

Bilgisayarla Görü İle Deney Hayvanlarında Dönme Hareketi Takibi ...
Bilgisayarla Görü İle Deney Hayvanlarında Dönme Hareketi Takibi ...
Bilgisayarla Görü İle Deney Hayvanlarında Dönme Hareketi Takibi ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
(a) (b)<br />
Şekil 13. a) J m_s , b) J Öklid imgeleri.<br />
Örnek imge için elde edilen J m_s ikili imgesine ait Öklid<br />
uzaklığı ( J Öklid ) Şekil 13’de görülmektedir.<br />
Elde edilen J Öklid imgesinde, uzaklık değerlerinin en<br />
büyük değerinin %75’inden büyük olan pikseller Radon<br />
dönüşümüne [9] sokulmaktadır. Elde edilen Radon dönüşümü<br />
matrisinde en büyük genliğin sahip olduğu açı değeri deney<br />
hayvanının doğrultusunu vermektedir. Radon dönüşümünde<br />
hız gereksiniminden dolayı 0 ° ile 179 ° arasındaki tüm tam sayı<br />
dereceler yerine sadece 20 °’ lik açı aralıkları alınmaktadır.<br />
Bunun sonucunda deney hayvanının doğrultusunda 20 ° ’lik bir<br />
nicemleme hatası oluşmaktadır. Fakat bu hata hem birikimli<br />
olmadığından hem de görsel olarak fark edilemeyeceğinden<br />
sorun yaratmamakta, sistemin gerçek zamanlı çalışma<br />
gereksinimini karşılaması açısından da avantaj sağlamaktadır.<br />
Örnek J Öklid imgesi için, Radon dönüşümü sonrasında elde<br />
edilen Radon dönüşüm matrisi ( J Radon ) ve deney hayvanının<br />
bulunan doğrultusu Şekil 14’de görülmektedir.<br />
Şekil 14. a) Radon<br />
(a) (b)<br />
J , b) deney hayvanının bulunan doğrultusu.<br />
2.2. <strong>Deney</strong> Hayvanının Dönüş Durumunun Belirlenmesi<br />
İmge çerçevesi için elde edilen deney hayvanına ait<br />
doğrultu bilgisi, önceki doğrultu bilgileri ile birlikte<br />
değerlendirilerek deney hayvanının dönüş durumuna ait<br />
gerekli bilgiler ortaya çıkarılmaktadır. Bu amaçla ilk olarak<br />
deney hayvanının doğrultusunun alabileceği tüm durumları<br />
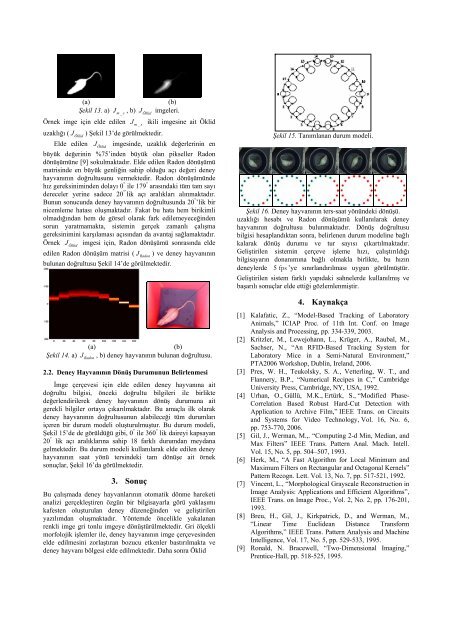
içeren bir durum modeli oluşturulmuştur. Bu durum modeli,<br />
Şekil 15’de de görüldüğü gibi, 0 ° ile 360 ° lik daireyi kapsayan<br />
20 ° lik açı aralıklarına sahip 18 farklı durumdan meydana<br />
gelmektedir. Bu durum modeli kullanılarak elde edilen deney<br />
hayvanının saat yönü tersindeki tam dönüşe ait örnek<br />
sonuçlar, Şekil 16’da görülmektedir.<br />
3. Sonuç<br />
Bu çalışmada deney hayvanlarının otomatik dönme hareketi<br />
analizi gerçekleştiren özgün bir bilgisayarla görü yaklaşımı<br />
kafesten oluşturulan deney düzeneğinden ve geliştirilen<br />
yazılımdan oluşmaktadır. Yöntemde öncelikle yakalanan<br />
renkli imge gri tonlu imgeye dönüştürülmektedir. Gri ölçekli<br />
morfolojik işlemler ile, deney hayvanının imge çerçevesinden<br />
elde edilmesini zorlaştıran bozucu etkenler bastırılmakta ve<br />
deney hayvanı bölgesi elde edilmektedir. Daha sonra Öklid<br />
Şekil 15. Tanımlanan durum modeli.<br />
Şekil 16. <strong>Deney</strong> hayvanının ters-saat yönündeki dönüşü.<br />
uzaklığı hesabı ve Radon dönüşümü kullanılarak deney<br />
hayvanının doğrultusu bulunmaktadır. Dönüş doğrultusu<br />
bilgisi hesaplandıktan sonra, belirlenen durum modeline bağlı<br />
kalarak dönüş durumu ve tur sayısı çıkartılmaktadır.<br />
Geliştirilen sistemin çerçeve işleme hızı, çalıştırıldığı<br />
bilgisayarın donanımına bağlı olmakla birlikte, bu hızın<br />
deneylerde 5 fps ’ye sınırlandırılması uygun görülmüştür.<br />
Geliştirilen sistem farklı yapıdaki sahnelerde kullanılmış ve<br />
başarılı sonuçlar elde ettiği gözlemlenmiştir.<br />
4. Kaynakça<br />
[1] Kalafatic, Z., “Model-Based Tracking of Laboratory<br />
Animals,” ICIAP Proc. of 11th Int. Conf. on Image<br />
Analysis and Processing, pp. 334-339, 2003.<br />
[2] Kritzler, M., Lewejohann, L., Krüger, A., Raubal, M.,<br />
Sachser, N., “An RFID-Based Tracking System for<br />
Laboratory Mice in a Semi-Natural Environment,”<br />
PTA2006 Workshop, Dublin, Ireland, 2006.<br />
[3] Pres, W. H., Teukolsky, S. A., Vetterling, W. T., and<br />
Flannery, B.P., “Numerical Recipes in C,” Cambridge<br />
University Press, Cambridge, NY, USA, 1992.<br />
[4] Urhan, O., Güllü, M.K., Ertürk, S., “Modified Phase-<br />
Correlation Based Robust Hard-Cut Detection with<br />
Application to Archive Film,” IEEE Trans. on Circuits<br />
and Systems for Video Technology, Vol. 16, No. 6,<br />
pp. 753-770, 2006.<br />
[5] Gil, J., Werman, M.,. “Computing 2-d Min, Median, and<br />
Max Filters” IEEE Trans. Pattern Anal. Mach. Intell.<br />
Vol. 15, No. 5, pp. 504–507, 1993.<br />
[6] Herk, M., “A Fast Algorithm for Local Minimum and<br />
Maximum Filters on Rectangular and Octagonal Kernels”<br />
Pattern Recogn. Lett. Vol. 13, No. 7, pp. 517-521, 1992.<br />
[7] Vincent, L., “Morphological Grayscale Reconstruction in<br />
Image Analysis: Applications and Efficient Algorithms”,<br />
IEEE Trans. on Image Proc., Vol. 2, No. 2, pp. 176-201,<br />
1993.<br />
[8] Breu, H., Gil, J., Kirkpatrick, D., and Werman, M.,<br />
“Linear Time Euclidean Distance Transform<br />
Algorithms,” IEEE Trans. Pattern Analysis and Machine<br />
Intelligence, Vol. 17, No. 5, pp. 529-533, 1995.<br />
[9] Ronald, N. Bracewell, “Two-Dimensional Imaging,”<br />
Prentice-Hall, pp. 518-525, 1995.


![Page 1 %XODQÕN 6 ]JHo LOH *|U QW 6WDELOL]DV\RQX M ...](https://img.yumpu.com/18085529/1/184x260/page-1-xodqon-6-jho-loh-u-qw-6wdeloldvrqx-m-.jpg?quality=85)




![[ ]T [ ]T - KULIS - Kocaeli Üniversitesi](https://img.yumpu.com/18085463/1/184x260/-t-t-kulis-kocaeli-universitesi.jpg?quality=85)






