Eletromecânica - Parker
Eletromecânica - Parker
Eletromecânica - Parker

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
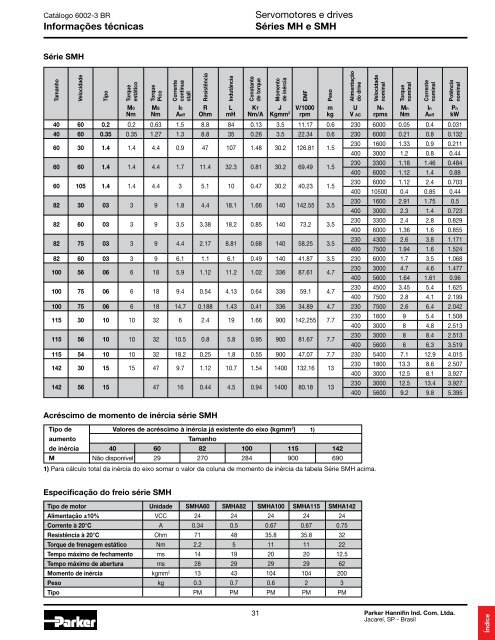
Catálogo 6002-3 BR<br />
Informações técnicas<br />
Série SMH<br />
Tamanho<br />
Torque<br />
estático<br />
M0<br />
Nm<br />
Torque<br />
Pico<br />
MS<br />
Nm<br />
Especificação do freio série SMH<br />
Corrente<br />
contínua<br />
stall<br />
I0<br />
Aeff<br />
Resistência<br />
R<br />
Ohm<br />
Indutância<br />
L<br />
mH<br />
Constante<br />
de torque<br />
Servomotores e drives<br />
Séries MH e SMH<br />
KT<br />
Nm/A<br />
31<br />
J<br />
Kgmm 2<br />
40 60 0.2 0.2 0.63 1.5 8.8 84 0.13 3.5 11.17 0.6 230 6000 0.05 0.4 0.031<br />
40 60 0.35 0.35 1.27 1.3 8.8 35 0.26 3.5 22.34 0.6 230 6000 0.21 0.8 0.132<br />
60 30 1.4<br />
60 60 1.4<br />
60 105 1.4<br />
82 30 03<br />
82 60 03<br />
Momento<br />
de inércia<br />
EMF<br />
V/1000<br />
rpm<br />
1.4 4.4 0.9 47 107 1.48 30.2 126.81 1.5<br />
1.4 4.4 1.7 11.4 32.3 0.81 30.2 69.49 1.5<br />
1.4 4.4 3 5.1 10 0.47 30.2 40.23<br />
3 9 1.8 4.4 18.1 1.66 140 142.55 3.5<br />
3 9 3.5 3.38 18.2 0.85 140 73.2 3.5<br />
82 75 03 3 9 4.4 2.17 8.81 0.68 140 58.25 3.5<br />
Tipo de motor Unidade SMHA60 SMHA82 SMHA100 SMHA115 SMHA142<br />
Alimentação ±10% VCC 24 24 24 24 24<br />
Corrente à 20°C A 0.34 0.5 0.67 0.67 0.75<br />
Resistência à 20°C Ohm 71 48 35.8 35.8 32<br />
Torque de frenagem estático Nm 2.2 5 11 11 22<br />
Tempo máximo de fechamento ms 14 19 20 20 12.5<br />
Tempo máximo de abertura ms 28 29 29 29 62<br />
Momento de inércia kgmm 2 13 43 104 104 200<br />
Peso kg 0.3 0.7 0.6 2 3<br />
Tipo PM PM PM PM PM<br />
Peso<br />
m<br />
kg<br />
1.5<br />
U<br />
V AC<br />
Velocidade<br />
nominal<br />
Nn<br />
rpms<br />
Torque<br />
nominal<br />
Mn<br />
Nm<br />
Corrente<br />
nominal<br />
In<br />
Aeff<br />
Potência<br />
nominal<br />
Pn<br />
kw<br />
230 1600 1.33 0.9 0.211<br />
400 3000 1.2 0.8 0.44<br />
230 3300 1.18 1.46 0.484<br />
400 6000 1.12 1.4 0.88<br />
230 6000 1.12 2.4 0.703<br />
400 10500 0.4 0.85 0.44<br />
230 1600 2.91 1.75 0.5<br />
400 3000 2.3 1.4 0.723<br />
230 3300 2.4 2.8 0.829<br />
400 6000 1.36 1.6 0.855<br />
230 4300 2.6 3.8 1.171<br />
400 7500 1.94 1.6 1.524<br />
82 60 03 3 9 6.1 1.1 6.1 0.49 140 41.87 3.5 230 6000 1.7 3.5 1.068<br />
100 56 06 6 18 5.9 1.12 11.2 1.02 336 87.61 4.7 230 3000 4.7 4.6 1.477<br />
400 5600 1.64 1.61 0.96<br />
100<br />
75<br />
06<br />
6 18 9.4 0.54 4.13 0.64 336 59.1 4.7<br />
230 4500 3.45 5.4 1.625<br />
400 7500 2.8 4.1 2.199<br />
100 75 06 6 18 14.7 0.188 1.43 0.41 336 34.89 4.7 230 7500 2.6 6.4 2.042<br />
115<br />
115<br />
30<br />
56<br />
10<br />
10<br />
10 32 6 2.4 19 1.66 900 142.255 7.7<br />
10 32 10.5 0.8 5.8 0.95 900 81.67 7.7<br />
230 1600 9 5.4 1.508<br />
400 3000 8 4.8 2.513<br />
230 3000 8 8.4 2.513<br />
400 5600 6 6.3 3.519<br />
115 54 10 10 32 18.2 0.25 1.8 0.55 900 47.07 7.7 230 5400 7.1 12.9 4.015<br />
142<br />
142<br />
Velocidade<br />
30<br />
56<br />
Tipo<br />
15<br />
15<br />
15 47 9.7 1.12 10.7 1.54 1400 132.16 13<br />
Acréscimo de momento de inércia série SMH<br />
47 16 0.44 4.5 0.94 1400 80.18 13<br />
Tipo de Valores de acréscimo à inércia já existente do eixo (kgmm 2 ) 1)<br />
aumento Tamanho<br />
de inércia 40 60 82 100 115 142<br />
M Não disponível 29 270 284 900 690<br />
1) Para cálculo total da inércia do eixo somar o valor da coluna de momento de inércia da tabela Série SMH acima.<br />
Alimentação<br />
do drive<br />
230 1800 13.3 8.6 2.507<br />
400 3000 12.5 8.1 3.927<br />
230 3000 12.5 13.4 3.927<br />
400 5600 9.2 9.8 5.395<br />
<strong>Parker</strong> Hannifin Ind. Com. Ltda.<br />
Jacareí, SP - Brasil<br />
Índice