Algoritmi per l'interpolazione polinomiale Implementazione MATLAB
Algoritmi per l'interpolazione polinomiale Implementazione MATLAB
Algoritmi per l'interpolazione polinomiale Implementazione MATLAB
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
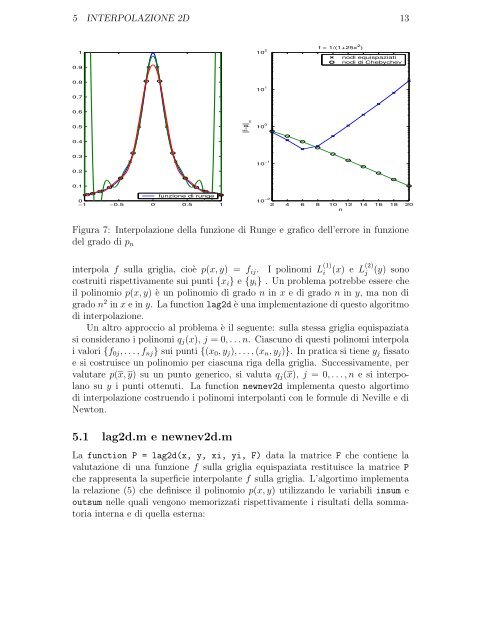
5 INTERPOLAZIONE 2D 1310.910 2 f = 1/(1+25x 2 )nodi equispaziatinodi di Chebychev0.80.710 10.60.5||f−p|| ∞10 00.40.30.210 −10.1funzione di runge0−1 −0.5 0 0.5 110 −22 4 6 8 10 12 14 16 18 20nFigura 7: Interpolazione della funzione di Runge e grafico dell’errore in funzionedel grado di p ninterpola f sulla griglia, cioè p(x, y) = f ij . I polinomi L (1)i (x) e L (2)j (y) sonocostruiti rispettivamente sui punti {x i } e {y i } . Un problema potrebbe essere cheil polinomio p(x, y) è un polinomio di grado n in x e di grado n in y, ma non digrado n 2 in x e in y. La function lag2d è una implementazione di questo algoritmodi interpolazione.Un altro approccio al problema è il seguente: sulla stessa griglia equispaziatasi considerano i polinomi q j (x), j = 0, . . . n. Ciascuno di questi polinomi interpolai valori {f 0j , . . . , f nj } sui punti {(x 0 , y j ), . . . , (x n , y j )}. In pratica si tiene y j fissatoe si costruisce un polinomio <strong>per</strong> ciascuna riga della griglia. Successivamente, <strong>per</strong>valutare p(x, y) su un punto generico, si valuta q j (x), j = 0, . . . , n e si interpolanosu y i punti ottenuti. La function newnev2d implementa questo algortimodi interpolazione costruendo i polinomi interpolanti con le formule di Neville e diNewton.5.1 lag2d.m e newnev2d.mLa function P = lag2d(x, y, xi, yi, F) data la matrice F che contiene lavalutazione di una funzione f sulla griglia equispaziata restituisce la matrice Pche rappresenta la su<strong>per</strong>ficie interpolante f sulla griglia. L’algortimo implementala relazione (5) che definisce il polinomio p(x, y) utilizzando le variabili insum eoutsum nelle quali vengono memorizzati rispettivamente i risultati della sommatoriainterna e di quella esterna: