Eletromecânica - Parker
Eletromecânica - Parker
Eletromecânica - Parker

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Índice<br />
Catálogo 6002-3 BR<br />
Informações técnicas<br />
Informações gerais<br />
Controladores multieixo<br />
Série ACR<br />
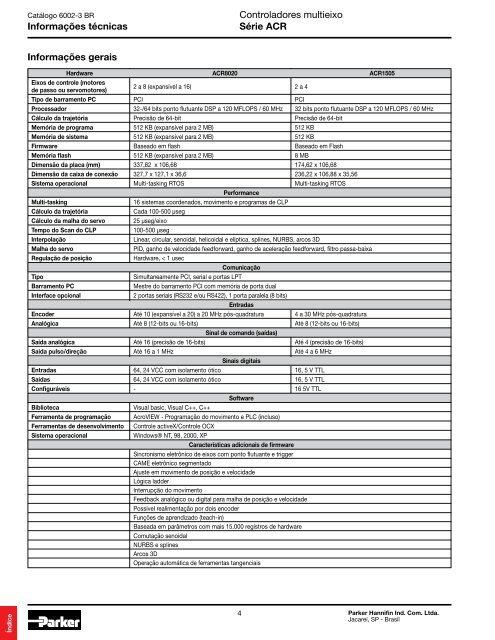
Hardware ACR8020 ACR1505<br />
Eixos de controle (motores<br />
de passo ou servomotores)<br />
2 a 8 (expansível a 16) 2 a 4<br />
Tipo de barramento PC PCI PCI<br />
Processador 32-/64 bits ponto flutuante DSP a 120 MFLOPS / 60 MHz 32 bits ponto flutuante DSP a 120 MFLOPS / 60 MHz<br />
Cálculo da trajetória Precisão de 64-bit Precisão de 64-bit<br />
Memória de programa 512 KB (expansível para 2 MB) 512 KB<br />
Memória de sistema 512 KB (expansível para 2 MB) 512 KB<br />
Firmware Baseado em flash Baseado em Flash<br />
Memória flash 512 KB (expansível para 2 MB) 8 MB<br />
Dimensão da placa (mm) 337,82 x 106,68 174,62 x 106,68<br />
Dimensão da caixa de conexão 327,7 x 127,1 x 36,6 236,22 x 106,88 x 35,56<br />
Sistema operacional Multi-tasking RTOS<br />
Performance<br />
Multi-tasking RTOS<br />
Multi-tasking 16 sistemas coordenados, movimento e programas de CLP<br />
Cálculo da trajetória Cada 100-500 µseg<br />
Cálculo da malha do servo 25 µseg/eixo<br />
Tempo do Scan do CLP 100-500 µseg<br />
Interpolação Linear, circular, senoidal, helicoidal e elíptica, splines, NURBS, arcos 3D<br />
Malha do servo PID, ganho de velocidade feedforward, ganho de aceleração feedforward, filtro passa-baixa<br />
Regulação de posição Hardware, < 1 usec<br />
Comunicação<br />
Tipo Simultaneamente PCI, serial e portas LPT<br />
Barramento PC Mestre do barramento PCI com memória de porta dual<br />
Interface opcional 2 portas seriais (RS232 e/ou RS422), 1 porta paralela (8 bits)<br />
Entradas<br />
Encoder Até 10 (expansível a 20) a 20 MHz pós-quadratura 4 a 30 MHz pós-quadratura<br />
Analógica Até 8 (12-bits ou 16-bits)<br />
Sinal de comando (saídas)<br />
Até 8 (12-bits ou 16-bits)<br />
Saída analógica Até 16 (precisão de 16-bits) Até 4 (precisão de 16-bits)<br />
Saída pulso/direção Até 16 a 1 MHz<br />
Sinais digitais<br />
Até 4 a 6 MHz<br />
Entradas 64, 24 VCC com isolamento ótico 16, 5 V TTL<br />
Saídas 64, 24 VCC com isolamento ótico 16, 5 V TTL<br />
Configuráveis -<br />
Software<br />
16 5V TTL<br />
Biblioteca Visual basic, Visual C++, C++<br />
Ferramenta de programação AcroVIEW - Programação do movimento e PLC (incluso)<br />
Ferramentas de desenvolvimento Controle activeX/Controle OCX<br />
Sistema operacional Windows® NT, 98, 2000, XP<br />
Características adicionais de firmware<br />
Sincronismo eletrônico de eixos com ponto flutuante e trigger<br />
CAME eletrônico segmentado<br />
Ajuste em movimento de posição e velocidade<br />
Lógica ladder<br />
Interrupção do movimento<br />
Feedback analógico ou digital para malha de posição e velocidade<br />
Possível realimentação por dois encoder<br />
Funções de aprendizado (teach-in)<br />
Baseada em parâmetros com mais 15.000 registros de hardware<br />
Comutação senoidal<br />
NURBS e splines<br />
Arcos 3D<br />
Operação automática de ferramentas tangenciais<br />
4<br />
<strong>Parker</strong> Hannifin Ind. Com. Ltda.<br />
Jacareí, SP - Brasil