2Asettaa arvon Y1 prosenteissa [%] parametrissä P0757 (ADC-skaalaus) esitetyllä tavalla.(kts. Lohkokaavio nro 2200)Indeksi:P0758[0] : Analogitulo 1 (ADC 1)P0758[1] : Analogitulo 2 (ADC 2)Riippuvuus:Vaikuttaa parametreihin P2000 – P2003 (vertailutaajuus, jännite, virta tai momentti) riippuen, minkäohjearvon pitäisi tuottaa.P0759[2] ADC-skaalauksen arvo X2 [V / mA] Min: -20Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 10P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 20Taso:2Asettaa arvon X2 parametrin P0757 (ADC-skaalaus) esitetyllä tavalla. (kts. Lohkokaavio nro 2200)Indeksi:P0759[0] : Analogitulo 1 (ADC 1)P0759[1] : Analogitulo 2 (ADC 2)P0760[2] ADC-skaalauksen arvo Y2 Min: -99999.9Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 100.0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 99999.9Asettaa arvon Y2 prosenteissä [%] parametrissä P0757 (ADC-skaalaus) esitetyllä tavalla.(kts. Lohkokaavio nro 2200)Indeksi:P0760[0] : Analogitulo 1 (ADC 1)P0760[1] : Analogitulo 2 (ADC 2)Riippuvuus:Vaikuttaa parametreihin P2000 – P2003 (vertailutaajuus, jännite, virta tai momentti) riippuen, minkäohjearvon pitäisi tuottaa.P0761[2] ADC-kuoloalueen leveys [V / mA] Min: 0Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 20Taso:2Taso:2Määrittää analogitulon kuoloalueen leveyden. Alla oleva kaavio selittää sen käytön.Esimerkki:ADC arvo 2 – 10 V (0 – 50 Hz)Yllä oleva esimerkki antaa 2 – 10 V analogituloksi (0 – 50 Hz)P0757 = 2 V P0761 = 2 V P2000 = 50 Hz%ymax-10-20y2(P0760)x1(P0757)y1(P0758)x210(P0759)20VmAyminADC arvo 2 – 10 V (-50 – +50 Hz)Yllä oleva esimerkki antaa 2 – 10 V analogituloksi (-50 – +50 Hz) niin, että keskellä on nolla ja "pitopisteen"leveys on 0.2 V.P0758 = -100 % P0761 = 0.1 (0.1 V keskikohdan kummallakin puolella)70MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
%ymaxy2-10-20x1{ {P761y1x21020VmAyminIndeksi:P0761[0] : Analogitulo 1 (ADC 1)P0761[1] : Analogitulo 2 (ADC 2)Huom.P0761[x] = 0 : Ei kuoloaluetta.Ilmoitus:Kuoloalue voi alkaa 0 V ja parametrissä P0761 asetetun arvojen väliltä, jos parametri P0758 on positiivinenja parametri P0760 negatiivinen (ADC-skaalauksen y-koordinaatit). Kuoloalue on kuitenkin voimassamolempiin suuntiin leikkauspisteestä (x-akselista ADC-skaalauskäyrällä), jos parametrien P0758 ja P0760merkit ovat päinvastaisia.Taajuuden Fmin (P1080) tulee olla nolla, kun käytetään keskinollakonfiguraatiota. Kuoloalueen päässä eiole hystereesiä.P0771[2] CI: DA-muunnin (DAC) (analogilähtö) Min: 0:0Tila: CUT Tietotyyppi: U32 Yksikkö: - Oletus: 21:0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 4000:0Taso:2Määrittää 0 – 20 mA analogilähdön toiminnon. (kts. Lohkokaavio nro 2300)Asetukset:21 CO: Taajuusoloarvo (skaalattu parametrin P2000 mukaan)24 CO: Tod. lähtötaajuus (skaalattu parametrin P2000 mukaan)25 CO: Tod. lähtöjännite (skaalattu parametrin P2001 mukaan)26 CO: Tod. välipiirijännite (skaalattu parametrin P2001 mukaan)27 CO: Tod. lähtövirta (skaalattu parametrin P2002 mukaan)Indeksi:P0771[0] : Analogilähtö 1 (DAC 1)P0771[1] : Analogilähtö 2 (DAC 2)P0776[2] DA-muuntimen tyyppi Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 1Taso:2Määrittää analogilähdön tyyppi.Mahdolliset arvot:0 Lähtövirta1 LähtöjänniteIndeksi:P0776[0] : Analogilähtö 1 (DAC 1)P0776[1] : Analogilähtö 2 (DAC 2)Huom.Analogilähtö on virtaviesti 0 – 20 mA.Jos halutaan lähtöjännite joka on 0 ja 10 V välillä, liittimiin pitää olla kytketty ulkoinen 500 Ohmin vastus.(Ohjausliittimet 12/13 tai 26/27).MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200571
P0777[2] DAC-skaalauksen arvo x1 Min: -99999.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 0.0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 99999.0Taso:2Märittelee lähtöominaiskäyrän arvon x1 prosenteissa [%]. Lohko skaalaa parametrin P0771 (DACkonnektorinlähtö) arvon. (kts. Lohkokaavio nro 2300)Skaalauslohkon (P0777 ... P0781) parametrit toimivat seuraavasti:Output signal (mA)20 20 mAP0780 Y2P0778 Y10(-100%)P0777X1P0779X2100%Missä:Pisteet P1 (x1, y1) ja P2 (x2, y2) ovat vapaasti valittavissa.Esimerkki:Skaalauslohkon oletusarvo antaa seuraavan skaalauksen:P1: 0.0 % = 0 mA tai 0 V ja P2: 100.0 % = 20 mA tai 20 V.Indeksi:P0777[0] : Analogilähtö 1 (DAC 1)P0777[1] : Analogilähtö 2 (DAC 2)Riippuvuus:Vaikuttaa parametreihin P2000 – P2003 (vertailutaajuus, jännite, virta tai momentti) riippuen, minkäohjearvon pitäisi tuottaa.P0778[2] DAC-skaalauksen arvo y1 Min: 0Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 20Taso:2Määrittää lähtöominaiskäyrän arvon y1. (kts. Lohkokaavio nro 2300)Indeksi:P0778[0] : Analogilähtö 1 (DAC 1)P0778[1] : Analogilähtö 2 (DAC 2)P0779[2] DAC-skaalauksen arvo x2 Min: -99999.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 100.0P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 99999.0Taso:2Määrittää lähtöominaiskäyrän arvon x2 prosentissa [%]. (kts. Lohkokaavio nro 2300)Indeksi:P0779[0] : Analogilähtö 1 (DAC 1)P0779[1] : Analogilähtö 2 (DAC 2)Riippuvuus:Vaikuttaa parametreihin P2000 – P2003 (vertailutaajuus, jännite, virta tai momentti) riippuen, minkäohjearvon pitäisi tuottaa.P0780[2] DAC-skaalauksen arvo y2 Min: 0Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 20P-ryhmä: OHJAUS Voimassa: Vahvista - Maks: 20Määrittää lähtöominaiskäyrän arvon y2. (kts. Lohkokaavio nro 2300)Indeksi:P0780[0] : Analogilähtö 1 (DAC 1)P0780[1] : Analogilähtö 2 (DAC 2)Taso:272MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0918 CB-osoite Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 3P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 65535Taso:2Määrittää tietoliikennekortin(CB) osoitteen tai toisten lisävarustemoduulien osoitteen.Väyläosoitetta voidaan asettaa kahdella tavalla:1: PROFIBUS-moduulin DIP-kytkinten avulla2: Käyttäjän syöttämän arvon avullaHuom.Mahdolliset PROFIBUS-asetukset:1 ... 1250, 126, 127 eivät ole sallittujaSeuraavat ovat voimassa kun käytössä on PROFIBUS-moduuli:DIP-kytkin = 0 Parametrissä P0918 (CB-osoite) määritelty osoite on voimassa.DIP-kytkin ≠ 0 DIP-kytkimen asetus priorisoidaan ja parametri P0918 ilmaisee DIP-kytkimenasetuksen.P0927 Parametrin muuttamistapa Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 15P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 15Määrittää minkä liitännän kautta parametrejä voidaan muuttaa.Esimerkki:"b - - n n" (bitit 0, 1, 2 ja 3 asetettu) oletusasetuksessa tarkoittaa, että tätä parametriä voidaan muuttaaminkä tahansa liitännän avulla."b - - r n" (bitit 0, 1 ja 3 asetettu) Määrittää, että tätä parametriä voidaan muuttaa PROFIBUS/CB-osoitteidenavulla, BOP-liitännästä ja USS COM-liitännästä (RS485 USS), mutta ei USS BOP-liitännästä (RS232).Bittikentät:Bitti 00 PROFIBUS / CB 0 EI1 KYLLÄBitti 01 Peruskäyttöpaneeli 0 EI1 KYLLÄBitti 02 USS BOP-liitännästä 0 EI1 KYLLÄBitti 03 USS COM-liitännästä 0 EI1 KYLLÄLisätiedot:Seitsenosainen näyttö on selitetty luvussa "Johdatus MICROMASTER <strong>440</strong> parametreihin".Taso:2MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200573
0947[8] Viimeisin häiriökoodi Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: HÄLYTYKSET Maks: -Taso:2Näyttää aiemmat häiriöt alla olevan kaavan mukaan,jossa:"F1" on 1. voimassa oleva häiriö (ei vielä kuitattu)."F2" on 2. voimassa oleva häiriö (ei vielä kuitattu)."F1e" on häiriöiden F1 & F2 kuittaustapahtuma.Tämä siirtää indeksin 2 arvot alaspäin seuraavan indeksin kohdalle, johon ne tallennetaan. Viimeisimmäthäiriötapahtumat tallennetaan indeksien 0 ja 1 alle. Kun häiriöt kuitataan, indeksit 0 ja 1 nollaantuvat.F101F2ACTIVE FAULTCODESF1e2F1e3F1eMOST RECENTFAULT CODES - 1F1e45F1eMOST RECENTFAULT CODES - 2F1e67MOST RECENTFAULT CODES - 3Esimerkki:Jos taajuusmuuttajassa tapahtuu alijännitehäiriö ja se saa tiedon ulkoisesta häiriöstä, ennen kuinalijännitehäiriö on kuitattu, parametri saa seuraavat arvot:Indeksi 0 = 3 AlijänniteIndeksi 1 = 85 Ulkoinen häiriöAina, kun jokin häiriö indeksissä 0 kuitataan (F1e), häiriöhistoria muuttuu alla olevan kaavan mukaisesti.Indeksi:r0947[0] : Viimeinen häiriöilmoitus --, häiriö 1r0947[1] : Viimeinen häiriöilmoitus --, häiriö 2r0947[2] : Viimeinen häiriöilmoitus -1, häiriö 3r0947[3] : Viimeinen häiriöilmoitus -1, häiriö 4r0947[4] : Viimeinen häiriöilmoitus -2, häiriö 5r0947[5] : Viimeinen häiriöilmoitus -2, häiriö 6r0947[6] : Viimeinen häiriöilmoitus -3, häiriö 7r0947[7] : Viimeinen häiriöilmoitus -3, häiriö 8Riippuvuus:Indeksi 2 käytetään vain, jos toinen häiriö esiintyy ennen kuin ensimmäinen häiriö on kuitattu.Lisätiedot:Ks. hälytykset ja varoitukset.74MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
0948[12] Häiriön aika Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: HÄLYTYKSET Maks: -Taso:3Aikaleima, joka osoittaa milloin häiriö esiintyi. Parametri P2114 (käyttötuntilaskuri) tai parametri P2115(reaaliaikainen kello) ovat aikaleiman mahdollisia lähteitä.Esimerkki:Aika otetaan parametristä P2115, jos tämä parametri on päivitetty oikealla ajalla, muussa tapauksessakäytetään parametri P2114.Indeksi:r0948[0] : Viimeinen häiriöilmoitus --, häiriön aika sekunnit+minuutitr0948[1] : Viimeinen häiriöilmoitus --, häiriön aika tunnit+päivätr0948[2] : Viimeinen häiriöilmoitus --, häiriön aika kuukausi+vuosir0948[3] : Viimeinen häiriöilmoitus -1, häiriön aika sekunnit+minuutitr0948[4] : Viimeinen häiriöilmoitus -1, häiriön aika tunnit+päivätr0948[5] : Viimeinen häiriöilmoitus -1, häiriön aika kuukausi+vuosir0948[6] : Viimeinen häiriöilmoitus -2, häiriön aika sekunnit+minuutitr0948[7] : Viimeinen häiriöilmoitus -2, häiriön aika tunnit+päivätr0948[8] : Viimeinen häiriöilmoitus -2, häiriön aika kuukausi+vuosir0948[9] : Viimeinen häiriöilmoitus -3, häiriön aika sekunnit+minuutitr0948[10] : Viimeinen häiriöilmoitus -3, häiriön aika tunnit+päivätr0948[11] : Viimeinen häiriöilmoitus -3, häiriön aika kuukausi+vuosiHuom.Parametriä P2115 voidaan päivittää mm. Tekstipaneelin (AOP) ja Starter- tai DriveMonitor -ohjelmistonkautta.r0949[8] Häiriön arvo Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: HÄLYTYKSET Maks: -Taso:3Näyttää taajuusmuuttajan häiriöiden arvot.Indeksi:r0949[0] : Viimeinen häiriöilmoitus --, häiriön arvo 1r0949[1] : Viimeinen häiriöilmoitus --, häiriön arvo 2r0949[2] : Viimeinen häiriöilmoitus -1, häiriön arvo 3r0949[3] : Viimeinen häiriöilmoitus -1, häiriön arvo 4r0949[4] : Viimeinen häiriöilmoitus -2, häiriön arvo 5r0949[5] : Viimeinen häiriöilmoitus -2, häiriön arvo 6r0949[6] : Viimeinen häiriöilmoitus -3, häiriön arvo 7r0949[7] : Viimeinen häiriöilmoitus -3, häiriön arvo 8P0952 Häiriöiden kokonaismäärä Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: HÄLYTYKSET Voimassa: Vahvista - Maks: 8Taso:3Näyttää parametrissä P0947 (viimeisin häiriökoodi) tallennettujen häiriöiden määrän.Riippuvuus:Asettamalla 0 häiriöhistoria nollaantuu (muuttamalla arvo 0:ksi nollaa myös parametrin P0948 - häiriönaika).MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200575
0967 Ohjaussana 1 Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KÄYT.OTTO Maks: -Näyttää ohjaussanan 1.Bittikentät:Bitti 00 ON/OFF1 0 EI1 KYLLÄBitti 01 OFF2: Välitön pysäytys 0 KYLLÄ1 EIBitti 02 OFF3: Nopea pysäytys 0 KYLLÄ1 EIBitti 03 Pulssi vapautettu 0 EI1 KYLLÄBitti 04 Ramppigeneraattori päällä 0 EI1 KYLLÄBitti 05 Ramppigeneraattori aktivoitu 0 EI1 KYLLÄBitti 06 Ohjearvo aktivoitu 0 EI1 KYLLÄBitti 07 Häiriön kuittaus 0 EI1 KYLLÄBitti 08 Ryömintä oikealle 0 EI1 KYLLÄBitti 09 Ryömintä vasemmalle 0 EI1 KYLLÄBitti 10 PLC-ohjaus 0 EI1 KYLLÄBitti 11 Suunnanvaihto (ohjearvo-inversio) 0 EI1 KYLLÄBitti 13 Moottorin potentiometri (MOP) ylös 0 EI1 KYLLÄBitti 14 Moottorin potentiometri (MOP) alas 0 EI1 KYLLÄBitti 15 Ohjausparametridatasarja (CDS) Bitti 0 0 EI(paikallis-/kauko-) 1 KYLLÄr0968 Tilasana 1 Min: -Tietotyyppi: U16 Yksikkö: - Oletus: -P-ryhmä: KÄYT.OTTO Maks: -Taso:3Taso:3Näyttää taajuusmuuttajan voimassa olevan tilasanan (binääri), voidaan käyttää voimassa olevienkomentojen diagnostisoinnissa.Bittikentät:Bitti 00 Taajuusmuuttaja valmis 0 EI1 KYLLÄBitti 01 Taajuusmuuttaja valmis käynnistykseen 0 EI1 KYLLÄBitti 02 Taajuusmuuttaja käynnissä 0 EI1 KYLLÄBitti 03 Taajuusmuuttaja häiriötilassa 0 EI1 KYLLÄBitti 04 OFF2 voimassa 0 KYLLÄ1 EIBitti 05 OFF3 voimassa 0 KYLLÄ1 EIBitti 06 ON-esto aktivoitu 0 EI1 KYLLÄBitti 07 Taajuusmuuttajan varoitustila voimassa 0 EI1 KYLLÄBitti 08 Ohjearvon poikkeama / tod. arvo 0 KYLLÄ1 EIBitti 09 PZD-ohjaus 0 EI1 KYLLÄBitti 10 Maksimitaajuus saavutettu 0 EI1 KYLLÄBitti 11 Varoitus: Moottorin virtarajoitus 0 KYLLÄ1 EIBitti 12 Moottorin pitojarru päällä 0 EI1 KYLLÄBitti 13 Moottorin ylikuormitus 0 KYLLÄ1 EIBitti 14 Moottori käy, suunta oikealle 0 EI1 KYLLÄBitti 15 Taajuusmuuttajan ylikuormitus 0 KYLLÄ1 EI76MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P0970 Tehdasasetukset Min: 0Tila: C Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: PAR_PALAUTUS Voimassa: Vahvista - Maks: 1Taso:1P0970 = 1 palauttaa kaikille parametreille tehdasasetusten mukaisen arvon.Mahdolliset arvot:0 Estetty1 Parametrien nollausRiippuvuus:Aseta ensin P0010 = 30 (tehdasasetukset)Taajuusmuuttajaa pitää pysäyttää (eli kaikki pulssit estetty) ennen kuin parametrit voidaan palauttaaoletusasetuksiin.Huom.Seuraavien parametrien arvot eivät muutu tehdasasetusarvoihin palauttamisen jälkeen:P0918 (CB-osoite),P2010 (USS siirtonopeus) jaP2011 (USS-osoitteet)P0971 Datasiirto RAMista EEPROMiin Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 1Siirtää arvoja RAMista EEPROMiin, kun arvoksi on asetettu 1.Mahdolliset arvot:0 Estetty1 Aloita siirtoHuom.Kaikki arvot RAMissa siirtyvät EEPROMiin.Parametrin arvo palautuu automaattisesti arvoon 0 (oletus) onnistuneen siirron jälkeen.Taso:3MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200577
P1000[3] Taajuusohjearvon valinta Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 2P-ryhmä: OHJEARVO Voimassa: Vahvista Pikakäyttöönotto Maks: 77Taso:1Valitsee taajuusohjearvon lähteen. Alla olevassa taulukossa mahdollisista asetuksista, pääohjearvo valitaanvähiten merkittävästä numerosta (0 – 6) ja mahdollinen lisäohjearvo merkittävimmästä numerosta (x0 – x6).Esimerkki:Asettamalla 12 valitsee pääohjearvon (2) derivoitu analogitulosta lisäohjearvolla (1), joka on otettumoottoripotentiometristä.Asetukset:1 Moottorin potentiometrin ohjearvo2 Analogitulo3 Kiinteän taajuuden ohjearvo4 USS BOP-liitännästä5 USS COM-liitännästä6 Tietoliikennekortti (CB) COM-liitännästäMuut asetukset, mukaan lukien lisäohjearvo, ovat mahdollisia käyttämällä alla olevaa taulukkoa.Mahdolliset arvot:0 Ei pääohjearvoa1 Moottoripotentiometrin(MOP) ohjearvo2 Analoginen ohjearvo3 Kiinteä taajuus4 USS Peruskäyttöpaneelin (BOP) liitännässä5 USS COM-liitännästä6 CB COM-liitännästä7 Analoginen ohjearvo 210 Ei pääohjearvoa + MOP-ohjearvo11 MOP-ohjearvo + MOP-ohjearvo12 Analoginen ohjearvo + MOP-ohjearvo13 Kiinteä taajuus + MOP-ohjearvo14 USS BOP-liitännästä + MOP-ohjearvo15 USS COM-liitännästä + MOP-ohjearvo16 CB COM-liitännästä + MOP-ohjearvo17 Analoginen ohjearvo 2 + MOP-ohjearvo20 Ei pääohjearvoa + Analoginen ohjearvo21 MOP-ohjearvo + Analoginen ohjearvo22 Analoginen ohjearvo + Analoginen ohjearvo23 Kiinteä taajuus + Analoginen ohjearvo24 USS BOP-liitännästä + Analoginen ohjearvo25 USS COM-liitännästä + Analoginen ohjearvo26 CB COM-liitännästä + Analoginen ohjearvo27 Analoginen ohjearvo 2 + Analoginen ohjearvo30 Ei pääohjearvoa + Kiinteä taajuus31 MOP-ohjearvo + Kiinteä taajuus32 Analoginen ohjearvo + Kiinteä taajuus33 Kiinteä taajuus + Kiinteä taajuus34 USS BOP-liitännästä + Kiinteä taajuus35 USS COM-liitännästä + Kiinteä taajuus36 CB COM-liitännästä + Kiinteä taajuus37 Analoginen ohjearvo 2 + Kiinteä taajuus40 Ei pääohjearvoa + USS BOP-liitännästä41 MOP-ohjearvo + USS BOP-liitännästä42 Analoginen ohjearvo + USS BOP-liitännästä43 Kiinteä taajuus + USS BOP-liitännästä44 USS BOP-liitännästä + USS BOP-liitännästä45 USS COM-liitännästä + USS BOP-liitännästä46 CB COM-liitännästä + USS BOP-liitännästä47 Analoginen ohjearvo 2 + USS BOP-liitännästä50 Ei pääohjearvoa + USS COM-liitännästä51 MOP-ohjearvo + USS COM-liitännästä52 Analoginen ohjearvo + USS COM-liitännästä53 Kiinteä taajuus + USS COM-liitännästä54 USS BOP-liitännästä + USS COM-liitännästä55 USS COM-liitännästä + USS COM-liitännästä56 CB COM-liitännästä + USS COM-liitännästä57 Analoginen ohjearvo 2 + USS COM-liitännästä60 Ei pääohjearvoa + CB COM-liitännästä61 MOP-ohjearvo + CB COM-liitännästä62 Analoginen ohjearvo + CB COM-liitännästä63 Kiinteä taajuus + CB COM-liitännästä64 USS BOP-liitännästä + CB COM-liitännästä65 USS COM-liitännästä + CB COM-liitännästä66 CB COM-liitännästä + CB COM-liitännästä67 Analoginen ohjearvo 2 + CB COM-liitännästä70 Ei pääohjearvoa + Analoginen ohjearvo 271 MOP-ohjearvo + Analoginen ohjearvo 272 Analoginen ohjearvo + Analoginen ohjearvo 278MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
73 Kiinteä taajuus + Analoginen ohjearvo 274 USS BOP-liitännästä + Analoginen ohjearvo 275 USS COM-liitännästä + Analoginen ohjearvo 276 CB COM-liitännästä + Analoginen ohjearvo 277 Analoginen ohjearvo 2 + Analoginen ohjearvo 2Indeksi:P1000[0] : 1. Ohjausparametridatasarja (CDS)P1000[1] : 2. Ohjausparametridatasarja (CDS)P1000[2] : 3. Ohjausparametridatasarja (CDS)Huom.Yksittäiset bitit merkitsevät pelkkää ohjearvoa, ilman lisäohjearvoja.P1001[3] Kiinteä taajuus 1 Min: -650.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 0.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Taso:2Määrittää kiinteän taajuuden ohjearvon 1.Kiinteitä taajuuksia käytetään kolmella tavalla:1. Suoravalinta2. Suoravalinta + ON-komento3. Binäärikoodattu valinta + ON-komento1. Suoravalinta (P0701 – P0706 = 15)Tässä toimintamuodossa 1 digitaalitulo valitsee 1 kiinteän taajuuden.Jos useita tuloja on voimassa yhtä aikaa, valitut taajuudet summataan.Esim. FF1 + FF2 + FF3 + FF4 + FF5 + FF6.2. Suoravalinta + ON-komento (P0701 - P0706 = 16)Kiinteän taajuuden valinta yhdistää kiinteän taajuuden ON-komennon kanssa.Tässä toimintamuodossa 1 digitaalitulo valitsee 1 kiinteän taajuuden.Jos useita tuloja on voimassa yhtä aikaa, valitut taajuudet summataan.Esim. FF1 + FF2 + FF3 + FF4 + FF5 + FF6.3. Binäärikoodattu valinta + ON-komento (P0701 - P0706 = 17)Tätä menetelmää käyttäen voi valita jopa 16 kiinteää taajuutta. Kiinteät taajuudet valitaan seuraavantaulukon mukaisesti:DIN4 DIN3 DIN2 DIN1OFF Pois Pois Pois PoisP1001 FF1 Pois Pois Pois PäälläP1002 FF2 Pois Pois Päällä PoisP1003 FF3 Pois Pois Päällä PäälläP1004 FF4 Pois Päällä Pois PoisP1005 FF5 Pois Päällä Pois PäälläP1006 FF6 Pois Päällä Päällä PoisP1007 FF7 Pois Päällä Päällä PäälläP1008 FF8 Päällä Pois Pois PoisP1009 FF9 Päällä Pois Pois PäälläP1022 FF10 Päällä Pois Päällä PoisP1011 FF11 Päällä Pois Päällä PäälläP1012 FF12 Päällä Päällä Pois PoisP1013 FF13 Päällä Päällä Pois PäälläP1014 FF14 Päällä Päällä Päällä PoisP1015 FF15 Päällä Päällä Päällä PäälläIndeksi:P1001[0] : 1. Laiteparametridatasarja (DDS)P1001[1] : 2. Laiteparametridatasarja (DDS)P1001[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Valitse käyttö käyttäen kiinteän taajuuden (parametri P1000).Taajuusmuuttaja vaatii ON-komennon käynnistyäkseen, jos käytetään suoravalintaa (P0701 - P0706 = 15).Huom.Kiinteät taajuudet voidaan valita käyttämällä digitaalituloja ja ne voidaan myös yhdistää ON-komentoon.P1002[3] Kiinteä taajuus 2 Min: -650.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 5.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Määrittää kiinteän taajuuden ohjearvon 2.Indeksi:P1002[0] : 1. Laiteparametridatasarja (DDS)P1002[1] : 2. Laiteparametridatasarja (DDS)P1002[2] : 3. Laiteparametridatasarja (DDS)Lisätiedot:Ks. parametri P1001 (kiinteä taajuus 1).Taso:2MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200579
P1003[3] Kiinteä taajuus 3 Min: -650.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 10.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Määrittää kiinteän taajuuden ohjearvon 3.Indeksi:P1003[0] : 1. Laiteparametridatasarja (DDS)P1003[1] : 2. Laiteparametridatasarja (DDS)P1003[2] : 3. Laiteparametridatasarja (DDS)Lisätiedot:Ks. parametri P1001 (kiinteä taajuus 1).P1004[3] Kiinteä taajuus 4 Min: -650.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 15.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Määrittää kiinteän taajuuden ohjearvon 4.Indeksi:P1004[0] : 1. Laiteparametridatasarja (DDS)P1004[1] : 2. Laiteparametridatasarja (DDS)P1004[2] : 3. Laiteparametridatasarja (DDS)Lisätiedot:Ks. parametri P1001 (kiinteä taajuus 1).P1005[3] Kiinteä taajuus 5 Min: -650.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 20.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Määrittää kiinteän taajuuden ohjearvon 5.Indeksi:P1005[0] : 1. Laiteparametridatasarja (DDS)P1005[1] : 2. Laiteparametridatasarja (DDS)P1005[2] : 3. Laiteparametridatasarja (DDS)Lisätiedot:Ks. parametri P1001 (kiinteä taajuus 1).P1006[3] Kiinteä taajuus 6 Min: -650.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 25.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Määrittää kiinteän taajuuden ohjearvon 6.Indeksi:P1006[0] : 1. Laiteparametridatasarja (DDS)P1006[1] : 2. Laiteparametridatasarja (DDS)P1006[2] : 3. Laiteparametridatasarja (DDS)Lisätiedot:Ks. parametri P1001 (kiinteä taajuus 1).P1007[3] Kiinteä taajuus 7 Min: -650.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 30.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Määrittää kiinteän taajuuden ohjearvon 7.Indeksi:P1007[0] : 1. Laiteparametridatasarja (DDS)P1007[1] : 2. Laiteparametridatasarja (DDS)P1007[2] : 3. Laiteparametridatasarja (DDS)Lisätiedot:Ks. parametri P1001 (kiinteä taajuus 1).P1058[3] Ryömintätaajuus (JOG) oikealle Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 5.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Taso:2Taso:2Taso:2Taso:2Taso:2Taso:2Ryömintäajoa käytetään moottorin liikuttamiseksi hitaasti (esim. huoltoajo). Ryömintää ohjataandigitaalituloista.Samalla kun valitaan ryömintä oikealle, tämä parametri määrittää taajuuden, jolla taajuusmuuttaja käy.Indeksi:P1058[0] : 1. Laiteparametridatasarja (DDS)P1058[1] : 2. Laiteparametridatasarja (DDS)P1058[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Parametreissä P1060 ja P1061 asetetaan ryömintänopeuden kiihdytys- ja jarrutusaika.80MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1059[3] Ryömintätaajuus (JOG) vasemmalle Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 5.00P-ryhmä: OHJEARVO Voimassa: Heti - Maks: 650.00Taso:2Samalla kun valitaan ryömintä vasemmalle, tämä parametri määrittää taajuuden, jolla taajuusmuuttaja käy.Indeksi:P1059[0] : 1. Laiteparametridatasarja (DDS)P1059[1] : 2. Laiteparametridatasarja (DDS)P1059[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Parametreissä P1060 ja P1061 asetetaan ryömintänopeuden kiihdytys- ja jarrutusaika.P1060[3] Ryöminnän (JOG) kiihdytysaika Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: s Oletus: 10.00P-ryhmä: OHJEARVO Voimassa: Vahvista - Maks: 650.00Asettaa ryöminnän kiihdytysajan. Tämä on aika, jota käytetään ryömintätoiminnossa tai silloin kun parametriP1124 (käytä ryöminnän kiihdytys- ja jarrutusaika) on voimassa.f (Hz)Taso:2f max(P1082)0time (s)P1060Indeksi:P1060[0] : 1. Laiteparametridatasarja (DDS)P1060[1] : 2. Laiteparametridatasarja (DDS)P1060[2] : 3. Laiteparametridatasarja (DDS)P1061[3] Ryöminnän (JOG) jarrutusaika Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: s Oletus: 10.00P-ryhmä: OHJEARVO Voimassa: Vahvista - Maks: 650.00Taso:2Asettaa ryöminnän jarrutusajan. Tämä on aika, jota käytetään ryömintätoiminnossa tai silloin kun parametriP1124 (käytä ryöminnän kiihdytys- ja jarrutusaika) on voimassa.f (Hz)f max(P1082)0P1061Indeksi:P1061[0] : 1. Laiteparametridatasarja (DDS)P1061[1] : 2. Laiteparametridatasarja (DDS)P1061[2] : 3. Laiteparametridatasarja (DDS)time (s)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200581
P1070[3] CI: Pääohjearvo Min: 0.00Tila: CT Tietotyyppi: U32 Yksikkö: - Oletus: 755:0P-ryhmä: OHJEARVO Voimassa: Vahvista - Maks: 4000:0Määrittää pääohjearvon lähteen.Asetukset:755 = Analogitulon 1 ohjearvo1024 = Kiinteän taajuuden ohjearvo1050 = Moottoripotentiometrin (MOP) ohjearvoIndeksi:P1070[0] : 1. Ohjausparametridatasarja (CDS)P1070[1] : 2. Ohjausparametridatasarja (CDS)P1070[2] : 3. Ohjausparametridatasarja (CDS)P1080[3] Minimitaajuus Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 0.00P-ryhmä: OHJEARVO Voimassa: Heti Pikakäyttöönotto Maks: 650.00Taso:3Taso:1Asettaa moottorin minimitaajuuden [Hz], jolla moottori käy taajuusohjearvosta riippumatta.Indeksi:P1080[0] : 1. Laiteparametridatasarja (DDS)P1080[1] : 2. Laiteparametridatasarja (DDS)P1080[2] : 3. Laiteparametridatasarja (DDS)Huom.Tässä parametrissä asetettu arvo on voimassa sekä myötä- että vastapäiväiseen pyörimissuuntaan.Tietyissä olosuhteissa (esim. kiihdytys-/jarrutus, virtarajoitus), moottori voi käydä minimitaajuuttapienemmällä taajuudella.P1082[3] Maksimitaajuus Min: 0.00Tila: CT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 50.00P-ryhmä: OHJEARVO Voimassa: Vahvista Pikakäyttöönotto Maks: 650.00Taso:1Asettaa moottorin maksimitaajuuden [Hz], jolla moottori käy taajuusohjearvosta riippumatta.Indeksi:P1082[0] : 1. Laiteparametridatasarja (DDS)P1082[1] : 2. Laiteparametridatasarja (DDS)P1082[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Sisäisesti rajoitettu 200 hertsiin tai 5 * moottorin nimellistaajuus (P0305) kun parametri P1300 ≥ 20(vektorisäätö). Tämä arvo näytetään parametrissä r0209 (maksimitaajuus).Huom.Tässä parametrissä asetettu arvo on voimassa sekä myötä- että vastapäiväiseen pyörimissuuntaan.Taajuusohje skaalataan parametrilla P2000. Tehdasasetus on 50Hz (vastaa 100% ohjetta). Josmaksimitaajuus muutetaan on P2000 muutettava myös.Taajuusmuuttajan maksimilähtötaajuus voi ylittyä, jos yksi seuraavista on voimassa:- P1335 ≠ 0 (Slip (Jättämäkompensointi):compensation active) :P1336 r0330fmax(P1335) = fmax+ fslip,max = P1082 + ⋅ ⋅P0310100 100(Lentävä käynnistys):- P1200 ≠ 0 (Flying restart active) :r0330fmax(P1200) = fmax+ 2 ⋅ fslip,nom = P1082 + 2 ⋅ ⋅ P0310100Ilmoitus:Mekaaniset rajoitukset rajoittavat moottorin maksiminopeuden.82MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1120[3] Kiihdytysaika Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: s Oletus: 10.00P-ryhmä: OHJEARVO Voimassa: Vahvista Pikakäyttöönotto Maks: 650.00Taso:1Aika, jota käytetään moottorin kiihdyttämiseksi pysähdyksistä moottorin maksimitaajuuteen (P1082), kunpyöristystä ei käytetä.f (Hz)f max(P1082)0P1120time (s)Jos aika asetetaan liian lyhyeksi, taajuusmuuttaja voi mennä häiriötilaan (ylivirta).Indeksi:P1120[0] : 1. Laiteparametridatasarja (DDS)P1120[1] : 2. Laiteparametridatasarja (DDS)P1120[2] : 3. Laiteparametridatasarja (DDS)Huom.Jos käytössä on ulkoinen taajuusohjearvo, jolle on jo asetettu kiihdytys- ja jarrutusaika (esim.ohjelmoitavalta logiikalta), taajuusmuuttajan optimaalinen suorituskyky saavutetaan silloin kun kiihdytys- jajarrutusaika parametreissä P1120 ja P1121 asetetaan hieman lyhyemmiksi kuin ohjelmoitavalta logiikalta(PLC) tulevat vastaavat arvot.P1121[3] Jarrutusaika Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: s Oletus: 10.00P-ryhmä: OHJEARVO Voimassa: Vahvista Pikakäyttöönotto Maks: 650.00Aika, joka käytetään moottorin pysäyttämiseksi moottorin maksimitaajuudelta (P1082), kun pyöristystä eikäytetä.f (Hz)Taso:1f max(P1082)time (s)0P1121Indeksi:P1121[0] : 1. Laiteparametridatasarja (DDS)P1121[1] : 2. Laiteparametridatasarja (DDS)P1121[2] : 3. Laiteparametridatasarja (DDS)Ilmoitus:Jos jarrutusaika asetetaan liian lyhyeksi, taajuusmuuttaja voi mennä häiriötilaan (ylivirta (F0001) / ylijännite(F0002)).MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200583
P1135[3] OFF3 jarrutusaika Min: 0.00Tila: CUT Tietotyyppi: Liukuva Yksikkö: s Oletus: 5.00P-ryhmä: OHJEARVO Voimassa: Vahvista Pikakäyttöönotto Maks: 650.00Taso:2Määrittää jarrutusajan maksimitaajuudesta pysähdyksiin OFF3-komennolle.Indeksi:P1135[0] : 1. Laiteparametridatasarja (DDS)P1135[1] : 2. Laiteparametridatasarja (DDS)P1135[2] : 3. Laiteparametridatasarja (DDS)Huom.Tämä aika voidaan ylittää, jos taso VDC_maks on saavutettu.84MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1200 Vauhtikäynnistys Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TOIM Voimassa: Vahvista - Maks: 6Taso:2Käynnistää taajuusmuuttajan pyörivään moottoriin nopeasti muuttamalla taajuusmuuttajan lähtötaajuudenkunnes pyörimisvauhti löydetään. Sen jälkeen moottori kiihdyttää ohjearvoon asti käyttäen normaalinkäynnistysajan.(F max+ 2 fslip nom)rate set by P1203'ramps to set pointwith normal ramp'F outtimeP1501I outI dcV nomas per V/fcharacteristicV out'motor speed found'Mahdolliset arvot:0 Vauhtikäynnistys estetty1 Vauhtikäynnistys aina voimassa, käynnistyy ohjearvon mukaiseen suuntaan2 Vauhtikäynnistys jännitteen kytkeytymisen, häiriön ja OFF2-komennon jälkeen, käynnistyyohjearvon mukaiseen suuntaan3 Vauhtikäynnistys häiriö- ja OFF2-komennon jälkeen, käynnistyy ohjearvon mukaiseen suuntaan4 Vauhtikäynnistys aina voimassa, nopeuden haku VAIN ohjearvon suuntaan5 Vauhtikäynnistys jännitteen kytkeytymisen, häiriön ja OFF2-komennon jälkeen, nopeuden hakuVAIN ohjearvon suuntaan6 Vauhtikäynnistys häiriö- ja OFF2-komennon jälkeen, nopeuden haku VAIN ohjearvon suuntaanHuom.Tämä toiminto on erityisen hyödyllinen silloin, kun moottorikäytöllä pyöritetään kuormaa isollahitausmassalla.Asetukset 1 – 3 hakevat kumpaankin suuntaan.Asetukset 4 – 6 hakevat ainoastaan ohjearvon suuntaan.Ilmoitus:Vauhtikäynnistys on suoritettava siinä tapauksessa, kun moottori mahdollisesti pyörii vielä (esim. lyhyenverkkojännitekatkoksen jälkeen) tai siinä tapauksessa, että kuorma pystyy pyörittämään moottoria. Muussatapauksessa taajuusmuuttaja menee häiriötilaan ylivirran takia.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200585
P1202[3] Vauhtikäynnistyksen virta Min: 50Tila: CUT Tietotyyppi: U16 Yksikkö: % Oletus: 100P-ryhmä: TOIM Voimassa: Vahvista - Maks: 200Taso:3Määrittää vauhtikäynnistykseen käytettävän hakuvirran.Arvo on prosenteissa [%] laskettuna moottorin nimellisvirrasta (P0305).Indeksi:P1202[0] : 1. Laiteparametridatasarja (DDS)P1202[1] : 2. Laiteparametridatasarja (DDS)P1202[2] : 3. Laiteparametridatasarja (DDS)Huom.Vähentämällä hakuvirran voit parantaa vauhtikäynnistyksen tehoa, jos järjestelmän inertia ei ole kovin suuri.P1203[3] Vauhtikäynnistyksen hakunopeus Min: 10Tila: CUT Tietotyyppi: U16 Yksikkö: % Oletus: 100P-ryhmä: TOIM Voimassa: Vahvista - Maks: 200Taso:3Asettaa lähtötaajuuden muutosnopeuden vauhtikäynnistyksen aikana pyörivään moottoriin tahdistuksen.Tämä arvo on prosenteissa [%] suhteessa oletuksen aikakertoimeen ja määrittää muutosnopeuden alun allaolevan käyrän mukaan (ja vaikuttaa siten moottoritaajuuden hakuaikaan):r0330fmax+ 2 fslip,nom = P1082 + 2 ⋅ ⋅ P0310100∆ffsearch1 msfmotort∆t[ms] fP1203 [%] = ⋅∆f[Hz][Hz]⋅2 [%]1[ms]slip,nom⇒∆f2 [%]=P1203 [%]r0330⋅ ⋅P0310100Etsimisaika on kaikkien taajuuksien välillä f_maks + 2 x f_jättämä – 0 Hz läpikäymiseen vaadittava aika.P1203 = 100 % antaa asteen, joka on 2 % kertoimesta f_jättämä,nim / [ms]P1203 = 200 % lopputuloksena olisi taajuusmuutoksen arvon muuttuminen 1 % arvosta f_jättämä,nim /[ms]Esimerkki:Moottorille, jolla on 50 Hz, 1350 rpm ja 100 %, tämä tarkoittaisi maksimi-etsimisajan 600 ms. Jos moottoripyörii, moottorin taajuuden löytäminen vaatii vähemmän aikaa.Indeksi:P1203[0] : 1. Laiteparametridatasarja (DDS)P1203[1] : 2. Laiteparametridatasarja (DDS)P1203[2] : 3. Laiteparametridatasarja (DDS)Huom.Korkeampi arvo tuottaa pienemmän muutosnopeuden ja siten pideämmän hakuajan.Pienempi arvo tuottaa päinvastaisen reaktion.86MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1210 Automaattinen uudelleenkäynnistys Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 1P-ryhmä: TOIM Voimassa: Vahvista - Maks: 6Taso:2Mahdollistaa verkkosyöttökatkoksen tai häiriön jälkeinen uudelleenkäynnistys.Mahdolliset arvot:0 Estetty1 Kuittaa häiriöt jännitteen kytkemisen jälkeen: P1211 Estetty2 Uudelleenkäynnistys verkkokatkoksen jälkeen: P1211 Estetty3 Uudelleenkäynnistys häiriön/jännitteenaleneman jälkeen: P1211 Aktivoitu4 Uudelleenkäynnistys jännitteenaleneman jälkeen: P1211 Aktivoitu5 Uudelleenkäynnistys häiriön/verkkokatkoksen jälkeen: P1211 Estetty6 Uudelleenkäynnistys häiriön/verkkokatkoksen/jännitteenaleneman jälkeen:P1211 EstettyRiippuvuus:Automaattinen uudelleenkäynnistys toimii vain, jos ON-komento pysyy voimassa jatkuvasti (esim.digitaalitulosta).Vaara:Asetukset 2 – 6 voivat aiheuttaa sen, että moottori käynnistyy uudelleen odottamattomasti!Ilmoitus:Vauhtikäynnistys on suoritettava siinä tapauksessa kun moottori mahdollisesti pyörii vielä (esim. lyhyenverkkojännitekatkoksen jälkeen) tai siinä tapauksessa, että kuorma pystyy pyörittämään moottoria (P1200).P1211 Uudelleenkäynnistysyritysten määrä Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 3P-ryhmä: TOIM Voimassa: Vahvista - Maks: 10Taso:3Täsmentää miten monta kertaa taajuusmuuttaja yrittää uudelleenkäynnistystä jos parametri P1210(vauhtikäynnistys) on aktivoitu.P1215 Pitojarrun aktivointi Min: 0Tila: T Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TOIM Voimassa: Vahvista - Maks: 1Taso:2Aktivoi/estää pitojarrun. Tämä toiminto saa taajuusmuuttajan noudattamaan alla esitettyä profiilia:On myös mahdollista saada rele kytkemään pisteessä 1 ja pisteessä 2 (jos on ohjelmoitu P0733 = 52.C)jarrun ohjaamiseksi.Point 1 Point 2f min(P1080)P1216P1217Mahdolliset arvot:0 Pitojarru estetty1 Pitojarru aktivoituHuom.Jarrurele avautuu pisteessä 1, jos tämä on aktivoitu parametrillä P0733 (digitaalilähdön toiminto) jasulkeutuu pisteessä 2.Jarrun ohjausreleeksi suositellaan lähtörele 3:a (P0733). Lähtöreleet 1 ja 2 ovat jo valmiiksi tehtaallaohjelmoituja.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200587
P1216 Pitojarrun pitoviive Min: 0Tila: T Tietotyyppi: Liukuva Yksikkö: s Oletus: 1.0P-ryhmä: TOIM Voimassa: Vahvista - Maks: 20.0Taso:2Määrittää ajan, jonka aikana taajuusmuuttaja käy taajuudella f_min ennen kiihdyttämistä pisteessä 1 (kutenesitetty parametrin P1215 (pitojarru aktivoitu) kohdalla ). Taajuusmuuttaja toteuttaa tämän profiilintaajuudessa f_min, so. se ei käytä normaalia kiihdytystä.Huom.Taajuuden f_min tyypillinen arvo tällaisessa sovelluksessa on sama kuin moottorin jättämätaajuus.Voit laskea nimellisen jättämätaajuuden käyttäen seuraava kaava:NNsyn− ra te d* f ra tedn synIlmoitus:Jos tätä toimintoa käytetään moottorin pitämiseksi tietyllä taajuudella vasten mekaanista jarrua (so. käytätrelettä mekaanisen jarrun ohjaamisen), on tärkeää, että f_min < 5 Hz; muussa tapauksessa virrankulutusvoi olla liian suuri ja rele ei avaudu, koska taajuusmuuttaja on saavuttanut virtarajan.P1217 Jarrutuksen jälkeinen pitoaika Min: 0Tila: T Tietotyyppi: Liukuva Yksikkö: s Oletus: 1.0P-ryhmä: TOIM Voimassa: Vahvista - Maks: 20.0Määrittää ajan, jonka aikana taajuusmuuttaja käy minimitaajuudella (P1080) jarrutuksen jälkeen pisteessä 2.Lisätiedot:Ks. kaavio parametrin P1215 (pitojarru aktivoitu) kohdalla.P1230[3] BI: Tasavirtajarrutuksen aktivointi Min: 0:0Tila: CUT Tietotyyppi: U32 Yksikkö: - Oletus: 0:0P-ryhmä: KOMENNOT Voimassa: Vahvista - Maks: 4000:0Aktivoi tasavirtajarrutuksen ulkoisesta lähteestä tulevan signaalin kautta. Toiminto pysyy voimassa niinkauan kun ulkoinen tulosignaali on voimassa.Tasavirtajarrutus saa aikaan sen, että moottori pysähtyy nopeasti, koska moottoriin syötetään tasavirtaa(tasavirta pitää akselin paikallaan).Kun tasavirtasignaali annetaan, moottorin lähtöpulssit estetään ja tasavirtaa syötetään vasta, kun moottorion demagnetoitunut riittävästi.Asetukset:722.0 = Digitaalitulo 1 (vaatii, että parametrin P0701 arvoksi on asetettu 99, BiCo)722.1 = Digitaalitulo 2 (vaatii, että parametrin P0702 arvoksi on asetettu 99, BiCo)722.2 = Digitaalitulo 3 (vaatii, että parametrin P0703 arvoksi on asetettu 99, BiCo)722.3 = Digitaalitulo 4 (vaatii, että parametrin P0704 arvoksi on asetettu 99, BiCo)722.4 = Digitaalitulo 5 (vaatii, että parametrin P0705 arvoksi on asetettu 99, BiCo)722.5 = Digitaalitulo 6 (vaatii, että parametrin P0706 arvoksi on asetettu 99, BiCo)722.6 = Digitaalitulo 7 (analogitulon 1 kautta vaatii, että parametrin P0707 arvoksi on asetettu 99)722.7 = Digitaalitulo 8 (analogitulon 2 kautta vaatii, että parametrin P0708 arvoksi on asetettu 99)Indeksi:P1230[0] : 1. Ohjausparametridatasarja (CDS)P1230[1] : 2. Ohjausparametridatasarja (CDS)P1230[2] : 3. Ohjausparametridatasarja (CDS)Vaara:Tiheästi tapahtuva pitkäaikainen tasavirtajarrutuksen käyttö voi aiheuttaa moottorin ylikuumenemisen.Ilmoitus:Tämä aikaviive asetetaan parametrissä P0347 (demagnetointiaika). Jos viive on liian lyhyt, seurauksena voiolla ylivirtahäiriö.P1232[3] Tasavirtajarrutuksen virta Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: % Oletus: 100P-ryhmä: TOIM Voimassa: Heti - Maks: 250Määrittää tasavirran tason prosentteina moottorin nimellisvirrasta (P0305).Indeksi:P1232[0] : 1. Laiteparametridatasarja (DDS)P1232[1] : 2. Laiteparametridatasarja (DDS)P1232[2] : 3. Laiteparametridatasarja (DDS)Taso:2Taso:3Taso:288MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1233[3] Tasavirtajarrutuksen kesto Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: s Oletus: 0P-ryhmä: TOIM Voimassa: Heti - Maks: 250Taso:2Määrittää ajan, jonka tasavirtajarrutuksen on oltava päällä OFF1-komennon jälkeen. Taajuusmuuttaja eikäynnisty, jos ON-komento annetaan tämän aikana.Arvo:P1233 = 0 : Estetty OFF1-komennon jälkeen.P1233 = 1 – 250 : Voimassa määritellyn ajan.Indeksi:P1233[0] : 1. Laiteparametridatasarja (DDS)P1233[1] : 2. Laiteparametridatasarja (DDS)P1233[2] : 3. Laiteparametridatasarja (DDS)Vaara:Tiheästi tapahtuva pitkäaikainen tasavirtajarrutuksen käyttö voi aiheuttaa moottorin ylikuumenemisen.Ilmoitus:Tasavirtajarrutus saa aikaan sen, että moottori pysähtyy nopeasti, koska moottoriin syötetään tasavirtaa(tasavirta pitää akselin paikallaan). Kun tasavirtasignaali annetaan, moottorin lähtöpulssit estetään jatasavirtaa syötetään vasta, kun moottori on demagnetoitunut riittävästi (demagnetointiaika lasketaanautomaattisesti moottoritiedoista).P1234[3] Tasavirtajarrutuksen aloitustaajuus Min: 0Tila: CUT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 650.00P-ryhmä: TOIM Voimassa: Heti - Maks: 650.00Taso:2Asettaa tasavirtajarrutuksen aloitustaajuuden OFF-komennon antamisen jälkeenIndeksi:P1234[0] : 1. Laiteparametridatasarja (DDS)P1234[1] : 2. Laiteparametridatasarja (DDS)P1234[2] : 3. Laiteparametridatasarja (DDS)Lisätiedot:Ks. parametrit P1230 (tasavirtajarrutuksen aktivointi) ja P1233 (tasavirtajarrutuksen kesto).P1236[3] Yhdistelmäjarrutuksen virta Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: % Oletus: 0P-ryhmä: TOIM Voimassa: Heti - Maks: 250Taso:2Arvo:Määrittää vaihtovirran ohella syötettävän tasavirran. Arvo annetaan prosentteina [%] suhteessa moottorinnimellisvirtaan (P0305).P1236 = 0 : Yhdistelmäjarrutus estetty.P1236= 1 – 250 : Tasavirtajarrutuksen taso määritelty prosentteina [%] moottorin nimellisvirrasta(P0305).Indeksi:P1236[0] : 1. Laiteparametridatasarja (DDS)P1236[1] : 2. Laiteparametridatasarja (DDS)P1236[2] : 3. Laiteparametridatasarja (DDS)Ilmoitus:Arvon suurentaminen lisää jarrutusteho yleensä. Jos arvo kuitenkin asetetaan liian suureksi, seurauksenavoi olla ylivirtahäiriö.P1237 Vastusjarrutus Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TOIM Voimassa: Heti - Maks: 5Vastusjarrutus absorboi jarrutusenergian. Tämä parametri määrittää jarrutusvastuksen (katkojavastuksen)nimellisen käyttöjakson.Mahdolliset arvot:0 Estetty1 5 % käyttöjakso2 10 % käyttöjakso3 20 % käyttöjakso4 50 % käyttöjakso5 100 % käyttöjaksoRiippuvuus:Tämä toiminto ei ole voimassa runkokoolla FX ja GX.Ilmoitus:Alussa jarru toimii korkealla käyttöjaksolla, joka on riippuvainen välipiirijännitetasosta. Taso pysyy samanakunnes termaalinen raja on melkein saavutettu. Sen jälkeen sovelletaan tämän parametrin määrittelemäkäyttöjakso. Vastuksen pitäisi toimia tällä tasolla rajoittamattoman ajan ilman ylikuumenemista.Huomio:Jos vastusjarrutus on aktivoitu (P1237≠0), niin silloin on Udmax-säädin kytkettävä pois päältä (P1240=0 tai2), muuten vastusjarrutus ei toimi kunnolla.Taso:2MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200589
P1240[3] Udc-säätimen konfigurointi Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 1P-ryhmä: TOIM Voimassa: Heti - Maks: 3Taso:3Aktivoi / estää Udc-säätimen.Udc-säädin ohjaa dynaamisesti välipiirijännitteen, jotta vältyttäisiin ylijännitehäiriöiltä järjestelmissä, joilla oniso huimamassa.Mahdolliset arvot:0 Udc-säädin estetty1 Udc-maks -säädin aktivoitu2 Udc-min -säädin (kineettinen puskurointi) aktivoitu3 Udc-maks ja Udc-min -säädin aktivoituIndeksi:P1240[0] : 1. Laiteparametridatasarja (DDS)P1240[1] : 2. Laiteparametridatasarja (DDS)P1240[2] : 3. Laiteparametridatasarja (DDS)Huom.Udc-maks lisää automaattisesti jarrutusajat, jotta välipiirijännite (r0026) pysyisi asetettujen rajojen (P2172)sisällä.Udc-min aktivoituu, kun välipiirijännite laskee alle minimitason. Moottorin kineettinen energia käytetäänvälipiirijännitteen puskurointiin, aiheuttaen moottorijarrutuksen.P1300[3] Ohjaustapa Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista Pikakäyttöönotto Maks: 23Taso:2Valitsee moottorin pyörimisnopeuden ja taajuusmuuttajan syöttämän jännitteen suhteen alla olevan kaavanmukaisesti:VVn'0''2'f0fnMahdolliset arvot:0 U/f , lineaarinen1 U/f , vuovirtasäädöllä (FCC)2 U/f , neliöllinen3 U/f , ohjelmoitava4 U/f , ECO-säädöllä5 U/f , tekstiilisovelluksille6 U/f , vuovirtasäädöllä (FCC) tekstiilisovelluksille19 U/f-säätö itsenäisellä jänniteohjearvolla20 Anturiton vektorisäätö21 Takaisinkytketty vektorisäätö22 Anturiton (vektori) momenttisäätö23 Takaisinkytketty (vektori) momenttisäätöIndeksi:P1300[0] : 1. Laiteparametridatasarja (DDS)P1300[1] : 2. Laiteparametridatasarja (DDS)P1300[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Sisäisesti rajoitettu 200 hertsiin tai 5 * moottorin nimellistaajuudesta (P0310) kun parametri P1300 ≥ 20(ohjaustapa = vektorisäätö). Arvo on määritelty parametrissä r1084 (maksimitaajuus)Huom.P1300 = 1 : U/f vuovirtasäädöllä (FCC)* Säilyttää moottorin vuovirran vakiona parantaen hyötysuhdetta.* Jos valitaan vuovirtasäätö (FCC), lineaarinen U/f on voimassa pienillä taajuuksilla.P1300 = 2 : U/f neliöllisellä ominaiskäyrällä* Sopii puhaltimille ja pumpuilleP1500 Määrittää momenttisäädön ohjearvon lähteen.90MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1310[3] Jatkuva jännitteenlisäys Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 50.0P-ryhmä: OHJAUS Voimassa: Heti - Maks: 250.0Taso:2Määrittää jännitelisäyksen tason prosentteina [%] suhteessa parametriin P0305 (moottorin nimellisvirta), jotakäytetään sekä lineaarisessa että neliöllisessä U/f-ominaiskäyrässä seuraavan kuvan mukaisesti:VBoost voltageLinear V/fVmaxValidity rangeVn(P0304)V ConBoost,100actual VV ConBoost,50BoostOutput voltageNormal V/f(P1300 = 0)ONOFF⏐f⏐P1310 active10tttf Boost,end0 fn(P1316)(P0310)f max(P1082)fVBoost voltageQuadratic V/fVmaxValidity rangeVn(P0304)V ConBoost,100actual VV ConBoost,50BoostOutput voltageNormal quadratic(P1300 = 2)ONOFF⏐f⏐P1310 active10ttt0f Boost,end(P1316)fn(P0310)fmax(P1082)fP1310VConBoost, 100 = P0305 ⋅P0350⋅100VConBoost,100V ConBoost,5 0 =2Indeksi:P1310[0] : 1. Laiteparametridatasarja (DDS)P1310[1] : 2. Laiteparametridatasarja (DDS)P1310[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Asetukset parametrissä P0640 (moottorin ylikuormituskerroin [%]) rajoittaa jännitelisäyksen.Huom.Kun käytetään jatkuvaa jännitelisäystä (P1310) yhdessä muiden lisäysparametrien kanssa (kiihdytyksenjännitelisäys P1311 ja käynnistyksen jännitelisäys P1312), jännitelisäysarvot yhdistetään. Näidenparametrien arvot priorisoidaan kuitenkin seuraavasti:P1310 > P1311 > P1312Ilmoitus:Jännitteen lisääminen lisää moottorin lämpenemistä, erityisesti kun moottori käy pienillä kierroksilla.∑ Boosts ≤ 300 * R SI motRs = staattorivastus (P0350)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200591
P1311[3] Kiihdytyksen jännitelisäys Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 0.0P-ryhmä: OHJAUS Voimassa: Heti - Maks: 250.0Taso:2Antaa jännitelisäyksen prosenteissa [%] suhteessa parametriin P0305 (moottorin nimellisvirta) ohjearvonpositiivisen muutoksen jälkeen ja poistaa sen kun ohjearvo saavutetaan.V maxVLinear V/fNormal V/f(P1300 = 0)Vn(P0304)100%50%f0 F Boost Min F Nom F Max(P1305 - expert) (P0310) (P1082)Indeksi:P1311[0] : 1. Laiteparametridatasarja (DDS)P1311[1] : 2. Laiteparametridatasarja (DDS)P1311[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Parametrin P0640 (moottorin ylikuormituskerroin [%]) arvo rajoittaa jännitelisäyksen.Huom.Tämä toiminto voi parantaa reaktiota pieniin positiivisiin ohjearvomuutoksiin.∑Boosts ≤ 300 * R SI motRs = staattorivastus (P0350)Ilmoitus:Jännitteen lisääminen lisää moottorin lämpenemistä.Lisätiedot:Ks. huomautus parametrin P1310 kohdalta jännitelisäysten priorisoinnista.92MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1312[3] Käynnistyksen jännitelisäys Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 0.0P-ryhmä: OHJAUS Voimassa: Heti - Maks: 250.0Taso:2Antaa vakiosuuruisen lineaarisen lisäyksen prosentteina [%] suhteessa parametriin P0305 (moottorinnimellisvirta) voimassa olevaan U/f-käyrään (joko lineaarinen tai neliöllinen) ON-komennon jälkeen ja pysyyvoimassa, kunnes ohjearvo saavutetaan. Toiminto on erityisen hyödyllinen kun huimamassa on suuri.Käynnistyksen jännitelisäyksen (P1312) asettaminen liian suureksi saa aikaan sen, että taajuusmuuttajamenee virtarajalle, mikä puolestaan rajoittaa lähtötaajuuden alle taajuusohjearvon.VV MaxV Nom(P0304)V MaxP1302Normal V/f0 F Nom(P0310)F Max(P1082)Indeksi:P1312[0] : 1. Laiteparametridatasarja (DDS)P1312[1] : 2. Laiteparametridatasarja (DDS)P1312[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Parametrin P0640 (moottorin ylikuormituskerroin [%]) arvo rajoittaa jännitelisäyksen.Ilmoitus:Jännitteen lisääminen lisää moottorin lämpenemistä.∑Boosts ≤ 300 * R SI motLisätiedot:Ks. huomautus parametrin P1310 kohdalta jännitelisäysten priorisoinnista.P1460[3] Nopeussäätimen (VC) vahvistus Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 3.0P-ryhmä: OHJAUS Voimassa: Heti - Maks: 2000.0Määrittää nopeussäätimen vahvistuksen. (Kts. lohkokaavio 7510)Indeksi:P1460[0] : 1. Laiteparametridatasarja (DDS)P1460[1] : 2. Laiteparametridatasarja (DDS)P1460[2] : 3. Laiteparametridatasarja (DDS)P1462[3] Nopeussäätimen (VC) integrointiaika Min: 25Tila: CUT Tietotyyppi: U16 Yksikkö: ms Oletus: 400P-ryhmä: OHJAUS Voimassa: Heti - Maks: 32001Määrittää nopeussäätimen integrointiajan. (Kts. lohkokaavio 7510)Indeksi:P1462[0] : 1. Laiteparametridatasarja (DDS)P1462[1] : 2. Laiteparametridatasarja (DDS)P1462[2] : 3. Laiteparametridatasarja (DDS)P1470[3] Nopeussäätimen (SLVC) vahvistus Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: - Oletus: 3.0P-ryhmä: OHJAUS Voimassa: Heti - Maks: 2000.0Taso:2Taso:2Taso:2Määrittää nopeussäätimen vahvistuksen. (Kts. lohkokaavio 7500)Indeksi:P1470[0] : 1. Laiteparametridatasarja (DDS)P1470[1] : 2. Laiteparametridatasarja (DDS)P1470[2] : 3. Laiteparametridatasarja (DDS)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200593
P1472[3] Nopeussäätimen (SLVC) integrointiaika Min: 25Tila: CUT Tietotyyppi: U16 Yksikkö: ms Oletus: 400P-ryhmä: OHJAUS Voimassa: Heti - Maks: 32001Taso:2Määrittää nopeussäätimen integrointiajan. (Kts. lohkokaavio 7500)Indeksi:P1472[0] : 1. Laiteparametridatasarja (DDS)P1472[1] : 2. Laiteparametridatasarja (DDS)P1472[2] : 3. Laiteparametridatasarja (DDS)P1500[3] Momenttiohjearvon valinta Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: OHJAUS Voimassa: Vahvista Pikakäyttöönotto Maks: 77Taso:2Valitsee momenttiohjearvon lähteen. Alla olevassa taulukossa mahdollisista asetuksista, pääohjearvovalitaan vähiten merkitsevistä numeroista (0 – 7) ja lisäohjearvot eniten merkitsevistä numeroista (x0 – x6).Esimerkki:Asettamalla 12 valitaan pääohjearvoksi (2) analogitulo lisäohjearvolla (1), joka tulee näppäimistöltä(moottoripotentiometrin ohjearvo). Yksittäiset numerot ovat pääohjearvoja ilman lisäohjearvoa.Asetukset:Käytä alla olevaa taulukkoa valitaksesi muita asetuksia, mukaan lukien lisäohjearvo.0 Ei pääohjearvoa2 Analoginen ohjearvo4 USS BOP-liitännästä5 USS COM-liitännästä6 CB COM-liitännästäMahdolliset arvot:0 Ei pääohjearvoa2 Analoginen ohjearvo4 USS BOP-liitännästä5 USS COM-liitännästä6 CB COM-liitännästä7 Analoginen ohjearvo 220 Ei pääohjearvoa + Analoginen ohjearvo21 MOP-ohjearvo + Analoginen ohjearvo22 Analoginen ohjearvo + Analoginen ohjearvo23 Kiinteä taajuus + Analoginen ohjearvo24 USS BOP-liitännästä + Analoginen ohjearvo25 USS COM-liitännästä + Analoginen ohjearvo26 CB COM-liitännästä + Analoginen ohjearvo27 Analoginen ohjearvo 2 + Analoginen ohjearvo40 Ei pääohjearvoa + USS BOP-liitännästä41 MOP-ohjearvo + USS BOP-liitännästä42 Analoginen ohjearvo + USS BOP-liitännästä43 Kiinteä taajuus + USS BOP-liitännästä44 USS BOP-liitännästä + USS BOP-liitännästä45 USS COM-liitännästä + USS BOP-liitännästä46 CB COM-liitännästä + USS BOP-liitännästä47 Analoginen ohjearvo 2 + USS BOP-liitännästä50 Ei pääohjearvoa + USS COM-liitännästä51 MOP-ohjearvo + USS COM-liitännästä52 Analoginen ohjearvo + USS COM-liitännästä53 Kiinteä taajuus + USS COM-liitännästä54 USS BOP-liitännästä + USS COM-liitännästä55 USS COM-liitännästä + USS COM-liitännästä56 CB COM-liitännästä + USS COM-liitännästä57 Analoginen ohjearvo 2 + USS COM-liitännästä60 Ei pääohjearvoa + CB COM-liitännästä61 MOP-ohjearvo + CB COM-liitännästä62 Analoginen ohjearvo + CB COM-liitännästä63 Kiinteä taajuus + CB COM-liitännästä64 USS BOP-liitännästä + CB COM-liitännästä65 USS COM-liitännästä + CB COM-liitännästä66 CB COM-liitännästä + CB COM-liitännästä67 Analoginen ohjearvo 2 + CB COM-liitännästä70 Ei pääohjearvoa + Analoginen ohjearvo 271 MOP-ohjearvo + Analoginen ohjearvo 272 Analoginen ohjearvo + Analoginen ohjearvo 273 Kiinteä taajuus + Analoginen ohjearvo 274 USS BOP-liitännästä + Analoginen ohjearvo 275 USS COM-liitännästä + Analoginen ohjearvo 276 CB COM-liitännästä + Analoginen ohjearvo 277 Analoginen ohjearvo 2 + Analoginen ohjearvo 2Indeksi:P1500[0] : 1. Ohjausparametridatasarja (CDS)P1500[1] : 2. Ohjausparametridatasarja (CDS)P1500[2] : 3. Ohjausparametridatasarja (CDS)94MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1520[3] CO: Momentin yläraja Min: -99999.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: Nm Oletus: 5.13P-ryhmä: OHJAUS Voimassa: Heti - Maks: 99999.0Määrittää kiinteän ylärajan momentille.Indeksi:P1520[0] : 1. Laiteparametridatasarja (DDS)P1520[1] : 2. Laiteparametridatasarja (DDS)P1520[2] : 3. Laiteparametridatasarja (DDS)P1521[3] CO: Momentin alaraja Min: -99999.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: Nm Oletus: -5.13P-ryhmä: OHJAUS Voimassa: Heti - Maks: 99999.0Määrittää kiinteän alarajan momentille.Indeksi:P1521[0] : 1. Laiteparametridatasarja (DDS)P1521[1] : 2. Laiteparametridatasarja (DDS)P1521[2] : 3. Laiteparametridatasarja (DDS)P1610[3] Jatkuva momentin jännitteenlisäys (SLVC) Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 50.0P-ryhmä: OHJAUS Voimassa: Heti - Maks: 200.0Taso:2Taso:2Taso:2Asettaa jatkuvan momentin jännitteenlisäyksen anturittoman vektorisäädön (SLVC) alemmallanopeusalueella.Arvo annetaan prosentteina [%] suhteessa moottorin nimelliskuormitukseen.Indeksi:P1610[0] : 1. Laiteparametridatasarja (DDS)P1610[1] : 2. Laiteparametridatasarja (DDS)P1610[2] : 3. Laiteparametridatasarja (DDS)Huom.P1610 = 100 % vastaa moottorin nimelliskuormitustaP1611[3] Kiihdytysmomentin jännitteenlisäys (SLVC) Min: 0.0Tila: CUT Tietotyyppi: Liukuva Yksikkö: % Oletus: 0.0P-ryhmä: OHJAUS Voimassa: Heti - Maks: 200.0Taso:2Asettaa kiihdytysmomentin jännitteenlisäys anturittoman vektorisäädön (SLVC) alemmalla nopeusalueella.Arvo annetaan prosentteina [%] suhteessa moottorin nimelliskuormitukseen.Indeksi:P1611[0] : 1. Laiteparametridatasarja (DDS)P1611[1] : 2. Laiteparametridatasarja (DDS)P1611[2] : 3. Laiteparametridatasarja (DDS)Huom.P1611 = 100 % vastaa moottorin nimelliskuormitustaP1800 Kytkentätaajuus Min: 2Tila: CUT Tietotyyppi: U16 Yksikkö: kHz Oletus: 4P-ryhmä: TAAJ.MUUT. Voimassa: Heti - Maks: 16Taso:2Asettaa taajuusmuuttajan tehotransistoreiden kytkentätaajuuden. Taajuus voidaan vaihtaa 2 kHz portaissa.Jos valitaan kytkentätaajuus > 4 kHz 380-480 V yksiköissä, se vähentää moottorin suurinta jatkuvaa virtaa.Riippuvuus:Minimi kytkentätaajuus riippuu parametrien P1082 (maksimitaajuuden) ja P0310 (moottorinnimellistaajuuden) arvoista.Huom.Jos hiljainen käyntiääni ei ole ehdottoman tarpeellinen, taajuusmuuttajahäviötä ja radiotaajuisiahäiriöpäästöjä voidaan pienentää valitsemalla alhainen kytkentätaajuus.Tietyissä olosuhteissa taajuusmuuttaja voi pienentää kytkentätaajuutta ylilämpösuojauksen varmistamiseksi(ks. P0290, taso 3).MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200595
P1820[3] Lähdön vaihejärjestyksen muutos Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TAAJ.MUUT. Voimassa: Vahvista - Maks: 1Taso:2Vaihtaa moottorin pyörimissuunnan vaihtamatta ohjearvon merkkiä.Mahdolliset arvot:0 OFF1 ONIndeksi:P1820[0] : 1. Laiteparametridatasarja (DDS)P1820[1] : 2. Laiteparametridatasarja (DDS)P1820[2] : 3. Laiteparametridatasarja (DDS)Riippuvuus:Jos positiivinen ja negatiivinen pyörimissuunta on mahdollistettu, käytetään suoraa taajuusohjearvoa.Jos sekä positiivinen että negatiivinen pyörimissuunta on estetty, ohjearvoksi asetetaan 0.Lisätiedot:Ks. P1000 (taajuusohjearvon valinta)P1910 Moottoritietojen tunnistuksen valinta Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: MOOTTORI Voimassa: Vahvista Pikakäyttöönotto Maks: 20Suorittaa moottoritietojen tunnistuksen.Asetukset:P1910 = 1: Kaikki moottoritiedot* P0350 staattorivastus,* P0354 roottorivastus,* P0356 staattorin hajareaktanssi,* P0358 roottorin hajareaktanssi,* P0360 pääreaktanssimitataan ja parametri muutetaan.P1910 = 3: Kyllästyskäyrä* P0362 ... P0365 magnetointikäyrän vuo 1 .. 4* P0366 ... P0369 magnetointikäyrän imag 1 .. 4mitataan ja parametri muutetaan.Mahdolliset arvot:0 Estetty (ei mittausta)1 Kaikki parametrit mitataan ja suoritetaan parametrimuutoksia2 Kaikki parametrit mitataan muuttamatta parametrejä3 Kyllästyskäyrä mitataan ja suoritetaan parametrimuutoksia4 Kyllästyskäyrä mitataan muuttamatta parametrejä5 XsigDyn (r1920) mitataan muuttamatta parametrejä6 Tkuolo (r1926) mitataan muuttamatta parametrejä7 Rs (r1912 ) mitataan muuttamatta parametrejä8 Xs (r1915) mitataan muuttamatta parametrejä9 Tr (r1913) mitataan muuttamatta parametrejä10 Xsigma (r1914) mitataan muuttamatta parametrejä20 Aseta jännitevektoriHuom.Ennen moottoritietojen tunnistamista on suoritettava "Pikakäyttöönotto".Kun toiminto on aktivoitu (P1910 = 1), järjestelmä antaa varoituksen A0541, joka varoittaa siitä, ettämoottoriparametrien mittaus suoritetaan seuraavalla ON-komennolla.Ilmoitus:Kun valitset mittausvalitukset, huomioi:1. "parametrimuutoksella" tarkoittaa, että arvot todella otetaan käyttöön parametrin Pxxxx asetuksena (ks.tavalliset asetukset alla) ja sovelletaan taajuusmuuttajaan sekä näytetään alla olevissa lukuparametreissä.2. "muuttamatta parametrejä" tarkoittaa, että arvot vain näytetään, so. näytetään tarkistustarkoituksessalukuparametreissä r1912 (mitattu staattorivastus ), r1913 (mitattu roottorin aikavakio), r1914 (mitattuhajainduktanssi yhteensä), r1915/r1916/1917/1918/1919 (mitattu staattorin nimellisreaktanssi/ mitattustaattorin reaktanssi 1– 4) ja 1926 (mitattu modulaattorin kuolonaika). Arvot ei sovelleta taajuusmuuttajaan.r1912[3] Mitattu staattorivastus Min: -Tietotyyppi: Liukuva Yksikkö: Ohm Oletus: -P-ryhmä: MOOTTORI Maks: -Näyttää mitatun käämivastuksen arvon (vaiheiden välinen) yksikössä Ohms.Indeksi:r1912[0] : U_vaiher1912[1] : V_vaiher1912[2] : W_vaiheHuom.Tämä arvo mitataan käyttäen parametri P1910 = 1 tai 2 , so. kaikkien muutettujen/muuttamattomienparametrien tunnistus.Taso:2Taso:296MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1960[3] Nopeussäädön optimointi Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: MOOTTORI Voimassa: Vahvista Maks: 1Taso:3Taajuusmuuttaja tulee olla vektorisäädöllä (P1300=20 tai 21) nopeussäädön optimoinnin onnistuessa. Kunoptimointi aktivoidaan (P1960=1) tulee näytölle varoitus A0542. Taajuusmuuttaja tekee optimoinnintestauksen käyntikäskyn saatuaan.Mahdolliset arvot:0 Estetty1 AktivoituHuom.Testauksen päätyttyä P1960 palautuu nollaksi.P2000[3] Referenssitaajuus Min: 1.00Tila: CT Tietotyyppi: Liukuva Yksikkö: Hz Oletus: 50.00P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 650.00Sarjaväylän, analogi I/O:n ja PID-säätäjän käyttämä koknaisohje,vastaa lukua 4000Hex.Tehdasasetus: 50Hz = 100% = 400Hex.P2000[0] : 1. Laiteparametridatasarja (DDS)P2000[1] : 2. Laiteparametridatasarja (DDS)P2000[2] : 3. Laiteparametridatasarja (DDS)P2001[3] Referenssijännite Min: 10Tila: CT Tietotyyppi: U16 Yksikkö: V Oletus: 1000P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 2000Kokonaislähtöjännite (100 % ) sarjaväylästä (vastaa 4000Hex).Tehdasasetus: 1000V = 100% = 400Hex.Esimerkki:P0201 = 230 määrittää, että 4000H vastaanotettu USS:n kautta merkitsee 230 V.Indeksi:P2001[0] : 1. Laiteparametridatasarja (DDS)P2001[1] : 2. Laiteparametridatasarja (DDS)P2001[2] : 3. Laiteparametridatasarja (DDS)P2002[3] Referenssivirta Min: 0.10Tila: CT Tietotyyppi: Liukuva Yksikkö: A Oletus: 0.10P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 10000.00Kokonaislähtövirta sarjaväylästä (vastaa 4000Hex).Tehdasasetus: 2 x moottorivirta = 100% = 400Hex.Indeksi:P2002[0] : 1. Laiteparametridatasarja (DDS)P2002[1] : 2. Laiteparametridatasarja (DDS)P2002[2] : 3. Laiteparametridatasarja (DDS)P2003[3] Referenssimomentti Min: 0.10Tila: CT Tietotyyppi: Liukuva Yksikkö: Nm Oletus: 0.75P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 99999.00Kokonaisreferenssimomentti sarjaväylästä (vastaa 4000Hex).Tehdasasetus: 2 x moottorimomentti = 100% = 400Hex.Indeksi:P2003[0] : 1. Laiteparametridatasarja (DDS)P2003[1] : 2. Laiteparametridatasarja (DDS)P2003[2] : 3. Laiteparametridatasarja (DDS)r2004[3] Referenssiteho Min: -Tietotyyppi: Liukuva Yksikkö: - Oletus: -P-ryhmä: KÄYT.OTTO Maks: -Taso:2Taso:3Taso:3Taso:3Taso:3Kokonaisreferenssiteho sarjaväylästä (vastaa 4000Hz).Tehdasasetus: 2 x moottoriteho = 100% = 400Hex.Indeksi:r2004[0] : 1. Laiteparametridatasarja (DDS)r2004[1] : 2. Laiteparametridatasarja (DDS)r2004[2] : 3. Laiteparametridatasarja (DDS)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200597
P2010[2] USS siirtonopeus Min: 4Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 6P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 12Määrittää USS-tietoliikenteessä käytettävän siirtonopeuden.Mahdolliset arvot:4 2400 baudia5 4800 baudia6 9600 baudia7 19200 baudia8 38400 baudia9 57600 baudia10 76800 baudia11 93750 baudia12 115200 baudiaIndeksi:P2010[0] : Sarjaliitäntä COM-liitännästäP2010[1] : Sarjaliitäntä BOP-liitännästäP2011[2] USS-osoite Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 31Taso:2Taso:2Asettaa taajuusmuuttajalle yksilöllisen osoitteen.Indeksi:P2011[0] : Sarjaliitäntä COM-liitännästäP2011[1] : Sarjaliitäntä BOP-liitännästäHuom.Voit lisäksi kytkeä jopa 30 taajuusmuuttajaa yhteen sarjaliitännän kautta (so. 31 taajuusmuuttajaa yhteensä)ja käyttää USS-sarjaväyläprotokollan niiden ohjaamiseen.P2012[2] USS:n PZD-pituus Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 2P-ryhmä: KÄYT.OTTO Voimassa: Vahvista - Maks: 8Määrittää 16-bittisten sanojen määrän PZD-osassa USS-sähkeessä. PZD-osa USS-sähkeestä käytetäänpääohjearvon määrittämiseen ja taajuusmuuttajan ohjaamiseen.Indeksi:P2012[0] : Sarjaliitäntä COM-liitännästäP2012[1] : Sarjaliitäntä BOP-liitännästäP2100[3] Häiriötilanteen reaktio Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: HÄLYTYKSET Voimassa: Vahvista - Maks: 65535Valitsee jopa 3 häiriötä tai varoitusta oletuksista poikkeaville reaktioille.Indeksi:P2100[0] : Vikanumero 1P2100[1] : Vikanumero 2P2100[2] : Vikanumero 3Esimerkki:Jos haluat parametrin F0005 suorittavan OFF3-komennon OFF2-komennon sijasta, aseta parametriP2100[0] = 5, valitse sitten haluttu reaktio parametrissä P2101[0] (tässä tapauksessa, aseta P2101[0] = 3).Huom.Kaikilla häiriökoodeilla on oletusreaktio OFF2-komennolle. Jotkut laitteistohäiriöiden aiheuttamienhäiriökoodien (esim. ylivirta) oletusreaktioita ei pysty muuttamaan.Taso:3Taso:398MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P2101[3] Stop-reaktion arvo Min: 0Tila: CT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: HÄLYTYKSET Voimassa: Vahvista - Maks: 4Taso:3Asettaa taajuusmuuttajan stop-reaktion arvot parametrissä P2100 (häiriötilanteen reaktio) valituille häiriöille.Tämä indeksoitu parametri määrittää eritellyn reaktion parametrin P2100 indekseissä 0 – 2 määritellyillehäiriöille/virheille.Mahdolliset arvot:0 Ei reaktiota, ei näyttöä1 OFF1 stop-reaktio2 OFF2 stop-reaktio3 OFF3 stop-reaktio4 Ei reaktiota, vain varoitusIndeksi:P2101[0] : Stop-reaktion arvo 1P2101[1] : Stop-reaktion arvo 2P2101[2] : Stop-reaktion arvo 3Huom.Asetukset 0 – 3 voidaan asettaa ainoastaan häiriökoodeille.Asetukset 0 ja 4 voidaan asettaa ainoastaan varoituksille.Indeksi 0 (P2101) viittaa indeksissä 0 (P2100) oleviin häiriöihin/virheisiin.P2200[3] BI: Aktivoi PID-säädin Min: 0:0Tila: CT Tietotyyppi: U32 Yksikkö: - Oletus: 0:0P-ryhmä: TEKN Voimassa: Vahvista - Maks: 4000:0Taso:2PID-säätömuoto. Sallii käyttäjän aktivoida/estää PID-säätimen. Suljetun silmukan PID-säädin saadaanaktivoiduksi asettamalla 1.Indeksi:P2200[0] : 1. Ohjausparametridatasarja (CDS)P2200[1] : 2. Ohjausparametridatasarja (CDS)P2200[2] : 3. Ohjausparametridatasarja (CDS)Riippuvuus:Kun PID-säädin on aktivoitu, normaalit kiihdytys- ja jarrutusajat (asetettu parametreissä P1120 ja P1121)estetään automaattisesti, samoin normaalit taajuusohjearvot.OFF1- tai OFF3-komennon jälkeen taajuusmuuttajan lähtötaajuus jarrutetaan kuitenkin pysähdykseenkäyttäen parametrissä P1121 (P1135 OFF3-komennolle) asetettu ramppiaika.Huom.PID-ohjearvon lähde valitaan parametrillä P2253. PID-ohjearvo ja PID-takaisinkytkennän signaali tulkitaanprosenttiarvoiksi (ei Hz). PID-säätimen lähtö näytetään prosenttiarvona ja normalisoidaan sitten hertseiksi[Hz] parametrin P2000 (vertailutaajuus) avulla, kun PID-säädin on aktivoitu.Käyttäjätasolla 3, PID-säätimen lähteen aktivointi voi tulla myös digitaalisista tuloista asetuksilla 722.0 –722.2 digitaalisille tuloille DIN1 – DIN3 tai mistä tahansa muusta BiCo-lähteestä.Ilmoitus:Moottorin minimi- ja maksimitaajuus (parametrit P1080 ja P1082) sekä ohitustaajuudet (parametrit P1091 –P1094) ovat silti voimassa taajuusmuuttajan lähdössä. Ohitustaajuuksien aktivoiminen silloin, kun PIDsäädinon aktivoitu, voi kuitenkin aiheuttaa epävakautta.P2800 Vapaasti ohjelmoitavat lohkot Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TEKN Voimassa: Vahvista - Maks: 1Taso:3Vapaasti ohjelmoitavat lohkot (FFB) aktivoidaan kaksivaiheisesti.1. Parametri P2800 aktivoi lohkot, normally (P2800 = 1).2. Parametrit P2801 ja P2802 aktivoivat lohkot yksilöllisesti (P2801[x] > 0 tai P2802[x] > 0).Mahdolliset arvot:0 Estetty1 AktivoituRiippuvuus:Kaikki aktiiviset lohkot lasketaan 132 ms välein.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/200599
P2801[17] Vapaasti ohjelmoitavat lohkot Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TEKN Voimassa: Vahvista - Maks: 3Taso:3Vapaasti ohjelmoitavat lohkot (FFB) aktivoidaan kaksivaiheisesti.1. Parametri P2800 aktivoi lohkot, normally (P2800 = 1).2. Parametrit P2801 ja P2802 aktivoivat lohkot yksilöllisesti (P2801[x] > 0 tai P2802[x] > 0).Lisäksi, parametrit P2801 ja P2802 määrittävät lohkot kronologisessa järjestyksessä. Seuraava taulukkoosoittaa priorisointijärjestyksen vasemmalta oikealle ja alhaalta ylös.Level 3Level 2Level 1Not active 0P2802 [13] CMP 2P2802 [12] CMP 1P2802 [11] DIV 2P2802 [10] DIV 1P2802 [9] MUL 2P2802 [8] MUL 1P2802 [7] SUB 2P2802 [6] SUB 1P2802 [5] ADD 2P2802 [4] ADD 1P2802 [3] Timer 4P2802 [2] Timer 3P2802 [1] Timer 2P2802 [0] Timer 1P2801 [16] RS-FF 3P2801 [15] RS-FF 2P2801 [14] RS-FF 1P2801 [13] D-FF 2P2801 [12] D-FF 1P2801 [11] NOT 3P2801 [10] NOT 2P2801 [9] NOT 1P2801 [8] XOR 3P2801 [7] XOR 2P2801 [6] XOR 1P2801 [5] OR 3P2801 [4] OR 2P2801 [3] OR 1P2801 [2] AND 3P2801 [1] AND 2P2801 [0] AND 1Mahdolliset arvot:0 Estetty1 Taso 1 (Level 1)2 Taso 2 (Level 2)3 Taso 3 (Level 3)Indeksit:P2801[0] : Enable AND 1P2801[1] : Enable AND 2P2801[2] : Enable AND 3P2801[3] : Enable OR 1P2801[4] : Enable OR 2P2801[5] : Enable OR 3P2801[6] : Enable XOR 1P2801[7] : Enable XOR 2P2801[8] : Enable XOR 3P2801[9] : Enable NOT 1P2801[10] : Enable NOT 2P2801[11] : Enable NOT 3P2801[12] : Enable D-FF 1P2801[13] : Enable D-FF 2P2801[14] : Enable RS-FF 1P2801[15] : Enable RS-FF 2P2801[16] : Enable RS-FF 3Esimerkki:P2801[3] = 2, P2801[4] = 2, P2802[3] = 3, P2802[4] = 2Lohkot toimivat seuraavassa järjestyksessä:P2802[3], P2801[3] , P2801[4], P2802[4]Riippuvuus:Aktivoi lohkot asettamalla P2800=1.Kaikki aktiiviset lohkot lasketaan 132 ms välein.100MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P2802[14] Vapaasti ohjelmoitavat lohkot Min: 0Tila: CUT Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: TEKN Voimassa: Vahvista - Maks: 3Taso:3Vapaasti ohjelmoitavat lohkot (FFB) aktivoidaan kaksivaiheisesti.1. Parametri P2800 aktivoi lohkot, normally (P2800 = 1).2. Parametrit P2801 ja P2802 aktivoivat lohkot yksilöllisesti (P2801[x] > 0 tai P2802[x] > 0).Lisäksi, parametrit P2801 ja P2802 määrittävät lohkot kronologisessa järjestyksessä. Seuraava taulukkoosoittaa priorisointijärjestyksen vasemmalta oikealle ja alhaalta ylös.Level 3Level 2Level 1Not active 0P2802 [13] CMP 2P2802 [12] CMP 1P2802 [11] DIV 2P2802 [10] DIV 1P2802 [9] MUL 2P2802 [8] MUL 1P2802 [7] SUB 2P2802 [6] SUB 1P2802 [5] ADD 2P2802 [4] ADD 1P2802 [3] Timer 4P2802 [2] Timer 3P2802 [1] Timer 2P2802 [0] Timer 1P2801 [16] RS-FF 3P2801 [15] RS-FF 2P2801 [14] RS-FF 1P2801 [13] D-FF 2P2801 [12] D-FF 1P2801 [11] NOT 3P2801 [10] NOT 2P2801 [9] NOT 1P2801 [8] XOR 3P2801 [7] XOR 2P2801 [6] XOR 1P2801 [5] OR 3P2801 [4] OR 2P2801 [3] OR 1P2801 [2] AND 3P2801 [1] AND 2P2801 [0] AND 1Mahdolliset arvot:0 Estetty1 Taso 1 (Level 1)2 Taso 2 (Level 2)3 Taso 3 (Level 3)Indeksit:P2801[0] : Enable AND 1P2801[1] : Enable AND 2P2801[2] : Enable AND 3P2801[3] : Enable OR 1P2801[4] : Enable OR 2P2801[5] : Enable OR 3P2801[6] : Enable XOR 1P2801[7] : Enable XOR 2P2801[8] : Enable XOR 3P2801[9] : Enable NOT 1P2801[10] : Enable NOT 2P2801[11] : Enable NOT 3P2801[12] : Enable D-FF 1P2801[13] : Enable D-FF 2P2801[14] : Enable RS-FF 1P2801[15] : Enable RS-FF 2P2801[16] : Enable RS-FF 3Esimerkki:P2801[3] = 2, P2801[4] = 2, P2802[3] = 3, P2802[4] = 2Lohkot toimivat seuraavassa järjestyksessä:P2802[3], P2801[3] , P2801[4], P2802[4]Riippuvuus:Aktivoi lohkot asettamalla P2800=1.Kaikki aktiiviset lohkot lasketaan 132 ms välein.MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005101
P3900 Pikakäyttöönoton lopetus Min: 0Tila: C Tietotyyppi: U16 Yksikkö: - Oletus: 0P-ryhmä: PIKA Voimassa: Vahvista Pikakäyttöönotto Maks: 3Taso:1Suorittaa moottorin optimaalisen toiminnan edellyttämät laskennat.Laskentojen päätymisen jälkeen parametrit P3900 ja P0010 (käyttöönoton parametriryhmät) palautetaanautomaattisesti alkuarvoon 0.Mahdolliset arvot:0 Ei pikakäyttöönottoa1 Aloita pikakäyttöönotto tehdasasetusten palautuksella2 Aloita pikakäyttöönotto3 Aloita pikakäyttöönotto, suoritetaan vain moottorilaskennatRiippuvuus:Tätä parametriä voidaan muuttaa vain, kun P0010 = 1 (pikakäyttöönotto)Huom.Kun valitaan asetus 1, ainoastaan parametriasetukset, jotka kuuluvat käyttöönottovalikkoon"Pikakäyttöönotto" säilytetään; kaikki muut parametrimuutokset, mukaan lukien I/O-asetukset, menetetään.Myös moottorilaskennat suoritetaan.Kun valitaan asetus 2, ainoastaan parametrit jotka ovat riippuvaisia parametreistä käyttöönottovalikossa"Pikakäyttöönotto" (P0010 = 1) lasketaan. I/O-asetukset palautetaan myös oletusarvoihinsa jamoottorilaskennat suoritetaan.Kun valitaan asetus 3, ainoastaan moottori- ja säädinlaskennat suoritetaan. Lopettamalla pikakäyttöönottotällä asetuksella säästää aikaa (esim. jos on muutettu ainoastaan moottorin arvokilven tiedot).Laskee erilaisia moottoriparametrejä ja korvaa aiemmat arvot. Näihin kuuluvat parametrit P0344 (Taso 3,moottorin paino), P0350 (Taso 3, demagnetointiaika), P2000 (vertailutaajuus), P2002 (Taso 3, vertailuvirta).102MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
4. LohkokaaviotSetpoint channel Motor control Modulator5000 5200 53006100V/f control5000SUM setpointSpeed / torquecontrolMotor modelCurrentcontrolSUM/JOGselectionAFMRFGMOD5100PID controllerFlux setpoint7500 - 77007800 79007900Motor identificationMotor and inverter protection, Adaption of motor parametersSequence controlParameterization4561100_Overview.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 1100 -Technologyfunctions4100 - 4180MonitoringBrakingRestartFlying Restart4600Vdc Control4600Vdc_minControl (KIB)Positioningramp down4800 - 4830Free functionblocks3InternalsetpointsourceJOGMOP3100FF3200FixedPID setpoint3300PIDMOP34002ExternalinterfacesDIN2000DOUT2100ADC2200DAC2300BOP24002500 - 2510USSBOP link2600 - 2610USSCOM link2700 - 2710CBCOM linkEncoder1OverviewGeneral OverviewMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005103
Sequencecontrol8- 1200 -SUMPIDcontrollerJOG frequency ->0.00 ... 650.00 [Hz]P1058.D (5.00)JOG frequency P1055.C(0:0)BI: Enable JOG
8- 2000 -&&&&CO/BO: Bin.inp.valr0722r0722r0722r0722r0722r0722r0722.0.1.2.3.4.5&&7Function diagramMICROMASTER <strong>440</strong>PNP/NPN DIN0 ... 1P0725 (1)24 V Debounce time: DIN0 ... 3P0724 (3)024 VT 010 V24 V Debounce time: DIN0 ... 3P0724 (3)024 VT 0124 V Debounce time: DIN0 ... 30 VP0724 (3)024 VT 010 V24 V Debounce time: DIN0 ... 3P0724 (3)024 VT 0124 V Debounce time: DIN0 V0 ... 3P0724 (3)024 VT 010 V24 V Debounce time: DIN0 ... 3P0724 (3)024 VT 010 V34562000_DIN.vsd03.09.2003 V2.02KL5KL6KL7KL8KL16KL17P24(KL9)or0 V(KL28)1External InterfacesDigital InputsMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005105
8- 2100 -7Function diagramMICROMASTER <strong>440</strong>COMNONCKl.20Kl.19Kl.18COM Kl.22NOKl.21COMNONCKl.25Kl.24Kl.2362100_DOUT.vsd03.09.2003 V2.0Invert DOUTs0 ... 7P0748 (0) CO/BO: State DOUTs0r0747r0747.01-1Invert DOUTs0 ... 7P0748 (0) CO/BO: State DOUTs0r0747r0747.12-1Invert DOUTs0 ... 7P0748 (0) CO/BO: State DOUTs0r0747r0747.24-145BI: Fct. of DOUT 1P0731.C(52:3)BI: Fct. of DOUT 2P0732.C(52:7)BI: Fct. of DOUT 3P0733.C(0:0)321External InterfacesDigital Outputs106MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Type of ADC0 ... 4P0756 [2] (0)Value x1:ADC scal.-20 ... 20P0757 [2] (0)Value x2:ADC scal.-20 ... 20P0759 [2] (10)ADC deadband width0 ... 20P0761 [2] (0)%100 %Value y2:ADC scal.-99999.9 ... 99999.9 [%]P0760 [2] (100.0)ADC after scal.[%] [%]r0754 [2]10 V or 20 mAValue y1:ADC scal.-99999.9 ... 99999.9 [%]P0758 [2] (0.0)ASP4000 hmaxy 2y 1x d x 1ASP minx 210 V20 mAx 100%VmACO:ADC scal[4000h]r0755 [2]DigitVolts ormAAct.ADC inp.[V/mA]r0752 [2]Type of ADC0 ... 4P0756 [2] (0)50 % of P0761Delay on sig. loss0 ... 10000 [ms]P0762 [2] (10)1,3TWarning, signal lost(F0080)101.73.9VCO/BO: Bin.inp.valr0722r0722 .6r0722 .74562200_ADC.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 2200 -Smooth time ADC0 ... 10000 [ms]P0753 [2] (3)3Type of ADC0 ... 4P0756 [2] (0)Analog inputA SwitchingDbipolarunipolar12External InterfacesAnalog Input (ADC)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005107
Type of DAC0 ... 1P0776 [2] (0)DAC deadband width0 ... 20P0781 [2] (0)Value x1:DAC scal.-99999.0 ... 99999.0 [%]P0777 [2] (0.0)Value x2:DAC scal.-99999.0 ... 99999.0 [%]P0779 [2] (100.0)mA20 mA4000 h 20 mAy 1y 2y 100%%P0781DAct. DAC value[mA]r0774 [2]Analog outputx 1x 2 x 20mA 100 %A4562300_DAC.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 2300 -3Value y2:DAC scal.0 ... 20P0780 [2] (20)Value y1:DAC scal.0 ... 20P0778 [2] (0)x(t)Smooth time DAC0 ... 1000 [ms]P0773 [2] (2)CI: DACP0771 [2](21:0)12External InterfacesAnalog Output (DAC)108MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Note:Activation of the raise and lower keys is only effective if the operating display (r0000)is selected, a changeover to the value display has taken place with the toggle key and theunit is in the "Operation" status.CO/BO: BOP CtrlWdRaise motor potentiometerfrom BOP.D.Dr0019r0019CO/BO: BOP CtrlWdLower motor potentiometerfrom BOP.E.Er0019r0019Toggle key to operatingsystem, fault acknowledgementto control word 1Toggle key to operatingsystem, fault acknowledgementto control word 1Actuation of sevensegmentdisplayCO/BO: BOP CtrlWdPositive direction ofrotation from BOP.B.Br0019r0019QSET(Q=1)1&POWER ONPriority1 RESET2 SETQRESET(Q=0)&CO/BO: BOP CtrlWd1Set commandON/OFF1, OFF2, OFF3from BOP.1.1r0019r0019QSET(Q=1)Priority1 RESET2 SETQRESET(Q=0)1Reset commandPOWER ON8- 2400 -7Function diagramMICROMASTER <strong>440</strong>62400_BOP.vsd03.09.2003 V2.0Operating display (r0000)selected and operation=1of sequence control05 V05 V01015 VFn5 VP5 V5 V15 V05FnPjog104Basic Operator Panel BOPSeven-segment displayRaise keyToggle keyReversing keyON keyOFF keyJOG keyProgram keyLower key123External InterfacesBasic Operator Panel (BOP)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005109
8- 2500 -Bit00 ON/OFF1Bit01 OFF2: Electrical stopBit02 OFF3: Fast stopBit03 Pulse enableBit04 RFG enableBit05 RFG startBit06 Setpoint enableBit07 Fault acknowledgeBit08 JOG rightBit09 JOG leftBit10 Control from PLCBit11 Reverse (setpoint inversion)Bit13 Motor potentiometer MOP upBit14 Motor potentiometer MOP downBit15 CDS Bit 0 (Local/Remote)Bit00 Fixed frequency Bit 0Bit01 Fixed frequency Bit 1Bit02 Fixed frequency Bit 2Bit03 Fixed frequency Bit 3Bit04 Drive data set (DDS) Bit 0Bit05 Drive data set (DDS) Bit 1Bit08 PID enabledBit09 DC brake enabledBit11 DroopBit12 Torque controlBit13 External fault 1Bit15 Command data set (CDS) Bit 17Function diagramMICROMASTER <strong>440</strong>BO: CtrlWd1
TxDLGE STXUSSconfiguration8- 2510 -TransmitTransmit telegramPZDBCC7 6 5 4 3 2 1PKW ADR0Bit2 = 1Change par. via0 ... 15P0927 (15)USS baudrate4 ... 12P2010 [2] (6)USS address0 ... 31P2011 [2] (0)All parameters:Index = 1=> BOP linkUSS PZD length0 ... 8P2012 [2] (2)USS PKW length0 ... 127P2013 [2] (127)USS telegram T_off0 ... 65535 [ms]P2014 [2] (0)62510_USSonBOP.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>PKWPZD012345675P2016[0][1][2][3][4][5][6][7]Note:P2016[0] = 52P2016[1] = 21P2016[3] = 53are default settings4CO/BO: Act StatWd1r0052r0052CO: Act. fil. freq [Hz]r0021CO/BO: Act StatWd2r0053r00533Bit00 Drive readyBit01 Drive ready to runBit02 Drive runningBit03 Drive fault activeBit04 OFF2 activeBit05 OFF3 activeBit06 ON inhibit activeBit07 Drive warning activeBit08 Deviation setpoint / act. valueBit09 PZD controlBit10 Maximum frequency reachedBit11 Warning: Motor currentBit12 Motor holding brake activeBit13 Motor overloadBit14 Motor runs rightBit15 Inverter overloadBit00 DC brake activeBit01 Act. freq. r0021 > P2167 (f_off)Bit02 Act. freq. r0021 > P1080 (f_min)Bit03 Act. current r0027 >= P2170Bit04 Act. freq. r0021 >= P2155 (f_1)Bit05 Act. freq. r0021 < P2155 (f_1)Bit06 Act. freq. r0021 >= setpointBit07 Act. Vdc r0026 < P2172Bit08 Act. Vdc r0026 > P2172Bit09 Ramping finishedBit10 PID output r2294 == P2292 (PID_min)Bit11 PID output r2294 == P2291 (PID_max)Bit14 Download data set 0 from AOPBit15 Download data set 1 from AOP12External InterfacesUSS on BOP link, TransmittingMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005111
Bit00 ON/OFF1Bit01 OFF2: Electrical stopBit02 OFF3: Fast stopBit03 Pulse enableBit04 RFG enableBit05 RFG startBit06 Setpoint enableBit07 Fault acknowledgeBit08 JOG rightBit09 JOG leftBit10 Control from PLCBit11 Reverse (setpoint inversion)Bit13 Motor potentiometer MOP upBit14 Motor potentiometer MOP downBit15 CDS Bit 0 (Local/Remote)Bit00 Fixed frequency Bit 0Bit01 Fixed frequency Bit 1Bit02 Fixed frequency Bit 2Bit03 Fixed frequency Bit 3Bit04 Drive data set (DDS) Bit 0Bit05 Drive data set (DDS) Bit 1Bit08 PID enabledBit09 DC brake enabledBit11 DroopBit12 Torque controlBit13 External fault 1Bit15 Command data set (CDS) Bit 17Function diagramMICROMASTER <strong>440</strong>8- 2600 -BO: CtrlWd1
TxDLGE STXUSSconfiguration8- 2610 -TransmitTransmit telegramPZDBCC7 6 5 4 3 2 1PKW ADR0Bit3 = 1Change par. via0 ... 15P0927 (15)USS baudrate4 ... 12P2010 [2] (6)USS address0 ... 31P2011 [2] (0)All parameters:Index = 0=> COM linkUSS PZD length0 ... 8P2012 [2] (2)USS PKW length0 ... 127P2013 [2] (127)USS telegram T_off0 ... 65535 [ms]P2014 [2] (0)62610_USSonCOM.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>PKWPZD012345675P2019[0][1][2][3][4][5][6][7]Note:P2019[0] = 52P2019[1] = 21P2019[3] = 53are default settings4CO/BO: Act StatWd1r0052r0052CO: Act. fil. freq [Hz]r0021CO/BO: Act StatWd2r0053r00533Bit00 Drive readyBit01 Drive ready to runBit02 Drive runningBit03 Drive fault activeBit04 OFF2 activeBit05 OFF3 activeBit06 ON inhibit activeBit07 Drive warning activeBit08 Deviation setpoint / act. valueBit09 PZD controlBit10 Maximum frequency reachedBit11 Warning: Motor currentBit12 Motor holding brake activeBit13 Motor overloadBit14 Motor runs rightBit15 Inverter overloadBit00 DC brake activeBit01 Act. freq. r0021 > P2167 (f_off)Bit02 Act. freq. r0021 > P1080 (f_min)Bit03 Act. current r0027 >= P2170Bit04 Act. freq. r0021 >= P2155 (f_1)Bit05 Act. freq. r0021 < P2155 (f_1)Bit06 Act. freq. r0021 >= setpointBit07 Act. Vdc r0026 < P2172Bit08 Act. Vdc r0026 > P2172Bit09 Ramping finishedBit10 PID output r2294 == P2292 (PID_min)Bit11 PID output r2294 == P2291 (PID_max)Bit14 Download data set 0 from AOPBit15 Download data set 1 from AOP12External InterfacesUSS on COM link, TransmittingMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005113
8- 2700 -Bit00 ON/OFF1Bit01 OFF2: Electrical stopBit02 OFF3: Fast stopBit03 Pulse enableBit04 RFG enableBit05 RFG startBit06 Setpoint enableBit07 Fault acknowledgeBit08 JOG rightBit09 JOG leftBit10 Control from PLCBit11 Reverse (setpoint inversion)Bit13 Motor potentiometer MOP upBit14 Motor potentiometer MOP downBit15 CDS Bit 0 (Local/Remote)Bit00 Fixed frequency Bit 0Bit01 Fixed frequency Bit 1Bit02 Fixed frequency Bit 2Bit03 Fixed frequency Bit 3Bit04 Drive data set (DDS) Bit 0Bit05 Drive data set (DDS) Bit 1Bit08 PID enabledBit09 DC brake enabledBit11 DroopBit12 Torque controlBit13 External fault 1Bit15 Command data set (CDS) Bit 17Function diagramMICROMASTER <strong>440</strong>BO: CtrlWd1
TxDCB-FrameCBconfiguration8- 2710 -TransmitTransmit telegramPZDCB-FramePKW7 6 5 4 3 2 1 0Bit0 = 1Change par. via0 ... 15P0927 (15)CB tel. off time0 ... 65535 [ms]P2040 (20)CB parameter0 ... 65535P2041 [5] (0)62710_CBonCOM.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>PKWPZD012345675P2051[0][1][2][3][4][5][6][7]Note:P2051[0] = 52P2051[1] = 21P2051[3] = 53are default settings4CO/BO: Act StatWd1r0052r0052CO: Act. fil. freq [Hz]r0021CO/BO: Act StatWd2r0053r00533Bit00 Drive readyBit01 Drive ready to runBit02 Drive runningBit03 Drive fault activeBit04 OFF2 activeBit05 OFF3 activeBit06 ON inhibit activeBit07 Drive warning activeBit08 Deviation setpoint / act. valueBit09 PZD controlBit10 Maximum frequency reachedBit11 Warning: Motor currentBit12 Motor holding brake activeBit13 Motor overloadBit14 Motor runs rightBit15 Inverter overloadBit00 DC brake activeBit01 Act. freq. r0021 > P2167 (f_off)Bit02 Act. freq. r0021 > P1080 (f_min)Bit03 Act. current r0027 >= P2170Bit04 Act. freq. r0021 >= P2155 (f_1)Bit05 Act. freq. r0021 < P2155 (f_1)Bit06 Act. freq. r0021 >= setpointBit07 Act. Vdc r0026 < P2172Bit08 Act. Vdc r0026 > P2172Bit09 Ramping finishedBit10 PID output r2294 == P2292 (PID_min)Bit11 PID output r2294 == P2291 (PID_max)Bit14 Download data set 0 from AOPBit15 Download data set 1 from AOP12External InterfacesCB on COM link, TransmittingMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005115
Inh. neg. MOP setp0 ... 1P1032 (1)1CO: MOP outp.freq.r105007Function diagramMICROMASTER <strong>440</strong>8- 3100 -BI: ON/OFF1P0840.C(722:0)BI: Enable MOP(UP)P1035.C(19:13)BI:Enable MOP(DWN)P1036.C(19:14)MOP setpoint-650.00 ... 650.00 [Hz]P1040.D (5.00)MOP output start valuecontrolMOP setp. memory0 ... 1P1031.D (0)0 0Max. frequency0.00 ... 650.00 [Hz]P1082.D (50.00) MOPRFG-10 11 0&1 1123456Internal Setpoint SourceMotor Potentiometer (MOP)3100_MOP.vsd03.09.2003 V2.0116MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
ON/OFF1CO: Act. FFr10248- 3200 -1FF mode - Bit 11 ... 3P1017 (1)21FF mode - Bit 31 ... 3P1019 (1)21FF mode - Bit 51 ... 2P1027 (1)217Function diagramMICROMASTER <strong>440</strong>FF mode - Bit 01 ... 3P1016 (1)201FF mode - Bit 21 ... 3P1018 (1)0201FF mode - Bit 41 ... 2P1025 (1)02010+ + + + +563200_FF.vsd03.09.2003 V2.0Fixed frequency 1-650.00 ... 650.00 [Hz]P1001.D (0.00)0 01Fixed frequency 2-650.00 ... 650.00 [Hz]P1002.D (5.00)0 01Fixed frequency 3-650.00 ... 650.00 [Hz]P1003.D (10.00)0 01Fixed frequency 4-650.00 ... 650.00 [Hz]P1004.D (15.00)0 01Fixed frequency 5-650.00 ... 650.00 [Hz]P1005.D (20.00)0 01Fixed frequency 6-650.00 ... 650.00 [Hz]P1006.D (25.00)0 0134(P1016 - P1019, P1025, P1027 = 1 or 2)BI: FF sel. Bit 0P1020.C(0:0)FF mode - Bit 01 ... 3P1016 (1)0 31,2BI: FF sel. Bit 1P1021.C(0:0)FF mode - Bit 11 ... 3P1017 (1)0 31,2BI: FF sel. Bit 2P1022.C(0:0)FF mode - Bit 21 ... 3P1018 (1)0 31,2BI: FF sel. Bit 3P1023.C(722:3)FF mode - Bit 31 ... 3P1019 (1)0 31,2BI: FF sel. Bit 4P1026.C(722:4)FF mode - Bit 41 ... 2P1025 (1)0 31,2BI: FF sel. Bit 5P1028.C(722:5)FF mode - Bit 51 ... 2P1027 (1)0 31,212Internal Setpoint SourceFixed Frequency (FF) bit codedMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005117
1: If all FF mode selections equal 3(P1016 = P1017 = P1018 = P1019 = 3)0: For all other cases100ON/OFF1OFF1CO: Act. FFr10247Function diagramMICROMASTER <strong>440</strong>8- 3210 -6453210_FF.vsd03.09.2003 V2.00 0 0 00 0 0 10 1 0 00 1 0 10 1 1 01......1 1 1 1Fixed frequency 1-650.00 ... 650.00 [Hz]P1001.D (0.00). ... ..Fixed frequency 4-650.00 ... 650.00 [Hz]P1004.D (15.00)Fixed frequency 5-650.00 ... 650.00 [Hz]P1005.D (20.00)Fixed frequency 6-650.00 ... 650.00 [Hz]P1006.D (25.00)Fixed frequency 15-650.00 ... 650.00 [Hz]P1015.D (65.00)3(P1016 - P1019 = 3)BI: FF sel. Bit 0P1020.C(0:0)FF mode - Bit 01 ... 3P1016 (1)30 1,2BI: FF sel. Bit 1P1021.C(0:0)FF mode - Bit 11 ... 3P1017 (1)30 1,2BI: FF sel. Bit 2P1022.C(0:0)FF mode - Bit 21 ... 3P1018 (1)30 1,2BI: FF sel. Bit 3P1023.C(722:3)FF mode - Bit 31 ... 3P1019 (1)30 1,212Internal Setpoint SourceFixed Frequency (FF) binary coded118MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
1ON/OFF1CO: Fixed.PID setpr22248- 3300 -Fix.PID setp.Bit 11 ... 3P2217 (1)21Fix.PID setp.Bit 31 ... 3P2219 (1)21Fix.PID setp.Bit 51 ... 2P2227 (1)217Function diagramMICROMASTER <strong>440</strong>Fix.PID setp.Bit 01 ... 3P2216 (1)201Fix.PID setp.Bit 21 ... 3P2218 (1)0201Fix.PID setp.Bit 41 ... 2P2225 (1)02010+ + + + +563300_FPID.vsd03.09.2003 V2.0Fixed PID setp. 1-200.00 ... 200.00 [%]P2201.D (0.00)0 01Fixed PID setp. 2-200.00 ... 200.00 [%]P2202.D (10.00)0 01Fixed PID setp. 3-200.00 ... 200.00 [%]P2203.D (20.00)0 01Fixed PID setp. 4-200.00 ... 200.00 [%]P2204.D (30.00)0 01Fixed PID setp. 5-200.00 ... 200.00 [%]P2205.D (40.00)0 01Fixed PID setp. 6-200.00 ... 200.00 [%]P2206.D (50.00)0 0134(P2216 - P2219, P2225, P2227 = 1 or 2)BI:PID setp->Bit 0P2220.C(0:0)Fix.PID setp.Bit 01 ... 3P2216 (1)0 31,2BI:PID setp->Bit 1P2221.C(0:0)Fix.PID setp.Bit 11 ... 3P2217 (1)0 31,2BI:PID setp->Bit 2P2222.C(0:0)Fix.PID setp.Bit 21 ... 3P2218 (1)0 31,2BI:PID setp->Bit 3P2223.C(722:3)Fix.PID setp.Bit 31 ... 3P2219 (1)0 31,2BI:PID setp->Bit 4P2226.C(722:4)Fix.PID setp.Bit 41 ... 2P2225 (1)0 31,2BI:PID setp->Bit 5P2228.C(722:5)Fix.PID setp.Bit 51 ... 2P2227 (1)0 31,212Internal Setpoint SourceFixed PID setpoint, bit codedMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005119
1: If all FF mode selections equal 3(P2216 = P2217 = P2218 = P2219 = 3)0: For all other cases100ON/OFF1OFF1CO: Fixed.PID setpr22247Function diagramMICROMASTER <strong>440</strong>8- 3310 -6453310_FPID.vsd03.09.2003 V2.00 0 0 00 0 0 10 1 0 00 1 0 10 1 1 01......1 1 1 1Fixed PID setp. 1-200.00 ... 200.00 [%]P2201.D (0.00). ... ..Fixed PID setp. 4-200.00 ... 200.00 [%]P2204.D (30.00)Fixed PID setp. 5-200.00 ... 200.00 [%]P2205.D (40.00)Fixed PID setp. 6-200.00 ... 200.00 [%]P2206.D (50.00)Fixed PID setp. 15-200.00 ... 200.00 [%]P2215.D (130.00)3(P2216 - P2219 = 3)BI:PID setp->Bit 0P2220.C(0:0)Fix.PID setp.Bit 01 ... 3P2216 (1)30 1,2BI:PID setp->Bit 1P2221.C(0:0)Fix.PID setp.Bit 11 ... 3P2217 (1)30 1,2BI:PID setp->Bit 2P2222.C(0:0)Fix.PID setp.Bit 21 ... 3P2218 (1)30 1,2BI:PID setp->Bit 3P2223.C(722:3)Fix.PID setp.Bit 31 ... 3P2219 (1)30 1,212Internal Setpoint SourceFixed PID setpoint, binary coded120MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
8- 3400 -BI: PID-MOP (UP)P2235.C(19:13)BI: PID-MOP (DWN)P2236.C(19:14)Rated frequency12.00 ... 650.00 [Hz]P0310.D (50.00)100 %0 0Setp. of PID-MOP-200.00 ... 200.00 [%]P2240.D (10.00)PID-MOP setp. mem.0 ... 1P2231.D (0)PID-MOP output start valuecontrolInh. neg. PID-MOP0 ... 1P2232 (1)Max. frequency0.00 ... 650.00 [Hz]%P1082.D (50.00) PID-MOPRFG-10 11 010CO: MOP outp. setpr22501 1123456Internal Setpoint SourcePID Motor Potentiometer (PID-MOP)3400_PIDMOP.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005121
CO/BO: Act StatWd2r0053r0053 .1CO/BO: Monitor Wd1r2197r2197.5CO/BO: Act StatWd2r0053r0053 .2CO/BO: Monitor Wd1r2197r2197.0CO/BO: Act StatWd2r0053r0053.3CO/BO: Monitor Wd1r2197r2197.8CO/BO: Monitor Wd2r2198r2198.88- 4100 -7Function diagramMICROMASTER <strong>440</strong>Min. frequency0.00 ... 650.00 [Hz]P1080.D (0.00)10{Hyst. freq. f_hys0.00 ... 10.00 [Hz]P2150.D (3.00)64100_SW21.vsd03.09.2003 V2.0Brake closed(on ramp down)Delay time T_off0 ... 10000 [ms]P2168.D (10)&1T 0Tconst. freq. filt0 ... 1000 [ms]P2153.D (5)0 TDelay time current0 ... 10000 [ms]P2171.D (10)45SwOff freq. f_off0.00 ... 10.00 [Hz]P2167.D (1.00)10no Brake selected10Threshold current0.0 ... 400.0 [%]P2170.D (100.0)Threshold current0.0 ... 400.0 [%]P2170.D (100.0)10 T0Delay time current0 ... 10000 [ms]P2171.D (10)3|f_act| >= P2167 (f_off)f_act|f_act| > P1080 (f_min) f_act|I_act| >= P2170 (I_thresh)I_act|I_act| < P2170I_act12Technology FunctionsMonitoring122MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
CO/BO: Act StatWd2r0053r0053.4CO/BO: Monitor Wd1r2197r2197.2CO/BO: Act StatWd2r0053r0053.5CO/BO: Monitor Wd1r2197r2197.1CO/BO: Act StatWd2r0053r0053.6CO/BO: Monitor Wd1r2197r2197.4CO/BO: Act StatWd1r0052r0052.14CO/BO: Monitor Wd1r2197r2197.3CO/BO: Act StatWd2r0053r0053.7CO/BO: Monitor Wd1r2197r2197CO/BO: Act StatWd2r0053r0053.9.8CO/BO: Monitor Wd1r2197r2197.107Function diagramMICROMASTER <strong>440</strong>8- 4110 -Threshold freq f_10.00 ... 650.00 [Hz]P2155.D (30.00)1T 00{Hyst. freq. f_hys0.00 ... 10.00 [Hz]P2150.D (3.00)Delay time of f_10 ... 10000 [ms]P2156.D (10)Vdc delay time0 ... 10000 [ms]P2173.D (10)T 0654110_SW22.vsd03.09.2003 V2.0T 0Delay time of f_10 ... 10000 [ms]P2156.D (10)010Hyst. freq. f_hys0.00 ... 10.00 [Hz]P2150.D (3.00)Threshold freq f_10.00 ... 650.00 [Hz]P2155.D (30.00)10{Hyst. freq. f_hys0.00 ... 10.00 [Hz]P2150.D (3.00)010{{Hyst. freq. f_hys0.00 ... 10.00 [Hz]P2150.D (3.00)Vdc delay time0 ... 10000 [ms]P2173.D (10)0 T431-1Tconst. freq. filt0 ... 1000 [ms]P2153.D (5)+_f_set10Vdc threshold0 ... 2000 [V]P2172.D (800)f_actf_actVdc_act2|f_act| > P2155 (f_1)|f_act| = f_setf_act > 0|Vdc_act| < P2172|Vdc_act| > P21721Technology FunctionsMonitoringMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005123
CO/BO: Act CtrlWd1r0054r0054to sequence control 1)to braking controlto setpoint channelto sequence control 1)to braking controlto sequence control 1)to braking controlto setpoint channelto sequence control 1)to setpoint channelAll bits = 1 -->drive runsto setpoint channelto setpoint channelto sequence control 1)to sequence control 1)to setpoint channelto sequence control 1)to setpoint channelNote:This bit must be set in the first PZD word of thetelegram received from serial interfaces,so that the converter will accept the process data as beingvalid (compare USS, PROFIBUS, etc.)to setpoint channelto setpoint channelto setpoint channelto sequence control 1)1) The sequence control is the internalcontrol (software) for realizing theinverter status (r0001)7Function diagramMICROMASTER <strong>440</strong>8- 4150 -Parameter r0054Meaning0 = ON/OFF1, Shutdown via ramp, followed by pulse disable1 = ON, operating condition (edge-controlled)0 = OFF2: Electrical stop, pulse disable, motor coasts down1 = Operating condition0 = OFF3: Fast stop1 = Operating condition1 = Pulse enable0 = Pulse disable1 = RFG enable0 = Set RFG to 01 = RFG start0 = Stop RFG1 = RFG setpoint enable0 = Setpoint disable0 = No1 = Fault acknowledge0 = NO1 = JOG right0 = NO1 = JOG left1 = Control from PLC0 = No control from PLC1 = Reverse (setpoint inversion)0 = Revers disabledreserved0 = NO1 = Motor potentiometer MOP up0 = NO1 = Motor potentiometer MOP down0 = NO1 = CDS Bit 0 (local/remote)564150_STW1.vsd03.09.2003 V2.0Bit No.01234567891011121314154BI: ON/OFF1P0840.C(722:0)BI:ON reverse/OFF11P0842.C(0:0)BI: Pulse enable P0852.C(1:0)BI: RFG enable P1140.C(1:0)BI: RFG start P1141.C(1:0)BI:RFG enable setp P1142.C(1:0)BI: Enable JOG -> P1055.C(0:0)BI: Enable JOG
CO/BO: Act CtrlWd2r0055r0055to fixed frequenciesto fixed frequenciesto fixed frequenciesto fixed frequenciesto sequence control 1)to sequence control 1)to PID controlto DC braking controlto speed controlto speed/torque controlto sequence control 1)to sequence control 1)1) The sequence control is the internalcontrol (software) for realizing the drivestatus (r0002)7Function diagramMICROMASTER <strong>440</strong>8- 4160 -6544160_STW2.vsd03.09.2003 V2.0Parameter r0055Bit No. Meaning00 = NO1 = Fixed frequency Bit 010 = NO1 = Fixed frequency Bit 120 = NO1 = Fixed frequency Bit 230 = NO1 = Fixed frequency Bit 340 = NO1 = Drive data set (DDS) Bit 050 = NO1 = Drive data set (DDS) Bit 16reserved7reserved80 = NO1 = PID enabled90 = NO1 = DC brake enabled10reserved110 = NO1 = Droop (only SLVC/VC)120 = NO1 = Torque control (only SLVC/VC)130 = External fault 11 = No external fault14reserved150 = NO1 = Command data set (CDS) Bit 1BI: FF sel. Bit 0 P1020.C(0:0)BI: FF sel. Bit 1 P1021.C(0:0)BI: FF sel. Bit 2 P1022.C(0:0)BI: FF sel. Bit 3 P1023.C(722:3)BI: DDS bit 0 P0820(0:0)BI: DDS bit 1 P0821(0:0)BI: Enab. PID ctrl P2200.C(0:0)BI: Enable DC brk. P1230.C(0:0)BI:-> torque ctrl. P1501.C(0:0)BI: External fault P2106.C(1:0)BI: CDS bit 1 P0811(0:0)3&9 81 02BI: ON/OFF1P0840.C(722:0)BI:ON reverse/OFF1P0842.C(0:0)1Droop input source0 ... 3P1488.D (0)Enable droop0 ... 1P1492.D (0)Seven-segment displaySegment Bit 15 14 13 12 11 10Segment Bit 7 6 5 4 3 21Technology FunctionsControl word 2 (r0055)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005125
CO/BO: Act StatWd1r0052r0052r0052r0052.03P0731..P07331 (x.x)Signal "Fault active" is inverted byMICROMASTER if connected to a digitaloutput which means that the relay will bein the de-energised state.1) The sequence control is the internalcontrol (software) for realizing the drivestatus (r0002)7Function diagramMICROMASTER <strong>440</strong>8- 4170 -Parameter r0052Bit No. Meaning01 = Drive ready0 = Drive not ready11 = Drive ready to run (DC link loaded, pulses disabled)0 = Drive not ready to run21 = Drive running (voltage at output terminals)0 = Pulses disabled31 = Drive fault active (pulses disabled)0 = No fault40 = OFF2 active1 = No OFF250 = OFF3 active1 = No OFF361 = ON inhibit active0 = No On inhibit (possible to switch on)71 = Drive warning active0 = No warning80 = Deviation setpoint / act. value1 = No deviation setpoint / act. Value91 = PZD control (always 1)101 = Maximum frequency reached0 = Maximum frequency not reached110 = Warning: Motor current limit1 = Motor current limit not reached121 = Motor holding brake active0 = Motor holding brake not active130 = Motor overload1 = No Motor overload141 = Motor runs right0 = Motor does not run right150 = Inverter overload1 = No inverter overload4564170_ZSW1.vsd03.09.2003 V2.0from sequence control 1)from sequence control 1)from sequence control 1)from sequence control 1)from sequence control 1)from sequence control 1)from sequence control 1)from alarm processingfrom messagesfrom sequence control 1)from messagesfrom messagesfrom braking controlfrom messagesfrom messagesfrom messages3Seven-segment displaySegment Bit 15 14 13 12 11 109 8Segment Bit 7 6 5 4 3 2 1 012Technology FunctionsStatus word 1 (r0052)126MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
CO/BO: Act StatWd2r0053r00531) The sequence control is the internalcontrol (software) for realizing the drivestatus (r0002)7Function diagramMICROMASTER <strong>440</strong>8- 4180 -64180_ZSW2.vsd03.09.2003 V2.0Parameter r0053Bit No. Meaning01 = DC brake active0 = DC brake not active11 = f_act > P2167 (f_off)21 = f_act >= P1080 (f_min)31 = Act. current r0027 >= P217041 = f_act > P2155 (f_1)51 = f_act = setpoint71 = Act. Vdc r0026 < P217281 = Act. Vdc r0026 > P217291 = Ramping finished101 = PID output r2294 == P2292 (PID_min)111 = PID output r2294 == P2291 (PID_max)12reserved13reserved14Download data set 0 from AOP15Download data set 1 from AOP45from braking controlfrom alarm processingfrom messagesfrom alarm processingfrom messagesfrom messagesfrom messagesfrom messagesfrom alarm processingfrom sequence control 1)from messagesfrom messagesfrom sequence control 1)from sequence control 1)3Seven-segment displaySegment Bit 15 14 13 12 11 109 8Segment Bit 7 6 5 4 3 2 1 012Technology FunctionsStatus word 2 (r0053)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005127
8- 4600 -1CO/BO:Stat MotCtrlr0056r0056 .14f(V DC )FP 6100isq(V DC )FP 79001CO/BO:Stat MotCtrlr0056r0056 .147Function diagramMICROMASTER <strong>440</strong>Vdc ctrl outp. lim0.00 ... 600.00 [Hz]P1253.D (10.00)64600.vsd03.09.2003 V2.0Control mode0 ... 23P1300.D (0)
8- 4800 -3 OR Elements with 2 InputsP2800 P2801[3]P2816Index0Index11r2817P2800 P2801[4]P2818Index0Index11r2819P2800 P2801[5]P2820Index0Index11r28213 NOT Elements with 1 InputP2800 P2801[9]P28281Index0 r2829P28301 CAP2800 P2801[10]Index0 r2831P2800 P2801[11]P28321Index0 r283364800_FreeBlocks1.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>543 AND Elements with 2 InputsP2800 P2801[0]P2810Index0Index1&r2811P2800 P2801[1]P2812Index0Index1&r2813P2800 P2801[2]P2814Index0Index1&r28153 XOR Elements with 2 InputsP2800P2801[6]P2822Index0Index1=1r2823P2800P2801[7]P2824Index0Index1=1r2825P2800 P2801[8]P2826Index0Index1=1r2827123Free BlocksAND-, OR-, XOR- and NOT- ElementsMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005129
8- 4810 -2 D FlipFlops 3 RS FlipFlopsP2800 P2801[12]P2800 P2801[14]SET (Q=1)DQr2835P2840Index0Index1SET(Q=1)Qr2841STOREQr2836POWER ON 1RESET(Q=0)Qr2842RESET (Q=0)1P2843Index0Index1P2800 P2801[15]SET(Q=1)Qr2844P2800 P2801[13]POWER ON 1RESET(Q=0)Qr2845SET (Q=1)DQ r2838P2800 P2801[16]1STOREQRESET (Q=0)r2839P2846Index0Index1POWER ON 1SET(Q=1)RESET(Q=0)QQr2847r2848234564810_FreeBlocks2.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>P2834Index0Index1Index2Index3POWERONP2837Index0Index1Index2Index3POWERON1Free BlocksFlipFlops130MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P2800 P2802[2]P2860 (0.000)0.000...6000.0 sP2861(0)ModeON DelayT 00OFF Delay0 T1ON/OFF DelayT TPulse GerneratorT23r28621 r2863P2800 P2802[3]P2865 (0.000)0.000...6000.0 sP2866(0)ModeON DelayT 00OFF Delay0 T1ON/OFF DelayT TPulse GerneratorT23r28671 r286864820_FreeBlocks3.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 4820 -P2859Index0P2864Index054 Timers 0 ... 6000.0 s4r28521 r2853r28571 r2858P2851(0)ModeP2856(0)Mode3P2800 P2802[0]P2850 (0.000)0.000...6000.0 sON DelayT 00OFF Delay0 T1ON/OFF DelayT T2Pulse GerneratorT3P2800 P2802[1]P2855 (0.000)0.000...6000.0 sON DelayT 00OFF Delay0 T1ON/OFF DelayT T2Pulse GerneratorT32P2849Index0P2854Index01Free BlocksTimersMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005131
8- 4830 -r2878r28802 Multipliers (1 Word)P2800 P2802[8]x1200 %x2-200 %x1 x2100%P2800 P2802[9]x1200 %x2-200 %x1 x2100%Connector Setting in %P2889P28907Function diagramMICROMASTER <strong>440</strong>P2877Index0Index1P2879Index0Index164830_FreeBlocks4.vsd03.09.2003 V2.0r2874r28762 Adders with 2 Inputs (1 Word) 2 Subtracters with 2 Inputs (1 Word)P2800 P2802[4]P2800 P2802[6]P2869P2873Index0Index1x1x2200 %-200 %r2870Index0Index1x1 + x2x1 - x2x1x2200 %-200 %P2800 P2802[5]P2800 P2802[7]P2871P2875Index0Index1x1x2200 %-200 %r2872Index0Index1x1 + x2x1 - x2x1x2200 %-200 %2 Dividers (1 Word)Word CompareP2800 P2802[10]P2800 P2802[12]P2881P2885Index0Index1x1x2x1 100%x2200 %-200 %r2882Index0Index1x1x2CMPOut = x1 ≥ x2P2800 P2802[13]r2886P2800 P2802[11]P2883Index0Index1x1x2200 %-200 %r2884P2887Index0Index1x1x2CMPOut = x1 ≥ x2r2888x1 100%x212345Free BlocksAdders, Subtracters, Multipliers, Dividers, Comparators, Setting in %132MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
MOD8- 5000 -6100V/f controlFluxsetpoint780079007500 - 7700Speed /torquecontrolCurrentcontrol7900Motor modelMotor identification7Function diagramMICROMASTER <strong>440</strong>Control mode0 ... 23P1300.D (0)P1055.C(0:0)BI: Enable JOG 0.00 ... 650.00 [Hz]P1058.D (5.00)JOG frequency
CO/BO: Act StatWd2r0053r0053r0053.11.10r2294CO: Act.PID output8- 5100 -PID setp.filt.Tcon0.00 ... 60.00 [s]P2261 (0.00)PID ctrl. type0 ... 1P2263 (0)PID prop. gain0.000 ... 65.000P2280 (3.000)PID integral time0.000 ... 60.000 [s]P2285 (0.000)CO: PID setp
8- 5200 -Skip frequency 20.00 ... 650.00 [Hz]P1092.D (0.00)Skip frequency 40.00 ... 650.00 [Hz]P1094.D (0.00)Skip frequency 10.00 ... 650.00 [Hz]P1091.D (0.00)Skip frequency 30.00 ... 650.00 [Hz]P1093.D (0.00)Max. frequency0.00 ... 650.00 [Hz]P1082.D (50.00)f OUTResultant max freq [Hz]r1084yxRFGBandwidthSkip frequencyr1119f INCO:Setp before RFGr1114CO:Setp
CO:Setp. after RFG [Hz]r1170+7Function diagramMICROMASTER <strong>440</strong>8- 5300 -Ramp-up ini. Trnd0.00 ... 40.00 [s]P1130.D (0.00)Ramp-up final Trnd0.00 ... 40.00 [s]P1131.D (0.00)Ramp-dwn ini. Trnd0.00 ... 40.00 [s]P1132.D (0.00)Ramp-dwn fin. Trnd0.00 ... 40.00 [s]P1133.D (0.00)Rounding type0 ... 1P1134.D (0)ffrom AFMCO:Setp before RFG [Hz]r11191001fx fy0010BI: RFG startP1141.C(1:0)BI:RFG enable setpP1142.C(1:0)(Freeze y)Stop RFGBring RFG to a standstillP1130Ramp-up time0.00 ... 650.00 [s]P1120.D (10.00)P1131P1132P1133Ramp-down time0.00 ... 650.00 [s]P1121.D (10.00)tBI: RFG enableP1140.C(1:0)1 = Enable RFG0 = Set RFG to zeroPOWER ON1fy = 0PID trim123456Setpoint ChannelRamp Function Generator5300_RFG.vsd03.09.2003 V2.0136MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
P1338Resonancedamping−CO: Act outp. freqr0024n/f(max) +control reserveFrequency output tomodulatorCO: Act.outp. voltr0025Voltage output tomodulator7Function diagramMICROMASTER <strong>440</strong>8- 6100 -P1240VdmaxcontrollerP1335Slipcompensation++ +r1170CO:Setp. after RFGr0063CO: Act. frequencyCO:Imax ctrl Foutpr1343CO:Imax ctrl Voutpr1344+−66100_V_f.vsd03.09.2003 V2.0P1200Flying startactiveactivef(VDC )FP 4600+CO/BO:Stat MotCtrlr0056r0056 .13Imax frequency ctrl.P1340P1341Imax voltage ctrl.P1345P1346P1350Voltagebuild-up5+Control mode0 ... 23P1300.D (0)194from AFMRFG+PID trimr1119CO:Setp before RFGMotor ovl fact [%]10.0 ... 400.0 [%]P0640.D (150.0)CI: Voltage setp.P1330.C(0:0)Rated mot. current0.01 ... 10000.00 [A]P0305.D (3.25)Motor temperaturInverter temperaturi 2 t inverterImax controller setpointr0067CO: Outp cur limit [A]Current feedback−r0068CO: Output current [A]P1300V/f characteristic+FCC+Voltage boostP1310 ... P1312123V/f ControlOverview of V/f ControlMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005137
Speed controlSheet 7500Torque/current limitFlux setpointSheet 7700Current control,Observer modelSheet 7900Modulatorfrom setpointchannelMax. frequency0.00 ... 650.00 [Hz]P1082.D (50.00)−Max. frequency0.00 ... 650.00 [Hz]P1082.D (50.00)1CO:Setp. after RFG [Hz]r1170Gain n-ctrl (SLVC)0.0 ... 2000.0P1470.D (3.0)–Tn of n-ctrl. SLVC25 ... 32001 [ms]P1472.D (400)CO: Lower trq. lim-99999.00 ... 99999.00 [Nm]P1521.D (-5.13)Sheet 7800Motoring power lim0.00 ... 8000.00CO: Upper trq. lim P1530.D (0.12)-99999.00 ... 99999.00 [Nm]P1520.D (5.13)CI: Upper trq. limP1522.C(1520:0)CI: Lower trq. limP1523.C(1521:0)Motor ovl fact [%]10.0 ... 400.0 [%]P0640.D (150.0)CO: Fval flux setp50.0 ... 200.0 [%]P1570.D (100.0)TorquelimitationRegener. power lim-8000.00 ... 0.00P1531.D (-0.12)CO: Max. outp.volt [V]r0071xyGain current ctrl.0.00 ... 5.00P1715.D (0.25)–Int.time cur. ctrl1.0 ... 50.0 [ms]P1717.D (4.1)r0030CO: Torque gen.cur [A]Kp Tn*)*)4CO: Act. outp.volt [V]r0072Voltage6CO: Act. Vdc [V]r00705CO: Output current [A]r0068Asyc.Mot. 3~NoteThe current injection of P1610is only calculated when theobserver model is off.r0050 = act. command data set(CDS)r0051.1 = act. drive data set (DDS)*) only access level 4**) settable via P1000Filter time (SLVC)0 ... 32000 [ms]P1452.D (4)2Scal acc. prectrl.0.0 ... 400.0 [%]P1496.D (0.0)Tot/mot inert.rat.1.000 ... 400.000P0342.D (1.000)Inertia [kg*m^2]0.00010 ... 1000.00000P0341.D (0.00180)r0063 CO: Act. frequency [Hz]Efficiency optimiz0 ... 100 [%]P1580.D (0)Cont. torque boost0.0 ... 200.0 [%]P1610.D (50.0)Acc trq boost SLVC0.0 ... 200.0 [%]P1611.D (0.0)Currentmodel30 ms–r0029CO: Flux gen. cur. [A]+ +r0065CO: Slip frequency [%]ObservermodelKp n-adapt. (SLVC)0.0 ... 2.5P1764.D (0.2)*)Tn n-adapt. (SLVC)1.0 ... 200.0 [ms]P1767.D (4.0)Pulse frequency2 ... 16 [kHz]P1800 (4)r00663CO: Act. outp freq [Hz]*)123456Vector ControlOverview of Speed Control without Encoder (SLVC): P1300 = 20 and P1501 = 07000.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 7000 -138MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Speed controlSheet 7500Torque/current limitFlux setpointSheet 7700Current control,Observer modelSheet 7900Modulatorfrom setpointchannelFrom EncoderMax. frequency0.00 ... 650.00 [Hz]P1082.D (50.00)−Max. frequency0.00 ... 650.00 [Hz]P1082.D (50.00)NoteThe current injection of P1610 isonly calculated when theobserver model is off.r0050 = act. command data set(CDS)r0051.1 = act. drive data set(DDS)*) only access level 4**) settable via P10001CO:Setp. after RFG [Hz]r1170Filter time n_act.0 ... 32000 [ms]P1442.D (4)2Gain of n-ctrl.0.0 ... 2000.0P1460.D (3.0)–Scal acc. prectrl.0.0 ... 400.0 [%]P1496.D (0.0)Tot/mot inert.rat.1.000 ... 400.000P0342.D (1.000)Inertia [kg*m^2]0.00010 ... 1000.00000P0341.D (0.00180)Tn of n-ctrl.25 ... 32001 [ms]P1462.D (400)r0063 CO: Act. frequency [Hz]CO: Lower trq. lim-99999.00 ... 99999.00 [Nm]P1521.D (-5.13)Sheet 7800Motoring power lim0.00 ... 8000.00CO: Upper trq. lim P1530.D (0.12)-99999.00 ... 99999.00 [Nm]P1520.D (5.13)CI: Upper trq. limP1522.C(1520:0)CI: Lower trq. limP1523.C(1521:0)Motor ovl fact [%]10.0 ... 400.0 [%]P0640.D (150.0)CO: Fval flux setp50.0 ... 200.0 [%]P1570.D (100.0)Efficiency optimiz0 ... 100 [%]P1580.D (0)CurrentmodelTorquelimitationRegener. power lim-8000.00 ... 0.00P1531.D (-0.12)CO: Max. outp.volt [V]r0071xyInt.time cur. ctrl1.0 ... 50.0 [ms]P1717.D (4.1)Gain current ctrl.0.00 ... 5.00P1715.D (0.25)–r0030CO: Torque gen.cur [A]–Kp Tnr0029CO: Flux gen. cur. [A]+ +r0065CO: Slip frequency [%]ObservermodelKp n-adapt. (SLVC)0.0 ... 2.5P1764.D (0.2)*)*)*)4CO: Act. outp.volt [V]r0072VoltageTn n-adapt. (SLVC)1.0 ... 200.0 [ms]P1767.D (4.0)r00666CO: Act. Vdc [V]r0070CO: Output current [A]r0068Pulse frequency2 ... 16 [kHz]P1800 (4)5Asyc.Mot. 3~3CO: Act. outp freq [Hz]*)123456Vector ControlOverview of Speed Control with Encoder (VC): P1300 = 21 and P1501 = 07010.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 7010 -MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005139
Torque/current limitFlux setpointSheet 7700CO: Lower trq. lim-99999.00 ... 99999.00 [Nm]P1521.D (-5.13)CO: Upper trq. lim-99999.00 ... 99999.00 [Nm]P1520.D (5.13)CI: Upper trq. lim(1520:0)P1522.CMotoring power lim0.00 ... 8000.00P1530.D (0.12)Regener. power lim-8000.00 ... 0.00P1531.D (-0.12)Current control,Observer modelSheet 7900ModulatorCI: Lower trq. limP1523.C(1521:0)Torque limitationr1539CO:Total lw TrqLim [Nm]CI: Add. trq. setpP1511.C(0:0)CI: Torque setp.P1503.C(0:0)*)*)CO: Add. trq. setp [Nm]r1515CO: Torque setp. [Nm]r1508Motor ovl fact [%]10.0 ... 400.0 [%]P0640.D (150.0)r0067CO: Outp cur limit [A]CO:Total up TrqLim [Nm]r1538CO: Total trq setp [Nm]r0079xyGain current ctrl.0.00 ... 5.00P1715.D (0.25)–Int.time cur. ctrl1.0 ... 50.0 [ms]P1717.D (4.1)*)*) r00704CO: Act. outp.volt [V]r00726CO: Act. Vdc [V]r00685CO: Output current [A]*) settable via P1500Tot/mot inert.rat.1.000 ... 400.000P0342.D (1.000)**) The speed integrator doesn't work inthe range of the observer modelInertia [kg*m^2]0.00010 ... 1000.00000P0341.D (0.00180)Scal acc. trq ctrl0.0 ... 400.0 [%]P1499.D (100.0)Max. frequency0.00 ... 650.00 [Hz]P1082.D (50.00)–Max. frequency0.00 ... 650.00 [Hz]P1082.D (50.00)CO: Act. frequency [Hz]r00632Sheet 7800CO: Fval flux setp50.0 ... 200.0 [%]P1570.D (100.0)Efficiency optimiz0 ... 100 [%]P1580.D (0)Cont. torque boost0.0 ... 200.0 [%]P1610.D (50.0)Acc trq boost SLVC0.0 ... 200.0 [%]P1611.D (0.0)CurrentmodelCO: Max. outp.volt [V]r007130 msr0030CO: Torque gen.cur [A]–Kp Tnr0029CO: Flux gen. cur. [A]Voltage+ +r0065CO: Slip frequency [%]ObservermodelKp n-adapt. (SLVC)0.0 ... 2.5P1764.D (0.2)*)Tn n-adapt. (SLVC)1.0 ... 200.0 [ms]P1767.D (4.0)Pulse frequency2 ... 16 [kHz]P1800 (4)r0066Asyc.Mot. 3~CO: Act. outp freq [Hz]*)3123456Vector ControlOverview of Torque Control without Encoder: P1300 = 22 or P1300 = 20 and P1501 = 17200.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 7200 -140MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Torque/current limitFlux setpointSheet 7700CO: Lower trq. lim-99999.00 ... 99999.00 [Nm]P1521.D (-5.13)CO: Upper trq. lim-99999.00 ... 99999.00 [Nm]P1520.D (5.13)CI: Upper trq. lim(1520:0)P1522.CMotoring power lim0.00 ... 8000.00P1530.D (0.12)Regener. power lim-8000.00 ... 0.00P1531.D (-0.12)Current control,Observer modelSheet 7900ModulatorCI: Lower trq. limP1523.C(1521:0)Torque limitationr1539CO:Total lw TrqLim [Nm]CI: Add. trq. setpP1511.C(0:0)CI: Torque setp.P1503.C(0:0)*)*)CO: Add. trq. setp [Nm]r1515CO: Torque setp. [Nm]r1508Motor ovl fact [%]10.0 ... 400.0 [%]P0640.D (150.0)r0067CO: Outp cur limit [A]CO:Total up TrqLim [Nm]r1538CO: Total trq setp [Nm]r0079xyGain current ctrl.0.00 ... 5.00P1715.D (0.25)–Int.time cur. ctrl1.0 ... 50.0 [ms]P1717.D (4.1)*)*)4CO: Act. outp.volt [V]r00726CO: Act. Vdc [V]r00705CO: Output current [A]r0068Sheet 7800CO: Fval flux setp50.0 ... 200.0 [%]P1570.D (100.0)CO: Max. outp.volt [V]r0071r0030CO: Torque gen.cur [A]Kp TnVoltageAsyc.Mot. 3~From Encoder*) settable via P1500**) The speed integrator doesn't work inthe range of the observer modelCO: Act. frequency [Hz]r00632Efficiency optimiz0 ... 100 [%]P1580.D (0)Currentmodel–r0029CO: Flux gen. cur. [A]+ +r0065CO: Slip frequency [%]ObservermodelKp n-adapt. (SLVC)0.0 ... 2.5P1764.D (0.2)*)Tn n-adapt. (SLVC)1.0 ... 200.0 [ms]P1767.D (4.0)Pulse frequency2 ... 16 [kHz]P1800 (4)r00663CO: Act. outp freq [Hz]*)123456Vector ControlOverview of Torque Control with Encoder: P1300 = 23 or P1300 = 21 and P1501 = 17210.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 7210 -MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005141
Droop scaling0.00 ... 0.50P1489.D (0.05)Droop input source0 ... 3P1488.D (0)00123Forward speedto observer modelFP7900CO: Accel. torque [Nm]r1518CO: Freq. setp ctl [Hz]r1438r0064Gain n-ctrl (SLVC)0.0 ... 2000.0P1470.D (3.0)CO: Dev. freq ctrl [Hz]**) Tn of n-ctrl. SLVC **)25 ... 32001 [ms]P1472.D (400)Kp Tnr1538Speed precontrolto torque limitationFP7700CO:Int.outp n-ctrl [Nm]r1482*)−BI: Set integratorP1477.C(0:0)CI: Set int. valueP1478.C(0:0)Config. of n-ctrl.0 ... 3P1400.D (1)r1539Speed controller outputto torque limitationFP7700*) only access level 4**) changeable in run via DDS67500_SLVC.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 7500 -CO: Droop freq. [Hz]r1490150 msInertia [kg*m^2]0.00010 ... 1000.00000P0341.D (0.00180)Tot/mot inert.rat.1.000 ... 400.000P0342.D (1.000)Scal acc. prectrl.0.0 ... 400.0 [%]P1496.D (0.0)0>0Filter time (SLVC)0 ... 32000 [ms]P1452.D (4)CO: Act. filt freq [Hz]r144545P1300 = 20 and P1501 = 0from torque limitationr1508from torque limitationr0079FP7700bFP7700aEnable droop0 ... 1P1492.D (0)100from ramp generator−Resultant max freq [Hz]r1084−r0062CO: Freq. setpoint [Hz]CO: Act. frequency [Hz]r0063speed from observer model123Vector ControlSpeed Controller without Encoder (SLVC):142MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Droop scaling0.00 ... 0.50P1489.D (0.05)Droop input source0 ... 3P1488.D (0)00123CO: Accel. torque [Nm]r1518CO: Freq. setp ctl [Hz]r1438CO: Dev. freq ctrl [Hz]r0064Gain of n-ctrl.0.0 ... 2000.0P1460.D (3.0)**) Tn of n-ctrl. **)25 ... 32001 [ms]P1462.D (400)Kp Tnr1538Speed precontrolto torque limitationFP7710CO:Int.outp n-ctrl [Nm]r1482*)−BI: Set integratorP1477.C(0:0)CI: Set int. valueP1478.C(0:0)Config. of n-ctrl.0 ... 3P1400.D (1)r1539Speed controller outputto torque limitationFP7710Forward speedto observer modelFP790067510_VC.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 7510 -CO: Droop freq. [Hz]r1490100Inertia [kg*m^2]0.00010 ... 1000.00000P0341.D (0.00180)Tot/mot inert.rat.1.000 ... 400.000P0342.D (1.000)Scal acc. prectrl.0.0 ... 400.0 [%]P1496.D (0.0)0>0r0062CO: Freq. setpoint [Hz]CO: Act. frequency [Hz]r0063Filter time n_act.0 ... 32000 [ms]P1442.D (4)CO: Act. filt freq [Hz]r1445345P1300 = 21 and P1501 = 0from torque limitationr1508from torque limitationr0079FP7710bFP7710aEnable droop0 ... 1P1492.D (0)from ramp generator−Resultant max freq [Hz]r1084−CO: Act. enc. freq [Hz]r0061from speed measurement*) only access level 4**) changeable in run via DDS12Vector ControlSpeed Controller with Encoder (VC):MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005143
Scal acc. trq ctrl0.0 ... 400.0 [%]P1499.D (100.0)Resultant max freq [Hz]r1084enableForward speed−to observer modelFP7900Inertia [kg*m^2]0.00010 ... 1000.00000P0341.D (0.00180)Tot/mot inert.rat.1.000 ... 400.000P0342.D (1.000)CO/BO: Stat 2 ctrlr1407r1407.8FP7900to current controland FP7500ar0079CO: Total trq setp [Nm]r1407r1407.9CO/BO: Stat 2 ctrlMIN+r1538CO:Total up TrqLimSpeed limitationcontroller(only for torquecontrol)-1MAX−r1539CO:Total lw TrqLimCO:Max trq mot cur*)MINr1536MAXr1537CO:Max trq reg cur *)67700_TC.vsd03.09.2003 V2.07Function diagramMICROMASTER <strong>440</strong>8- 7700 -CO/BO: Stat 2 ctrlFP7500b.8r1407r1407r1508CO: Torque setp..9r1407r1407CO/BO: Stat 2 ctrlImaxMotor stallprotectionIdFrom flux setpointCO: Upper trq. limr1526Power limitationRegener. power lim-8000.00 ... 0.00P1531.D (-0.12)M [Nm] =1000 ⋅ P [kW]2 ⋅ π ⋅ fMotoring power lim0.00 ... 8000.00P1530.D (0.12)act. frequencyr1527CO: Lower trq. lim54CI: Add. trq. setpP1511.C(0:0)**)CO: Add. trq. setpr1515CO: Accel. torqueSpeed precontrolFP75000r1518BI:-> torque ctrl.01P1501.C(0:0)CI: Torque setp. **)P1503.C(0:0)1r1538Speed controller outputFP7500Rated mot. current0.01 ... 10000.00 [A]P0305.D (3.25)0r1539Motor temperaturInverter temperatur CO: Outp cur limiti 2 t inverter r0067Motor ovl fact [%]10.0 ... 400.0 [%]P0640.D (150.0)CO: Upper trq. lim-99999.00 ... 99999.00 [Nm]P1520.D (5.13)CI: Upper trq. lim(1520:0)P1522.CCO: Lower trq. lim-99999.00 ... 99999.00 [Nm]P1521.D (-5.13)CI: Lower trq. limScal. low trq. lim-400.0 ... 400.0 [%]P1525.D (100.0)(1521:0)P1523.C*) only access level 4**) selectable with P1500123Vector ControlTorque Controller and Torque Limitation (SLVC)144MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
CO/BO: Stat 2 ctrlr1407r1407.8FP7900to current controland FP7510ar0079CO: Total trq setp [Nm]r1407r1407.9CO/BO: Stat 2 ctrlr1538CO:Total up TrqLimr1539CO:Total lw TrqLimCO:Max trq mot cur*)r1536r1537CO:Max trq reg cur*)8- 7710 -+Speed limitationcontroller(only for torquecontrol)−7Function diagramMICROMASTER <strong>440</strong>MIN-1MAXMINMAX67710_TC.vsd03.09.2003 V2.0FP7510br1508CO: Torque setp.Motor stallprotectionPower limitationM [Nm] =1000 ⋅P [kW]2 ⋅ π ⋅ f5CO/BO: Stat 2 ctrlr1538r1407r1407.8r1539r1407r1407.9CO/BO: Stat 2 ctrlImaxFrom flux setpointIdCO: Upper trq. limr1526Regener. power lim-8000.00 ... 0.00P1531.D (-0.12)Motoring power lim0.00 ... 8000.00P1530.D (0.12)act. frequencyr1527CO: Lower trq. lim4CI: Add. trq. setpP1511.C(0:0)**)CO: Add. trq. setpr1515Speed precontrolFP75100CO: Accel. torquer1518BI:-> torque ctrl.01P1501.C(0:0)CI: Torque setp.**)P1503.C(0:0)1Speed controller output0FP7510Rated mot. current0.01 ... 10000.00 [A]P0305.D (3.25)Motor temperaturInverter temperaturi 2 t inverterCO: Outp cur limitr0067Motor ovl fact [%]10.0 ... 400.0 [%]P0640.D (150.0)CO: Upper trq. lim-99999.00 ... 99999.00 [Nm]P1520.D (5.13)CI: Upper trq. lim(1520:0)P1522.CCO: Lower trq. lim-99999.00 ... 99999.00 [Nm]P1521.D (-5.13)CI: Lower trq. limScal. low trq. lim-400.0 ... 400.0 [%]P1525.D (100.0)(1521:0)P1523.C*) only access level 4**) selectable with P1500123Vector ControlTorque Controller and Torque Limitation (VC)MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005145
Idto current controland stallprotection8- 7800 -Saturation characteristicP0362 ... P0369 *)7Function diagramMICROMASTER <strong>440</strong>CO/BO:Stat MotCtrlr0056r00560CO:Outp.weak. ctrl [%] *)r1597CO:Total flux setp [%]r1598r1583CO: Smoothed setp. [%]*)67800_VC.vsd03.09.2003 V2.0Int.time weak.ctrl20 ... 32001 [ms]P1596.D (50)Field weakening controllerCO/BO:Stat MotCtrlr0056r0056Motor model StatWdr175101Flux setp. Tsmooth4 ... 500 [ms]P1582.D (15)Fluxsetpointgeneration5Dyn. volt headroom0 ... 150 [V]P1574.D (10)*)Max. modulation20.0 ... 150.0 [%]P1803.D (106.0)CO: Max. outp.volt [V]r0071−−:2CO/BO:Stat MotCtrlr0056r0056CO: Act. fil. Vdc [V]r0026from Vdc measurementVsetp.from current controlCO: Fval flux setp50.0 ... 200.0 [%]P1570.D (100.0)Magnetization time0.000 ... 20.000 [s]P0346.D (1.000)Act. frequency1Field weakeningcharacteristicMINEfficiency optimiz0 ... 100 [%]P1580.D (0)Efficiency optimizationRotor time const. [ms]r0384.DCont. torque boost0.0 ... 200.0 [%]P1610.D (50.0)x2−y 2Acc trq boost SLVC0.0 ... 200.0 [%]P1611.D (0.0)30 msCO: Torque setp. [Nm]r1508from speed controlRated magnet. cur. [A]r0331.D*) only access level 41234Vector ControlFlux Setpoint (SLVC and VC)146MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
to field weakening controlCO: Act modulation [%]r0074 *):2CO: Act. Vdc [V] *)r0070CO: Act pulse freq [kHz]CO/BO:Stat MotCtrlr1801CO/BO:Stat MotCtrlr0056r0056r0056r0056r0071V set P1800P1802ModulatorP1820αP1825 *)P1826 *)ϕSlipdeterminationCO: Act. outp freq [Hz]r0066CO: Slip frequency [%]r0065OscillationdampingOscill. damp. gain0.000 ... 10.000P1740 (0.000)only SLVC:speed to speed controller8- 7900 -7Function diagramMICROMASTER <strong>440</strong>Tot.leak.react.[%] [%]r0377.DCO: Total stat.res [%]r0395*)Rotor fluxVoltage precontrolCO: Decoupl. volt [V] *)r1728From flux setpointCO: Cur. setp. Isd [A]r0075IdCO: Cur. setp. Isq [A]r0077−CO: Act. cur. Isd [A]r0076Kp Tnid controllerr1725 *)CO: Int. outp. Isq [V]*)r1719CO: Int. outp. Isd [V]r1724r1723*)CO: Outp. Isd ctrl [V] *)−CO: Outp. Isq ctrl [V] *)r1718VdVqKPIsq setp. Tsmooth2.0 ... 20.0 [ms]P1654.D (6.0)*)CO: Act. cur. Isq [A]r0078Gain current ctrl.0.00 ... 5.00P1715.D (0.25)Kp TnInt.time cur. ctrl1.0 ... 50.0 [ms]P1717.D (4.1)P1755 *)P1756 *)P1757 *)P1758 *)Model controlFrom speed controlRotor flux:+ −r0395r0396isq(V DC )FP 4600i RCO: Act. phase cur [A]r0069 [6]From current measurementCO: Act. phase cur [A]r0069 [6]i S*)*)Transformationiq controllerCO: Output current [A]r0068P1750P1780P1781 *)P1786 *)Observer modelKp Tnr1751r1782r1787r0084 *)CO: Int. outp n-ad [Hz]r1771CO: Prop outp n-ad [Hz]r1770Forward speedFrom speed or torque control*) only access level 4Kp n-adapt. (SLVC)0.0 ... 2.5P1764.D (0.2)*) Tn n-adapt. (SLVC) *)1.0 ... 200.0 [ms]P1767.D (4.0)123456Vector ControlCurrent Controller & Observer Model (SLVC and VC)7900_MM.vsd03.09.2003 V2.0MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005147
5. Hälytykset ja varoituksetHäiriön tapahtuessa taajuusmuuttaja sammuu ja häiriönumero ilmestyy näytölle.HuomioHäiriön kuittaus on mahdollista seuraavilla tavoilla:1. Katkaise taajuusmuuttajan syöttöjännite ja kytke se uudelleen.2. Paina nappia joko perusnäyttöpaneelilta (BOP or AOP).3. Käytä digitaalituloa 3 (tehdasasetus)Häiriötieto tallentuu parametriin r0947 häiriönumerokoodina (esim. F0003 = 3) allaolevan listan mukaisesti. Häiriön arvo löytyy parametrista r0949. Häiriön arvon (r0949)ollessa 0, ei häiriöllä ole erillistä lisäarvoa. Häiriön tapahtumaaika on myös mahdollistalukea parametrista r0948 ja häiriöiden kokonaismäärä löytyy parametrista P0952.Häiriönumerot: F0xxx = hälytys, A0xxx = varoitusHäiriönumero Mahdollinen syy Diagnoosi ja korjaustoimi ReaktioF0001YlivirtaF0002YlijänniteF0003AlijänniteF0004TaajuusmuuttajanylilämpöF0005TaajuusmuuttajanI2T‣ Moottoriteho (P0307) ei vastaataajuusmuuttajan virtaa (P0206).‣ Moottorijohdossa oikosulku.‣ Maasulku.‣ Vioittunut pääteaste (lähtötransistori)‣ Välipiirijännite (r0026) ylittää häiriörajan(P2172).‣ Liian korkea verkkosyöttöjännite taimoottori on regeneratiivisessa tilassa.‣ Regeneratiivinen tila voi johtua myösnopeasta jarrutuksesta tai jos voimassaoleva kuorma pyörittää moottoria.‣ Verkkojännitehäiriö.‣ Kuormituspiikki määrättyjen rajojenulkopuolella.‣ Tuuletus riittämätön.‣ Laitetuuletinvika.‣ Ympäristölämpötila sallittujen rajojenulkopuolella.‣ Taajuusmuuttaja ylikuormitettu.‣ Käyttöjakso liian vaativa.‣ Moottoriteho (P0307) ylittäätaajuusmuuttajan teho (P0206).Tarkista, että:1. Moottorin teho (P0307) vastaataajuusmuuttajan tehoa (P0206).2. Kaapelipituusrajat eivät ylity.3. Moottorikaapeleissa tai moottorissa ei oleoikosulkua tai maasulkua.4. Moottoriparametrit ovat käytössä olevanmoottorin mukaiset.5. Staattorivastuksen arvo (P0350) on oikea.6. Moottorin pyöriminen ei ole estetty, eikämoottori ylikuormitettu.Pidennä kiihdytysaika.Pienennä asetettua jännitteenlisäystä.Tarkista, että:1. Syöttöjännite (P0210) pysyy syöttöjännitteenarvokilvessä annettujen arvojen sisällä.2. Välipiirijännitesäädin on aktivoitu (P1240) jaoikein parametroitu.3. Jarrutusaika (P1121) vastaa kuormitukseninertiaa.4. Tarvittava jarrutusteho on määrättyjen rajojensisällä.Huom.Korkeampi inertia vaatii pidemmät jarrutusajat;muussa tapauksessa käytä jarrutusvastusta.Tarkista, että:1. Syöttöjännite (P0210) on arvokilvessämäärättyjen rajojen sisällä.2. Verkkosyötössä ei tapahdu hetkellisiä katkoksiatai jännitteenpudotuksia.Tarkista, että:1. Sisäinen laitetuuletin pyörii kun taajuusmuuttajaon käynnissä.2. Kytkentätaajuus on asetettu oletusarvonmukaisesti.Lisäksi FX ja GX malleissa:3. P0949=1: Tasasuuntaajan ylilämpö4. P0949=2: Ympäristön ylilämpö5. P0949=3: EBOX ylilämpöYmpäristölämpötila voi olla korkeampi kuintaajuusmuuttajan teknisissä tiedoissa määriteltyarvo.Tarkista, että:1. Käyttöjakso pysyy määriteltyjen rajojen sisällä.2. Moottorin teho (P0307) vastaataajuusmuuttajan tehoa (P0206).Off2Off2Off2Off2Off2148MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Häiriönumero Mahdollinen syy Diagnoosi ja korjaustoimi ReaktioF0011Moottorin ylilämpö‣ Moottori ylikuormittunut. Tarkista, että:1. Kuormituksen käyttöjakso pysyy määriteltyjenrajojen sisällä.2. Moottorin nimellisylilämpö (P0626-P0628) onoikein.3. Moottorilämpötilan varoitusraja (P0604) onsopiva.Off1F0012TaajuusmuuttajanlämpötilasignaalinpuuttuminenF0015MoottorinlämpötilasignaalinpuuttuminenF0020Syöttövaihe puuttuuF0021MaasulkuhäiriöF0022Teho-osan häiriöF0023UlostulohäiriöF0024TasasuuntausyksikönylilämpöF0030TuuletinepäkunnossaF0035Uudelleenkäynnistysyritykset n-määränjälkeenF0040Häiriöautomaattisessakalibroinnissa‣ Johdinvika taajuusmuuttajanjäähdytyslevyn antureissa.‣ Johdinvika moottorin lämpötilaantureissa.Jos signaalin puuttuminenhavaitaan, lämpötilavalvonta kytkeytyyseuraamaan laskennallistamoottorilämpötilamallia.‣ Häiriö sattuu, jos yksi kolmestasyöttävästä vaiheesta puuttuu ja ohjauson päällä ja taajuusmuuttaja onkuormitettu.‣ Häiriö sattuu, jos vaihevirranyhteissumma on korkeampi kuin 5 %taajuusmuuttajan nimellisvirrasta.Huom.Tämä häiriö esiintyy ainoastaantaajuusmuuttajissa, joissa on 3 virta-anturia,eli laitemallit D – F.‣ Häiriön aiheuttaa seuraavat:(1) välipiiriylivirta = IGBT oikosulku(2) jarrukatkojan oikosulku(3) maasulku(4) I/O-kortti löysällä- Laitekoot A - C (1),(2),(3),(4)- Laitekoot D - E (1),(2),(4)- Laitekoko F (2),(4)‣ Koska kaikki nämä virheet kuuluvatsamaan virheviestiin teho-osan häiriöön,ei ole mahdollista määritellä mikä häiriöon kyseessä.Tarkista, että syöttövaiheet ovat kunnossaJatkuva F0022 häiriö:- tarkista, että I/O-kortti on kunnolla paikallaan- tarkista, ettei ole oikosulkua tai maasulkuaHetkellinen (kuitattava) F0022 häiriö:- hetkellinen ylikuorma- erittäin lyhyet ramppiajat- vektorisäätö värähtelee- jarruvastuksen vastusarvo liian pieni‣ Yksi ulostulovaihe on kytkemättä Off2‣ Ilmanvaihto riittämätöntä‣ Tuulettimen toiminta riittämätöntä‣ Ympäristön lämpötila on liian korkeaTarkista, että:1. Tuuletin pyörii, kun taajuusmuuttaja käy.2. Kytkentätaajuus on asetettutehdasasetusarvoon.3. Ympäristön lämpötila on käyttöohjeensallimissa rajoissa.‣ Tuuletin ei toimi. Virhettä ei voida ohittaa kun Peruskäyttö- taiTekstipaneelit on käytössä. Vaihda tuuletin.‣ Uudelleenkäynnistysyritysten määränousee yli P1211 määräämän arvon‣ Ainoastaan MICROMASTER <strong>440</strong>-taajuusmuuttajamallissa.Vaihda taajuusmuuttaja.Off1Off2Off2Off2Off2Off2Off2Off2Off2MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005149
Häiriönumero Mahdollinen syy Diagnoosi ja korjaustoimi ReaktioF0041Moottoritietojentunnistus eionnistunutF0042NopeussäädönoptimointihäiriöF0051ParametrinEEPROM häiriöF0052TehoyksikkövirheF0053IO EEPROM-häiriöF0054Väärä IO korttiF0060ASIC timeoutF0070CB ohjearvohäiriöF0071USS (BOP-liitin)ohjearvohäiriöF0072USS (tietoliikenneliitin)ohjearvohäiriöF0080AD-muuntimentulosignaalihäiriöF0085Ulkoinen häiriöF0090TakaisinkytkennänsignaalihäiriöF0101Pinon ylivuoto‣ Moottoritietojen tunnistus epäonnistui‣ Häiriöarvo =0: Ei kuormitusta.‣ Häiriöarvo =1: Virtarajoitus saavutettutunnistuksen aikana.‣ Häiriöarvo =2: Tunnistettustaattorivastus alle 0.1% tai yli 100%.‣ Häiriöarvo =3: Tunnistetturoottoriresistanssi alle 0.1% tai yli 100%.‣ Häiriöarvo =4: Tunnistettu staattorireaktanssialle 50% tai yli 500%.‣ Häiriöarvo =5: Tunnistettu pääreaktanssialle 50% ja yli 500%.‣ Häiriöarvo =6: Tunnistetturoottoriaikavakio alle 10 ms tai yli 5 s.‣ Häiriöarvo =7: Tunnistettu yht.hajareaktanssi alle 5% ja yli 50%.‣ Häiriöarvo =8: Tunnistettustaattorihäviön reaktanssi alle 25% ja yli250%.‣ Häiriöarvo =9: Tunnistettu roottorin hajainduktanssialle 25% ja yli 250%.‣ Häiriöarvo = 20: Tunnistettu IGBTkäynnistysjännite alle 0.5 tai yli 10V.‣ Häiriöarvo = 30: Virtasäädinjänniterajalla‣ Häiriöarvo = 40:Epäjohdonmukaisuuksia tunnistettujentietojen joukossa, ainakin yksi tunnistusepäonnistui.‣ Prosenttiluvut laskettu impedanssista Zb= Vmot,nim / juuri(3) / Imot,nim‣ Moottoritietojen tunnistus epäonnistui‣ Häiriöarvo =0: Optimoinnin säätöaika onylittynyt‣ Häiriöarvo =1: Epäjohdonmukaisetlukemat‣ Luku- tai kirjoitusvirhe tallettaessaparametrejä.Tarkista, että:0: Taajuusmuuttajaan on kytketty moottori.1 – 40: Parametrit P304 – 311 ovat oikein.Moottorikytkentä on oikea (tähti, kolmio).Palauttaminen tehdasasetuksiin ja uusiparametrointi.Vaihda taajuusmuuttaja.‣ Lukuhäiriö initialisointi-tiedoista tai tietoei kelpaa.Vaihda taajuusmuuttaja.‣ Lukuhäiriö IO EEPROM-tiedoista tai tieto Tarkista tiedot.ei kelpaa.Vaihda I/O-kortti.‣ Väärä IO kortti on kytkettyTarkasta tiedot.‣ Ei IO kortin tunnistusta, ei tietoa. Vaihda I/O-kortti.‣ Sisäinen tietoliikennevirhe. Jos häiriötila jatkuu, vaihda taajuusmuuttaja.Ota yhteyttä huoltoon.‣ Ei ohjearvoja tietoliikennekortista (CB) Tarkista tietoliikennekortti (CB) ja yhteys.sähkeen valvonta-aikana.‣ Ei ohjearvoja tietoliikennekortista (CB) Tarkista USS-masteri.sähkeen valvonta-aikana.‣ Ei ohjearvoja USS:stä sähkeen valvontaaikana.Tarkista USS-masteri.‣ Vaurioitunut johto.Tarkista analogitulot.Off2‣ Signaali määriteltyjen rajojenulkopuolella.‣ Ulkoinen häiriö digitalitulojen kautta. Off2‣ Enkooderilta tuleva signaali on kadonnut(tarkasta häiriöarvo r0949)Häiriöarvo =0: Signaali enkooderilta kadonnutHäiriöarvo =5: Enkooderia ei ole konfiguroitu(P0400), mutta vektorisäätö on kytketty (P1300=21tai 23)Häiriöarvo =6: Enkooderimoduulia ei löydy, mutta onkonfiguroitu (P0400)Tarkista, että:1. Enkooderin ja taajuusmuuttajan välinen yhteyson kunnossa.2. Enkooderi ei ole virhetilassa (P1300=0, ajokiinteällä nopeudella, tarkasta enkooderin signaalir0061)3. Nosta enkooderin taajuustasoja (P0492)‣ Ohjelmistovirhe tai vika prosessorissa. Suorita itsetestausrutiinit. Off2Off2Off2Off2Off2Off2Off2Off2Off2Off2Off2Off2150MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Häiriönumero Mahdollinen syy Diagnoosi ja korjaustoimi ReaktioF0221PID-takaisinkytkentämin. arvonalapuolellaF0222PID-takaisinkytkentämaks.arvon yläpuolellaF0450BIST-testivirheF0452Hihnahäiriö havaittu‣ PID-takaisinkytkentä alle minimiarvonP545.‣ PID-takaisinkytkentä maksimiarvonP544 yläpuolella.‣ Häiriöarvo:‣ 1. Jotkin teho-osan testeistäepäonnistuivat.‣ 2. Jotkin ohjauskortin testeistäepäonnistuivat.‣ 4. Jotkin funktionaaliset testitepäonnistuivat.‣ 8. Jotkin IO-moduulin testeistäepäonnistuivat. (MM 420 ainoastaan)‣ 16. Sisäinen RAM-muisti kaatuikytkemistestin yhteydessä.‣ Moottorin kuormitusolosuhteet osoittavathihnavikaa tai mekaanista vikaa.Muuta parametrin P545 arvoa. Säädätakaisinkytkennän vahvistusta.Muuta parametrin P545 arvoa. Säädätakaisinkytkennän vahvistusta.Laite toimii, mutta tietyt ominaisuudet eivät toimioikein.Vaihda taajuusmuuttaja.Tarkista, että:1. Rikkoutumisia ei ole, pulssijono ei puutu eikämoottorin pyörimistä ole estetty.2. Ulkoinen nopeusanturi toimii moitteettomasti,jos käytössä.3. Parametreille P0402 (pulsseja minuutissanimellisnopeudella), P2164(hystereesitaajuuden poikkeama) ja P2165(sallitun poikkeaman viiveaika) on asetettuoikeat arvot.4. Parametreille P2155 (kynnystaajuus f1), P2157(kynnystaajuus f2), P2159 (kynnystaajuus f3),P2174 (ylempi kynnysmomentti 1), P2175(alempi kynnysmomentti 1), P2176(T_momentti viiveaika), P2182 (ylempikynnysmomentti 2), P2183 (alempikynnysmomentti 2), P2184 (ylempikynnysmomentti 3) ja P2185 (alempikynnysmomentti 3) on asetettu oikeat arvot.Voitele tarvittaessa.Off2Off2Off2Off2MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005151
Häiriönumero Mahdollinen syy Diagnoosi ja korjaustoimi ReaktioA0501VirtarajaA0502YlijänniterajaA0503AlijänniterajaA0504TaajuusmuuttajanylilämpöA0505TaajuusmuuttajanI2TA0506TaajuusmuuttajankäyttöjaksoA0511Moottorin ylilämpöA0512MoottorinlämpösignaalipuuttuuA0520TasasuuntausyksikönylilämpöA0521YmpäristönylilämpöA0522I2C mittauksenaikavalvontaA0523UlostulohäiriöA0535Jarrutusvastuskuumana‣ Moottorin teho ei vastaataajuusmuuttajan tehoa.‣ Moottorin kaapelit ovat liian lyhyet.‣ Maasulku.‣ Ylijänniteraja on ylitetty.‣ Tämä häiriö voi esiintyä jarrutuksenaikana, jos välipiirisäädin on kytkettypois päältä (P1240 = 0).‣ Verkkosyöttö liian alhainen.‣ Verkkosyöttö (P0210) ja siitä johtuenmyös välipiirijännite (r0026) allemääritellyn rajan (P2172).‣ Taajuusmuuttajan jäähdytyslevynlämpötilan varoitusraja (P0614) onylittynyt, minkä seurauksenakytkentätaajuutta ja/tai lähtötaajuuttapienennetään (parametrin P0610asetuksista riippuen).‣ Varoitustaso ylittynyt; virtapienennetään, jos niin on asetettu(P0610 = 1).‣ Jäähdytyslevy ja IGBT-liitoksenlämpötila ylittää varoitusrajan.‣ Moottori ylikuormitettu.‣ Kuormituksen käyttöjakso liian pitkä.‣ Johtokatkos moottorin lämpötilaanturissa.Jos johtokatkosta havaitaan,lämpötilavalvonta siirtyy seuraamaanlaskelmallista moottorilämpötilamallia.‣ Tasasuuntaajan lämpötilan hälytysrajaon ylittynyt‣ Ympäristön lämpötilan hälytysraja onylittynytTarkista, että:1. Moottoriteho (P0307) vastaa taajuusmuuttajantehoa (P0206).2. Kaapelipituusraja ei ole ylitetty.3. Moottorikaapeleissa tai moottorissa ei oleoikosulkuja tai maasulkuja.4. Moottoriparametrit ovat käytössä olevanmoottorin mukaiset.5. Käämivastuksen (P0350) arvo on oikein.6. Mikään ei estä moottorin pyörimistä eikämoottori ole ylikuormitettu.Suurenna kiihdytysaika.Pienennä asetettua jännitteenlisäystä.Jos tätä varoitusta näytetään jatkuvasti, tarkastalaitteen tulojännite.Tarkista verkkosyöttöjännite (P0210). --Tarkista, että:1. Ympäristölämpötila on määriteltyjen rajojensisällä.2. Kuormitusolosuhteet ja käyttöjakso ovat oikeinasetettu.3. Laitetuuletin pyörii, kun taajuusmuuttaja onkäynnissä.Tarkista, että käyttöjakso on määriteltyjen rajojensisällä.Tarkista, että käyttöjakso ja kuormituspiikki ovatmääriteltyjen rajojen sisällä.Tarkista moottorilämpötilan varoitustaso (P0604) jaympäristön lämpötilataso (P0625).Jos (P0601=0 tai 1) tarkasta seuraavat asiat:1. Tarkasta moottorin kilpiarvot (tee tarvittaessapikakäyttöönotto)2. Tarkenna tiedot tekemällä moottorin identifiointi(P1910=1)3. Tarkasta onko moottorin paino (P0344) järkeväja muuta tarvittaessa4. Ylilämpöparametrit (P0626, P0627 ja P0628)voidaan tarvittaessa muuttaa ellei käytössä ole<strong>Siemens</strong> moottoriaJos (P0601=2) tarkasta seuraavat asiat:1. Tarkasta onko moottorin lämpötila (r0035)järkevä2. Tarkasta onhan käytössä KTY84-anturitTarkista, että:1. Ympäristön lämpötila on käyttöohjeensallimissa rajoissa.2. Kuormitus ja käyttö ovat sopivat3. Tuuletin pyörii, kun taajuusmuuttaja käy.Tarkista, että:1. Ympäristön lämpötila on käyttöohjeensallimissa rajoissa.2. Tuuletin pyörii, kun taajuusmuuttaja käy3. Tuulettimen sisääntuloilma ei ole estettynä.‣ Syklinen valvonta transistorin ylivirran jaylilämpövalvonnan i2c väylän kautta (FXja GX -mallit) on estynyt--‣ Yksi ulostulovaihe on kytkemättä. Virhe voidaan tarvittaessa maskata pois. ----------------------152MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
Häiriönumero Mahdollinen syy Diagnoosi ja korjaustoimi ReaktioA0541MoottoritietojentunnistaminenaktivoituA0542Nopeussäädönoptimointi aktiivinenA0590TakaisinkytkennänsignaalihäiriönvaroitusA0600RTOSpäällekkäisyysvaroitusA0700CB varoitus 1 ks.yksityiskohdat CB -käyttöohjeesta.A0701CB varoitus 2 ks.yksityiskohdat CB -käyttöohjeesta.A0702CB varoitus 3 ks.yksityiskohdat CB -käyttöohjeesta.A0703CB varoitus 4 ks.yksityiskohdat CB -käyttöohjeesta.A0704CB varoitus 5 ks.yksityiskohdat CB -käyttöohjeesta.A0705CB varoitus 6 ks.yksityiskohdat CB -käyttöohjeesta.A0706CB varoitus 7 ks.yksityiskohdat CB -käyttöohjeesta.A0707CB varoitus 8 ks.yksityiskohdat CB -käyttöohjeesta.A0708CB varoitus 9 ks.yksityiskohdat CB -käyttöohjeesta.A0709CB varoitus 10 ks.yksityiskohdat CB -käyttöohjeesta.A0710CB tietoliikennevirheA0711CB konfigurointivirhe‣ Moottoritietojen tunnistaminen (P1910)valittu tai käynnissä.‣ Nopeussäädön optimointi (P1960) onvalittu tai käynnissä.‣ Enkooderilta tuleva signaali onkadonnut; taajuusmuuttaja saattaa ollakytkettynä anturittomaan vektorisäätöön(tarkasta häiriäarvo r0949)Anna taajuusmuuttajalle käynnistyskäsky.Käynnistyskäsky pidetään päällä tunnistuksenaikana.Pysäytyä taajuusmuuttaja ja tarkasta onko enkooderiliitetty. Jos enkooderi on liitetty ja r0949 =5: valitseenkooderin tyyppi P0400.Jos enkooderi on kytketty ja r0949 =6: tarkastaenkooderin ja moottorin kytkennät.Jos enkooderi ei ole kytketty ja r0949 =5: valitseanturiton vektorisäätö (P1300=20 tai 22)Jos enkooderia ei ole kytketty ja r0949=6, valitseP0400=0Tarkista, että:1. Enkooderin ja taajuusmuuttajan välinen yhteyson kunnossa.2. Enkooderi ei ole virhetilassa (P1300=0, ajokiinteällä nopeudella, tarkasta enkooderin signaalir0061)3. Laske enkooderin häviökynnystä (P0492)‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekorttikohtainen. Ks. Tietoliikennekortin (CB) käyttöohje (käyttäjänkäsikirja).‣ Tietoliikennekortin (CB) yhteys ei toimi. Tarkista CB-yksikkö. --‣ Tietoliikennekortti ilmoittaakonfigurointivirheestä.Tarkista CB-parametrit. ------------------------------MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005153
Häiriönumero Mahdollinen syy Diagnoosi ja korjaustoimi ReaktioA0910Udc-maks -säädinestettyA0911Udc-maks. -säädinaktivoituA0912Udc-min -säädinaktivoituA0920AD-muuntimenparametrit eivätasetettu oikeinA0921DA-muuntimenparametrit eivätasetettu oikeinA0922Taajuusmuuttajaa eikuormitetaA0923Sekä ryömintä(JOG) vasemmalle,että ryömintäoikealle ovatvoimassaA0936PID automaattisäätöaktiivinenA0952Hihnahäiriö havaittu‣ Udc maks.-säädin on estetty, koskasäädin ei pysty pitämäänvälipiirijännitettä (r0026) rajojen sisällä(P2172).‣ Verkkosyötejännite (P0210) on jatkuvastiliian suuri.‣ Kuorma pyörittää moottoria, aiheuttaenmoottorin siirtymisen regenaratiiviseentilaan.‣ Esiintyy jos huimamassa on suurijarrutuksen aikana.‣ Udc maks. -säädin aktivoitu; jarrutus-ajatkasvavat automaattisesti, jottavälipiirijännite (r0026) pysyisi rajojensisällä (P2172).‣ Udc min. -säädin aktivoituu, josvälipiirijännite (r0026) laskee minimirajanalapuolelle (P2172).‣ Moottorin kineettinen energia käytetäänvälipiirijännitteen puskurointiin,aiheuttaen moottorin hidastumista!‣ Lyhyet verkkokatkokset eivät siisvälttämättä johda alijännitehäiriöön.‣ AD-muuntimen parametreille ei saisiasettaa keskenään samoja arvoja, koskatämä johtaa epäloogisiin tuloksiin.‣ Indeksi 0: Lähdön parametrit identtiset.‣ Indeksi 1: Tulon parametrit identtiset.‣ Indeksi 2: Tulon parametriarvot eivätvastaa AD-muuntimen tyyppiä.‣ DA-muuntimen parametreille ei saisiasettaa keskenään samoja arvoja, koskatämä johtaa epäloogisiin tuloksiin.‣ Indeksi 0: Lähdön parametrit identtiset.‣ Indeksi 1: Tulon parametrit identtiset.‣ Indeksi 2: Tulon parametriarvot eivätvastaa DA-muuntimen tyyppiä.‣ Taajuusmuuttajaa ei kuormiteta.‣ Tämän tuloksena jotkut toiminnot eivättoimi kuten normaaleissakuormitustilanteissa.‣ Sekä ryömintä vasemmalle että ryömintäoikealle -signaalit (P1055/P1056)voimassa samanaikaisesti. Tämäpysäyttää ohjearvointegraattorin (RFG)lähtötaajuuden senhetkiseen arvoon.‣ PID automaattisäätö (P2350) valittu taikäynnissä‣ Moottorin kuormitusolosuhteet osoittavathihnavikaa tai mekaanista vikaa.Tarkista, että:1. Tulojännite (P0756) on rajojen sisällä.2. Kuormitus on oikea.Joissakin tapauksissa käytä jarrutusvastusta.Tarkista, että:1. Rikkoutumisia ei ole, pulssijono ei puutu eikävetolaite ole estetty.2. Ulkoinen nopeusanturi toimii moitteettomasti,jos käytössä.3. Parametreille P0402 (pulsseja minuutissanimellisnopeudella), P2164(hystereesitaajuuden poikkeama) ja P2165(sallitun poikkeaman viiveaika) on asetettuoikeat arvot.4. Parametreille P2155 (kynnystaajuus f1), P2157(kynnystaajuus f2), P2159 (kynnystaajuus f3),P2174 (ylempi kynnysmomentti 1), P2175(alempi kynnysmomentti 1), P2176(T_momentti viiveaika), P2182 (ylempi kynnysmomentti2), P2183 (alempi kynnysmomentti 2),P2184 (ylempi kynnysmomentti 3) ja P2185(alempi kynnysmomentti 3) on asetettu oikeatarvot.Voitele tarvittaessa.------------------154MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005155
LiitteetA – Käyttöpaneelin vaihtaminen12Fn1P034Fn01P1PFn0156MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
B – Laitekuorien irrottaminen: laitekoko A1 234MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005157
C – Ohjauskortin irrottaminen!Huomautuksia:1. Ohjauskortin kiinnikkeen irrottamiseen riittää, että kevyesti painaa sitä.2. Tällä hetkellä kaikki ohjauskortit irrotetaan samalla tavalla, laitteen koostariippumatta.158MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
D – Laitekuorien irrottaminen: laitekoot B ja C!"# $MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005159
E – Laitekuorien irrottaminen: laitekoot D ja E!160MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
F – Laitekuorin irrottaminen: laitekoko F19 mm AF!MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005161
G - ‘Y’-kondesaatorin irrottaminen: laitekoko A12LK 700162MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
H - ‘Y’- kondesaatorin irrottaminen: laitekoot B ja C!MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005163
I - ‘Y’- kondesaatorin irrottaminen: laitekoot D ja ET20Torque DriverM4Screw13 mm AF164MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
J - ‘Y’- kondesaatorin irrottaminen: laitekoko FT30Torque DriverM6MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005165
K – Soveltuvat standarditEuroopan pienjännitedirektiiviMICROMASTER-laitemallisto on pienjännitedirektiivin 73/23/EEC jasitä muuttavan direktiivin 98/68/EEC määräysten mukainen.Laitteet on sertifioitu seuraavien standardien mukaisiksi:Puolijohdetaajuusmuuttajat – Yleiset vaatimukset javerkkokommutoidut taajuusmuuttajatEN 60204-1 Koneiden turvallisuus – koneiden sähkölaitteetEuroopan konedirektiiviMICROMASTER-taajuusmuuttajasarja ei kuulu Konedirektiivinpiiriin. Nämä laitteet on kuitenkin tarkastettu oleellisin osindirektiivin terveys- ja turvallisuusmääräysten mukaisiksi, kun näitälaitteita käytetään tyypillisissä konesovelluksissa. Yhtiön antamavakuutus on saatavissa erikseen pyydettäessä.Euroopan EMC-direktiiviKun laite asennetaan käyttöohjeen suositusten mukaisesti,MICROMASTER täyttää kaikki EMC-direktiivin vaatimuksetsellaisina kuin ne on määritelty suurtehokäytön EMCtuotestandardissaEN61800-3.Underwriters LaboratoriesUL- ja CUL -LUETTELOITU SÄHKÖTEHON MUUNTAVA LAITE5B33 käytettäväksi likaantumisluokan 2 mukaisessa ympäristössä.ISO 9001<strong>Siemens</strong> plc-tuoteryhmä käyttää laadunhallintajärjestelmää, joka onISO 9001-standardin vaatimusten mukainen.166MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005
L - LyhenneluetteloAOPACAINBOPCTDCDINEECELCBEMCEMIFAQFCCFCLIGBTI/OLCDLEDPIDPLCPTCRCCBRCDRPMSDPVTAdvanced Operator Panel, TekstipaneeliAlternating Current, vaihtovirta/-jänniteAnalog Input, analoginen tuloBasic Operator Panel, PeruskäyttöpaneeliConstant Torque, vakiomomenttiDirect Current, tasavirtaDigital Input, digitaalituloEuropean Economic Community, ETY Euroopan talousyhteisöEarth Leakage Circuit Breaker, maavuotopiirikatkaisinElectro-Magnetic Compatibility, sähkömagneettinen yhteensopivuusElectro-Magnetic Interference, sähkömagneettinen häiriöFrequently Asked Question, usein kysytyt kysymyksetFlux Current Control, kenttävirtasäätöFast Current Limitation, nopea virtarajoitusInsulated Gate Bipolar Transistor, eristettyhilainen bipolaaritransistoriInput and Output, tulo ja lähtöLiquid Crystal Display, nestekidenäyttöLight Emitting Diode, valodiodiProportional, Integral And Differential, proportionaalinen,integraalinen ja differentiaalinenProgrammable Logic Controller, ohjelmoitava logiikkaPositive Temperature Coefficient, positiivinen lämpötilakerroinResidual Current Circuit BreakerResidual Current Device,Revolutions Per Minute, kierrosta minuutissaStandard Display Panel, TilanäyttöpaneeliVariable Torque, neliöllinen momenttiMICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005167
Kuva laitteistaLaitekoko ALaitekoot B & CTilanäyttöpaneelin(SDP) kanssaAnaloginenasetusDIP -kytkinAnaloginenasetusDIP -kytkinI/O -paneeliTaajuudenasetusDIP -kytkinTaajuudenasetusDIP -kytkinOhjauskorttiTeholiittimet168MICROMASTER <strong>440</strong>Käyttöohje ja parametrit09/2005