

Görüntüleme Sonarı İle Yakalanan Görüntülerde Bulanık Mantık ...
Görüntüleme Sonarı İle Yakalanan Görüntülerde Bulanık Mantık ...
Görüntüleme Sonarı İle Yakalanan Görüntülerde Bulanık Mantık ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2011 IEEE 19th Signal Processing and Communications Applications Conference (SIU 2011)<br />
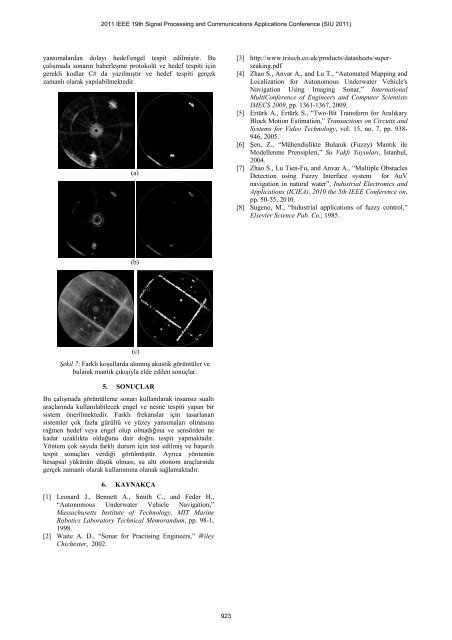
yansımalardan dolayı hedef/engel tespiit<br />
edilmiştir. Bu<br />
çalışmada sonarın haberleşme protokolü vee<br />
hedef tespiti için<br />
gerekli kodlar C# da yazılmıştır ve heddef<br />
tespiti gerçek<br />
zamanlı olarak yapılabilmektedir.<br />
(a)<br />
(b)<br />
(c)<br />
Şekil 7: Farklı koşullarda alınmış akusstik<br />
görüntüler ve<br />
bulanık mantık çıkışıyla elde edillen<br />
sonuçlar.<br />
5. SONUÇLAR<br />
Bu çalışmada görüntüleme sonarı kullanılaarak<br />
insansız sualtı<br />
araçlarında kullanılabilecek engel ve nesnee<br />
tespiti yapan bir<br />
sistem önerilmektedir. Farklı frekanslarr<br />
için tasarlanan<br />
sistemler çok fazla gürültü ve yüzey yannsımaları<br />
olmasına<br />
rağmen hedef veya engel olup olmadığınaa<br />
ve sensörden ne<br />
kadar uzaklıkta olduğuna dair doğru teespit<br />
yapmaktadır.<br />
Yöntem çok sayıda farklı durum için test eedilmiş<br />
ve başarılı<br />
tespit sonuçları verdiği görülmüştür. AAyrıca<br />
yöntemin<br />
hesapsal yükünün düşük olması, su altı ottonom<br />
araçlarında<br />
gerçek zamanlı olarak kullanımına olanak saağlamaktadır.<br />
6. KAYNAKÇA<br />
[1] Leonard J., Bennett A., Smith C. , and Feder H.,<br />
“Autonomous Underwater Vehiccle<br />
Navigation,”<br />
Massachusetts Institute of Technoloogy,<br />
MIT Marine<br />
Robotics Laboratory Technical Memorrandum,<br />
pp. 98-1,<br />
1998.<br />
[2] Waite A. D., “Sonar for Practising EEngineers,”<br />
Wiley<br />
Chichester, 2002.<br />
923<br />
[3] http://www.tritech.co.uk/prooducts/datasheets/super-<br />
seaking.pdf<br />
[4] Zhao S., Anvar A., and Lu TT.,<br />
“Automated Mapping and<br />
Localization for Autonommous<br />
Underwater Vehicle's<br />
Navigation Using Imagiing<br />
Sonar,” International<br />
MultiConference of Engineeers<br />
and Computer Scientists<br />
IMECS 2009, pp. 1361-13677,<br />
2009.<br />
[5] Ertürk A., Ertürk S., “Two--Bit<br />
Transform for Aralıkary<br />
Block Motion Estimation,” Transactions on Circuits and<br />
Systems for Video Technoloogy,<br />
vol. 15, no. 7, pp. 938-<br />
946, 2005.<br />
[6] Şen, Z., “Mühendislikte B<strong>Bulanık</strong><br />
(Fuzzy) <strong>Mantık</strong> ile<br />
Modellenme Prensipleri,” SSu<br />
Vakfı Yayınları, İstanbul,<br />
2004.<br />
[7] Zhao S., Lu Tien-Fu, and AAnvar<br />
A., “Multiple Obstacles<br />
Detection using Fuzzy Innterface<br />
system for AuV<br />
navigation in natural water” ”, Industrial Electronics and<br />
Applications (ICIEA), 2010 the 5th IEEE Conference on,<br />
pp. 50-55, 2010.<br />
[8] Sugeno, M., “Industrial appplications<br />
of fuzzy control,”<br />
Elsevier Science Pub. Co., 11985.


![Page 1 %XODQÕN 6 ]JHo LOH *|U QW 6WDELOL]DV\RQX M ...](https://img.yumpu.com/18085529/1/184x260/page-1-xodqon-6-jho-loh-u-qw-6wdeloldvrqx-m-.jpg?quality=85)



![[ ]T [ ]T - KULIS - Kocaeli Üniversitesi](https://img.yumpu.com/18085463/1/184x260/-t-t-kulis-kocaeli-universitesi.jpg?quality=85)






