Sistema sensorimotorio 1 - CPRG
Sistema sensorimotorio 1 - CPRG
Sistema sensorimotorio 1 - CPRG

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
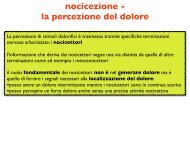
Il sistema <strong>sensorimotorio</strong>
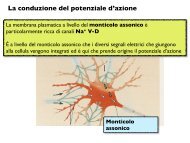
Perché interessa agli psicologi<br />
1 Info visiva per<br />
localizzare il bersaglio<br />
8 Corteccia sensoriale riceve l’info<br />
che la tazza è stata presa<br />
2 Aree motorie frontali<br />
pianificano il mov.<br />
3 Midollo spinale invia info alla mano<br />
7 Gangli della base giudicano la forza<br />
Cervelletto corregge eventuali errori<br />
4 Motoneuroni inviano messaggi<br />
ai muscoli della mano<br />
6 Midollo spinale invia info<br />
sensoriali al cervello<br />
Neuroni<br />
motori<br />
5 Recettori sensoriali sulle dita informano<br />
la corteccia della presa del bersaglio<br />
Neuroni<br />
sensoriali
Selezione per l’azione<br />
• Il caos comportamentale: troppi stimoli per<br />
troppe (potenziali) azioni: il vaso di frutta<br />
• Assegnare ad uno specifico sottoinsieme di tutte<br />
le informazioni disponibili e potenzialmente<br />
rilevanti il controllo del sistema effettore,<br />
escludendo da tale controllo tutte le altre<br />
• Es. effetto dei distrattori sull’output motorio
Movimento e Controllo Motorio<br />
• Movimento: modificazione della posizione<br />
del corpo o di alcune sue parti nello spazio<br />
• Controllo motorio: l'insieme delle funzioni<br />
fisiologiche e psicologiche che la mente e il<br />
corpo svolgono per governare la postura e il<br />
movimento
I tre principi del sistema<br />
<strong>sensorimotorio</strong><br />
• Il sistema <strong>sensorimotorio</strong> e’ organizzato in<br />
modo gerarchico<br />
• L’output motorio e’ guidato dall’input<br />
sensoriale<br />
• L’apprendimento modifica la natura e il<br />
“locus” del controllo <strong>sensorimotorio</strong>
Organizzazione di tipo gerarchico<br />
• Gli ordini vengono impartiti al livello piu’ alto<br />
della gerarchia e poi diramati ai livelli piu’ bassi<br />
• Sistemi gerarchici che operano in parallelo<br />
• Segregazione funzionale<br />
– Ognuno dei livelli gerarchici tende ad essere costituito<br />
da diverse unita’ che svolgono funzioni diverse
L’output motorio e’ guidato<br />
dall’input sensoriale<br />
• Monitoraggio dell’esecuzione delle risposte<br />
• Feedback sensoriale<br />
– Una eccezione: movimenti balistici
Il caso G.O.<br />
(Rothwell e colleghi, 1982)<br />
• Lesione selettiva dei nervi somatosensoriali delle<br />
braccia<br />
– Difficolta’ nell’eseguire azioni articolate come<br />
• Abbottonarsi<br />
• Raccogliere monete<br />
• Nessuna reazione all’urto<br />
• Impossibilita’ di mantenere un livello costante di<br />
contrazione muscolare<br />
– Una strategia: controllo visivo continuo
L’apprendimento <strong>sensorimotorio</strong><br />
• Stadi iniziali: controllo consapevole (ballare,<br />
suonare il pianoforte, nuotare ecc.)<br />
• Dopo molta pratica: non vi e’ alcuna necessita’ di<br />
un controllo consapevole<br />
• La maggior parte dell’apprendimento<br />
<strong>sensorimotorio</strong> e’ caratterizzato<br />
dall’organizzazione di singole risposte in sequenze<br />
continue di programmi motori e dal trasferimento<br />
di questi ultimi ai livelli inferiori del sistema<br />
nervoso
Un modello generale del<br />
funzionamento del sistema SM
Programma motorio<br />
• Henry and Rogers (1960)<br />
• Keele (1968)<br />
• Adams (1971)
Programma motorio<br />
• Collezione temporalmente strutturata di<br />
parametri che, quando trasmessi<br />
direttamente al sistema motorio, possono<br />
iniziare e condurre a termine un’azione<br />
specifica
Programmi motori generalizzati<br />
• ….una collezione di istruzioni generalizzate<br />
che rappresentano non una, ma una classe di<br />
movimenti collegati
Programmi motori generalizzati<br />
• Bernstein (1967)<br />
• Schmidt (1975)
Programmi motori generalizzati<br />
• Una volta stabilito il programma generale<br />
per un movimento specifico, puo` essere<br />
utilizzato per controllare l’esecuzione di<br />
quel movmento da parte di diversi effettori
Programmi motori generalizzati<br />
• Una rappresentazione che non contiene<br />
informazioni specifiche su muscoli e<br />
articolazioni
Indipendenza dell’effettore<br />
• A quale livello e` possibile separare la<br />
rappresentazione dell’azione dai singoli<br />
effettori
Indipendenza dell’effettore<br />
• Raibert (1977)<br />
• Compito: scrivere la seguente frase“Able was I ere<br />
I saw Elba” con:<br />
– La mano dominante<br />
– Il braccio dominante con il polso immobilizzato<br />
– La mano non dominante<br />
– La testa con la penna tenuta fra i denti<br />
– La gamba con la penna fissata al piede
Indipendenza dell’effettore<br />
Raibert, 1977
Indipendenza dell’effettore<br />
• Paziente con arto mioelettrico<br />
– Il soggetto indossava un braccio mioelettrico<br />
• Mano dominante<br />
• Mano non dominante<br />
• Bimanuale<br />
• Gomito
Indipendenza dell’effettore
Indipendenza dell’effettore<br />
• Uno studio sulla prensione<br />
– Afferrare con la bocca<br />
– Afferrare con la mano
Indipendenza dell’effettore<br />
Prensione con la bocca<br />
Prensione manuale
Dove sono immagazzinate nel cervello<br />
le strutture per la pianificazione<br />
motoria<br />
• Tecniche di neuroimmagine possono essere<br />
utilizzate per investigare se la prensione<br />
eseguita con effettori diversi viene servita<br />
da strutture per la pianificazione comuni.
Set-up sperimentale<br />
Punto di fissazione<br />
30 cm<br />
sostegno
Risultato principale<br />
Coronal views of bilateral rCBF<br />
activations in the inferior parietal lobule<br />
for the three tasks<br />
(a) Mouth Grasp - View<br />
(b) Finger Grasp - View<br />
(c) Imagine Mouth<br />
Grasp - View
Conclusione<br />
• Codifica parietale per le rappresentazioni<br />
dei programmi motori sono indipendenti dai<br />
singoli effettori
La corteccia motoria associativa<br />
• La corteccia associativa parietale posteriore<br />
• La corteccia associativa prefrontale<br />
dorsolaterale
La corteccia associativa parietale<br />
posteriore<br />
• Integra la posizione di<br />
partenza delle parti del corpo<br />
che devono essere mosse con<br />
la posizione di tutti gli<br />
oggetti esterni coi quali il<br />
corpo sta per interagire<br />
• Informazioni da:<br />
– <strong>Sistema</strong> visivo<br />
– <strong>Sistema</strong> uditivo<br />
– <strong>Sistema</strong> somatosensoriale
La corteccia associativa parietale<br />
posteriore<br />
Informazioni a:<br />
– Corteccia associativa<br />
prefrontale dorsolaterale<br />
– Corteccia motoria<br />
secondaria<br />
– Campi oculari frontali
La corteccia associativa<br />
prefrontale dorsolaterale<br />
• Riceve proiezioni da<br />
– Corteccia parietale<br />
posteriore<br />
• Proietta alle aree della<br />
– corteccia motoria secondaria<br />
– campo oculare frontale<br />
• Rappresentazione mentale<br />
degli stimoli ai quali il<br />
soggetto sta per rispondere
La corteccia motoria secondaria<br />
• L’area motoria<br />
supplementare<br />
• La corteccia<br />
premotoria<br />
Insert 7.5<br />
• Sono aree<br />
somatotopiche<br />
(organizzate in<br />
accordo alla<br />
mappa corporea)
L’area motoria supplementare:<br />
Esecuzione e Programmazione<br />
Esecuzione<br />
Programmazione
La corteccia premotoria:<br />
Neuroni Specchio
Corteccia premotoria: Substrati neurali<br />
sottostanti l’osservazione del movimento<br />
• Buccino et al. (2001)<br />
• Compiti:<br />
• L’osservazione di una bocca che afferra vs<br />
l’osservazione di una bocca immobile<br />
• L’osservazione di una mano che afferra vs<br />
l’osservazione di una mano ferma<br />
• L’osservazione di un piede che preme vs<br />
l’osservazione di un piede fermo
Substrati neurali sottostanti<br />
l’osservazione del movimento<br />
OSSERVAZIONE DI:<br />
MOVIMENTI DELLE BOCCA<br />
MOVIMENTI DELLA MANO<br />
MOVIMENTI DEL PIEDE<br />
Buccino et al. 2001
La corteccia motoria primaria:<br />
homunculus motorio
L’omuncolo motorio<br />
La corteccia motoria primaria<br />
(M1) e’ localizzata nel giro<br />
precentrale<br />
Insert 7.7<br />
Costituisce il principale punto<br />
di partenza corticale da cui<br />
originano i segnali<br />
sensorimotori<br />
La stimolazione elettrica di M1<br />
evoca la comparsa di<br />
movimenti controlaterali
Somatotopia delle dita<br />
• Indovina & Sanes (2002)<br />
• Compito<br />
– Flessione ed estensione delle<br />
dita 1, 2, o 3 della mano<br />
destra.<br />
• Risultati<br />
– Sovraposizioni in M1c,<br />
SMAc and SMAi<br />
• D1 + D3 = viola/rosa<br />
• D1 + D2 = Blu chiaro<br />
• D2 + D3 = Giallo
Substrati neurali delle immagini<br />
motorie mentali<br />
• L’immaginazione di azioni motorie<br />
semplici o complesse non accompagnato da<br />
movimenti del corpo evidenti
Substrati neurali delle immagini<br />
motorie mentali<br />
• Porro et al., (1996)<br />
• Compiti:<br />
– Immaginare un paesaggio familiare<br />
– Immaginare l’opposizione ritmica di indice e pollice<br />
della mano destra<br />
– Esecuzione dell`azione precedentemente immaginata
Substrati neurali delle immagini<br />
motorie mentali<br />
• Porro et al., (1996)<br />
– Durante i compiti di immaginazione motoria<br />
l’aumento percentuale nell’intensita` del segnale<br />
nell’area M1 era il 30% di quello visto durante il<br />
compito di esecuzione motoria.
Substrati neurali delle immagini<br />
motorie mentali<br />
Porro et al., 2000
Strutture motorie sottocorticali<br />
Gangli della base<br />
• Input da corteccia<br />
• Output a corteccia frontale<br />
via talamo<br />
• Funzione: stimolare l’inizio<br />
ed il mantenimento di<br />
movimenti finalizzati; inibire<br />
quelli indesiderati<br />
Cervelletto<br />
• Input dal midollo e corteccia<br />
• Output al midollo<br />
• Funzione: mantenimento<br />
postura ed equilibrio; mov.<br />
veloci; apprendimento;<br />
correzione errori
Strutture motorie sottocorticali<br />
Gangli della base<br />
• Input da corteccia<br />
• Output a corteccia frontale<br />
via talamo<br />
• Funzione: stimolare l’inizio<br />
ed il mantenimento di<br />
movimenti finalizzati; inibire<br />
quelli indesiderati<br />
Cervelletto<br />
• Input dal midollo e corteccia<br />
• Output al midollo<br />
• Funzione: mantenimento<br />
postura ed equilibrio; mov.<br />
veloci; apprendimento;<br />
correzione errori
Gangli della base e cervelletto<br />
• Gangli della base e<br />
cervelletto<br />
– Interagiscono con i<br />
diversi livelli della<br />
gerarchia<br />
sensorimotoria<br />
– Ne coordinano e ne<br />
modulano l’attivita’
Disturbi del movimento:<br />
gangli della base<br />
• Interruzione del delicato equilibrio fra<br />
stabilita` posturale e movimento.
James Parkinson (1755-1828)
Morbo di Parkinson<br />
• Malattia degenerativa a causa ignota<br />
• Degenerazione delle cellule dopaminergiche<br />
della sostanza nera compatta
Sostanza nera compatta
Degenerazione della sostanza<br />
nera compatta
Morbo di Parkinson: incidenza
Morbo di Parkinson: eziologia<br />
• Fattori Ereditari: ipotizzata un’ereditarietà<br />
poligenica (casi familiari)<br />
• Fattori ambientali: vita in ambiente rurale (acqua<br />
di pozzo), esposizione a tossici (MPTP,<br />
Manganese, CO)<br />
• Fattori virali: vedi encefalite letargica postinfluenzale<br />
del 1916
Morbo di Parkinson: diagnosi<br />
• Esame del malato<br />
• Scale di gravità clinica<br />
– UPDRS III<br />
– Hoehn e Yahr
Morbo di Parkinson: strategie<br />
terapeutiche<br />
• Terapia farmacologica: precursori della<br />
dopamina (L-Dopa + inibitore) e farmaci<br />
dopaminergici<br />
• Terapia sostitutiva: trapianti<br />
• Terapia demolitiva: chirurgia<br />
• Elettrostimolazione<br />
• Terapia riabilitativa
Morbo di Parkinson:<br />
disturbi principali<br />
• Motori<br />
• Neuropsicologici<br />
• Psichici<br />
• Vegetativi
Morbo di Parkinson:<br />
disturbi vegetativi<br />
• Alterazioni della minzione (37-71%)<br />
• Alterazioni della termoregolazione (eccesso di tolleranza<br />
al freddo)<br />
• Ipotensione ortostatica (nel 10% dei casi).<br />
• Scialorrea (ipersalivazione)<br />
• Seborrea<br />
• Stitichezza<br />
• Alterazioni della conduzione cardiaca<br />
• Impotenza
Morbo di Parkinson:<br />
alterazioni neuropsicologiche<br />
• Alterazioni visuospaziali<br />
• Deterioramento intellettivo<br />
• Bradifrenia (rallentamento del<br />
pensiero)<br />
• Anomia tipo “punta della lingua"<br />
• Dismnesia (memoria)
• Apatia<br />
Morbo di Parkinson:<br />
alterazioni psichiche<br />
• Depressione<br />
• Labilità emotiva<br />
• Riduzione dell'interesse<br />
sociale<br />
• Disturbi del sonno
Morbo di Parkinson:<br />
disturbi motori<br />
• Tremore a riposo<br />
• Rigidità<br />
• Bradicinesia<br />
• Ipomimia<br />
• Cinesia paradossa<br />
• Acinesia
Morbo di Parkinson:<br />
altri disturbi motori<br />
• Discinesie<br />
–Distonia<br />
–Corea
Valutazione delle disfunzioni<br />
motorie<br />
• Scale di gravità clinica<br />
– Scala motoria del Parkinson: UPDRS III<br />
– Hoehn e Yahr<br />
Stadio I Stadio II Stadio III Stadio IV Stadio V
Passaggio da uno schema<br />
motorio all’altro
Passaggio da uno schema<br />
motorio all’altro
Esecuzione di movimenti<br />
simultanei<br />
• Tirare fuori il portafogli dalla tasca<br />
mentre si cammina.
Morbo di Parkinson
MP e prensione<br />
Trasporto<br />
Manipolazione<br />
Due oggetti di diverse dimensioni e posti a tre distanze diverse
velocità (mm/s)<br />
Apertura (mm)<br />
Prensione nel MP<br />
600<br />
Controlli<br />
50<br />
Apertura presa<br />
Velocità<br />
0<br />
800<br />
Parkinsoniani<br />
0<br />
50<br />
0<br />
0<br />
Delay<br />
Tempo (ms)<br />
0 1000
MP: Effetti della terapia farmacologica
Le vie motorie discendenti<br />
• Quattro vie differenti<br />
– Vie motorie dorsolaterali: decorrono lungo la<br />
porzione dorsolaterale del midollo spinale<br />
• Cellule di Betz<br />
– Vie motorie ventromediali: discendono lungo la<br />
regione ventro-mediale del midollo spinale
Le vie motorie discendenti<br />
dorsolaterali<br />
Inserire 7.9
Le vie motorie discendenti<br />
dorsolaterali<br />
Inserire 7.9
Le vie motorie discendenti<br />
ventromediali
Tronco dell’encefalo<br />
• Tetto<br />
– Riceve informazionali spaziali<br />
visive e uditive<br />
• Nucleo vestibolare<br />
– Riceve informazioni relative<br />
all’equilibrio da alcuni recettori<br />
dell’orecchio<br />
• Formazione reticolare<br />
– Contiene programmi motori per<br />
movimenti complessi<br />
(camminare, nuotare, saltare)<br />
• Nuclei motori dei nervi<br />
cranici<br />
– Controllano i muscoli della<br />
faccia
Le vie dorsolaterali e<br />
ventromediali a confronto<br />
Somiglianze morfologiche<br />
Entrambe composte da due tratti principali:<br />
1. In un fascio gli assoni provenienti dalla corteccia<br />
terminano nel midollo spinale<br />
2. In un fascio gli assoni provenienti dalla corteccia<br />
fanno sinapsi nel tronco encefalico, da cui<br />
proiettano nel midollo spinale
Le vie dorsolaterali e<br />
ventromediali a confronto<br />
Differenze morfologiche<br />
1. I due tratti ventromediali sono piu` diffusi<br />
2. I tratti ventromediali proiettano su motoneuroni<br />
che innervano muscoli prossimali del tronco e<br />
degli arti (es. spalle), i tratti dorsolaterali<br />
proiettano su motoneuroni che innervano muscoli<br />
distali (es. dita)
Le vie dorsolaterali e<br />
ventromediali a confronto<br />
Somiglianze funzionali<br />
•I quattro tratti motori originano dalla<br />
corteccia motoria ed innervano motoneuroni<br />
•La loro funzione presunta e` quella di<br />
controllo del movimento volontario
Le vie dorsolaterali e<br />
ventromediali a confronto<br />
Differenze funzionali<br />
• Lawrence e Kuypers, 1968a<br />
Resezione dei tratti corticospinali dorsolaterali<br />
• Lawrence e Kuypers, 1968b<br />
Ulteriore resezione (1 oppure 2)<br />
1. Tratto corticorubrospinale dorsolaterale<br />
2. Tratti ventromediali
Lawrence e Kuypers, 1968a<br />
Resezione dei tratti corticospinali dorsolaterali<br />
• Capacita` mantenute<br />
stare in piedi, camminare, arrampicarsi<br />
• Capacita` perdute<br />
difficolta` nel raggiungimento, incapacita`<br />
di muovere le dita in modo indipendente e<br />
di aprire le dita per lasciar cadere un<br />
oggetto
Lawrence e Kuypers, 1968b<br />
1) Resezione anche del tratto corticorubrospinale<br />
dorsolaterale<br />
• Capacita` mantenute<br />
stare in piedi, camminare, arrampicarsi<br />
• Capacita` perdute<br />
in posizione seduta: braccia floscie,<br />
durante i movimenti di raggiungimento le<br />
dita sono usate a rastrello
Lawrence e Kuypers, 1968b<br />
2) Resezione anche dei tratti ventromediali<br />
Capacita` perdute<br />
• gravi anomalie posturali: incapacita` di<br />
camminare e rimanere seduti<br />
• Perdita del controllo delle spalle:<br />
alimentazione con movimenti del gomito e<br />
a mano intera
Vie dorsolaterali e ventromediali:<br />
differenze funzionali<br />
(Lawrence e Kuypers, 1968 a,b)<br />
Differenze funzionali<br />
• I tratti ventromediali<br />
hanno la funzione di controllare la postura e dei<br />
movimenti del corpo intero<br />
• I tratti dorsolaterali<br />
(cortico-spinale e cortico-rubro-spinale)<br />
controllano i movimenti di raggiungimento degli<br />
arti
I circuiti sensorimotori spinali:<br />
i muscoli<br />
• Unita’ motrici<br />
• Sono costituite da un solo motoneurone e da tutte le<br />
fibre dei muscoli scheletrici che sono innervate da<br />
questo<br />
• Placca motrice<br />
• Attivata dall’acetilcolina<br />
– Provoca la contrazione della fibra<br />
• Pool motorio<br />
• L’insieme dei motoneuroni che innervano le fibre di<br />
un singolo muscolo
I muscoli<br />
Insert 7.11
I muscoli<br />
• Muscoli lisci<br />
• Regolati dal sistema nervoso autonomo<br />
• Muscoli striati<br />
• Sono sotto il controllo volontario
I muscoli<br />
– Sono composti da fibre elastiche in grado di<br />
modificare lunghezza e tensione<br />
• Fibre muscolari rapide (ad esempio, quelli della<br />
gamba)<br />
– Si contraggono e si rilasciano velocemente<br />
– Generano una forza notevole<br />
– Si affaticano velocemente<br />
» Sono caratterizzate da una bassa vascolarizzazione
I muscoli<br />
– Sono composti da fibre elastiche in grado<br />
di modificare lunghezza e tensione<br />
• Fibre muscolari lente (postura)<br />
– Si contraggono e si rilasciano lentamente<br />
– Sono deboli<br />
– Si contraggono piu’ a lungo<br />
» Sono molto vascolarizzate
I muscoli<br />
– Flessori<br />
• Per piegare o flettere un’articolazione<br />
– Estensori<br />
• Per raddrizzare o estendere un articolazione
I muscoli<br />
I muscoli sono organizzati a coppie agonista/antagonista quando<br />
l’agonista si contrae, l’antagonista deve rilassarsi
Gli organi recettoriali dei tendini<br />
e dei muscoli<br />
• Recettori che controllano l’attivita` dei<br />
muscoli scheletrici:<br />
1. Organi tendinei del Golgi<br />
2. Fusi neuromuscolari
Gli organi tendinei del Golgi<br />
• Si trovano all’interno dei tendini<br />
• Rispondono all’aumento di tensione del<br />
muscolo (cioe` alla trazione del muscolo<br />
sul tendine)<br />
• Funzioni:<br />
1. Informativa<br />
2. Protettiva
I fusi neuromuscolari<br />
• Si trovano all’interno del tessuto muscolare<br />
• Rispondono alle variazioni di lunghezza del<br />
muscolo<br />
• Funzioni:<br />
1. Circuito di feedback del fuso neuromuscolare<br />
2. Riflesso di stiramento<br />
3. Riflesso di ritrazione
Il circuito di feedback del fuso<br />
neuromuscolare<br />
• Ciascun fuso ha il proprio<br />
1. Muscolo intrafusale<br />
2. Motoneurone intrafusale<br />
• Funzione: mantenere il fuso sensibile alle<br />
piccole variazioni di stiramento del<br />
muscolo extrafusale
Il circuito di feedback del fuso neuromuscolare<br />
Insert 7.14
Il riflesso di stiramento<br />
• Riflesso evocato da una forza esterna improvvisa che<br />
stira un muscolo<br />
• Il circuito di feedback del fuso produce una<br />
contrazione compensatoria del muscolo che<br />
controbilancia la forza esterna<br />
• Funzione: evitare che forze esterne alterino la<br />
posizione desiderata del corpo
Il riflesso di stiramento<br />
Insert 7.16
Il riflesso di stiramento
Due principi funzionali del<br />
sistema <strong>sensorimotorio</strong><br />
• Il ruolo importante svolto dal feedback<br />
sensoriale nella regolazione dell’output<br />
motorio<br />
• La capacita’ dei circuiti inferiori della<br />
gerarchia motoria di assolvere compiti<br />
‘minori’ senza richiedere l’intervento dei<br />
livelli superiori
Il riflesso di ritrazione<br />
• Risposta riflessa<br />
a stimoli<br />
dolorosi<br />
• Funzione<br />
protettiva
Importanza del feedback<br />
sensoriale<br />
Il successo di una azione dipende largamente<br />
dalla corrispondenza tra il movimento desiderato<br />
e l’output motorio prodotto<br />
•Controllo motorio a circuito aperto<br />
•Controllo motorio a circuito chiuso
Controllo motorio a circuito chiuso<br />
scopo dell'azione<br />
aggiornamento della<br />
traccia mnestica<br />
recupero della<br />
traccia mnestica<br />
esecuzione della<br />
prima parte del<br />
movimento<br />
• Importante per<br />
aggiornare il<br />
sistema<br />
rilevamento delle<br />
informazioni sensoriali<br />
confronto con la<br />
traccia percettiva<br />
registrazione delle<br />
conseguenze sensoriali<br />
nella traccia percettiva<br />
si no correzione della parte<br />
corrispondono<br />
di movimento eseguita
Controllo motorio a circuito chiuso<br />
• Utilizzo feedback durante l’esecuzione<br />
• Requisiti necessari al sistema di controllo a<br />
circuito chiuso:<br />
a) un sistema periferico in grado di rilevare le informazioni<br />
sensoriali relative all'esecuzione del movimento e di<br />
trasmetterle al sistema centrale<br />
b) una rappresentazione interna del movimento con la quale<br />
confrontare i feedback periferici<br />
c) un meccanismo in grado di eseguire il confronto tra<br />
informazioni sensoriali e rappresentazione interna e che, in<br />
caso di mancata corrispondenza, metta in atto le correzioni<br />
necessarie
Critiche al controllo motorio a circuito<br />
chiuso<br />
• Tempo necessario ad implementare correzioni<br />
ragionevole solo per movimenti lenti<br />
• Problema dell’immagazzinamento: le rappresentazioni<br />
relative a tutti gli specifici movimenti che l'organismo è<br />
in grado di compiere dovrebbero essere immagazzinate<br />
in memoria<br />
• Problema della novità: come è possibile eseguire una<br />
nuova azione, un'azione cioe' per la quale non esiste<br />
alcuna traccia mnestica
Critiche al controllo motorio a<br />
circuito chiuso<br />
• Cosa succede quando i circuiti periferici sono<br />
disconnessi dalla corteccia motoria<br />
Studi su animali<br />
Studi su pazienti
Critiche al controllo motorio a<br />
circuito chiuso<br />
• Anche in assenza di informazioni sensoriali<br />
provenienti dall'arto che sta eseguendo il<br />
movimento, i soggetti sono in grado di<br />
esibire comportamenti motori quasi normali<br />
• Il feedback proveniente dall'arto coinvolto<br />
nell'azione non è indispensabile per il<br />
controllo del movimento
Controllo motorio a circuito aperto<br />
Scopo dell’azione<br />
Generazione<br />
comando motorio<br />
Parametri<br />
movimento<br />
Esecuzione<br />
movimento<br />
• Ignora completamente il<br />
feedback sensoriale<br />
• Molto veloce, tipicamente<br />
usato per i mov. balistici<br />
• Il mov. non può essere<br />
modificato a seguito di<br />
eventi inaspettati (es. se il<br />
bersaglio si sposta)<br />
• Il mov. viene<br />
programmato interamente<br />
prima di essere eseguito.<br />
Eventuali correzioni<br />
implementate solo alla<br />
fine<br />
Errore Si Correzione
Combinazione dei due tipi di controllo<br />
Informazione sensoriale<br />
Intenzione motoria<br />
<strong>Sistema</strong> motorio<br />
Previsione<br />
(Feed-forward)<br />
Output motorio<br />
(fase iniziale)<br />
Informazione<br />
sensoriale<br />
Feed-back<br />
Output motorio<br />
(fase finale)
Combinazione dei due tipi di controllo<br />
• Il sistema motorio programma il mov. desiderato<br />
prevedendone le caratteristiche sulla base delle info<br />
sensoriali disponibili (programma motorio)<br />
• Informazioni sensoriali utilizzate prima dell’esecuzione<br />
del mov. (feedforward)<br />
– Non durante veloce<br />
– Feedforward necessita apprendimento<br />
• <strong>Sistema</strong> feedback per correzione errori durante<br />
l’esecuzione, soprattutto nelle fasi che richiedono maggior<br />
accuratezza