Technomarket Industrie nr. 1

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ma¿ini unelte<br />
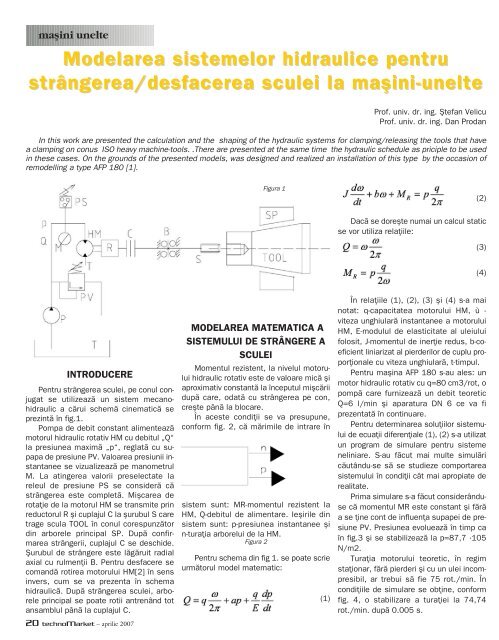
Modelarea sistemelor hidraulice pentru<br />
strângerea/desfacerea sculei la ma¿ini-unelte<br />
Prof. univ. dr. ing. ªtefan Velicu<br />
Prof. univ. dr. ing. Dan Prodan<br />
In this work are presented the calculation and the shaping of the hydraulic systems for clamping/releasing the tools that have<br />
a clamping on conus ISO heavy machine-tools. .There are presented at the same time the hydraulic schedule as priciple to be used<br />
in these cases. On the grounds of the presented models, was designed and realized an installation of this type by the occasion of<br />
remodelling a type AFP 180 [1].<br />
Figura 1<br />
(2)<br />
Dacå se dore¿te numai un calcul static<br />
se vor utiliza rela¡iile:<br />
(3)<br />
(4)<br />
INTRODUCERE<br />
Pentru strângerea sculei, pe conul conjugat<br />
se utilizeazå un sistem mecanohidraulic<br />
a cårui schemå cinematicå se<br />
prezintå în fig.1.<br />
Pompa de debit constant alimenteazå<br />
motorul hidraulic rotativ HM cu debitul „Q“<br />
la presiunea maximå „p“, reglatå cu supapa<br />
de presiune PV. Valoarea presiunii instantanee<br />
se vizualizeazå pe manometrul<br />
M. La atingerea valorii preselectate la<br />
releul de presiune PS se considerå cå<br />
strângerea este completå. Mi¿carea de<br />
rota¡ie de la motorul HM se transmite prin<br />
reductorul R ¿i cuplajul C la ¿urubul S care<br />
trage scula TOOL în conul corespunzåtor<br />
din arborele principal SP. Dupå confirmarea<br />
strângerii, cuplajul C se deschide.<br />
ªurubul de strângere este lågåruit radial<br />
axial cu rulmen¡ii B. Pentru desfacere se<br />
comandå rotirea motorului HM[2] în sens<br />
invers, cum se va prezenta în schema<br />
hidraulicå. Dupå strângerea sculei, arborele<br />
principal se poate rotii antrenând tot<br />
ansamblul pânå la cuplajul C.<br />
20 technomarket – aprilie 2007<br />
MODELAREA MATEMATICÅ A<br />
SISTEMULUI DE STRÂNGERE A<br />
SCULEI<br />
Momentul rezistent, la nivelul motorului<br />
hidraulic rotativ este de valoare micå ¿i<br />
aproximativ constantå la începutul mi¿cårii<br />
dupå care, odatå cu strângerea pe con,<br />
cre¿te pânå la blocare.<br />
În aceste condi¡ii se va presupune,<br />
conform fig. 2, cå mårimile de intrare în<br />
sistem sunt: MR-momentul rezistent la<br />
HM, Q-debitul de alimentare. Ie¿irile din<br />
sistem sunt: p-presiunea instantanee ¿i<br />
n-tura¡ia arborelui de la HM.<br />
Figura 2<br />
Pentru schema din fig 1. se poate scrie<br />
urmåtorul model matematic:<br />
(1)<br />
În rela¡iile (1), (2), (3) ¿i (4) s-a mai<br />
notat: q-capacitatea motorului HM, ù -<br />
viteza unghiularå instantanee a motorului<br />
HM, E-modulul de elasticitate al uleiului<br />
folosit, J-momentul de iner¡ie redus, b-coeficient<br />
liniarizat al pierderilor de cuplu propor¡ionale<br />
cu viteza unghiularå, t-timpul.<br />
Pentru ma¿ina AFP 180 s-au ales: un<br />
motor hidraulic rotativ cu q=80 cm3/rot, o<br />
pompå care furnizeazå un debit teoretic<br />
Q=6 l/min ¿i aparatura DN 6 ce va fi<br />
prezentatå în continuare.<br />
Pentru determinarea solu¡iilor sistemului<br />
de ecua¡ii diferen¡iale (1), (2) s-a utilizat<br />
un program de simulare pentru sisteme<br />
neliniare. S-au fåcut mai multe simulåri<br />
cåutându-se så se studieze comportarea<br />
sistemului în condi¡ii cât mai apropiate de<br />
realitate.<br />
Prima simulare s-a fåcut considerânduse<br />
cå momentul MR este constant ¿i fårå<br />
a se ¡ine cont de influen¡a supapei de presiune<br />
PV. Presiunea evolueazå în timp ca<br />
în fig.3 ¿i se stabilizeazå la p=87,7 ·105<br />
N/m2.<br />
Tura¡ia motorului teoretic, în regim<br />
sta¡ionar, fårå pierderi ¿i cu un ulei incompresibil,<br />
ar trebui så fie 75 rot./min. În<br />
condi¡iile de simulare se ob¡ine, conform<br />
fig. 4, o stabilizare a tura¡iei la 74,74<br />
rot./min. dupå 0.005 s.