

Cours 2 : Imagerie active
Cours 2 : Imagerie active
Cours 2 : Imagerie active

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
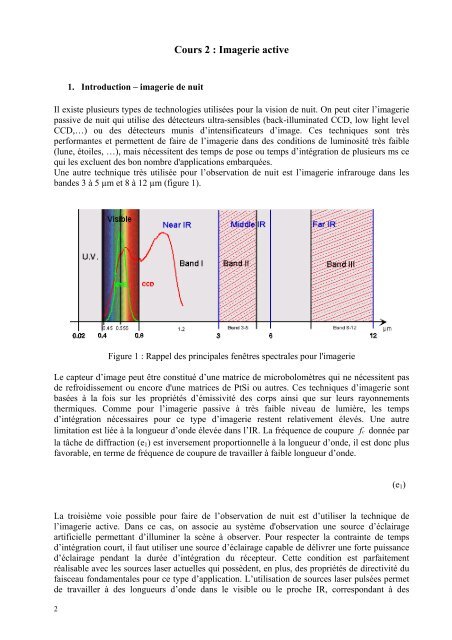
<strong>Cours</strong> 2 : <strong>Imagerie</strong> <strong>active</strong>1. Introduction – imagerie de nuitIl existe plusieurs types de technologies utilisées pour la vision de nuit. On peut citer l’imageriepassive de nuit qui utilise des détecteurs ultra-sensibles (back-illuminated CCD, low light levelCCD,…) ou des détecteurs munis d’intensificateurs d’image. Ces techniques sont trèsperformantes et permettent de faire de l’imagerie dans des conditions de luminosité très faible(lune, étoiles, …), mais nécessitent des temps de pose ou temps d’intégration de plusieurs ms cequi les excluent des bon nombre d'applications embarquées.Une autre technique très utilisée pour l’observation de nuit est l’imagerie infrarouge dans lesbandes 3 à 5 µm et 8 à 12 µm (figure 1).Figure 1 : Rappel des principales fenêtres spectrales pour l'imagerieLe capteur d’image peut être constitué d’une matrice de microbolomètres qui ne nécessitent pasde refroidissement ou encore d'une matrices de PtSi ou autres. Ces techniques d’imagerie sontbasées à la fois sur les propriétés d’émissivité des corps ainsi que sur leurs rayonnementsthermiques. Comme pour l’imagerie passive à très faible niveau de lumière, les tempsd’intégration nécessaires pour ce type d’imagerie restent relativement élevés. Une autrelimitation est liée à la longueur d’onde élevée dans l’IR. La fréquence de coupure f c donnée parla tâche de diffraction (e 1 ) est inversement proportionnelle à la longueur d’onde, il est donc plusfavorable, en terme de fréquence de coupure de travailler à faible longueur d’onde.(e 1 )La troisième voie possible pour faire de l’observation de nuit est d’utiliser la technique del’imagerie <strong>active</strong>. Dans ce cas, on associe au système d'observation une source d’éclairageartificielle permettant d’illuminer la scène à observer. Pour respecter la contrainte de tempsd’intégration court, il faut utiliser une source d’éclairage capable de délivrer une forte puissanced’éclairage pendant la durée d’intégration du récepteur. Cette condition est parfaitementréalisable avec les sources laser actuelles qui possèdent, en plus, des propriétés de directivité dufaisceau fondamentales pour ce type d’application. L’utilisation de sources laser pulsées permetde travailler à des longueurs d’onde dans le visible ou le proche IR, correspondant à des2
fréquences de coupure (liées à la diffraction) supérieures à celles obtenues dans le cas del’imagerie IR. Le grand avantage de cette technique est qu’elle permet de travailler même enl’absence totale de lumière (ciel couvert de nuit).C’est cette technique que nous allons étudier.2. Principe de l'imagerie <strong>active</strong>Emetteurθ∆tRécepteurFOVFigure 2: illumination de scènes et réception d'imagesExemple de système d'imagerie <strong>active</strong> à crénelage temporel (ISL)La technique de l’imagerie <strong>active</strong>, qui consiste à associer au système d’imagerie sa propre sourced’éclairage, comporte plusieurs variantes.La variante la plus simple consiste à éclairer la scène en continu et à limiter le temps de pose encommandant la caméra par un obturateur.On peut aussi éclairer la scène en mode impulsionnel (correspondant au temps de pose) etmaintenir la caméra ouverte en mode acquisition continue. Ce type de fonctionnement est parcontre très sensible aux lumières parasites provenant de la scène.Pour éliminer le problème des lumières parasites et pour augmenter l’efficacité de l’éclairage, onsynchronise l’éclairage avec l’ouverture de la caméra (∆t=0). Dans ce mode de fonctionnementle temps d’ouverture de la caméra correspond à la durée de l'impulsion d'éclairage.Lorsqu'on synchronise l'ouverture de la caméra avec l'émission laser, la rétrodiffusion de lalumière sur les particules présentes dans l'atmosphère (brouillard, poussière,…) vient perturber la3
qualité d'image (effet feux de route dans le brouillard) et la diffusion avant vient atténuer lesignal de retour (voir cours sur la télémétrie impulsionnelle).Pour contourner ces limitations on a recours à une technique appelée crénelage temporel (figure3) ou "range-gating" qui est basée sur le temps de vol d’une très courte impulsion de lumière (del'ordre de la ns). Dans ce cas on va décaler temporellement l'émission laser et l'ouverture de lacaméra (∆t≠0).Fig. 3 : Principe de fonctionnement du crénelage temporelLe principe de fonctionnement du crénelage temporel est le suivant :Au départ, à t 0 , la caméra est fermée par son obturateur ; à t 1 , l’impulsion laser est émise endirection de la scène, l’obturateur est toujours inactif, la caméra n’est pas affectée par la lumièrerétro-diffusée par les particules atmosphériques. A t 2 , l’impulsion laser qui s’est propagéejusqu’à la scène est réfléchie en direction de la caméra. A ce moment, l’obturateur est toujoursinactif. A t 3 , la lumière réfléchie par la scène atteint la caméra, l’obturateur est ouvert de façon àrécupérer cette image. Le délai entre l’émission de l’impulsion laser et l’activation del’obturateur est déterminé de sorte que la caméra ne voit que l'information provenant de la scène.Le temps d’ouverture (s’il est supérieur à la durée de l’impulsion) de la caméra détermine laprofondeur de scène qui sera enregistrée. A l’instant t 4 , l’obturateur est de nouveau inactif, desorte que la caméra reste protégée de la lumière parasite.Cette technique complexe est recommandée lorsque l’on veut faire de l’imagerie dans desconditions atmosphériques difficiles telles que brouillard, tempête de neige, nuage de poussière,fumée,…Avant de passer à l'aspect théorique, une illustration des performances de cette technique estdonnée sur la figure 4 qui représente une même scène enregistrées de nuit pendant une tempêtede neige avec et sans crénelage temporel.4
Fig. 4 : Images enregistrées lors d'une tempête de neige(avec et sans crénelage temporel)3. Equations de liaison3.1 Eclairement dans le plan imageFigure 5 : Rétrodiffusion de l'impulsionReprenons l'équation (e 10 ) (qui devient (e 1 ) ici) de la télémétrie qui définit l'éclairementénergétique E en [W.m -2 ] d'une surface réceptrice A après éclairement d'une surface S par unfaisceau laser selon la figure ci-dessus.(e 1 )Avec :R : Coefficient de réflexion ou Albédo de la cibleP : Puissance en [W] du laser d'éclairage−τ : Transmission de l'atmosphère, avec : τ = e αdd : Distance système cibleA travers une optique de focalisation (objectif), on définit l'éclairement énergétique dans le planimage par :(e 2 )5
avec, (e 1 ) devient, φ étant la pupille de l'objectif :(e 3 )Cette équation montre que si l'on veut augmenter l'éclairement dans le plan image, il fautaugmenter la puissance du laser d'éclairage ou augmenter la pupille d'entrée de l'objectif.S im étant lié à S par les caractéristiques de l'objectif qui sont sa pupille φ et sa focale f, on peutécrire :on peut écrire (e 3 ) sous la forme :(e 4 )Ces équation ne sont valables que dans le cas où la divergence du faisceau laser d'éclairage eststrictement superposée au champ de vue de l'optique (illustration de la figure 2).3.2 Qualité d'image3.2.1. La Fonction de Transfert de Modulation théorique et expérimentaleLe niveau de détail nécessaire dans une image dépend du type de mission et du type de cible. Larésolution nécessaire pour un système est croissante suivant que l'on désire Détecter, Reconnaîtreou Identifier un objet dans une image. Le critère de Johnson et le STANAG 3769 sont deuxnormes de résolution utilisées par les militaires. Ces normes décrivent pour chaque mission ettype de cible, la résolution nécessaire ou le nombre de points élémentaires dans une dimensionde cible, soit : Détection 1 lp/dmc, Reconnaissance 4 lp/dmc, Identification 6,4 lp/dmc (lp : lignepair, dmc : dimension minimale cible)Les performances du système, du point de vue de la résolution, seront décrites et caractériséespar la fonction de transfert de modulation. La figure 7 décrit le principe de la FTM.6
Fig. 6 : Principe de la FTMPour une mire sinusoïdale de fréquence f x , la FTM quantifie le contraste avec lequel le systèmedonne une image de cette mire. Pour tous les systèmes, la FTM est, par définition, toujours égaleà 1 pour la fréquence nulle (par exemple un bord de plage) et les fréquences plus élevées seronttransmises avec un contraste de plus en plus faible, jusqu'à atteindre la fréquence limite decoupure f c . La courbe donne l'allure générale d'une FTM. En abscisse, on aura la fréquencespatiale d'entrée définie en paire de lignes par mm (lp/mm) ou en paire de lignes par milliradians(lp/mrad). En ordonnée, le contraste sera défini entre 0 et 1.Du point de vue pratique, les mires sinusoïdales étant difficiles à reproduire avec la qualitérequise, nous utilisons des mires constituées de traits rectilignes, parallèles et équidistants, àprofil rectangulaire. Le fait d'utiliser des lignes à profil rectangulaire conduit à la fonction detransfert de contraste (CTF). Le passage de la CTF à la FTM se fait par un calcul de combinaisonlinéaire de CTF, tel que :CTF(kfx)FTM ( fx)= Bk4π (ek5 )∑ ∞k =1où k prends les valeurs impaires 1, 3, 5,… et B k est égal à –1 ou 1 selon :k −1m 2B = ( −1)( −1)pour r =kmetB k= 0 pour r
Fig. 7 : Principe de la mesure de la FTMOn présente d'abord au système un bord de plage qui sert de référence, puis des mires de plus enplus serrées (donc des fréquences spatiales de plus en plus grandes). Le contraste des profils estmesuré directement sur le signal vidéo d'une caméra CCD à l'aide d'un oscilloscope. Il fautdécrire ici quelques précautions importantes :- Pour éviter tout problèmes dû à la discrétisation de l'information par le capteur, unebarre de la mire la plus petite devra couvrir plusieurs pixels.- La mesure du contraste des profils doit se faire directement sur le signal vidéo à l'aided'un oscilloscope doté d'un trigger ligne. Toute mesure de contraste faite sur une imageacquise par un système d'acquisition d'images serait biaisée, car elle contiendrait lafonction de transfert de la carte d'acquisition.- La taille de la série des mires présentée au système (en progression k f x ) est adaptée àchaque système étudié, de façon à bien couvrir les possibilités du système depuis lafréquence la plus basse jusqu'à la fréquence de coupure.- L'éclairage des mires se fait à la longueur d'onde à laquelle on souhaite qualifier lesystème.La figure 7 illustre également la correspondance entre le contenu fréquentiel de l'objet et celui del’image obtenue à travers le système. En règle générale, le contenu fréquentiel dans le plan objet(f po ) est exprimé en paire de lignes (lp) par mrad. On a :où d po est la taille d'une paire de lignes en m et d la distance en m. Pour établir les performancesdu système, c’est généralement à partir du contenu fréquentiel dans le plan image que sonteffectués nos calculs. On doit donc ramener le contenu fréquentiel dans le plan objet à sonéquivalent dans le plan image (f im ) à l’aide de la relation suivante :(e 6 )(e 7 )8
Si f po est exprimé en lp/mrad, f' la focale du système doit être exprimée en m pour avoir f im enlp/mm.3.2.2. FTM du système global : Modèle théoriqueLe modèle théorique du système d'imagerie <strong>active</strong> est basé sur l’approximation initiale quechaque élément a une réponse linéaire. Cette approximation permet d’utiliser les outilsdéveloppés par la théorie des systèmes linéaires pour modéliser le comportement du systèmeglobal à partir des réponses de chacun de ces éléments. Il est alors possible de définir pourchacun des éléments du système (figure 8), une équation qui correspond à la fonction de transfertdans le domaine des fréquences spatiales.AffichageOptique d'imagerieréfr<strong>active</strong>ou réflectiveIntensificateurd'imageCaméraCCD9Elémentde relaisFig. 8 : Diagramme synoptique du système de détectionEn multipliant les FTM de chacun des éléments constituant le système, on obtient la réponseglobale du système.Le système est uniquement modélisé dans le domaine spatial, on néglige le comportementtemporel. Cette approximation reste valable pour des temps de pose courts. Etant donné quel’ensemble des calculs se fait dans le domaine des fréquences, il est fondamental de définir leursignification. L’analyse dans le domaine des fréquences spatiales est effectuée dans quatre plansdistincts : le plan objet, le plan image (ou plan de la photocathode de l'intensificateur), le planCCD et le plan affichage. Chacune de ces zones est définie par des fréquences spatiales qui luisont propres puisque le système effectue un agrandissement ou un rétrécissement de l’objet pourqu’il s’inscrive dans chacun des plans mentionnés.3.2.2.1. FTM simplifiée de l'optique d'imagerieUn système optique consiste en une succession de plusieurs lentilles et/ou miroirs de différentesfocales. Dans le cas de télescopes réflectifs, l'ouverture contient une occultation centrale due au(e 8 )
miroir secondaire. Dans tous les cas, le système optique d'imagerie sera considéré comme unelentille unique ayant la même longueur focale (f ') que l'objectif ou le télescope complet. Enpremière approximation, l'optique d'imagerie peut être considérée comme étant uniquementlimitée par la diffraction. Dans le cas d'une optique à ouverture circulaire, limitée par la diffraction, on a :(e 9 )où f c= ∅ / λ f ' est la fréquence de coupure optique du système ayant une longueurfocale f', ∅ est le diamètre de l’iris du système et λ est la longueur d’onde de travail. LaFTM optique est homogène pour les fréquences spatiales horizontales et verticales.3.2.2.2. FTM de l'intensificateur d'imageLors de l’achat d’un intensificateur de lumière, on ne dispose que de peu d’informations sur lesperformances de celui-ci. En général, on dispose du diamètre de l’intensificateur d’image etd'une valeur de fréquence exprimée en lp/mm qui correspond à la FTM à 5% ou à 50%(resFTM50%) suivant les constructeurs. La FTM d'un intensificateur peut être décrite par unesimple fonction gaussienne en première approximation. On aura :σ est défini à partir de la donnée FTM à 50%, tel que :(e 10 )3.2.2.3. FTM du système de couplageComme le système de couplage est généralement de très bonne qualité (diamètre des fibresinférieur à 5 µm), sa FTM ne sera pas incluse dans ce calcul. Par contre, on tiendra compte auniveau du CCD du rapport de grandissement donné par cet élément.3.2.2.4. FTM de la caméra CCDLa fonction de transfert sur un détecteur rectangulaire est définie par :où dpixelest la largeur ou la hauteur du pixel et fCCDla fréquence spatiale sur le plan CCD. Onnote que contrairement aux FTM présentées précédemment, la FTM de la caméra CCD pourra(e 11 )(e 12 )10
varier selon la direction puisque les pixels peuvent être de forme rectangulaire. Il conviendraalors de définir une FTM horizontale et une FTM verticale.En connaissant le diamètre de l’écran de phosphore composant la fenêtre de sortie del'intensificateur, il est possible de ramener le contenu fréquentiel du plan CCD au plan image(surface de l’écran de phosphore de l’intensificateur d’image) en trouvant les dimensions durectangle de 4 : 3 s’inscrivant dans le plan image tel que présenté sur la figure 9.Fig. 9 : Inscription d'un rectangle 4:3 sur la surface de l'écran de l'intensificateurLe passage des fréquences spatiales au plan image vers le plan CCD s’effectuera en utilisant lesrelations suivantes :(e 13 )où Dintest le diamètre de l’intensificateur d’image et Dx− CCD, Dy − CCDsont les dimensionshorizontales et verticales du CCD.3.2.2.5. FTM du système d'affichageLa FTM du système d'affichage ne sera utilisée que si on souhaite afficher l'image sur un écranTV. Dans le cas d'une application où l'image est directement traitée à la sortie du système, on netiendra pas compte de cet élément. La FTM du système d’affichage TV est définie à partir de lalargeur à mi-hauteur du faisceau du tube (spot-size) en utilisant l’approximation d’un faisceaugaussien :(e 14 )Où frasterest la fréquence spatiale sur la trame de l’écran et S le diamètre du faisceau (FWHM)Les expressions qui lient le contenu fréquentiel dans le plan affichage à celles dans le plan imagesont définies comme suit :(e 15 )11
où W et H sont respectivement la largeur et la hauteur de l’affichage sur l’écran, Dintest lediamètre de l’écran de phosphore de l’intensificateur d’image. L’expression de la FTM dusystème d’affichage peut alors être exprimée sous la forme suivante :(e 17 )Le diamètre du faisceau du tube n’apparaît généralement pas sur les fiches de spécificationstechniques des moniteurs vidéo, on peut cependant le déduire à partir du facteur limitant larésolution qui est soit la résolution du moniteur soit le format vidéo utilisé (EIA-170, NTSC,PAL, SECAM). Par exemple, les formats NTSC et EIA-170 ont une résolution de 525 ligneshorizontales (485 effectives) alors que les formats PAL et SECAM ont une résolution de 625lignes horizontales (575 effectives). Avec un rapport 4:3, on obtient 647 lignes verticales pourles formats PAL, SECAM. Dans le cas des formats vidéo, on spécifie la résolution à partir dunombre de lignes horizontales pouvant être affichées. Par contre dans le cas des moniteurs, il estd’usage de définir la résolution par le nombre de lignes verticales (nombre de colonnes) quipeuvent être affichées à l’écran. En général, un tube écran de basse résolution affichera 300lignes verticales alors qu’un système à haute résolution affichera plus de 550 lignes verticales.Par contre, un moniteur ayant une résolution supérieure à 650 lignes sera limité par le formatvidéo.Il conviendra alors de définir un "spot size" horizontal et un "spot size" vertical en supposantqu’il est égal à la dimension du pixel écran selon les relations suivantes :(e 18 )où NLV et NLH sont respectivement le nombre de lignes verticales et le nombre de ligneshorizontales qui peuvent être produites par le système d’affichage. On suppose ici un facteur deremplissage de 1 pour les pixels. Les images sont affichées sur un moniteur d’ordinateur. On doitcependant s’assurer que la résolution du moniteur est plus grande que celle des images, ce qui nepose pas de problèmes avec un moniteur SVGA (800 x 600).L’observateur représente un des points clés dans l’évaluation des performances d’un système.Bien qu’il existe des modèles permettant de prédire les performances d’un observateur, nous neles inclurons pas dans la simulation.3.2.3. Evaluation du rapport signal à bruitL'évaluation du rapport signal à bruit se fait de la façon suivante. On considère comme signall'image de l'objet que l'on souhaite détecter, et comme bruit son environnement. L'environnementest généralement constitué par l'arrière-plan sur lequel apparaissent les objets. La méthode decalcul utilise la réflectivité du fond et celle de la cible.12
Le SNR t-b de détection d'une cible par rapport à un fond est défini par :où Etarg etet Ebcgreprésentent les éclairements réfléchis par la cible et par le fond. Ethreshestl’éclairement correspondant à un SNR t-b =1 et FTM sys (f x ) est la fonction de transfert demodulation pour la fréquence spatiale f x .En utilisant l’approximation d’un faisceau circulaire de profil "flat top", l’éclairement incidentsur la cible est donné par E=P/S. Les éclairements réfléchis par la cible et par le fond dépendentdes coefficients de réflexion respectifs. D'après (e 4 ), on obtient :(e 19 )(e 20 )(e 21 )où ∅ représente la surface collectrice de l'optique d'imagerie, f' sa focale, τ opt sa transmission.R target et R bcg sont les coefficients de réflexion de la cible et du fond.4. Solutions technologiques4.1. La source de lumièrePour l'imagerie <strong>active</strong>, la source laser doit être capable d’émettre une forte puissance crêtependant des durées courtes (typiquement 200ns à quelques µs), avec une cadence de répétition aumoins égale à la fréquence vidéo. Le faisceau doit être directif , la longueur d’onde doitcorrespondre au maximum de sensibilité des détecteurs d’image que nous allons utiliser. Lesautres critères de sélection sont :• Le rendement optique-électrique• La compacité• La robustesse• La simplicité• Le coût de revientPour répondre au mieux à ces critères, une source de lumière incohérente de type flash n’est pasadaptée, seule une source laser peut convenir. Parmi les différents types de source laser, le laser àsemi-conducteur ou laser à diode semble répondre au mieux aux critères énoncés. Etant donnéque la cavité laser est directement intégrée au substrat, aucun réglage ni ajustement n’estnécessaire. Sa taille très réduite répond aux critères d’encombrement et de robustesse.Concernant le rendement optique/électrique, on a un gain d’au moins un ordre de grandeur par13
apport au laser à solide le plus performant. Enfin, le prix de revient reste très compétitif parrapport aux autres types de source laser.Dans le domaine des lasers à semi-conducteur, on trouve principalement deux familles : lesdiodes laser utilisées pour le pompage des lasers à solide et les diodes servant aux applicationsdes télécommunications. Ces dernières ont un spectre d’émission situé vers 1550 nm et despuissances d’émission faibles. Leur structure physique n’est souvent constitué que d’un seulémetteur. Les diodes conçues pour le pompage des lasers à solide émettent principalement vers800 nm et 980 nm. Les puissances disponibles sont beaucoup plus élevées. En mono-émetteurles puissances atteignent 2 watt en régime continu.Pour augmenter la puissance émise, on a recours à une technique qui consiste à juxtaposer lesémetteurs les uns à coté des autres sur une ligne (figure 9).Fig. 9 : Disposition linéaire des émetteursFig.10 : Disposition matricielle des émetteursDans ce cas, on appellera le composant une barrette de diodes. Pour augmenter encore lapuissance émise, on empile ces barrettes les unes sur les autres pour former une matrice (stack)de diodes laser (figure 10). Dans le cas des matrices de diodes laser, les puissances émisesatteignent plusieurs dizaines de watts en régime continu et jusqu’à plusieurs kilowatts en régimeimpulsionnel. Un inconvénient rencontré lors de l’utilisation de lasers à semi-conducteur est letraitement complexe du faisceau de sortie. En effet, le faisceau issu d’un émetteur à semiconducteurprésente une divergence asymétrique. La divergence suivant la plus grandedimension de l’émetteur (de 3 à 200 µm appelée aussi axe lent) a une valeur relativementconstante autour de 10° à mi-hauteur, celle suivant la plus petite dimension de l’émetteur (1µm)14
a également une valeur relativement constante autour de 40°. Ces caractéristiques font que l’onva devoir associer à l’utilisation d’une diode laser un système de collimation de faisceau.Dans le cas des matrices de diodes, la densité des émetteurs va déterminer la puissance moyenne.Une matrice possédant des émetteurs espacés va être plus facile à refroidir, elle pourra doncémettre une puissance moyenne plus importante. Sa brillance (puissance émise par unité desurface et par angle solide) va par contre être limitée, de même que l’encombrement total et larobustesse.4.2 La caméra intensifiée4.2.1. L'intensificateur de lumière4.2.1.1. PrincipeLe principe de l’intensificateur de lumière est de convertir par effet photo-émissif unrayonnement lumineux (l’image à amplifier) en signal électronique. Après amplification, cesignal est ensuite reconverti en lumière pour obtenir une image intensifiée. Ces trois étapes del'intensification sont la conversion optique-électronique, l’amplification et la conversionélectronique-optique. La première permet de générer des électrons dans le tube. La seconde lesamplifie. La troisième transforme l’énergie des électrons en un signal optique.Le tube intensificateur est constitué d’une enceinte sous vide, fermée aux deux extrémités pardes fenêtres optiques (figure 12). Sur les faces internes de ces fenêtres sont déposées, une couchephoto-émissive pour la fenêtre d’entrée (la photocathode) et une couche luminophore pour lasortie (l'écran).Fenêtre d’entréeFenêtre de sortieFlux incidente -Couche photo-émissiveCouche luminophoreFig. 12 : Schéma de principe du tube intensificateur15
Fig . 13 : Sensibilité spectrale de différents types de photocathodessuivant le substrat (d'après DEP)Fig. 14 : Exemples d'émission d’écran luminophore(d'après DEP)4.2.1.3. Les différents types d'intensificateurDans le monde industriel, l’habitude a été prise de classer les intensificateurs en catégories tenantcompte des évolutions techniques.4.2.1.3.1. Intensificateurs à accélération d’électrons – GEN 116
C’est le modèle le plus simple qui applique directement le principe de base (voir figure 15).Optique de focalisatione -e -PhotocathodeEcranPhotocathodeEcranfig. 15 : Schéma du tube intensificateur à accélération d'électronset de l'intensificateur de proximitéLa photocathode est déposée directement sous forme de couche sur la fenêtre d’entrée concave,l’écran sur la fenêtre de sortie, également concave.En appliquant une tension élevée (de l’ordre de 10 à 15 KV) entre ces deux dépôts, il se crée unchamp électromagnétique qui va accélérer les électrons émis par la photocathode vers l’écran.Cette accélération augmente l’énergie libérée lors de l’impact de l’électron sur la coucheluminophore.L’optique de focalisation, composée de pièces métalliques, a pour but de permettre aux électronsémis en un point particulier de la photocathode d’impacter un point donné de l’écran et ceindépendamment de l’angle d’émission. L’image obtenue sur l’écran peut directement êtreobservée à l’œil ou au moyen d’un oculaire. Celle-ci est monochrome (une seule couleur quidépend du luminophore utilisé) et inversée. Ceci est dû à la forme concave des fenêtres d’entréeet de sortie ainsi qu’au système de focalisation. Les intensificateurs dit de proximité évitent ceteffet d'inversion puisqu'ils utilisent des fenêtres planes. Ce deuxième type d'intensificateur degénération 1 a été développé en rapprochant la photocathode et l'écran de façon à utiliser leseffets de proximité. Les électrons émis viennent directement impacter l'écran et l'image n'est plusrenversée. C'est ce modèle qui a été amélioré pour donner la génération 2.Le gain en luminosité est fonction de l’énergie fournie aux électrons pendant leur accélération.Pour obtenir des images plus intenses, des intensificateurs à microcanaux sont utilisés.4.2.1.3.2. Intensificateurs à microcanaux – GEN 2Cette nouvelle génération de tubes comprend le modèle de base auquel a été ajouté un systèmede multiplication d’électrons. Cette multiplication est réalisée à l’aide de galettes à microcanaux,assemblage de tubes élémentaires de petit diamètre (4 à 25 µm) disposés en parallèle. La surfaceinterne des tubes élémentaires est recouverte d’un film réémetteur d’électrons, connectéélectriquement à chaque extrémité de la galette.17
Matériau à forte émission secondairee -V thFigure 16 : Tube élémentairePour créer un effet d’avalanche dans les tubes élémentaires, on utilise le principe de l’émissionsecondaire (figure 16). Celle-ci consiste à arracher un électron de la bande de conduction ou devalence du matériau avec un électron libre. Pour réaliser cette extraction, il faut que l’électronlibre possède une énergie suffisante qui lui est transmise par l’accélération entre la photocathodeet la face d’entrée de la galette à microcanaux. Dans le tube élémentaire, l’électron va percuter lasurface et arracher un électron secondaire. Lors du choc, il va perdre une partie de son énergie.Pour que le processus puisse se répéter jusqu'à la fin du tube élémentaire, il faut compenser cetteperte par la réaccélération de l’électron. Il existe un champ électromagnétique entre laphotocathode et la galette. Grâce à ce champ, l’électron réfléchi par la face d’entrée de la galetteest dirigé vers le tube élémentaire le plus proche.Il existe deux structures d’intensificateurs à microcanaux, l’une avec le modèle de base et l’autrequi utilise l’intensificateur dit à double focalisation de proximité (figure 17). La secondestructure est la plus répandue puisqu’elle est très compacte. En plaçant la galette de microcanauxtrès près des fenêtres d’entrée et de sortie, on utilise l’effet de proximité qui consiste à faireentrer les électrons émis par la photocathode directement dans les tubes élémentaires.Optique de focalisationGalette à microcanauxPhotocathode Galette à microcanaux Ecran Photocathode EcranFig. 17 : Intensificateur inverseur et à double focalisation de proximitéEn plaçant l’écran proche de la face de sortie de la galette, les électrons iront impacter sur leluminophore proche de la position de leur émission. Ainsi, l’image obtenue est plus intense etnon inversée. L’avantage de l’intensificateur dit à double focalisation de proximité, est d’avoirun gain important, d’être compact et de ne plus inverser l’image. Ces intensificateurs portent ladénomination "GEN 2".Les améliorations techniques et les connaissances des matériaux ont permis d'introduire sur lemarché à la fin des années 80, les intensificateurs de génération 3.18
4.2.1.3.3. Intensificateurs GEN 3Les tubes intensificateurs "GEN 3" sont virtuellement identiques aux intensificateurs àmicrocanaux, la différence réside dans l’utilisation d’un nouveau type de semi-conducteur pourla photocathode.Barrière ioniqueGalette à microcanauxPhotocathodeEcranFig.18 : Intensificateur "GEN 3"L’avantage de ces nouvelles photocathodes est qu’elles ont permis d’étendre le domaine spectralde l’intensificateur. L’inconvénient est que le matériau utilisé est chimiquement fragile et que levide dans les intensificateurs n’est pas total. Le gaz restant est ionisé par les champsélectromagnétiques existants entre les différents éléments (photocathode, galette et écran) et lesions ainsi créés détériorent le matériau constituant la photocathode. Afin d’éviter cela il a étérajouté une barrière ionique (figure 18) permettant leur capture. Cette barrière est constituée d'unfilm d'oxyde d'aluminium ou de magnésium placé sur la face d’entrée de la galette demicrocanaux. Ce film joue bien son rôle de barrière en capturant les ions mais présente aussil’inconvénient de bloquer les électrons de faible énergie, ce qui entraîne des pertes. Pourcompenser ces pertes, il faut augmenter la sensibilité de la photocathode (ce qui est réalisé avecces nouveaux semi-conducteurs) ainsi que son gain.C’est au cours des années 1990 qu’un nouveau modèle a fait son apparition sur le marché : lesintensificateurs de génération 4.4.2.1.3.4. Intensificateurs GEN 4Cette génération n’est pas vraiment une nouvelle évolution pour les intensificateurs, mais plusune action commerciale utilisée par les constructeurs. En réalité, chez certains fabricants le terme4 ème génération regroupe des intensificateurs de seconde et troisième génération munis decapteurs CCD (Coupled Charge Device). Chez d’autres fabricants, ce sont des intensificateurs detroisième génération dont certaines caractéristiques ont été améliorées (principalement le gain etla résolution). Néanmoins, cette technologie n'est pas encore accessible en Europe (sauf chezDEP) et réservé aux laboratoires nord-américains, ce matériel étant considéré comme sensible dupoint de vue militaire.En plus de toutes ces différentes générations, il existe des intensificateurs hybrides.19
4.2.1.3.7. Tableau récapitulatif des performancesComme nous l’avons vu précédemment, il existe trois catégories de caractéristiques principales.Les valeurs données dans ce paragraphe proviennent principalement de la société DEP. Lesphotocathodes étant communes à toutes les générations, il suffit de choisir la courbe desensibilité en fonction du domaine spectral souhaité. De la même façon, les écrans sontcommuns aux différentes générations, et leurs caractéristiques sont données par le tableauJEDEC qui se trouve en annexe A.3.2. On trouve couramment, pour les différents constructeurs,les écrans du type P11, P20, P43, P46 et P47. Les caractéristiques de l’ensemble sont décrites parle tableau figure 19.20
GénérationRésolution(lp/mm) àFTM de 5%Gain(cd/m 2 /lx)S/N(108 µlux)Durée de vie(heures)GEN1 30 - 300GEN2 32 – 34 100 - 1000 12 – 14 5000GEN3 45 - 48 3000 - 10000 18 – 20 10000GEN4 55 - 64 7000 - 10000 20 – 24 15000EBCCD4.2.2. Le capteur CCDFig. 19 : Performances des différents types d'intensificateur4.2.2.1. La sensibilité spectralePour permettre le choix des caractéristiques de l'écran de sortie de l'intensificateur, il estnécessaire de connaître la courbe de sensibilité spectrale du capteur CCD que l'on veut luiassocier. Celle-ci peut varier d'une caméra à l'autre, mais on retrouve toujours plus ou moinsl'allure générale de la courbe de sensibilité du silicium. La figure 20 montre deux relevéstypiques de sensibilité spectrale de caméra CCD.1000,0900,0800,0sensibilité relative700,0600,0500,0400,0300,0200,0100,00,0400 500 600 700 800 900 1000 1100lambda (nm)Sensibilité CCD sansfiltre IRSensibilité CCD avecfiltre21Fig. 20 : Sensibilité spectrale des caméras CCD avec et sans fenêtre "filtre IR"La courbe avec les points en triangle est en adéquation avec la sensibilité du silicium. C'est lacourbe de sensibilité des caméras CCD en général. Néanmoins, il peut arriver que certainsfabricants mettent un filtre IR devant le CCD pour rétablir la courbe de sensibilité de l'œil. Onperd alors la sensibilité au dessus de 800nm et l'image restituée par ce capteur ressemble à ce quevoit l'observateur humain (courbe bleue).Les relevés ont été réalisés à l'aide d'une source de lumière blanche étalonnée et d'unmonochromateur projetant un mince pinceau de lumière "monochromatique" à travers une fente
sur le capteur CCD à caractériser. Une carte de traitement d'image permet de quantifier lasensibilité du capteur aux différentes longueurs d'onde.4.2.2.2. Les différents modes de fonctionnementSuivant le CCD couplé à l'intensificateur, il faut distinguer différents modes de lecture du signalvidéo : le mode Field, le mode Frame, et le mode Progressive Scan.Même si c'est l'intensificateur qui détermine le temps de pose, une attention particulière doit êtreportée aux manipulations quant à la fréquence d'acquisition des images; les mesures (desensibilité, par exemple) ne sont correctes que si l'on acquiert une seule image par trame vidéo.Une fréquence trop élevée conduit à la superposition des images sur une trame et à des valeurserronées pour les mesures.Nous n'allons pas décrire ici les différents modes de fonctionnement des capteurs qui se trouventdans les documentations techniques.4.2.3. Le couplage intensificateur / CCDLa qualité du couplage entre l'écran et le capteur CCD est l'un des facteurs qui détermine lasensibilité et la qualité du système intensifié. La figure 21 montre que ce couplage peut se faire àl'aide de lentilles ou de faisceau de fibres optiques (bundle de fibres ou taper).Fig. 21 : Principe du couplage entre l'écran et le CCDL'optique d'imagerie a l'avantage de permettre le couplage entre l'écran et le CCD, même si lessurfaces à imager sont placées derrière une fenêtre en verre épais. La perte de lumière est, parcontre, élevée et liée à l'ouverture de l'optique employée. L'écran étant un diffuseur Lambertienhémisphérique, l'efficacité du couplage n'est que de 5% pour un grandissement de 1 avec uneoptique ouverte à f / 1.L'utilisation d'un taper de fibres nécessite le retrait de la fenêtre de protection de la surfacesensible de façon à pouvoir le coller directement sur la surface des photodiodes du CCD. Lafigure 22 montre une étape de cette manipulation.22
Fig. 22 : préparation d'un CCD pour le collage du taper.Le collage du taper est réalisé grâce à une colle optique photoréticulable (figure 23).Fig. 23 : Collage du taper sur une matrice CCDLe taper a l'avantage de récolter une grande partie de la lumière diffusée par l'écran, typiquement70%.Le tableau de la figure 24 donne les efficacités de couplage mesurées à l'ISL avec différentsmoyens de couplage. Les conditions expérimentales sont les suivantes :- temps de pose intensificateur GEN3 Hamamatsu à 50µs- gain commandé à 5V sur une échelle de 0 à 9V- temps de pose CCD à 1/250 ième de s- synchronisation de l'acquisition sur le top trame-forme du bord de plage visualiségrandissement réel.L'encoche sert à mesurer le23
Type de couplage Facteur degrandissementSNR bdp Eclairement nécessaire (nW/cm²) pourfaire une image à SNR bdp donnéOptique de relaisf15mm, f/8G = 1 21,11970122Optique de relaisf30mm, f/8G = 1 21,11950105Optique de relaisf30mm, f/4G = 1 21,1590370Optique de relaisf45mm, f/4G = 1 21,156039Optique de relaisType1, f/0,8G = 0,31 21,11286,3Optique de relaisType2, f/0,8G = 0,38 21,122017,2Tapernon collé surG = 0,44 21,1253,2l'écranTapercollé sur l'écranG = 0,44 21,117,672,46Fig. 24 : Efficacité du couplage pour différentes optiques et un taper de fibresCes mesures confirment que le couplage par taper reste la meilleure solution du point de vue del'efficacité photométrique, même si l'optique de relais ouverte à f/0,8 reste une alternativepossible, car elle est très lumineuse.4.3 L'optique d'imagerieL'optique d'imagerie a pour rôle de former sur la fenêtre d'entrée de l'intensificateur une imagelumineuse et de bonne qualité. Les tailles des fenêtres d'entrée sont généralement de 18 mm oude 25 mm de diamètre, ce qui implique l'utilisation d'une optique corrigée pour ces taillesd'images. C'est le cas des objectifs d'appareils photo corrigés pour des tailles d'images de 24 x 36mm (les objectifs de caméras CCD ne sont pas utilisables pour des tailles d'images aussigrandes). Dans le contexte qui est le notre deux choix sont possibles. Les optiques réfr<strong>active</strong>sclassiques, à condition que leur résistance à l'accélération soit étudiée ou les optiques réflectives(télescope) qui dans ce contexte auraient l'avantage d'un grand diamètre pour une résistancemécanique assurée.Dans le cas d'une fabrication d'optique "sur mesure" destinée à notre expérimentation, lacorrection du chromatisme n'a pas lieu d'être, puisqu'on travaille en éclairage monochromatique.Ceci laisse au concepteur une plus grande marge de manœuvre pour corriger les autresaberrations.24
4.3.1. Optique réfr<strong>active</strong>Dans cette catégorie le choix est vaste, puisque toutes les optiques d'appareil photo à focale fixesont utilisables, à condition que leur résistance à l'accélération soit avérée.Pour une focale donnée, les optiques sont plus difficiles à corriger pour une grande ouverture, lacomplexité de l'objectif augmente, et donc de plus en plus chères. A titre d'information, letableau figure 25 regroupe quelques exemples d'objectifs photographiques du marché.Fig. 25 : quelques exemples d'objectifs d'appareil photo (prix indicatifs)4.3.2. Optique réflectiveFabricant Focale (mm) Ouverture Prix (€)Nikon 800 1 : 5,6 7000Nikon 600 1 : 5,6 5150Pentax1 : 4 6650Nikon 500 1 : 8 12801 : 4 5100Nikon 400 1 : 5,6 22601 : 2,8 7400Nikon1 : 4 1400200 1 : 2 3750Canon1 : 1,8 5350Nikon 180 1 : 2,8 950Nikon 135 1 : 2,8 7001 : 2 1450Nikon 105 1 : 2,5 6601 : 1,8 1100Nikon1 : 1,8 56085 1 : 1,4 1450Canon1 : 1,2 27501 : 1,8 180Nikon 50 1 : 1,4 6201 : 1,2 760Canon1 : 1 3300Nikon 35 1 : 2 6601 : 1,4 1280Dans cette catégorie, le principe serait d'utiliser un télescope avec miroir primaire et miroirsecondaire sphériques ou asphériques en métal, les aberrations étant corrigées au niveau del'oculaire avec des groupes de lentilles dont le diamètre pourrait ne pas dépasser 25 mm. Lesoptiques "télescope" disponibles sur le marché ont généralement des grandes focales (>200mm)et sont corrigées pour des champs très fermés. Néanmoins, la fabrication d'un objectif réflectif de100 mm de focale avec 10° de champ de vision et ouvert à f/2 ne semble pas poser de problèmes25
si on utilise des surfaces asphériques et, pour l'oculaire, un groupe de lentilles de correction desaberrations.La figure 26 montre quelques unes des différentes possibilités de fabrication d'objectif réflectif.26Fig. 26 : a) Télescope de type Cassegrain, b) Gregorian, c) Schwarzschild4.4. Caractérisation de différent système d'imagerie4.4.1. Description des systèmes testésLes équations (e 3 ) et (e 4 ) permettent de calculer l'éclairement dans le plan image du systèmed'imagerie <strong>active</strong>. La sensibilité des caméras intensifiées va donc être déterminante pour le choix
des autres composants du système. Différents types (ou générations) de capteurs intensifiés, ainsique des caméras CCD non intensifiées ont été caractérisés en laboratoire. Ces caractérisationsont été effectuées du point de vue de la sensibilité des systèmes, de la résolution par la fonctionde transfert de modulation et du bruit.Une caméra intensifiée PROXITRONIC (figure 27) munie d'un intensificateur de génération 2 aété testée en laboratoire.Fig. 27 : Caméra PROXITRONICLa photocathode est de type S25 Enhanced, de diamètre 18mm et l'écran est de type P43. Lacaméra est équipée d'un capteur CCD SONY ICX024 AL.Le tableau de la figure 29 donne les caractéristiques d'autres systèmes intensifiés testé, présentéssur la figure 28. Il s'agit d'un intensificateur DEP de génération 4 (XD-4, type XX1700) et d'unCCD SONY ICX083AL.Fig. 28 : Caméra intensifiée et intensificateur de génération 427
Sensibilité des récepteurs intensifiés : Eclairement (nW/cm²) nécessaire pour faire une image avec un SNR bdp donné(temps de pose de 50 µs, acquisition en mode FRAME)Gain MCP%Gain Vidéo%100 10080 8060 60SNR bdp DICAM (nW/cm²) PROXI GEN2(nW/cm²) GEN4 (nW/cm²)λ=800 nm Lum. Bl. λ=800 nm Lum. Bl. λ=800 nm Lum. Bl.2 3,87 / / 8,3 5,51,1 0,328 / / 1,0 11 / / / 0,852 33,3 / 16,4 43 251,1 3,83 / 4,1 7,8 3,51 0,61 / / 62 487 / 112 283 1411,1 56,7 / 11,2 39 191 15,0 / 6,1 19Sensibilité des récepteurs intensifiés : Densité d'énergie (pJ/cm²) nécessaire pour faire une image avec un SNR bdp donné(acquisition en mode FRAME)Gain MCP%Gain Vidéo%100 10080 8060 60SNR bdp DICAM (pJ/cm²) PROXI (pJ/cm²) GEN4 (pJ/cm²)λ=800 nm Lum. Bl. λ=800 nm Lum. Bl. λ=800 nm Lum. Bl.2 0,19 0,41 0,271,1 0,02 0,05 0,051 0,042 1,6 0,8 2,15 1,251,1 0,19 0,2 0,39 0,171 0,03 0,32 24 5,6 14,15 7,051,1 2,8 0,56 1,95 0,951 0,75 0,3 0,95Fig. 29 : Mesure de la sensibilité des récepteurs intensifiés
Sensibilité des caméras CCD : Densité d'énergie (pJ/cm²) (= Eclairement * Temps de pose)nécessaire pour faire une image avec un SNR bdp donné(acquisition en mode FRAME, FIELD ou MONOSHOT, CAG OFF, γ OFF)GainVidéo%1008060XC – ST 70(pJ/cm²)Micam HRS(pJ/cm²)VS 500(pJ/cm²)Micam X(pJ/cm²)ITRAS(pJ/cm²)λ=800 Lum. Bl. λ=800 Lum. Bl. λ=800 nm Lum. Bl. λ=800 nm Lum. Bl. λ=800 nm Lum. Bl.nmnm2 475 132 921 175 4151,1 59 18 66 23 261 152 505 1353941,1 67 181061 232 512 1821,1 67 261 301476263 / 6323 / 15Fig. 30 : Mesure de la sensibilité des caméras CCDSensibilité des caméras CCD : Caractéristiques fournies par le constructeurXC – ST 70 Micam HRS VS 500 Micam X ITRAS0,3 lux1 lux0,136 lux0,41 lux@ F1.4@ F1.4@ F1.4@ F1.40,3 lux @F1.4,AGCON1 lux @F1.4,AGCON0,1 lux @F1.2,AGCON0,3 lux @F 1.2,AGCONFig. 31 : Comparaison des valeurs de sensibilité fournies par le constructeur0,6 lux @F1.4,AGCON0,6 lux@ F1.429
Il faut noter que :- Ces mesures sont, en moyenne, entachées d'une incertitude pouvant être de +/- 30%.- Pour les valeurs de sensibilité, on ne peut comparer les systèmes entre eux qu'en utilisantles densités d'énergie nécessaires à faire une image, les éclairements sont donnés parcequ'ils correspondent à un temps de pose connu.- Les valeurs en Lux données par le constructeur n'ont pas de réelle signification à 800nm.Pour les systèmes intensifiés, on remarque que la caméra PROXITRONIC est plus sensible quele GEN4.Pour les caméras CCD, on retrouve globalement les données constructeurs. Les différencesproviennent du fait que les caractérisations ne sont pas faites aux mêmes longueurs d'onde quecelles effectuées par le constructeur.Ces valeurs de sensibilité minimum nous permettrons de dimensionner le reste des éléments dusystème : diamètre de l'optique, champ de vision/angle d'ouverture de l'éclairage.L'utilisateur de systèmes intensifiés se rend rapidement compte de la dégradation de la qualité del'image lorsque le gain en luminance augmente. Cette qualité dépend d'une part de la résolutiondu système, d'autre part du bruit, paramètres qu'il est nécessaire de mesurer expérimentalement.4.4.3. FTM expérimentaleLa fonction de transfert de modulation permet de rendre compte de la capacité d'un systèmed'imagerie a donner une image contrastée d'un détail de l'image. Les FTM ont été relevées enlaboratoire par la méthode de la fonction de transfert de contraste (CTF) en utilisant des mires defréquences spatiales de plus en plus petites. L'optique utilisée pour imager les mires sur lacaméra intensifiée a été choisi pour sa très haute qualité, de façon à ce que sa FTM n'interviennepas dans la mesure. Les caméras CCD associées aux intensificateurs sont toutes de hauterésolution (pixels très petits), ce qui veut dire que la FTM mesurée est en fait celle del'intensificateur seul.L'étude s'est portée sur la variation de la FTM avec le gain de l'intensificateur et avec le tempsd'ouverture de l'obturateur électronique (temps de pose).4.4.3.1. FTM en fonction du gain de l'intensificateurPour réaliser cette étude indépendamment de l'augmentation du bruit en fonction du gain, lescontrastes sont relevés sur un oscilloscope munie de la fonction "vidéo scan" et permettant den'afficher qu'une certaine ligne du signal vidéo. En outre, une moyenne sur 64 acquisitions estréalisée.La figure 32 montre les FTM du système PROXITRONIC relevé pour différents gains del'intensificateur, soit 40%, 60%, 80%.
1Mesure de la FTM : étude en fonction du gainPROXITRONIC50 µsPentax 200 mmDiaphragme 220,80,60,440 %60%80 %0,200 5 10 15 20 25 30 35pl/mmCCDFig. 32 : FTM de la caméra PROXITRONIC pour différents gains
4.4.4. Bruit du systèmeLorsqu'on réalise une image avec un système intensifié, chaque point de l'image est entaché d'unbruit. Ce bruit est facilement quantifiable en faisant l'image d'un réflecteur lambertien parfait ethomogène éclairé à différents niveaux. On relève la moyenne des intensités des pixels de l'imageet l'écart de niveau de chaque pixel par rapport à cette moyenne donne l'écart-type, grandeurcaractéristique du bruit. Soit X i,j , le niveau de gris du pixel (i,j), on calcule la moyenne X et22l'écart type σ (où σ est la variance) par les relations suivantes.NNXNN∑∑Xi,jj i=2etN2=∑∑( X − X )Ces mesures sont réalisées sur un grand nombre de pixels (N) et sur un grand nombre d'imagessuccessives (typiquement 100), pour augmenter la fiabilité des résultats.σNjNiN2i,j− 12
Ecart-type50Ecart-type en fonction du niveau de gris à différents gainsCaméra PROXITRONICPentax 200 mm, diaph. 16temps d'ouverture : 50 µs403020gain40%60%80%95%1000 50 100 150 200 250Niveauxde grisFig. 33 : Ecart-type du bruit en fonction des niveaux de gris pour différents gains (caméra PROXITRONIC)33
La figure 33 montre que l'on retrouve l'allure générale prévue par la théorie. On constate quele bruit est une fonction croissante de l'éclairement sur la photocathode. La baisse constatéepour les valeurs élevées des niveaux de gris n'a pas de signification physique et provient de lasaturation de l'image quand l'addition "niveau moyen + bruit" dépasse 255. Le bruit estfonction du gain et limite très rapidement la qualité de l'image.Ce bruit a un comportement essentiellement aléatoire. Dans les applications où il est possiblede superposer plusieurs impulsions lumineuses dans la même trame vidéo, il est moyenné etdonc fortement atténué. Cette technique ne peut malheureusement pas être employée dansnotre application puisqu' à une impulsion laser correspond une seule image.5. Conception d'un système d'imagerie <strong>active</strong> pour la vision de nuitOn se propose de concevoir un système permettant d'observer une scène située à une distancede 1000m à partir d'une plate forme aéroportée (drone).Remarque : Pour éviter le flou de bouger dans l'image dû au vecteur mobile, le tempsd'intégration pour enregistrer une image doit être limité à 50µs.On donne :• Longueur d'onde de travail : 800nn• Albedo ou coefficient de réflexion de la cible : 0,3• Coefficient d'absorption de l'atmosphère α 800nm = 0.196 km -1• Pupille de l'optique de réception limitée par l'encombrement du système : φ = 50 mm• La transmission de l'optique dans le proche IR : τ opt = 0,8• Le système intensifié récepteur est constitué de la caméra PROXOTRONIC munied'un intensificateur de diamètre 18 mmEnoncé : Déterminer la puissance laser d'éclairage P et la focale de l'optique f nécessairepour identifier un véhicule à une distance de 1000m et ceci avec une qualité d'imagesatisfaisante.A. Puissance du laser d'éclairage :La figure 33 montre que le bruit de la caméra PROXITRONIC devient prohibitif lorsqu'ondépasse un gain de 60% (effet de neige). On admet que le gain vidéo du CCD est égalementfixé à 60 %. Le tableau de la figure 29 montre que l'éclairement dans le plan image doit êtrede pour sortie du bruit (SNR bdp = 1)A partir de l'équation (e 3 ) on détermine la puissance laser d'éclairage nécessaire :1
AN : P ≥ 153 WL'application numérique donne une puissance laser crête supérieure ou égale àdurée de 50µs, l'énergie par impulsion doit donc être supérieure :sur uneCette valeur est tout à fait compatible avec la puissance des matrices de diodes laser actuelle,la difficulté d'utilisation des matrices de diodes réside dans le traitement du faisceauasymétrique et inhomogène en sortie de matrice. Cependant plusieurs techniques decollimation existent permettant d'obtenir un faisceau symétrique, homogène particulièrementbien adapté à l'éclairage de scène.Remarquons que nous venons de déterminer la puissance laser sans avoir pris enconsidération le champ de vue (FOV) ni la divergence du laser. Ces grandeurs n'interviennentpas dans le dimensionnement de la source d'éclairage ce qui va à l'encontre de l'intuition. Enimagerie <strong>active</strong> (source d'éclairage artificielle), si l'optique de réception est adaptée à ladivergence du laser, l'éclairement dans le plan image reste constant quelque soit le champ devue.En est-il de même avec la distance ?et en imagerie passive ?B. Focale de l’objectif d’imagerieNous venons de voir que le champ de vue n’influe pas sur la puissance d’éclairement enimagerie <strong>active</strong> (et pour autant que la divergence du laser et le champ de vue de l'optiquecoïncident) . Celle-ci est fixée à une valeur de 500 W en 50 µs pour toute la suite duproblème. Pour des missions d’observation, l’intérêt est d’observer avec le champ de vue(FOV) le plus large possible. Un grand angle correspond à une courte focale, plus celle-ciaugmente, plus le champ de vue diminue.Le paramètre qui va limiter la valeur du champ de vue est la résolution du système. Rappelonsque le but est l’identification d’un véhicule à une distance de 1000m.Pour une dimension de véhicule de 6,4 m, le système doit avoir la résolution suivante pourpermettre son identification :2
Un logiciel d’aide à la conception de systèmes d’imagerie <strong>active</strong> sous MATLAB permet derésoudre les équations (e 5 à e 18 ) en fonction des paramètres d’entrée tels que :• Source• Atmosphère• Scène• Optique• CCD• Dispositif caméra ou intensificateur• Affichage• Graphiques FTMAprès la saisie de ces valeurs, on obtient la FTM globale du système selon l’équation (e 8 )ainsi que les FTM de chacun des sous-ensembles.En résolvant l’équation (e 19 ), on obtient la valeur de SNR permettant de déterminer si lesystème est en mesure de remplir le cahier des charges c’est à dire :5.1 Cas d’un champ de vue de 20°A quelle valeur de focale ce champ de vue correspond il ?3
Fenêtre de donnéesFTM globale et FTM des composants4
SNR du système globalCe cas de figure convient-il pour notre cahier des charges ?Pourquoi ?5.2 Cas d’un champ de vue de 10°Fenêtre de données5
FTM du système et des composantesSNR du systèmeCe cas de figure convient-il pour notre cahier des charges ?Pourquoi ?6
5.3 Cas d’un champ de vue de 5°Fenêtre de donnéesFTM du système et des composantes7
SNR du systèmeCe cas de figure convient-il pour notre cahier des charges ?Pourquoi ?Quel cas de figure choisira-t-on ?Pourquoi ?5.5 ExpérimentationsPlusieurs campagnes d’acquisition d’images expérimentales de nuit ont été menées dans lebut de valider le code de simulation. Deux prototypes expérimentaux ont été réalisés l’un avecun champ de vue de 5° et l’autre de 10°.8
5.5.1 Champ de vue de 5°On a placé dans la scène un certain nombre d’objets de distance différentes5.5.2 Champ de vue de 10°Dans ce cas de figure on voit sur l’image que les véhicules placés à 500 et 800 m sontdétectable, la mire placée à 1000m et qui contient une fréquence spatiale de 1 lp/mrd « sort »tout juste du bruit conformément aux résultats donnés par la simulation.9




