
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Projeto Reenge - Eng. Elétrica<br />
Apostila de Sistemas de Controle I<br />
Prof. Hélio Leães Hey - 1997<br />
ω > ω → = − ⎜ ⎟<br />
⎝ω<br />
⎠<br />
+<br />
ω<br />
ω<br />
⎛ ⎞<br />
⎛ ⎞<br />
n dB 20.log ⎜ ⎟ → dB = −20.log<br />
⎜ ⎟<br />
n ⎝ n⎠<br />
⎝ n⎠<br />
dB = −40.log n<br />
ω<br />
ω<br />
Fase:<br />
− tg<br />
−1<br />
2ζ<br />
ω ω<br />
n<br />
2<br />
( )<br />
1−<br />
ω<br />
ω<br />
n<br />
4 2 2<br />
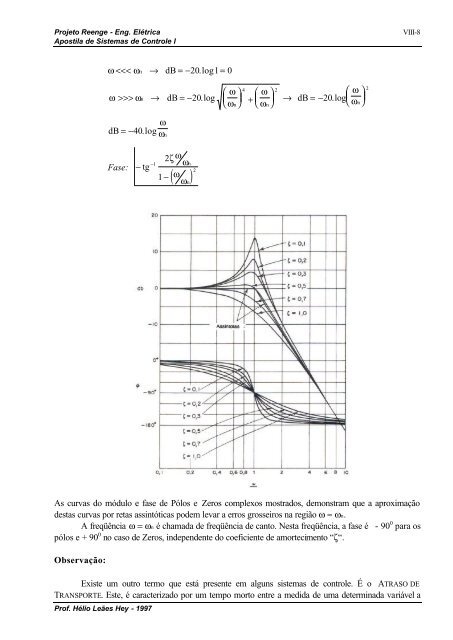
As curvas do módulo e fase de Pólos e Zeros complexos mostrados, demonstram que a aproximação<br />
destas curvas por retas assintóticas podem levar a erros grosseiros na região ω ≈ ωn.<br />
A freqüência ω = ωn é chamada de freqüência de canto. Nesta freqüência, a fase é - 90 0 para os<br />
pólos e + 90 0 no caso de Zeros, independente do coeficiente de amortecimento “ζ“.<br />
Observação:<br />
Existe um outro termo que está presente em alguns sistemas de controle. É o ATRASO DE<br />
TRANSPORTE. Este, é caracterizado por um tempo morto entre a medida de uma determinada variável a<br />
VIII-8