H1MC-PI
H1MC-PI
H1MC-PI

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
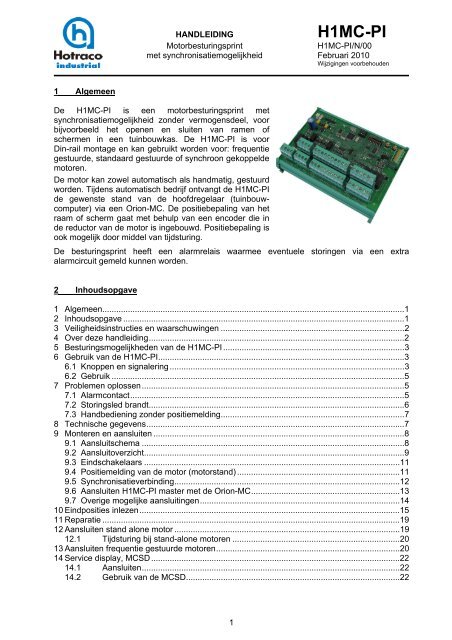
Z HANDLEIDING <strong>H1MC</strong>-<strong>PI</strong>Motorbesturingsprint<strong>H1MC</strong>-<strong>PI</strong>/N/00met synchronisatiemogelijkheid Februari 2010Wijzigingen voorbehouden1 AlgemeenDe <strong>H1MC</strong>-<strong>PI</strong> is een motorbesturingsprint metsynchronisatiemogelijkheid zonder vermogensdeel, voorbijvoorbeeld het openen en sluiten van ramen ofschermen in een tuinbouwkas. De <strong>H1MC</strong>-<strong>PI</strong> is voorDin-rail montage en kan gebruikt worden voor: frequentiegestuurde, standaard gestuurde of synchroon gekoppeldemotoren.De motor kan zowel automatisch als handmatig, gestuurdworden. Tijdens automatisch bedrijf ontvangt de <strong>H1MC</strong>-<strong>PI</strong>de gewenste stand van de hoofdregelaar (tuinbouwcomputer)via een Orion-MC. De positiebepaling van hetraam of scherm gaat met behulp van een encoder die inde reductor van de motor is ingebouwd. Positiebepaling isook mogelijk door middel van tijdsturing.De besturingsprint heeft een alarmrelais waarmee eventuele storingen via een extraalarmcircuit gemeld kunnen worden.2 Inhoudsopgave1 Algemeen..................................................................................................................................12 Inhoudsopgave .........................................................................................................................13 Veiligheidsinstructies en waarschuwingen ...............................................................................24 Over deze handleiding..............................................................................................................25 Besturingsmogelijkheden van de <strong>H1MC</strong>-<strong>PI</strong> ..............................................................................36 Gebruik van de <strong>H1MC</strong>-<strong>PI</strong>..........................................................................................................36.1 Knoppen en signalering.....................................................................................................36.2 Gebruik ..............................................................................................................................57 Problemen oplossen.................................................................................................................57.1 Alarmcontact......................................................................................................................57.2 Storingsled brandt..............................................................................................................67.3 Handbediening zonder positiemelding...............................................................................78 Technische gegevens...............................................................................................................79 Monteren en aansluiten ............................................................................................................89.1 Aansluitschema .................................................................................................................89.2 Aansluitoverzicht................................................................................................................99.3 Eindschakelaars ..............................................................................................................119.4 Positiemelding van de motor (motorstand) ......................................................................119.5 Synchronisatieverbinding.................................................................................................129.6 Aansluiten <strong>H1MC</strong>-<strong>PI</strong> master met de Orion-MC................................................................139.7 Overige mogelijke aansluitingen......................................................................................1410 Eindposities inlezen................................................................................................................1511 Reparatie ................................................................................................................................1912 Aansluiten stand alone motor .................................................................................................1912.1 Tijdsturing bij stand-alone motoren ........................................................................2013 Aansluiten frequentie gestuurde motoren...............................................................................2014 Service display, MCSD...........................................................................................................2214.1 Aansluiten...............................................................................................................2214.2 Gebruik van de MCSD............................................................................................221
3 Veiligheidsinstructies en waarschuwingenDeze handleiding bevat alle nodige informatie voor het aansluiten, inregelen en bedienen vandit product. Lees de handleiding zorgvuldig door voordat u het product gaat installeren engebruiken.De installatie waarvan dit product deel uit maakt dient te worden verzorgd door een erkendeinstallateur, volgens de daarvoor geldende normen (bijvoorbeeld NEN-ISO enz.).De installatie, waar dit product deel van is, moet voorzien zijn van een deugdelijk alarmsysteemdat periodiek (minimaal 1x per dag) gecontroleerd moet worden op een juiste werking.Verder wijzen wij u met nadruk op het volgende: Dit is een elektronisch apparaat en u moet er altijd rekening mee houden dat een eventueletechnische storing op kan treden. Het is noodzakelijk om de alarmcontacten van de verschillende apparaten op een centralealarmeenheid aan te sluiten. Bovendien adviseert Hotraco Industrial BV om een extraonafhankelijke alarminstallatie te installeren. Hotraco Industrial BV heeft er alles aan gedaanom bij calamiteiten afdoende te alarmeren. Helaas kan Hotraco Industrial BV dit nooit 100 %garanderen. Een beschadigde <strong>H1MC</strong>-<strong>PI</strong> is onveilig! Laat de <strong>H1MC</strong>-<strong>PI</strong> zoveel mogelijk onder spanning staan. Dit apparaat valt onder de garantie- en aansprakelijkheidsregeling, zoals o.a. bepaald in dealgemene Hotraco Industrial verkoopvoorwaarden, die op de overeenkomst waarmee ditapparaat is geleverd, van toepassing zijn geweest.4 Over deze handleidingDeze handleiding bestaat uit twee delen.- Informatie voor de gebruiker, hoofdstuk 5- 7. In dit deel vindt u de informatie die nodig is voorhet dagelijkse gebruik van de <strong>H1MC</strong>-<strong>PI</strong>. De gebruiker moet voldoende ervaring hebben methet gebruik van dit soort regelapparatuur.- Informatie voor de installateur, hoofdstuk 8 – 14. In dit deel vindt u de informatie die nodig isvoor het installeren van de <strong>H1MC</strong>-<strong>PI</strong>. Naast deze informatie kan de informatie in de overigehoofdstukken van belang zijn voor het correct installeren van de <strong>H1MC</strong>-<strong>PI</strong>. De installateurmoet voldoende kennis en ervaring bezitten met elektrische regelapparatuur om de<strong>H1MC</strong>-<strong>PI</strong> te kunnen installeren.In deze handleiding worden de volgende symbolen gebruikt:AttentieOpmerking2
5 Besturingsmogelijkheden van de <strong>H1MC</strong>-<strong>PI</strong>De <strong>H1MC</strong>-<strong>PI</strong> kan zowel automatisch als handmatig worden aangestuurd. In automatisch bedrijfwordt de <strong>H1MC</strong>-<strong>PI</strong> aangestuurd vanuit de Orion-MC. De hoofdregelaar (tuinbouwcomputer)geeft aan de Orion-MC door of de ramen of schermen moet openen of moet sluiten.De <strong>H1MC</strong>-<strong>PI</strong> kan gebruikt worden als: Stand alone motorbesturingsprintMotorsturing vindt plaats door middel van relais en een omkeerschakeling of door middelvan een motor unit (MU-1) Frequentie gestuurde motorbesturingsprintMotorsturing vindt plaats door middel van een frequentieregelaar Synchroon gekoppelde motorbesturingsprintIdem aan de stand alone, met mogelijkheid tot het synchroon sturen van gekoppeldemotoren door middel van meerdere <strong>H1MC</strong>-<strong>PI</strong> printen. Gebruik makend van deCAN-Sync kunnen de printen, maximaal 8, onderling met elkaar communiceren(één master <strong>H1MC</strong>-<strong>PI</strong> en 7 slaves)6 Gebruik van de <strong>H1MC</strong>-<strong>PI</strong>6.1 Knoppen en signaleringDe <strong>H1MC</strong>-<strong>PI</strong> heeft op de print een rode storingsled en driebedieningsknoppen met ieder een groene signaalled.ERRORBedieningsknoppenDe bedieningsknoppen hebben de volgende functies.OPEN CLOSE AUTOOPENCLOSEAUTOSchermen of ramen handmatig opensturen. Als tijdens het handmatig opensturen deknop “AUTO” kort wordt ingedrukt, zal de motor door blijven lopen zonder dat eenknop ingedrukt hoeft te worden. Door daarna kort op één van de knoppen “OPEN” of“CLOSE” te drukken stopt de motor. Zodra de eindpositie wordt bereikt zal de motorautomatisch stoppen. Druk op knop “AUTO” om weer over te schakelen naarautomatisch bedrijf.Schermen of ramen handmatig dicht sturen. Als tijdens het handmatig dichtsturen deknop “AUTO” kort wordt ingedrukt, zal de motor door blijven lopen zonder dat eenknop ingedrukt hoeft te worden. Door daarna kort op één van de knoppen “OPEN” of“CLOSE” te drukken stopt de motor. Zodra de eindpositie wordt bereikt zal de motorautomatisch stoppen. Druk op knop “AUTO” om weer over te schakelen naarautomatisch bedrijf.Automatisch bedrijf . Druk op knop “OPEN” of knop “CLOSE” om over te schakelennaar handmatig bedrijf.Bij synchroon gekoppelde motoren maakt het niet uit op welke <strong>H1MC</strong>-<strong>PI</strong> demotoren bediend worden. De knoppen van iedere <strong>H1MC</strong>-<strong>PI</strong> kunnen door elkaargebruikt worden.3
Handbedieningmodule (optie)Wanneer de handbedieningmodule of een schakelaar is aangesloten, zullen de knoppen op de<strong>H1MC</strong>-<strong>PI</strong> niet functioneren. De bediening van de motor kan dan alleen door middel van dehandbedieningmodule of schakelaar worden uitgevoerd zie hoofdstuk 9.7.Sleutelschakelaar (optie)Wanneer een sleutelschakelaar is aangesloten, kunnen de knoppen op de <strong>H1MC</strong>-<strong>PI</strong> alleengebruikt worden als deze met de sleutelschakelaar zijn vrijgegeven zie hoofdstuk 9.7.SignaalledBij iedere bedieningsknop op de print bevindt zich een signaalled. De ledsgeven informatie over de bedrijfstoestand van de motor. De signaalled kanAAN of UIT zijn maar kan ook knipperen. Een led kan op twee manierenknipperen.1) De led licht steeds kortstondig op (flash)2) De led gaat steeds AAN en UIT.signaal LEDDe volgende tabel geeft een overzicht van de betekenis van de status van een led tijdensnormaal bedrijf met en zonder handbedieningmodule.OPEN CLOSE AUTOOmschrijvingUIT UIT AAN De motor is in automatisch bedrijf.AAN UIT AANUIT AAN AANAANUITAANUITUITUITUITDe motor wordt door de Orion-MCopengestuurd.De motor wordt door de Orion-MCdichtgestuurd.De motor is in handmatig bedrijf.De motor is in handmatig bedrijf en wordthandmatig opengestuurd.De motor is in handmatig bedrijf en wordthandmatig dichtgestuurd.Geen input van de Orion-MC, ziehoofdstuk 7.2.Eindposities zijn niet ingelezen.UIT UIT UIT Motor uitgeschakeld.Als de motor wordt gestuurd terwijl de eindpositie is bereikt dan zal de motor nietlopen maar de led wel branden.StoringsledLinks van de bedieningsknoppen bevindt zich een storingsled. Deze led gaat branden als ereen storing is opgetreden. Zie voor meer informatie hoofdstuk 7.4
6.2 GebruikAutomatisch bedrijfDe <strong>H1MC</strong>-<strong>PI</strong> ontvangt de gewenste motorpositie van de Orion-MC. De <strong>H1MC</strong>-<strong>PI</strong> stuurtvervolgens de motor naar de gewenste positie.Bij synchroon gekoppelde <strong>H1MC</strong>-<strong>PI</strong>'s zullen de motoren synchroon lopen. Dit gaat als volgt:M1 M2 M3 M1 M2 M3 M1 M2 M3HystereseAls een motor iets sneller loopt (in het voorbeeld is dit M2) dan zal deze op een gegevenmoment steeds meer voor gaan lopen. Als het verschil is opgelopen tot meer dan de hysteresedan zal de motor tijdelijk stoppen totdat deze weer gelijk loopt met de rest. De hysterese istijdens de inleesprocedure bepaald.Handmatig bedrijfDe stand van het raam of scherm kan handmatig gewijzigd worden met de “OPEN” of“CLOSE” toets. Synchroon gekoppelde motoren zullen gelijk lopen met de motor die wordtversteld. Dit gaat volgens hetzelfde principe als beschreven bij automatisch bedrijf. Met de“AUTO” toets kan weer overgeschakeld worden naar automatisch bedrijf. Bij synchroongekoppelde motoren kan dit op elke <strong>H1MC</strong>-<strong>PI</strong>.Automatische eindstandcorrectieTelkens als een eindschakelaar wordt geactiveerd wordt de encoderpositie opnieuwgesynchroniseerd.Als de encoderpositie in de eindstand meer dan 1% afwijkt van de inleespositiedan zal er via de Orion-MC een waarschuwing gegeven worden. Bij een afwijkinghoger dan 1,5% volgt er een alarm (zie ook hoofdstuk 7.2).7 Problemen oplossen7.1 AlarmcontactDe <strong>H1MC</strong>-<strong>PI</strong> heeft een alarmcontact dat afvalt als:- De voedingsspanning wegvalt.- Als een aangesloten Orion-MC een alarm heeft waarbij ook het alarmcontact van de<strong>H1MC</strong>-<strong>PI</strong> moet uitschakelen.- Als er een storing is opgetreden, de rode storingsled brandt dan ook (zie hoofdstuk 7.2).5
7.2 Storingsled brandtDe Storingsled gaat branden zodra er een storing optreedt. Raadpleeg in dat geval deonderstaande tabel.Bij synchroon gekoppelde motoren gaat de led branden op de <strong>H1MC</strong>-<strong>PI</strong> die daadwerkelijk eenstoring heeft. Bij de overige <strong>H1MC</strong>-<strong>PI</strong>'s geven de leds een flashsignaal ( ).Bij synchroon gekoppelde motoren wordt in de Orion-MC aangegeven welke <strong>H1MC</strong>-<strong>PI</strong> slaveeen storing heeft. Als een <strong>H1MC</strong>-<strong>PI</strong> een storing heeft dan wordt alleen het motornummerweergegeven.Mogelijke oorzaakMotor thermischoverbelast.Noodeindschakelaargeactiveerd.Encoder defect of hetcontact met encoder isverbroken.Alarm op de Orion-MC.Breekbeveiliging isverbroken.Eindposities niet correctingelezen.Encoder positie in deeindstand wijkt teveel af.Geen ingangssignaal viade CAN-Local databus.CAN-Sync databusstoring.Een synchroongekoppelde <strong>H1MC</strong>-<strong>PI</strong>krijgt geen spanning.Meldingen en oplossing- Melding op de Orion-MC 'Break input'.- Controleer de motor.- Zoek de reden voor de overbelasting en los het probleem op.- Reset de <strong>H1MC</strong>-<strong>PI</strong> met een van de bedieningsknoppen.- Melding op de Orion-MC 'Nood eindschakelaar'.- Controleer de motor en de installatie.- Herstel de situatie. Haal de motor van de noodeindschakelaar.- Reset de <strong>H1MC</strong>-<strong>PI</strong> met een van de bedieningsknoppen.- Indien nodig de eindstanden opnieuw inlezen.- Melding op de Orion-MC 'Geen terugmelding', 'Foutsignaal encoder'of 'Motor loopt niet'.- De motor kan alsnog gebruikt worden in de stand ‘handbedieningzonder positiemelding’. Zie hoofdstuk 7.3- Kijk of er een alarmmelding op de Orion-MC is.- Melding op de Orion-MC 'Break input'.- Controleer de installatie en herstel de beveiliging.- Reset de <strong>H1MC</strong>-<strong>PI</strong> met een van de bedieningsknoppen “OPEN”,“CLOSE” of “AUTO”.- Melding op de Orion-MC 'Te weinig pulsen' of 'Pulsen te snel'.- De leds bij “OPEN”, “CLOSE” en “AUTO” knipperen als volgt. De eindposities moeten opnieuw worden ingelezen.- Melding op de Orion-MC 'positie wijkt af'.- De eindpositie(s) zijn teveel verschoven waardoor deencoderpositie in de eindstand teveel afwijkt. De eindpositiesmoeten opnieuw worden ingelezen (zie hoofdstuk 10).- Geen melding op de Orion-MC.- De led AUTOknippert als volgt . De <strong>H1MC</strong>-<strong>PI</strong> ontvangtgeen ingangssignaal. Controleer de CAN-bus.- Melding op de Orion-MC 'Motor xx, slave xx niet gevonden'- Controleer de CAN-Sync verbindingen.- Reset de <strong>H1MC</strong>-<strong>PI</strong> met een van de bedieningsknoppen.- Wanneer er meerdere <strong>H1MC</strong>-<strong>PI</strong>’s betrokken zijn bij deze storingdan hoeft er maar één <strong>H1MC</strong>-<strong>PI</strong> gereset te worden.- Alarm op de overige <strong>H1MC</strong>-<strong>PI</strong>'s, deze kunnen niet bediend worden.- Herstel de Stroomvoorziening en reset de geblokkeerde <strong>H1MC</strong>-<strong>PI</strong>’smet een willekeurige toets.Tijdens het inlezen van de motor knippert de storingsled. Als tijdens het inlezende storingsled continu gaat branden dan is er een storing opgetreden.6
7.3 Handbediening zonder positiemeldingWanneer de positiemeting met de encoder defect is dan valt het alarmcontact af op het momentdat de motor moet gaan bewegen. In dat geval kan het raam of scherm nog op de volgendemanier verplaatst worden.- Druk 3 seconden lang op een van de knoppen “OPEN” of “CLOSE”. De leds bij “OPEN” en“CLOSE” gaan knipperen (). Het alarm wordt onderdrukt.- De motor is nu in de stand 'handbediening zonder positiemelding' De motor kan nu alleen noghandmatig bediend worden met de bedieningsknoppen “OPEN” en “CLOSE”.Hierdoor worden de inleesposities ontregeld! Na reparatie van de encodermoeten de eindposities opnieuw worden ingelezen, zie hoofdstuk 10.8 Technische gegevensElektrischVoedingsspanning: 24 Vdc, 200 mA (exclusief uitgangen)Zekering: Resetable fuse 0,75 ACAN-Local communicatieProtocol : CAN-LocalBenodigde kabel: CAN-BK, twisted pair 2x 0,64mm 2 + afschermingMaximale lengte: 500 meter @ 100 kbs (verlengbaar d.m.v. een CAN-Switch)CAN-Sync communicatieProtocol : CAN-SyncBenodigde kabel: CAN-BK, twisted pair 2x 0,64mm 2 + afschermingMaximale lengte: 500 meter @ 100 kbs (verlengbaar d.m.v. een CAN-Switch)Analoge ingangen0…10 V stuursignaal : 0-10 V (R i = )Terugkoppelingssignaal : 0-10 k0-5 V; 0-20 mA (niet in gebruik)Digitale ingangenOpen/Close/Auto/Jogsp/Alarm : NPN / PNP sensor, 12..24Vdc, 8mAEindschakelaars : 24 VdcEncoder : 5V, ingangssignaal A, A, B, B: Afgeschermde UTP kabel, cat 5eAnaloge uitgangPositie motor 0…5 V: max. 1 mA,Digitale uitgangenFreq. regelaar Start/Open/Close : 0,5 A, 24 Vac/dcFreq. regelaar Jogsp: 0,5 A, 24 Vac/dcAlarmrelais: 0,5 A, 24 Vac/dcExterne storingsled: 10 mAVoeding 24 VdcStroom: max. 35 mACE-richtlijnenEMC: 2004 / 108 / EGLaagspanning: 2006 / 95 / EGMechanischOmgevingstemperatuur : 0…40 CAfmetingen (H x B x D): 126 x 165 x 74 mmGewicht: ca. 1 kg7
9 Monteren en aansluitenDe installatie van dit product dient te worden uitgevoerd door een erkende installateur, volgensde daarvoor geldende normen (bijvoorbeeld NEN-ISO enz.). De installateur moet voldoendekennis en ervaring bezitten met elektrische regelapparatuur om de <strong>H1MC</strong>-<strong>PI</strong> te kunneninstalleren.Lees eerst de montage-instructies goed door voordat u begint met monteren en aansluiten.9.1 AansluitschemaCON6+5VSDASCLGNDPOWERCAN OKEEPROMCON10CON7ONERROR1 2 3 4 5 6 7 8OPEN CLOSE AUTOENC. B8CON11UART DISPLAY / MCSDENC. AEMERGALARMCAN-IORxD TxDCAN SYNCRxD TxDOP CL AUJ2TH LOWSP.0...5VCON5POT0...20mA OP CL JOGSP1CAN-LocalterminationCAN-SyncterminationLIMIT SWITCHOP CL EMER.K1K2CON9CON13BREAK25 26 27 2829 30 31 32 33 34 35 36 37 3839 40 41 42 43 44CON11 2 3 424V GND EMERGCON25 6 7 8H L BREAKALARMSYNCH LCON39 10 11 12 13 14 15 16 17 18 19 20 21 22 23 2424V LED FB GND 0..10 GND 24 GND 0..5 GND ALARM JOGSP +24V GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.E COM ST OP CL JOGSPCON424VdcGNDVoeding8
ORION10MCORIONCmu lt ionn ect10 M COPEN CL OSE AUT O OP EN CLOSE AUT O OPEN CL OSE AUTOOP EN CLO SE AU TO OP EN CL O SE AU TO OP EN CL O SE AU TO9.2 Aansluitoverzicht9.2.1 Stand-alone motorenDe <strong>H1MC</strong>-<strong>PI</strong> kan als stand-alone motorbesturingsprint gebruikt worden.Orion<strong>H1MC</strong>-<strong>PI</strong><strong>H1MC</strong>-<strong>PI</strong><strong>H1MC</strong>-<strong>PI</strong>CAN-Local CAN-Local CAN-LocalM1 M2 M3Hoofdstroom voor de motorenEindschakelaars, zie hoofdstuk 9.3Terugkoppeling (encoder), zie hoofdstuk 9.4CAN-Local Can-Local, zie hoofdstuk 9.69.2.2 Frequentie geregelde motorenOrion<strong>H1MC</strong>-<strong>PI</strong><strong>H1MC</strong>-<strong>PI</strong><strong>H1MC</strong>-<strong>PI</strong>lt iCmuonn ectCAN-LocalFreq.regelaarFreq.regelaarHoofdstroom Hoofdstroom HoofdstroomFreq.regelaarM1M2M2Frequentie regelaars en motorenStuursignalen frequentieregelaar, zie hoofdstuk 13Eindschakelaars, zie hoofdstuk 9.3Terugkoppeling (encoder), zie hoofdstuk 9.4CAN-Local Can-Local, zie hoofdstuk 9.69
multionne ct35RSOPEN CLOSE AUTOOPEN CLOSE AUTOOPEN CLOSE AUTO9.2.3 Synchroon gekoppelde motorenMet behulp van meerdere <strong>H1MC</strong>-<strong>PI</strong>'s is het mogelijk om mechanisch gekoppelde motorensynchroon gekoppeld te laten lopen.Synchroon gekoppelde motoren is niet mogelijk bij frequentie gestuurde motoren!Bij synchroon gekoppelde motoren is één motor aangesloten op de <strong>H1MC</strong>-<strong>PI</strong> master. Dezewordt aangestuurd door de Orion-MC via de CAN-Local databus zie hoofdstuk 9.6. Dit is ook demotor die in de Orion-MC wordt geregistreerd en door de Orion-MC een in een motorgroepopgenomen kan worden. De overige motoren zijn ieder aangesloten op een <strong>H1MC</strong>-<strong>PI</strong> slave. De<strong>H1MC</strong>-<strong>PI</strong>'s communiceren met elkaar via de CAN-Sync databus zie hoofdstuk 9.5. Per <strong>H1MC</strong>-<strong>PI</strong> kunnen maximaal 7 slaves aangesloten worden. De <strong>H1MC</strong>-<strong>PI</strong> slaves worden nietgeregistreerd in de Orion-MC (deze nemen toch steeds dezelfde positie aan als de <strong>H1MC</strong>-<strong>PI</strong>master).Master nr. 1M1Scherm 1SlaveM2Scherm 2Orion-MCORIONCSlaveM3Scherm 3Hoofdstroom motorenEindschakelaars, zie hoofdstuk 9.39.3Terugkoppeling (encoder), 9.4CAN-Sync Can-Sync, zie hoofdstuk 9.5CAN-Local Can-Local, zie hoofdstuk 9.6Motoren die op deze wijze gesynchroniseerd worden moeten voldoen aan de volgendevoorwaarden; De synchroon gekoppelde motoren moeten gelijk aan elkaar zijn (toerental van deelektromotor, de overbrengingsverhouding, aansluitspanning, etc.) Voor de terugkoppeling van de motorpositie kan alleen een encoder worden gebruikt. Hettoerental van elke encoder moet gelijk zijn (gebruik dezelfde inbouwsets met dezelfdeoverbrengingsverhouding).10
9.3 EindschakelaarsStel de eindschakelaars van de motor af volgens de instructies van de motorleverancier. Zorgdat een eindschakelaar wordt geactiveerd als het scherm (of raam) in de uiterste stand staat.Sluit de eindschakelaars van de motor aan op de digitale ingangen van con 3.Zorg dat de juiste eindschakelaar bij de juiste looprichting hoort.Op de <strong>H1MC</strong>-<strong>PI</strong> kunnen extra eindschakelaars aangesloten worden die zorgen voor een veiligestop (noodstop) als de normale eindschakelaars dienst weigeren.CON313 14 15 16 17 1813 14 15 16 17 1829 30 31 32 33 34 35 36 37 38CON39 10 11 12 13 14 15 16 17 18GND GND24V LED FB 0..10 24V GND 0..5 GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.EOPENDICHTNOODSTOPOPENDICHTNOODSTOPmogelijkheid 1 mogelijkheid 29.4 Positiemelding van de motor (motorstand)De stand van de motor kan alleen bepaald worden met behulp van een encoder.CON 5Naar encoderMet een encoder wordt de motorstand digitaalbepaald met behulp van pulstelling. De begin- eneindstand worden relatief bepaald. Een encodermoet worden aangesloten met het volgende typekabel:BruinBruin/WitGroenBlauw/WitBlauwGroen/WitOranjeOranje/Wit81Afgeschermde UTP kabel (STP kabel) cat 5e voorencoders. De kleurcodering van kabel moetvolgens de EIA/TIA 568B standaard zijn. Dekleurvolgorde in beide stekkers moet hetzelfde zijn(rechte STP kabel).8 mmMonteer de afscherming zoals aangegevenin de tekening hiernaast. Draai de aardklemniet te vast aan omdat anders de kabelbeschadigd wordt. Aan de andere zijdedient afscherming geaard te worden bij demotor, zie hiervoor de handleiding van deencoder.11
9.5 SynchronisatieverbindingAansluitenDe communicatie tussen de <strong>H1MC</strong>-<strong>PI</strong> master en de <strong>H1MC</strong>-<strong>PI</strong> slaves vindt plaats via deCAN-Sync databus. In het volgende voorbeeld is de master de eerste <strong>H1MC</strong>-<strong>PI</strong> in het rijtje.Echter de master mag ook ergens anders geplaats worden.CAN-SyncMAX. 500 mtr @ 100Kbs25 26 27 28<strong>H1MC</strong>-<strong>PI</strong> Master <strong>H1MC</strong>-<strong>PI</strong> Slave 1 <strong>H1MC</strong>-<strong>PI</strong> Slave n(laatste <strong>H1MC</strong>-<strong>PI</strong>)CON13CON13CON13CON15 6 7 8CAN-SyncafsluitingCON15 6 7 8CAN-SyncafsluitingCON15 6 7 8CAN-SyncafsluitingCON25 6 7H L BREAKALARMSYNCH L12341 2 3 41 2 3 48 H L H L H LCON2<strong>H1MC</strong>-<strong>PI</strong>Twisted pair 1x2x0,64 + afschermingCAN-BK HO50010640Bij de CAN-Sync communicatie is het belangrijk dat decommunicatiebus wordt afgesloten bij het eerste en laatstecommunicatieknooppunt. Als een <strong>H1MC</strong>-<strong>PI</strong> een eindpunt is inde communicatiebus dan dient de bus te worden afgeslotenmet de jumper op CON 13.max. 30mmAfschermingMonteer de afscherming van de CAN-Sync zoalsaangegeven in de tekening hiernaast. Draai deaardklem niet te vast aan omdat anders de kabelbeschadigd wordt.DipswitchesDe communicatie wordt ingesteld met de dipswitches op de print.<strong>H1MC</strong>-<strong>PI</strong> type (master of slave)Dipswitch 7 bepaalt of de <strong>H1MC</strong>-<strong>PI</strong> een master of een slave is. Alsdipswitch 7 in de stand 'OFF' (omlaag) staat is de besturingsprint een<strong>H1MC</strong>-<strong>PI</strong> master. In de stand 'ON' (omhoog) is de besturingsprint eenslave (zie afbeelding).ON1 2 3 4 5 6 7 812
<strong>H1MC</strong>-<strong>PI</strong> slave-adres instellenElk apparaat op de CAN-Sync databus moet een uniek nummer (adres) hebben. Het adres vande <strong>H1MC</strong>-<strong>PI</strong> master voor de CAN-Sync communicatie wordt automatisch op 0 gezet.Het adres van de <strong>H1MC</strong>-<strong>PI</strong> slave voor de CAN-Sync databus dient met de dipswitches 1 t/m 3te worden ingesteld. Begin bij het nummeren van de slaves altijd bij 1.Adres Dipswitch Adres Dipswitch1 2 3 1 2 31 52 63 74ON1 2 3 4 5 6 7 8SlavemotorOp de <strong>H1MC</strong>-<strong>PI</strong> master dient een nummer voor de CAN-Local communicatieingesteld te worden. Dit staat beschreven in hoofdstuk 9.6.9.6 Aansluiten <strong>H1MC</strong>-<strong>PI</strong> met de Orion-MCWanneer een Orion-MC als communicatie-interface tussen de hoofdregelaar en de<strong>H1MC</strong>-<strong>PI</strong> gebruikt wordt, wordt de gewenste positie (en ander informatie) via de CAN-Localcommunicatie doorgegeven aan de <strong>H1MC</strong>-<strong>PI</strong>.ORION-MCH L<strong>H1MC</strong>-<strong>PI</strong>25 26 27 28CON2<strong>H1MC</strong>-<strong>PI</strong>CON25 6 7 8H L BREAKALARMSYNCH LCAN-LocalMAX. 500 mtr @ 100KbsCAN MODULE 1 CAN MODULE 2 CAN MODULE n( <strong>H1MC</strong>-<strong>PI</strong>) ( <strong>H1MC</strong>-<strong>PI</strong>)(Laatste <strong>H1MC</strong>-<strong>PI</strong>)CAN-LocalafsluitingCAN-LocalafsluitingCAN-LocalafsluitingCON 9CON 9 CON 9H L H L H Lmax. 30mmTwisted pair 1x2x0,64 + afschermingCAN-BK HO50010640Monteer de afscherming van de CAN-Local zoals aangegeven in de afbeelding oppagina 12. Draai de aardklem niet te vast aan omdat anders de kabel beschadigd.13
<strong>H1MC</strong>-<strong>PI</strong> adres instellenBij de CAN-Local communicatie is het belangrijk dat de communicatiebus wordt afgesloten bijhet eerste en laatste communicatieknooppunt. Als een <strong>H1MC</strong>-<strong>PI</strong> een eindpunt is in decommunicatiebus dan dient de bus te worden afgesloten met de jumper op CON9.Elk apparaat op de CAN-Local communicatiebus moet een uniek nummer (adres) hebben. Stelhet computeradres van de <strong>H1MC</strong>-<strong>PI</strong> master in via de dipswitch op de print (zie de afbeelding oppagina 12). Alleen dipswitch 1 t/m 5 zijn bedoeld om het adres in te stellen.Adres Dipswitch Adres Dipswitch Adres Dipswitch Adres Dipswitch1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 1 2 3 4 51 9 17 252 10 18 263 11 19 274 12 20 285 13 21 296 14 22 307 15 23 318 16 24 32Het nummer voor de CAN-Sync communicatie wordt automatisch ingesteld. Ditstaat beschreven in hoofdstuk 9.5.9.7 Overige mogelijke aansluitingenHandbedieningmodule / schakelaarCON329 30 31 32 33 34 35 36 37 38CON39 10 11 12 13 14 15 16 17 1824V LED FB GND 0..10 GND 24V GND 0..5 GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.E9 10 11 12 29 30 32COMMGNDOPENCLOSEAUTO24VdcLEDEr kan een handbedieningmodule ofeen schakelaar aangesloten worden opde <strong>H1MC</strong>-<strong>PI</strong>.11 12 29 32Indien geen handbedieningmodule wordt toegepast,dienen volgende doorverbindingen teworden aangeslotenDe handbedieningmodule kan alleen op een <strong>H1MC</strong>-<strong>PI</strong> master aangesloten worden.De handbedieningmodule kan niet gebruikt worden voor het inlezen van deeindposities.AlarmCON225 26 27 285 6 7 8H L BREAKALARMSYNCH L5 6Volgend alarmcontactof alarmeenheidHet alarmcontact is een potentiaalvrij contact datkan worden opgenomen in een alarmcircuit. Bij eenalarm zal het alarm contact verbroken worden. Zieook hoofdstuk 7.14
BreekbeveiligingCON225 26 27 285 6 7 8H L BREAKALARMSYNCH L27 28Breekcontact /MotorbeveiligingDe <strong>H1MC</strong>-<strong>PI</strong> heeft een digitale ingang waarop het contactvan een breekbeveiliging / motorbeveiliging aangeslotenkan worden. Als deze ingang is verbroken stopt de motor(en de gekoppelde motoren) en wordt er een alarmgegeven (zie ook hoofdstuk 7). Wanneer deze functie nietwordt toegepast dienen klem 27 en klem 28 met elkaarverbonden zijn.Toegepast als breekbeveiliging: Als een scherm door twee of meer motoren tegelijkaangedreven wordt dan kunnen de assen met een breekkoppeling verbonden zijn. Als de assenniet meer synchroon lopen dan zal het contact van de breekkoppeling verbroken wordenwaardoor de motoren stoppen.0-10V signaalCON329 30 31 32 33 34 35 36 37 38CON39 10 11 12 13 14 15 16 17 1824V LED FB GND 0..10 GND 24V GND 0..5 GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.ESleutelschakelaar33 340-10VGND0 - 10VDe <strong>H1MC</strong>-<strong>PI</strong> kan ook aangestuurd wordenvia een 0..10V signaal. Het voltage op deingang geeft dan aan wat de positie moetzijn. Bij 0V moet het raam bijvoorbeeldgesloten zijn en bij 10V moet het raamhelemaal open staan. In dat geval zal bij4,5V het raam voor 45% geopend zijn. De<strong>H1MC</strong>-<strong>PI</strong> die dit signaal ontvangt stuurt demaster-motor aan.CON329 30 31 32 33 34 35 36 37 38CON39 10 11 12 13 14 15 16 17 1824V LED FB GND 0..10 GND 24V GND 0..5 GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.E33 35 De bedieningstoetsen van de <strong>H1MC</strong>-<strong>PI</strong> kunnen,indien gewenst, geblokkeerd worden met een sleutelschakelaar.Door met een 24V signaal de 0-10Vsignaal hoog te maken worden de bedieningstoetsenSleutelschakelaargeblokkeerd. Als deze functie gebruikt wordt kunt ude motoren niet meer aansturen via; 0-10V signaal,handbedieningmodule of schakelaar.10 Eindposities inlezenAlgemeenOm te zorgen dat de <strong>H1MC</strong>-<strong>PI</strong> de motorstand kan bepalen moet in de <strong>H1MC</strong>-<strong>PI</strong> vastgelegdworden wat de begin- en eindpositie van de motor is. Deze posities worden vastgelegd met eeninleesprocedure. De inleesprocedure kan altijd uitgevoerd worden. Maar de inleesproceduremoet verplicht uitgevoerd worden wanneer op de <strong>H1MC</strong>-<strong>PI</strong> alle drie de groene leds van debedieningsknoppen “OPEN”, “CLOSE” en “AUTO” gelijktijdig knipperen (). Derode storingsled brandt dan ook.OpmerkingenHet inlezen van synchroon gekoppelde motoren (<strong>H1MC</strong>-<strong>PI</strong> master met <strong>H1MC</strong>-<strong>PI</strong> slaves) wordtgelijktijdig uitgevoerd. Het inlezen wordt in dat geval uitgevoerd vanuit de <strong>H1MC</strong>-<strong>PI</strong> master.Motors op stand alone <strong>H1MC</strong>-<strong>PI</strong>'s moet ieder apart ingelezen worden.Bij synchroon gekoppelde motoren is het belangrijk dat alle motoren identiek zijn en dat depulsfrequentie van alle encoders hetzelfde is. Ook is het van belang dat de communicatietussen de master <strong>H1MC</strong>-<strong>PI</strong> en de slaves aanwezig is. Dit kunt u makkelijk controleren metbehulp van het MCSD service display, zie hoofdstuk 14.2 (punt 14).15
De inleesprocedure kan alleen via de bedieningstoetsen van de <strong>H1MC</strong>-<strong>PI</strong> uitgevoerd worden.Met de handbedieningmodule / schakelaar kan de inleesprocedure niet uitgevoerd worden.Tijdens de inleesprocedure knippert () de rode storingsled op de print. Bij eenstoring zal de led continu branden. Bij synchroon gekoppelde motoren brandt de led van de<strong>H1MC</strong>-<strong>PI</strong> met de storing. De leds op de overige <strong>H1MC</strong>-<strong>PI</strong>'s geven dan een kort flitssignaal( ). Zie voor mogelijke storingen hoofdstuk 7.Bij de eerste installatie zal de inleesprocedure altijd uitgevoerd kunnenONworden ongeacht de stand van dipswitch 8 op de <strong>H1MC</strong>-<strong>PI</strong> master. Is de1 2 3 4 5 6 7 8inleesprocedure echter al eens uitgevoerd dan moet dipswitch 8 in de stand'OFF' (omlaag) staan om de inleesprocedure te kunnen uitvoeren.Het inlezen wordt afgekeurd:- Wanneer er te weinig verschil is tussen de uiterste standen. Er zijn dan te weinig pulsentussen de begin en eindstand waardoor de <strong>H1MC</strong>-<strong>PI</strong> de motorpositie niet nauwkeurig kanbepalen. De Orion-MC geeft de melding 'Te weinig pulsen'.- Wanneer de inleessnelheid te laag of the hoog is. De inleessnelheid moet hoger zijn dan0,5 Hz en lager zijn dan 50 Hz. De Orion-MC geeft de melding 'Te weinig pulsen' of 'Pulsente snel'.InleesprocedureZorg dat de eindschakelaars in alle motoren goed zijn aangesloten, afgesteld envastgezet. Draairichting 'OPEN' moet worden gestopt door eindschakelaar'OPEN'. Hierdoor wordt voorkomen dat de motor te ver doorloopt en schadeveroorzaakt.Bij synchroon gekoppelde motoren kan de inleesprocedure alleen uitgevoerdworden met de <strong>H1MC</strong>-<strong>PI</strong> master.1 Druk vijf seconden op knop “AUTO”. De led bij “OPEN” knippert nu ( ) en geeftaan dat de eerste eindpositie ingelezen kan worden. De leds bij “CLOSE” en “AUTO” zijn uit.2 Alleen bij aansturing met een 0-10V signaal: Stuur vanuit de hoofdregelaar het regelsignaaldat overeenkomt met de positie 'OPEN' (bijvoorbeeld 10V). Bij een raam kan dit hetregelsignaal zijn wanneer een raam helemaal open staat en bij een scherm kan dit hetregelsignaal zijn als het scherm volledig opgerold is.3 Stuur met knop “OPEN” het raam of scherm in de richting 'OPEN'. Laat de motor lopentotdat de eindpositie is bereikt (tegen de eindschakelaar aan). Bij synchroon gekoppeldemotoren kunt u de motoren laten lopen totdat de eerst geactiveerde eindschakelaar isbereikt.Bij synchroon gekoppelde motoren zullen alle motoren gelijktijdig lopen. Via een algoritme inde software van de <strong>H1MC</strong>-<strong>PI</strong>'s zullen één of meerdere motoren die iets te snel lopen tijdelijkgestopt worden. Dit gebeurt geheel automatisch. Als tijdens het inlezen een motor te snelloopt, wordt de motor gestopt maar niet automatisch hervat. Er dient naar de oorzaak vanhet te snel lopen van de motor te worden gekeken (bijvoorbeeld; een verkeerdetandwieloverbrenging).Tijdens het inlezen zal een motor nooit meer voorlopen dan de basishysterese. Debasishysterese is de afstand die de motoren in twee seconden kunnen afleggen.Als blijkt dat een motor in de verkeerde richting draait dan moeten de tweefasen bij de motoraansluiting worden verwisseld. Controleer dan ALTIJD ofde aansluiting van de eindschakelaars nog correct is, zie hoofdstuk 9.3.16
Als tijdens het sturen de knop “AUTO” kort ingedrukt wordt, zal de motor doorblijven lopen zonder dat een knop ingedrukt hoeft te worden. Door daarna kort opéén van de knoppen “OPEN” of “CLOSE” te drukken stopt de motor.Als tijdens het inlezen blijkt dat de positie van een slave motor niet correct is dankan deze met de bijbehorende <strong>H1MC</strong>-<strong>PI</strong> bijgestuurd worden. Dit kan alleen als deoverige motoren (tijdelijk) gestopt zijn. Dit bijsturen kan bijvoorbeeld gebruiktworden om het scherm recht te stellen.4 Bij synchroon gekoppelde motoren kunnen twee situaties optreden. De motor van de <strong>H1MC</strong>-<strong>PI</strong> master heeft als eerste de eindpositie bereikt.Stuur nu de motoren van de <strong>H1MC</strong>-<strong>PI</strong> slaves een voor een tegen huneindschakelaar aan. De eindschakelaars mogen onderling niet meer dan 2,5% afwijken,indien dit wel het geval is verschijnt er een waarschuwing op de Orion-MC en moeten deeindschakelaars bijgesteld te worden. Een motor op een <strong>H1MC</strong>-<strong>PI</strong> slave heeft als eerste de eindpositie bereikt.Stuur nu de motor van de <strong>H1MC</strong>-<strong>PI</strong> slave die de eindpositie heeft bereikt een kleinstukje terug. Stuur daarna via de <strong>H1MC</strong>-<strong>PI</strong> master de motoren weer open totdat weereen eindschakelaar is bereikt. Als nu de eindschakelaar van de <strong>H1MC</strong>-<strong>PI</strong> mastergeactiveerd is dan kunnen de overige <strong>H1MC</strong>-<strong>PI</strong> slaves bijgesteld worden zoalshierboven is beschreven. Anders moet de motor op de <strong>H1MC</strong>-<strong>PI</strong> slave waarvan nu deeindschakelaar geactiveerd is teruggestuurd te worden. Ga zo door totdat bij allemotoren de eindschakelaars geactiveerd zijn. Als een gewijzigde positie meer dan1% afwijkt dan zal er een waarschuwing verschijnen op de Orion-MC, in dat gevaldienen de eindschakelaars bijgesteld te worden.5 Druk op de knop “AUTO” om de eindpositie(s) voor 'OPEN' in de <strong>H1MC</strong>-<strong>PI</strong>('s) vast teleggen. De eindpositie wordt in het geheugen opgeslagen. De groene led bij “CLOSE”begint te knipperen (). De led bij “OPEN” is nu uit.6 Alleen bij aansturing met een 0-10V signaal: Stuur vanuit de hoofdregelaar hetregelsignaal dat overeenkomt met de positie 'DICHT' (bijvoorbeeld 0V). Bij een raam kandit het regelsignaal zijn wanneer een raam helemaal dicht is, en bij een scherm kan dit hetregelsignaal zijn als het scherm volledig afgerold is.7 Stuur met knop “CLOSE” het raam of scherm in de richting 'DICHT' totdat de eindpositieis bereikt (tegen de eindschakelaar aan). Bij synchroon gekoppelde motoren kunt u demotoren laten lopen totdat de eerst geactiveerde eindschakelaar is bereikt.Bij synchroon gekoppelde motoren zullen alle motoren gelijktijdig lopen. Via een algoritme inde software van de <strong>H1MC</strong>-<strong>PI</strong>'s zullen een of meerdere motoren die iets te snel lopen tijdelijkgestopt worden. Dit gebeurt geheel automatisch. Als tijdens het inlezen een motor te snelloopt, wordt de motor gestopt maar niet automatisch hervat. Er dient naar de oorzaak vanhet te snel lopen van de motor te worden gekeken (bijvoorbeeld; een verkeerdetandwieloverbrenging).Tijdens het inlezen zal een motor nooit meer voorlopen dan de basishysterese. Debasishysterese is de afstand die de motoren in twee seconden kunnen afleggen.Als tijdens het sturen de knop “AUTO” kort indrukt wordt, zal de motor door blijvenlopen zonder dat een knop ingedrukt hoeft te worden. Door daarna kort op één vande knoppen “OPEN” of “CLOSE” te drukken stopt de motor.Als tijdens het inlezen blijkt dat de positie van een slave-motor niet correct is dankan deze met de bijbehorende <strong>H1MC</strong>-<strong>PI</strong> bijgestuurd worden. Dit kan alleen als deoverige motoren (tijdelijk) gestopt zijn. Dit bijsturen kan bijvoorbeeld gebruiktworden om het scherm recht te stellen.17
8 Bij synchroon gekoppelde motoren kunnen twee situaties optreden. De motor van de <strong>H1MC</strong>-<strong>PI</strong> master heeft als eerste de eindpositie bereikt.Stuur nu de motoren van de <strong>H1MC</strong>-<strong>PI</strong> slaves een voor een tegen hun eindschakelaaraan. Als de positie meer dan 1% afwijkt dan zal er een waarschuwing verschijnen op deOrion-MC, in dat geval dienen de eindschakelaars bijgesteld te worden. Een motor op een <strong>H1MC</strong>-<strong>PI</strong> slave heeft als eerste de eindpositie bereikt.Stuur nu de motor van de <strong>H1MC</strong>-<strong>PI</strong> slave die de eindpositie heeft bereikt een kleinstukje terug. Stuur daarna via de <strong>H1MC</strong>-<strong>PI</strong> master de motoren weer open totdat weereen eindschakelaar is bereikt. Als nu de eindschakelaar van de <strong>H1MC</strong>-<strong>PI</strong> mastergeactiveerd is dan kunnen de overige <strong>H1MC</strong>-<strong>PI</strong> slaves bijgesteld worden zoalshierboven is beschreven. Anders moet de motor op de <strong>H1MC</strong>-<strong>PI</strong> slave waarvan nu deeindschakelaar geactiveerd is teruggestuurd te worden. Ga zo door totdat bij allemotoren de eindschakelaars geactiveerd zijn. Als een gewijzigde positie meer dan 1%afwijkt dan zal er een waarschuwing verschijnen op de Orion-MC, in dat geval dienen deeindschakelaars bijgesteld te worden.9 Druk op de knop “AUTO” om de eindpositie voor 'DICHT' in de <strong>H1MC</strong>-<strong>PI</strong> vast te leggen.De eindpositie wordt in het geheugen opgeslagen. Bij synchroon gekoppelde motorenworden de eindposities aan elkaar gelijkgesteld. De groene leds bij “OPEN” en “CLOSE”beginnen gelijktijdig te knipperen (handbediening ).Indien het inlezen van de positie afgekeurd is dan beginnen de leds bij “AUTO”, “OPEN”en “CLOSE” gelijktijdig te knipperen ( ).De volgende tabel geeft een overzicht van de betekenis van de status van een led tijdens hetinlezen.OPEN CLOSE AUTOOmschrijvingUIT UIT Inlezen van de eindpositie 'OPEN'.UIT UIT Inlezen van de eindpositie 'DICHT'UITHet inlezen is gereed, de motor is inhandmatig bedrijf.Eindposities zijn niet ingelezen. Hetinlezen is mogelijk afgekeurd. Zie ook demelding op de Orion-MC.Vergrendelen inleesprocedureDoor dipswitch 8 in de stand 'ON' te zetten wordt de inleesprocedurevergrendeld. Hiermee kan worden voorkomen dat tijdens normaal gebruikde inleesprocedure per ongeluk wordt opgestart.ON1 2 3 4 5 6 7 8Eindposities wijzigenTelkens als de eindstand wordt bereikt worden de eindposities opnieuw gesynchroniseerd. Doorde automatische eindstandsynchronisatie is het toegestaan om kleine wijzigingen aan tebrengen in de positie van de eindschakelaars tot maximaal 1%. Hierbij hoeven de eindpositiesniet opnieuw ingelezen te worden. Daarbij is het belangrijk om na het aanpassen van deeindschakelaars de motor tegen de eindschakelaars te sturen via de <strong>H1MC</strong>-<strong>PI</strong>. Bij het bereikenvan een eindschakelaar worden de eindposities automatisch aangepast.Als de encoderpositie in de eindstand meer dan 1% afwijkt van de inleespositiedan zal er via de Orion-MC een waarschuwing gegeven worden. Bij een afwijkinghoger dan 1,5% volgt er een alarm (zie ook hoofdstuk 7).18
11 ReparatieAlle instellingen en gegevens die voor de juiste werking van de <strong>H1MC</strong>-<strong>PI</strong> van belang zijnworden opgeslagen in een EEPROM. Moet om welke reden dan ook de hardware wordenvervangen dan kan de EEPROM overgezet worden waardoor het niet nodig is om de <strong>H1MC</strong>-<strong>PI</strong>opnieuw in te stellen. De positie van de motor mag dan niet gewijzigd zijn.Werkwijze- Schakel de voedingsspanning uit- Haal de EEPROM voorzichtig uit zijn voetje (zie de aansluitschema's voor de locatie).- Vervang de defecte hardware.- Zet de EEPROM in de nieuwe hardware. Zorg ervoor dat de inkeping aan de juiste zijde zit(zie de aansluitschema's).12 Aansluiten stand alone motorSluit de motor aan met behulp van een motorbeveiliging, motorschakelaar enomkeerschakelaar aan op magneetschakelaar voor de motor. Sluit de motor aan volgens degeldende normen en de aansluitinstructies van de motor.Sluit nooit de motor aan zonder een adequate motorbeveiliging.Wanneer bij het inlezen van de motorposities blijkt dat de draairichting van demotor niet correct is, dan kunt u twee fasen van de aansluitingen op demagneetschakelaar verwisselen.L1L2L3NMotorbeveiligingsschakelaarBreek- / motorbeveiliging<strong>H1MC</strong>-<strong>PI</strong>K1noodCON11 2 3 424V GND EMERGCON225 26 27 285 6 7 8H L BREAKALARMSYNCH L29 30 31 32 33 34 35 36 37 38CON339 40 41 42 43 449 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24GND GND24V LED FB 0..10 24 GND 0..5 GND ALARM JOGSP +24V GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.E COM ST OP CL JOGSPCON4K3dichtK2openK2openK3dicht24 VdcGNDK1K2openK3dicht24 Vac/dc0 Vac/dcU V WMDe gewenste draairichting van de motor wordt gegeven via de digitale uitgangen 'OPEN' en'DICHT'. Sluit deze uitgangen aan op de magneetschakelaars die de draairichting van de motorbepalen.Wanneer motorbeveiliging afvalt (bijvoorbeeld bij een thermische overbelasting), dan kan ditteruggekoppeld worden naar de digitale ingang 9.7. Zodra het signaal op de digitale ingangwegvalt (contact is verbroken), dan zal de <strong>H1MC</strong>-<strong>PI</strong> een alarm geven.Let op! Als deze functie niet wordt toegepast dan moet de digitale inganggeactiveerd zijn (contact is ingeschakeld). Verbind in dat geval de klemmen zoalsaangegeven in het bovenstaande schema.19
12.1 Tijdsturing bij stand-alone motorenTijdsturingTijdsturing werkt niet bij synchroon gekoppelde en frequentie gestuurdemotoren.Als een motor zonder frequentieregelaar wordt aangesloten kan tijdsturing worden toegepast. Indat geval hoeft er geen encoder te worden geïnstalleerd. Om tijdsturing te activeren dientdipswitch 6 in de stand ‘ON’ te worden gezet.ONON1 2 3 4 5 6 7 8Encoder1 2 3 4 5 6 7 8Tijdsturing13 Aansluiten frequentie gestuurde motorenSluit de netspanningingang van de frequentieregelaar aan op de magneetschakelaar voor demotor. Volgens de geldende normen en de aansluitinstructies van de frequentieregelaar.Sluit vervolgens de motor aan op de frequentieregelaar volgens de geldende normen en deaansluitinstructies van de motor en de frequentieregelaar.Het aansluiten van de stuursignalen die van en naar de frequentieregelaar gaan, staanhieronder beschreven.Wanneer bij het inlezen van de motorposities blijkt dat de draairichting van demotor niet correct is, dan kunt u twee fasen van de aansluitingen op demagneetschakelaar verwisselen.L1L2L3NMotorbeveiligingsschakelaar<strong>H1MC</strong>-<strong>PI</strong>K1noodCON11 2 3 424V GND EMERGCON225 26 27 285 6 7 8H L BREAKALARMSYNCH L29 30 31 32 33 34 35 36 37 38CON339 40 41 42 43 449 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24GND GND24V LED FB 0..10 24 GND 0..5 GND ALARM JOGSP +24V GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.E COM ST OP CL JOGSPCON424 VdcGNDComStartOpenCloseJogspFrequentie regelaarAlarmFrequentieregelaarSnelheidsbeveiligingK1U V WM24 Vac/dc0 Vac/dcFrequentieregelaar met open / dicht sturingDe frequentieregelaar ontvangt de stuursignalen via de digitale uitgangen open / dicht.Frequentieregelaar met start / reverse sturingHet startsignaal voor de motor wordt gegeven via de digitale uitgang 'START'. Sluit dezeuitgang aan op de digitale ingang van de frequentieregelaar waarmee de motor gestart wordt.20
De gewenste draairichting van de motor wordt gegeven via de digitale uitgangen 'OPEN' en'DICHT'.Bij een frequentieregelaar wordt de standaard draairichting van de motor omgekeerd door dedigitale ingang 'Reverse' hoog te maken. Voor het sturen van de frequentieregelaar hoeftdaarom slechts een van deze twee uitgangen gebruikt te worden.Indien de standaard draairichting van de motor hoort bij het <strong>H1MC</strong>-<strong>PI</strong> commando OPEN, danmoet de 'Reverse' ingang van de frequentieregelaar aangesloten worden op de digitale uitgang'DICHT'.Indien de standaard draairichting van de motor hoort bij het <strong>H1MC</strong>-<strong>PI</strong> commando DICHT, danmoet de 'Reverse' ingang van de frequentieregelaar aangesloten worden op de digitale uitgang'OPEN'.Terugkoppeling alarm frequentieregelaarWanneer de frequentieregelaar een alarm heeft (bijvoorbeeld een thermische overbelasting),dan kan dit teruggekoppeld worden naar de digitale ingang 'ALARM INPUT'. Zodra het signaalop de digitale ingang wegvalt (contact is verbroken), dan zal de <strong>H1MC</strong>-<strong>PI</strong> een alarm geven.Let op! Als deze functie niet CON4wordt toegepast dan moetde digitale ingang op CON439 40 43 44 41 42 43 4439 40 41 42 43 44geactiveerd zijn (contact isingeschakeld). Zie tekening19 20 21 22 23 24hierlangs.ALARM JOGSP +24V GNDCON4COM ST OP CL JOGSPSnelheidDe gewenste snelheid van de motor wordt geven door een digitaal of analoog signaal.Digitaal:Sluit de digitale uitgang 'JOGSP' aan op de digitale ingang 'Jog speed' van defrequentieregelaar, zie tekening op vorige pagina. Zodra de motor op hoge snelheid maglopen zal het contact gesloten worden. Hierdoor zal de frequentieregelaar de snelheid van demotor verhogen. Bij een open contact zal de frequentieregelaar op de basissnelheid draaien.Analoog:CON3Sluit de analoge uitgang '0..5' aan op de analogeingang van de frequentieregelaar. Het signaal37 38geeft aan hoe hoog de snelheid van de motor 29 30 31 32 33 34 35 36 37 38moet zijn.Deze aansturing wordt ingesteld viade Orion-MC. Lees hiervoor dehandleiding van de Orion-MC.SnelheidsbeveiligingAls het raam of scherm bijna in de eindpositie is dan zal de snelheid van de motor afnemen.Om dit systeem te bewaken kan een sensor in de installatie worden gemonteerd die het contactverbreekt als het raam of scherm bijna in de eindpositie is. Op het moment dat het contactverbreekt zal de snelheid van de motor verlaagd worden naar de basissnelheid. Sluit hetcontact aan op de digitale ingang 'JOGSP INPUT'Let op! Als deze functie niet wordt gebruikt dan moet de digitale ingang op CON4geactiveerd zijn (contact is ingeschakeld). Zie tekening hierboven.CON3Alarm9 10 11 12 13 14 15 16 17 1824V LED FB GND 0..10 GND 24V GND 0..5 GNDOP CL AU COM 24V SW.O 24V SW.C 24V SW.ESnelheidsbeveiligingSnelheidanaloog21
14 Service display, MCSDDe MCSD is een hulpkastje dat gebruikt kan worden tijdens installatie van de <strong>H1MC</strong>-<strong>PI</strong>.Motor12.20OPN 3FFFFFFACT 3FFFE7DCLS 3FFF462RT 119 SP 0.000 Geen alarmOK80HE14.1 AansluitenMCSD connectorVerbind de MCSD met de <strong>H1MC</strong>-<strong>PI</strong> met behulp van de MCSD connector. Zie ook hetaansluitschema op pagina 814.2 Gebruik van de MCSDNadat de MCSD is aangesloten en de <strong>H1MC</strong>-<strong>PI</strong> is ingeschakeld, zal eerst het opstartschermkortstondig worden weergegeven. Hierna verschijnt het scherm met de motorgegevens.BedieningsknoppenDe bedieningsknoppen hebben de volgende functies.Ga van 'Overzicht motor' naar'Overzicht eindschakelaars'.Ga van 'Overzicht eindschakelaars'naar 'Overzicht motor'. OKSuboverzicht van de motor. (Geenrelevante gegevens).Geen functie.Display 'Overzicht motor'1356810<strong>H1MC</strong>1.20OPN 3FFFFFFACTCLSRT3FFFE7D3FFF462119 SP 0.000 Geen alarm2479Display 'Overzicht eindschakelaars'121314<strong>H1MC</strong>OPNCLS1.20M 1 2 3 4 5 6 71122
BeschrijvingPos. Weergave Omschrijving1 <strong>H1MC</strong>-<strong>PI</strong> Type print2 1.20 Versie nummer van de software in de <strong>H1MC</strong>-<strong>PI</strong>3 OPN Ruwe waarde voor de eindpositie van de motor OPEN (waarde wordthexadecimaal weergegeven).4 / Status eindschakelaar OPEN= Verbroken (eindschakelaar is bereikt). = Gesloten5 ACT Ruwe waarde voor actuele positie van de motor (waarde wordt hexadecimaalweergegeven).6 CLS Ruwe waarde voor de eindpositie van de motor CLOSE (waarde wordthexadecimaal weergegeven).7 / Status eindschakelaar CLOSE (sluiten)= Verbroken (eindschakelaar is bereikt). = Gesloten8 RT Looptijd van de motor in seconde.9 SP Indicatie voor loopsnelheid van de motor (dit is de pulssnelheid van deencoder in Hz).10 0 Alarmcode + beschrijving alarmcode.11 M= master motor. 1, 2, 3, 4, 5, 6, 7 = slave motor12 / Status eindschakelaar van OPEN van de bovengenoemde motor.= Verbroken (eindschakelaar is bereikt). = Gesloten13 / Status eindschakelaar CLOSE (sluiten) van de bovengenoemde motor= Verbroken (eindschakelaar is bereikt). = Gesloten14 / Aan de hand van de status van de eindschakelaars kunt u zien of decommunicatie tussen de master en slaves aanwezig isVerklaring van de waardenOp het display kunt u het functioneren van de encoder aflezen. Zodra de motor loopt moet de actuele positie veranderen bij ACT. Gebeurt dit niet dankomen er geen pulsen binnen. Als de <strong>H1MC</strong>-<strong>PI</strong> correct is ingelezen dan beweegt de motor tussen de eindposities OPN(open) en CLS (dicht). Als de motor loopt, beweegt de actuele positie ACT tussen deze tweeposities. Als de motor in de eindpositie is (OPN/CLS) dan dient de bijbehorende eindschakelaarverbroken te zijn . Tijdens het lopen van de motor geeft de snelheidsindicator SP de pulsfrequentie van deencoder weer. Als de <strong>H1MC</strong>-<strong>PI</strong> een alarm geeft dan kan de reden hiervan teruggevonden worden op deonderste regel van het overzicht. Het 'Overzicht eindschakelaars' kunt u gebruiken tijden het inlezen. U hebt dan een overzichtvan de eindschakelaars van alle motoren.23
ALLE RECHTEN GERESERVEERD DOOR HOTRACO INDUSTRIAL BV. DEZE TEKENING MAG IN GEEN ENKELE VORM GEKO<strong>PI</strong>EERD WORDEN OF AAN DERDEN TER INZAGE WORDEN GEGEVEN ZONDER SCHRIFTELIJKE TOESTEMMING VAN HOTRACO INDUSTRIAL BV.1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20////L1L2L3NL1L2L3NQ123I> I> I>4561314/200.3K1/200.5NOOD123456K2/200.11OPEN123456K3/200.12DICHT123456X 1 2 3 PEW1MU1 V1 W1 PEM3RAAM- OF SCHERMSTURINGCONVENTIONEELINTERN DATUM NAAM DATUM NAAM + CONVRAAM EN SCHERMSTURINGPAGINABESCHRIJVING 1-3-2010 HIZREVISIEHOOFDSTROOMTEKENING NUMMER098.10.P0010++===BLVAN2001006
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20// 24VDC24VAC/DC/ 0VAC/DC/ 0VDC<strong>H1MC</strong>-<strong>PI</strong>Q/100.41 224VDCBREAK27 281314EMERG3 4K1NOOD<strong>H1MC</strong>-<strong>PI</strong>A1A2COMNOOD-UITTHERMISCH OPEN DICHTNO/100.4/100.4/100.5NCOPCL19 20 21 22 23 24K3/200.12DICHTK2OPENNO/100.4/100.4/100.51112A1A2NCK2/200.11OPENK3DICHTNO1112A1A2NC/200.12/100.6/200.11/100.6/100.724VADC24VAC/DC0VAC/DC0VDCRAAM- OF SCHERMSTURINGCONVENTIONEELALLE RECHTEN GERESERVEERD DOOR HOTRACO INDUSTRIAL BV. DEZE TEKENING MAG IN GEEN ENKELE VORM GEKO<strong>PI</strong>EERD WORDEN OF AAN DERDEN TER INZAGE WORDEN GEGEVEN ZONDER SCHRIFTELIJKE TOESTEMMING VAN HOTRACO INDUSTRIAL BV.100INTERN PAGINABESCHRIJVINGDATUM 1-3-2010 NAAM HIZREVISIE DATUM NAAM + CONVRAAM EN SCHERMSTURINGSTUURSTROOMTEKENING NUMMER++=098.10.P0010==BLVAN+FREQ/1002006
ALLE RECHTEN GERESERVEERD DOOR HOTRACO INDUSTRIAL BV. DEZE TEKENING MAG IN GEEN ENKELE VORM GEKO<strong>PI</strong>EERD WORDEN OF AAN DERDEN TER INZAGE WORDEN GEGEVEN ZONDER SCHRIFTELIJKE TOESTEMMING VAN HOTRACO INDUSTRIAL BV.1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20////L1L2L3NL1L2L3NF1 3 5246K1/200.5NOOD123456X 1 2 3 PEW1FREQ/200.8 L1 L2 L3 PEU V W PEMU1 V1 W1 PEM3RAAM- OF SCHERMSTURINGFREQUENTIEREGELAAR+CONV/200INTERN DATUM NAAM DATUM NAAM + FREQRAAM EN SCHERMSTURINGPAGINABESCHRIJVING 1-3-2010 HIZREVISIEHOOFDSTROOMTEKENING NUMMER098.10.P0010++===BLVAN2001006
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20/ 24VDC/ 24VAC/DC/ 0VAC/DC/ 0VDC<strong>H1MC</strong>-<strong>PI</strong>1 224VDCEMERG3 4K1NOOD<strong>H1MC</strong>-<strong>PI</strong>NOODNO/100.4/100.4/100.5A1A2NCFREQ/100.3COMCOMSTARTSTARTOPOPCLCL19 20 21 22 23 24START-INGANG KAN GEBRUIKT WORDEN INDIENHIERVOOR EEN VOORZIENING OP DE FREQUENTIEREGELAARAANWEZIG IS EN DEZE HET AANLOPEN VANDE AANDRIJVING NIET VERTRAAGT.JOGJOGALARMALARM39 40 43 4424VADC24VAC/DC0VAC/DC0VDCRAAM- OF SCHERMSTURINGFREQUENTIEREGELAARALLE RECHTEN GERESERVEERD DOOR HOTRACO INDUSTRIAL BV. DEZE TEKENING MAG IN GEEN ENKELE VORM GEKO<strong>PI</strong>EERD WORDEN OF AAN DERDEN TER INZAGE WORDEN GEGEVEN ZONDER SCHRIFTELIJKE TOESTEMMING VAN HOTRACO INDUSTRIAL BV.100INTERN PAGINABESCHRIJVINGDATUM 1-3-2010 NAAM HIZREVISIE DATUM NAAM + FREQRAAM EN SCHERMSTURINGSTUURSTROOMTEKENING NUMMER++=098.10.P0010==BLVAN+MU-1/1002006
ALLE RECHTEN GERESERVEERD DOOR HOTRACO INDUSTRIAL BV. DEZE TEKENING MAG IN GEEN ENKELE VORM GEKO<strong>PI</strong>EERD WORDEN OF AAN DERDEN TER INZAGE WORDEN GEGEVEN ZONDER SCHRIFTELIJKE TOESTEMMING VAN HOTRACO INDUSTRIAL BV.1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20////L1L2L3NL1L2L3NQ123I> I> I>4561314/200.3MU-1/200.4 L1 L2 L3MU-1U V WX 1 2 3 PEW1MU1 V1 W1 PEM3RAAM- OF SCHERMSTURINGMU-1+FREQ/200INTERN DATUM NAAM DATUM NAAM + MU-1RAAM EN SCHERMSTURINGPAGINABESCHRIJVING 1-3-2010 HIZREVISIEHOOFDSTROOMTEKENING NUMMER098.10.P0010++===BLVAN2001006
ALLE RECHTEN GERESERVEERD DOOR HOTRACO INDUSTRIAL BV. DEZE TEKENING MAG IN GEEN ENKELE VORM GEKO<strong>PI</strong>EERD WORDEN OF AAN DERDEN TER INZAGE WORDEN GEGEVEN ZONDER SCHRIFTELIJKE TOESTEMMING VAN HOTRACO INDUSTRIAL BV.1001 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20/24VDC24VDC<strong>H1MC</strong>-<strong>PI</strong>1 224VDC<strong>H1MC</strong>-<strong>PI</strong>EMERGOPCLEMCOMCOMOPCLALARM39 433 419 20 21 22 23 24Q/100.41314MU-1/100.3 1 2 3 4 5COMMU-1/0VDC0VDCRAAM- OF SCHERMSTURINGMU-1INTERN DATUM NAAM DATUM NAAM + MU-1RAAM EN SCHERMSTURINGPAGINABESCHRIJVING 1-3-2010 HIZREVISIESTUURSTROOMTEKENING NUMMER++=BL6098.10.P0010==VAN200