Równania dynamiczne - Akademia Morska w Gdyni
Równania dynamiczne - Akademia Morska w Gdyni
Równania dynamiczne - Akademia Morska w Gdyni

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Akademia</strong> <strong>Morska</strong> w <strong>Gdyni</strong><br />
Katedra Automatyki Okrętowej<br />
Teoria sterowania<br />
<strong>Równania</strong> <strong>dynamiczne</strong><br />
Mirosław Tomera<br />
1. WPROWADZENIE<br />
Transformata Laplace’a pozwala na przekształcenie równania różniczkowego opisującego liniowy<br />
i stacjonarny układ fizyczny na równanie algebraiczne wyrażone w zależności od zmiennej zespolonej<br />
s. Wykorzystując to równanie algebraiczne można uzyskać transmitancję wyrażającą zależność<br />
pomiędzy wejściem i wyjściem układu. Metoda ta jest bardzo użyteczna w projektowaniu i analizie<br />
układów i pozwala na zastosowanie schematów blokowych do wyrażenia powiązanych ze sobą<br />
elementów składowych układu.<br />
Duża dostępność i łatwość użycia komputerów cyfrowych pozwala na szybkie rozwiązywanie<br />
problemów sterowania opisanych w dziedzinie czasu. Poza tym techniki stosowane w dziedzinie czasu<br />
mogą być zastosowane do układów nieliniowych, niestacjonarnych i wielowymiarowych. Dziedzina<br />
czasu wyraża odpowiedzi i opis układu w zależności od czasu t. Opis w dziedzinie czasu jest podstawą<br />
nowoczesnej teorii sterowania i optymalizacji układów.<br />
Fizyczny układ dynamiczny może być opisany równaniem różniczkowym ntego rzędu.<br />
Stosując zbiór zmiennych, zwanych zmiennymi stanu, można uzyskać zbiór n równań różniczkowych<br />
pierwszego rzędu. Grupując równania pierwszego rzędu przy użyciu notacji macierzowej otrzymuje<br />
się opis zwany modelem zmiennych stanu.<br />
2. ZMIENNE STANU UKŁADU DYNAMICZNEGO<br />
Analiza i projektowanie układów sterowania w dziedzinie czasu wykorzystuje koncepcję stanu układu.<br />
Stan układu jest zbiorem takich zmiennych, które pozwalają przewidzieć przyszłe wartości stanów<br />
i wyjścia układu na podstawie wiedzy o tych zmiennych, funkcjach wejściowych i równaniach<br />
opisujących dynamikę układu. Dla układu <strong>dynamiczne</strong>go, stan układu opisany jest w zależności od<br />
zbioru zmiennych stanu [ x1( t),<br />
x2<br />
( t),...,<br />
xn<br />
( t)]<br />
. Zmienne stanu są takimi zmiennymi, które określają<br />
przyszłe zachowanie układu przy znanym stanie obecnym układu i sygnałach wymuszających.<br />
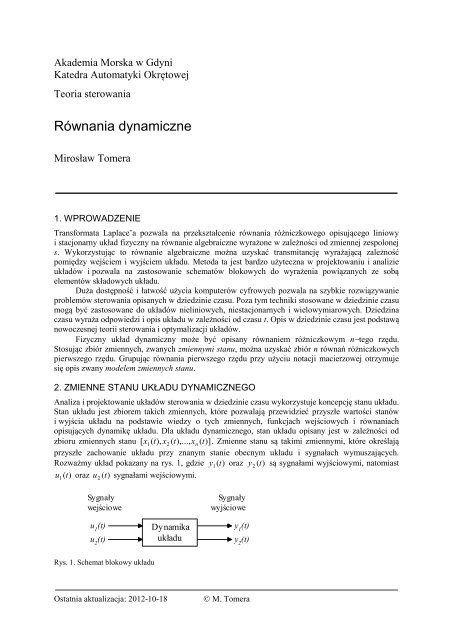
Rozważmy układ pokazany na rys. 1, gdzie y 1( t)<br />
oraz 2 ( ) t y są sygnałami wyjściowymi, natomiast<br />
u ( ) oraz u ( ) sygnałami wejściowymi.<br />
1 t<br />
2 t<br />
Sygnały<br />
wejściowe<br />
u 1 (t)<br />
u 2 (t)<br />
Rys. 1. Schemat blokowy układu<br />
Dynamika<br />
układu<br />
Sygnały<br />
wyjściowe<br />
y 1 (t)<br />
y 2 (t)<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Zbiór zmiennych stanu ( 1, 2,...,<br />
n ) x x x dla układu pokazanego na rysunku 1 jest zbiorem takiej wiedzy<br />
o warunkach początkowych zmiennych stanu [ x1( to<br />
), x2<br />
( to<br />
),..., xn<br />
( to<br />
)] w chwili początkowej t o oraz<br />
sygnałach wejściowych u 1( t)<br />
oraz 2 ( ) t u dla t to<br />
, która wystarczy do określenia wartości<br />
przyszłych zmiennych stanu i wyjścia. W postaci ogólnej dynamika układu pokazana jest na rys. 2.<br />
Warunki<br />
x(0)<br />
początkowe<br />
Wejście<br />
Wyjście<br />
Dynamika układu<br />
u(t) y(t)<br />
Stan x(t)<br />
Rys. 2. Dynamika układu<br />
Koncepcja zbioru zmiennych stanu opisująca układ dynamiczny może zostać zilustrowana na prostym<br />
przykładzie masy zawieszonej na sprężynie.<br />
Przykład 1<br />
Dla układu pokazanego na rysunku 1.1 wyznacz równania stanu.<br />
b<br />
M<br />
y(t) u(t)<br />
Rys. 1.1. Układ masasprężyna-<br />
tłumik<br />
k<br />
Rozwiązanie. Liczba wybranych zmiennych stanu reprezentujących ten<br />
układ powinna być najmniejszą z możliwych celem uniknięcia<br />
nadmiarowych zmiennych stanu. Zbiór zmiennych stanu wystarczający do<br />
opisu tego układu zawiera pozycję i prędkość poruszania się masy.<br />
Dlatego też zdefiniowany zbiór zmiennych stanu ( 1, 2 ) x x składa się z<br />
następujących zmiennych:<br />
dy(<br />
t)<br />
x1( t)<br />
y(<br />
t)<br />
oraz x2<br />
( t)<br />
. (1.1)<br />
dt<br />
Równanie różniczkowe opisujące zachowanie się układu z rysunku 1.1 ma<br />
postać<br />
2<br />
d y(<br />
t)<br />
dy(<br />
t)<br />
M b ky u(<br />
t)<br />
(1.2)<br />
2<br />
dt dt<br />
gdzie: k stała sprężyny, b współczynnik tarcia. Aby zapisać równanie (1.2) w zależności od<br />
zmiennych stanu, podstawione zostały zmienne stanu opisane zależnościami (1.1)<br />
dx2<br />
M bx2<br />
kx1<br />
u(<br />
t)<br />
(1.3)<br />
dt<br />
<strong>Równania</strong> różniczkowe (1.3) można również zapisać w postaci następującego zbioru dwóch<br />
równań różniczkowych pierwszego rzędu:<br />
dx<br />
x2<br />
(1.4)<br />
dt<br />
.<br />
1<br />
x1 <br />
.<br />
x<br />
2<br />
dx2<br />
b k 1<br />
x2<br />
x1<br />
u<br />
(1.5)<br />
dt M M M<br />
Uzyskany zbiór równań różniczkowych opisuje zachowanie stanu układu w zależności od<br />
prędkości zmiany każdej zmiennej stanu.<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 2
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Zmienne stanu opisują przyszłą odpowiedź układu przy danym stanie obecnym, sygnałach<br />
pobudzających i równaniach opisujących dynamikę układu.<br />
Zmienne stanu charakteryzują zachowanie <strong>dynamiczne</strong> układu. W układach fizycznych tymi<br />
zmiennymi są takie wielkości fizyczne jak napięcia, prądy, prędkości, pozycje, ciśnienia, temperatury,<br />
itd. Koncepcja stanu układu nie ogranicza się tylko do analizy układów fizycznych i jest również<br />
wykorzystywana w analizowaniu systemów biologicznych, społecznych i ekonomicznych. Dla tych<br />
systemów koncepcja stanu jest rozszerzana poza koncepcję energii układu fizycznego do szerszego<br />
pojęcia zmiennej, która opisuje ich przyszłe zachowanie.<br />
3. RÓWNANIA DYNAMICZNE STANU<br />
Stan układu opisywany jest przez zbiór równań różniczkowych pierwszego rzędu w zależności od<br />
zmiennych stanu ( 1, 2,...,<br />
n ) x x x . Te równania różniczkowe pierwszego rzędu mogą być zapisane<br />
w następującej postaci ogólnej jako:<br />
.<br />
x<br />
.<br />
x<br />
...<br />
.<br />
x<br />
1<br />
2<br />
n<br />
a<br />
a<br />
a<br />
11<br />
21<br />
x<br />
1<br />
x<br />
x<br />
1<br />
n1<br />
1<br />
a<br />
12<br />
a<br />
a<br />
22<br />
x<br />
n2<br />
2<br />
x<br />
x<br />
2<br />
2<br />
... a<br />
1n<br />
... a<br />
... a<br />
x<br />
2n<br />
nn<br />
n<br />
x<br />
x<br />
b<br />
n<br />
n<br />
11<br />
b<br />
b<br />
u<br />
21<br />
1<br />
u<br />
u<br />
n1<br />
1<br />
... b<br />
1<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 3<br />
1m<br />
... b<br />
... b<br />
.<br />
gdzie x dx dt . Zbiór równań różniczkowych pierwszego rzędu (1) może być zapisany<br />
w następującej notacji macierzowej<br />
d<br />
dt<br />
x1<br />
a11<br />
<br />
<br />
x2<br />
<br />
a21<br />
... ...<br />
<br />
x4<br />
an1<br />
a<br />
a<br />
a<br />
12<br />
22<br />
n2<br />
...<br />
...<br />
...<br />
...<br />
a1n<br />
x1<br />
<br />
b11<br />
a2n<br />
<br />
x2<br />
<br />
<br />
<br />
...<br />
... <br />
<br />
bn1<br />
ann<br />
xn<br />
<br />
...<br />
...<br />
u<br />
2m<br />
nm<br />
m<br />
u<br />
u<br />
m<br />
m<br />
b1m<br />
u1<br />
<br />
...<br />
<br />
<br />
<br />
<br />
...<br />
<br />
b <br />
<br />
<br />
nm um<br />
<br />
Macierz kolumnowa składająca się ze zmiennych stanu nazywana jest wektorem stanu i zapisywana<br />
jest następująco<br />
x1<br />
<br />
<br />
<br />
x2<br />
x <br />
(3)<br />
... <br />
<br />
x<br />
n <br />
Wektor sygnałów wejściowych określany jest jako u . Równanie (2) w postaci ogólnej przedstawiane<br />
jest w postaci następującego zapisu macierzowego<br />
.<br />
x Ax Bu<br />
.<br />
Równanie różniczkowe (4) zazwyczaj nazywane jest równaniem stanu.<br />
Macierz A jest macierzą kwadratową o wymiarach n<br />
n m.<br />
Równanie różniczkowe stanu odnosi prędkość zmiany stanu układu<br />
(1)<br />
(2)<br />
(4)<br />
n , natomiast macierz B jest o wymiarach<br />
.<br />
x do stanu tego układu x<br />
i sygnałów wejściowych u . Ogólnie wyjścia y układu liniowego mogą być odniesione do zmiennych<br />
stanu x i sygnałów wejściowych u przez równanie wyjścia zapisane w postaci ogólnej<br />
y C x Du<br />
(5)<br />
gdzie y jest zbiorem sygnałów wyjściowych wyrażonych w formie wektora kolumnowego.
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Przykład 2<br />
Korzystając z równań (1.4) i (1.5) można uzyskać równanie różniczkowe zmiennych stanu dla<br />
układu pokazanego na rys. 1.1 w postaci<br />
oraz równanie wyjścia<br />
<br />
x k b x 1 u<br />
<br />
<br />
M M <br />
<br />
M <br />
0 1 0<br />
.<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 4<br />
(2.1)<br />
y [ 1 0]<br />
x [ 0]<br />
u<br />
(2.2)<br />
Po podstawieniu b = 3, k = 2, M = 1, otrzymuje się<br />
4. MACIERZ TRANZYCJI STANU<br />
. 0 1<br />
0<br />
x x u<br />
<br />
2 3<br />
1<br />
(2.3)<br />
y [ 1 0]<br />
x [ 0]<br />
u<br />
(2.4)<br />
Rozwiązanie równania różniczkowego stanu może być uzyskane w podobny sposób w jaki rozwiązuje<br />
się równanie różniczkowe pierwszego rzędu. Rozważmy równanie różniczkowe pierwszego rzędu<br />
.<br />
x ax bu<br />
gdzie x (t)<br />
oraz y (t)<br />
są skalarnymi funkcjami czasu. Spodziewamy się rozwiązania ekspotencjalnego<br />
at<br />
w formie e . Przekształcając równanie (6) przy użyciu transformacji operatorowej Laplace'a,<br />
otrzymuje się<br />
i dlatego też<br />
sX ( s)<br />
x(<br />
0)<br />
aX(<br />
s)<br />
bU(<br />
s)<br />
(7)<br />
x(<br />
0)<br />
b<br />
X ( s)<br />
U(<br />
s)<br />
(8)<br />
s a s a<br />
Przekształcenie odwrotne transformaty Laplace'a równania (8) daje następujące wyrażenie<br />
at<br />
<br />
a(<br />
t<br />
)<br />
x(<br />
t)<br />
e x(<br />
0)<br />
e bu(<br />
) d<br />
t<br />
0<br />
Rozwiązanie równania różniczkowego stanu ma postać podobną do równania (9) i przedstawia się<br />
następująco:<br />
gdzie<br />
t<br />
x(<br />
t)<br />
exp( A t)<br />
x(<br />
0)<br />
exp[ A(<br />
t <br />
)] Bu(<br />
) d<br />
(10)<br />
exp( At)<br />
e<br />
At<br />
0<br />
I At<br />
<br />
2<br />
A t<br />
2!<br />
2<br />
k<br />
A t<br />
... <br />
k!<br />
Wyrażenie (10) może być uzyskane po dokonaniu przekształcenia równania (4) przy użyciu<br />
transformacji Laplace'a i wyznaczeniu<br />
1<br />
1<br />
k<br />
...<br />
(6)<br />
(9)<br />
(11)<br />
X(<br />
s) [ sI<br />
A]<br />
x(<br />
0)<br />
[ sI<br />
A]<br />
BU(<br />
s)<br />
(12)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
1<br />
Zauważmy, że Φ( s ) [ sI<br />
A]<br />
jest transformatą Laplace'a Φ( t) exp( At)<br />
. Macierz funkcji<br />
ekspotencjalnej opisuje niewymuszoną odpowiedź układu i nazywana jest macierzą tranzycji stanu<br />
(t)<br />
. Dlatego też równanie (10) może być przepisane jako<br />
t<br />
x( t) Φ(<br />
t)<br />
x(<br />
0)<br />
+ Φ ( t <br />
) Bu(<br />
) d<br />
(13)<br />
Rozwiązanie układu nie poddanego żadnemu wymuszeniu (gdy u 0 ) ma postać<br />
x1(<br />
t)<br />
11(<br />
t)<br />
<br />
<br />
x2<br />
( t)<br />
<br />
21(<br />
t)<br />
... ...<br />
<br />
xn<br />
( t)<br />
<br />
n1(<br />
t)<br />
0<br />
...<br />
...<br />
...<br />
1n<br />
( t)<br />
x1(<br />
0)<br />
<br />
<br />
<br />
2n<br />
( t)<br />
<br />
x2<br />
( 0)<br />
<br />
... ... <br />
<br />
nn(<br />
t)<br />
xn<br />
( 0)<br />
<br />
Aby określić macierz tranzycji stanu, wszystkie warunki początkowe ustawiane są na zero, za<br />
wyjątkiem jednej zmiennej stanu i wówczas określane jest wyjście każdej zmiennej stanu. Wówczas<br />
element (t)<br />
jest odpowiedzią i-tej zmiennej stanu na warunek początkowy j-tej zmiennej stanu,<br />
ij<br />
przy zerowych wartościach początkowych na wszystkich pozostałych stanach.<br />
Przykład 3<br />
Korzystając z równań (2.3) poszukamy macierzy tranzycji (t)<br />
, a następnie przebiegów<br />
czasowych x ( ) oraz x ( ) , kiedy ) 0 ( x =1, x ( 0)<br />
=0 i u ( t)<br />
0.<br />
1 t<br />
2 t<br />
1<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 5<br />
2<br />
Rys. 3.1. Prezentacja graficzna uzyskanych w przykładzie 3 wyników. (a) Przebieg czasowy zmiennej<br />
stanu x1(t). (b) Przebieg czasowy zmiennej stanu x2(t). (c) Trajektoria wektora stanu na<br />
płaszczyźnie<br />
Macierz tranzycji jest prostą transformatą odwrotną Φ (s)<br />
Φ (t)<br />
= £ 1<br />
{ Φ ( s)}<br />
(3.1)<br />
Najpierw określimy (s)<br />
ze wzoru<br />
1<br />
Φ( s ) [ sI<br />
A]<br />
. Z równania (2.3)<br />
(14)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
wówczas<br />
Macierz odwrotna<br />
0 1<br />
A (3.2)<br />
<br />
2 3<br />
s<br />
1<br />
<br />
[ sI A]<br />
<br />
2<br />
s 3<br />
1<br />
1 s<br />
3 1<br />
Φ( s) [ sI<br />
A]<br />
(3.4)<br />
(<br />
s) 2 s<br />
2<br />
gdzie ( s ) ( s 3)<br />
s 2 s 3s<br />
2 ( s 1)(<br />
s 2)<br />
. Dlatego też macierz tranzycji w postaci<br />
operatorowej jest następująca<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 6<br />
(3.3)<br />
s 3 1 <br />
(<br />
s 1)(<br />
s 2)<br />
( s 1)(<br />
s 2)<br />
<br />
Φ ( s)<br />
<br />
<br />
(3.5)<br />
2<br />
s <br />
<br />
( s 1)(<br />
s 2)<br />
( s 1)(<br />
s 2)<br />
<br />
Wówczas macierz tranzycji stanu jest następująca<br />
(t)<br />
= £ 1<br />
t<br />
2t<br />
t<br />
2t<br />
( 2e<br />
e ) ( e e ) <br />
{ Φ( s)}<br />
t<br />
2t<br />
t<br />
2t<br />
<br />
(<br />
2e<br />
2e<br />
) ( 2e<br />
e ) <br />
Przebiegi czasowe zmiennych stanu na zadane warunki początkowe są wyrażone następująco:<br />
(3.6)<br />
t<br />
2t<br />
x1<br />
( t)<br />
x1<br />
( 0)<br />
1<br />
2e<br />
e <br />
Φ ( t)<br />
Φ(<br />
t)<br />
t<br />
2t<br />
(3.7)<br />
x2<br />
( t)<br />
x2<br />
( 0)<br />
0<br />
<br />
2e<br />
2e<br />
<br />
Przebiegi czasowe zmiennych stanu na zadane warunki początkowe oraz trajektoria wektora<br />
stanu x ( t),<br />
x ( t)]<br />
na płaszczyźnie pokazane są na rysunku 4.<br />
[ 1 2<br />
5. ZALEŻNOŚĆ POMIĘDZY RÓWNANIAMI STANU A TRANSMITANCJĄ<br />
Transmitancja G(s) dla układu z pojedynczym wejściem i pojedynczym wyjściem może zostać<br />
uzyskana na podstawie równań stanu opisanych wzorami (4) oraz (5). Transformata operatorowa tych<br />
równań jest następująca<br />
sX( s)<br />
AX ( s)<br />
BU(<br />
s)<br />
(15)<br />
Y( s)<br />
CX ( s)<br />
(16)<br />
gdzie B jest macierzą o rozmiarach n 1<br />
, natomiast u jest pojedynczym wejściem. Kiedy<br />
poszukiwana jest transmitancja to nie uwzględnia się warunków początkowych (warunki początkowe<br />
są równe zero). Przekształcając równanie (15) uzyskuje się<br />
1<br />
1<br />
[ sI A]<br />
X(<br />
s)<br />
BU(<br />
s)<br />
Ponieważ [ sI A]<br />
Φ(<br />
s)<br />
, otrzymuje się<br />
1<br />
X( s) [<br />
sI<br />
Α]<br />
BU(<br />
s)<br />
Φ(<br />
s)<br />
BU(<br />
s)<br />
Podstawiając X(s) do równania (16) uzyskuje się<br />
1<br />
Y( s)<br />
C[ sI<br />
Α]<br />
BU(<br />
s)<br />
CΦ(<br />
s)<br />
BU(<br />
s)<br />
Dlatego też transmitancja G( s)<br />
Y(<br />
s)<br />
/ U(<br />
s)<br />
wyraża się wzorem<br />
(17)<br />
(18)<br />
(19)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Przykład 4<br />
1<br />
G ( s)<br />
C[ sI<br />
A]<br />
B D<br />
(20)<br />
Poniższy przykład ilustruje sposób wyznaczania transmitancji operatorowej na podstawie<br />
posiadanych równań dynamicznych.<br />
Sposób wyznaczenia macierzy tranzycji w postaci operatorowej ( s ) pokazany jest<br />
w przykładzie 3 i uzyskany wynik opisuje wyrażenie (3.5), natomiast macierze B oraz C<br />
uzyskane z równań (2.3) i (2.4) są następujące<br />
Dla rozważanego układu z pojedynczym wejściem i pojedynczym wyjściem równania stanu są<br />
następujące<br />
d<br />
dt<br />
x1<br />
1<br />
<br />
x<br />
<br />
2 <br />
<br />
<br />
1<br />
<br />
x 3 <br />
2<br />
2<br />
2<br />
1<br />
0<br />
x1<br />
1<br />
0<br />
<br />
x<br />
<br />
2 0<br />
<br />
<br />
<br />
<br />
<br />
<br />
u(<br />
t)<br />
3<br />
<br />
x 3 0<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 7<br />
(4.1)<br />
x1<br />
<br />
y ( t)<br />
[ 1 0 1]<br />
<br />
<br />
<br />
x2<br />
<br />
(4.2)<br />
<br />
x 3 <br />
Wyznacz transmitancję G( s)<br />
Y(<br />
s)<br />
/ U(<br />
s)<br />
przy użyciu wzoru (20).<br />
Rozwiązanie. Transmitancję dla tego układu wyznacza się w następujący sposób<br />
1<br />
G( s)<br />
C [ sI<br />
A]<br />
B [ 1<br />
0<br />
s<br />
1<br />
1]<br />
<br />
<br />
<br />
1<br />
<br />
2<br />
2<br />
s 2<br />
1<br />
0 <br />
0<br />
<br />
<br />
s 3<br />
1<br />
1<br />
<br />
<br />
0<br />
<br />
<br />
0<br />
[ 1 0<br />
2 s<br />
s 6 2s<br />
6<br />
<br />
2<br />
s 3 s 4s<br />
3<br />
<br />
<br />
2s<br />
3 s 3<br />
1]<br />
3 2<br />
s 2s<br />
3s<br />
0 <br />
<br />
0 <br />
2<br />
1<br />
s s<br />
<br />
<br />
<br />
0<br />
<br />
<br />
0<br />
2 s<br />
s 6<br />
2<br />
[ 1 0 1]<br />
s s 3<br />
s 3<br />
3 2 <br />
3 2<br />
s 2s<br />
3s<br />
<br />
s 2s<br />
3s<br />
2s<br />
3 <br />
<br />
<br />
<br />
(4.3)<br />
6. WYZNACZANIE RÓWNAŃ STANU NA PODSTAWIE TRANSMITANCJI<br />
METODĄ DEKOMPOZYCJI<br />
Układy liniowe mogą być opisywane różnymi metodami. Modelując układ liniowy można go opisać<br />
równaniem różniczkowym, transmitancją lub równaniami dynamicznymi. Na rysunku 5.3 pokazany<br />
został schemat blokowy przedstawiający zależności pomiędzy różnymi sposobami opisu układów<br />
liniowych. Dla przykładu, wychodząc z równań różniczkowych opisujących zachowanie układu<br />
liniowego można uzyskać rozwiązanie metodą transmitancji lub metodą równań dynamicznych. Na<br />
schemacie tym pokazane zostało że są możliwe przejścia między różnymi metodami w dowolną
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
stronę. Jedynym zagadnieniem pokazanym na tym schemacie i nie wyjaśnionym jeszcze jest<br />
konstruowanie diagramu stanu na podstawie transmitancji. Proces przechodzenia od transmitancji do<br />
diagramu stanu nosi nazwę dekompozycji. Ogólnie są trzy metody dekompozycji transmitancji:<br />
bezpośrednia, równoległa i kaskadowa. Każda z tych trzech metod dekompozycji ma swoje zalety<br />
i może najlepiej odpowiadać pewnym szczególnym zastosowaniom. Prawdopodobnie najbardziej<br />
efektywnym sposobem rozumienia równań zmiennych stanu jest przedstawienie ich na maszynie<br />
(komputerze) analogowej w postaci diagramu stanów. Maszyna analogowa była urządzeniem<br />
utworzonym z elementów elektrycznych i służyła do symulowania rozwiązań równań różniczkowych<br />
zwyczajnych.<br />
<strong>Równania</strong><br />
różniczkowe<br />
Transmitancja<br />
<strong>Równania</strong><br />
<strong>dynamiczne</strong><br />
Diagram<br />
stanu<br />
Równanie<br />
tranzycji<br />
stanu<br />
Rys. 3. Schemat blokowy przedstawiający zależności pomiędzy różnymi sposobami opisu układów liniowych.<br />
Podstawowym elementem maszyny analogowej był integrator zbudowany na wzmacniaczu<br />
operacyjnym z kondensatorem w sprzężeniu i rezystorem w torze bezpośrednim. Ponieważ integrator<br />
jest urządzeniem na którego wejściu jest pochodna wyjścia tak jak pokazano to na rysunku 5.4 to jeśli<br />
w symulacjach analogowych, określi się wyjścia integratorów jako stan to automatycznie otrzyma się<br />
równania w postaci zmiennych stanu. Jeśli układ jest już opisany przez zmienne stanu to można<br />
skonstruować schemat na podobieństwo symulacji na maszynie analogowej, który nosi nazwę<br />
diagramu stanu. Na schemacie tym wykorzystuje się po jednym integratorze dla każdej zmiennej stanu<br />
i odpowiednio łączy ich wyjścia poprzez odpowiednie wzmocnienia stosowanie do równania<br />
wyrażającego tą zmienną stanu. Rząd takiego układu określa liczba użytych w nim integratorów.<br />
Diagramy stanu są obrazem równań stanu i są dogodnymi sposobami opisu układu z powodu łatwego<br />
wyznaczania transmitancji przy użyciu reguły wzmocnień Masona.<br />
.<br />
x<br />
1<br />
s<br />
Rys. 4. Integrator<br />
6.1. DEKOMPOZYCJA BEZPOŚREDNIA<br />
x<br />
Dekompozycja bezpośrednia stosowana jest do transmitancji zapisanej w postaci ilorazu dwóch<br />
wielomianów. Rozważając transmitancję n-tego rzędu o jednym wejściu U(s) i jednym wyjściu U(s)<br />
(SISO) o postaci<br />
G<br />
n1<br />
n2<br />
Y(<br />
s)<br />
b1s<br />
b2s<br />
... bn1s<br />
bn<br />
( s)<br />
<br />
(21)<br />
n n1<br />
n2<br />
U(<br />
s)<br />
s a1s<br />
a2s<br />
... an1s<br />
an<br />
w której zakłada się, że rząd mianownika jest przynajmniej o jeden rząd większy niż licznika.<br />
Dekompozycja bezpośrednia może być prowadzona na dwa sposoby i prowadzić do diagramu stanu<br />
odpowiadającego postaci kanonicznej sterowalności i innej postaci znanej jako kanonicznej<br />
obserwowalności.<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 8
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Dekompozycja bezpośrednia do postaci kanonicznej sterowalności<br />
Konstruowanie diagramu stanu na podstawie transmitancji metodą bezpośrednią składa się z<br />
następujących kroków:<br />
1. Należy wyrazić transmitancję w ujemnych potęgach s co uzyskuje się przez pomnożenie<br />
n<br />
licznika i mianownika transmitancji (21) przez s .<br />
2. Pomnożenie licznika i mianownika transmitancji przez dodatkową zmienną X(s). Po<br />
wykonaniu tych kroków transmitancja (21) przyjmuje postać<br />
1<br />
Y(<br />
s)<br />
b1s<br />
b<br />
G(<br />
s)<br />
<br />
U(<br />
s)<br />
1<br />
a s <br />
1<br />
1<br />
2<br />
2s<br />
2<br />
a2s<br />
... b<br />
... a<br />
n1<br />
n<br />
n1s<br />
bns<br />
n1<br />
n<br />
n1s<br />
an<br />
s<br />
X ( s)<br />
<br />
X ( s)<br />
3. Zapisując oddzielnie w postaci dwóch równań zależności powstałe w liczniku i mianowniku<br />
transmitancji (22), uzyskuje się<br />
1<br />
1<br />
Y(<br />
s)<br />
( b s<br />
U(<br />
s)<br />
( 1<br />
a s<br />
b<br />
1<br />
1<br />
2<br />
2s<br />
a<br />
... b<br />
2<br />
s<br />
2<br />
n1<br />
n1s<br />
... a<br />
b<br />
n<br />
n1<br />
n1s<br />
s<br />
) X ( s)<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 9<br />
n<br />
a<br />
n<br />
s<br />
n<br />
) X ( s)<br />
4. Aby skonstruować diagram stanu na podstawie dwóch powyższych równań to dodatkowo<br />
równanie (24) należy przekształcić do postaci<br />
1<br />
1<br />
X ( s)<br />
U<br />
( s)<br />
( a s<br />
a<br />
2<br />
s<br />
2<br />
... a<br />
n1<br />
n1s<br />
a<br />
n<br />
s<br />
n<br />
) X ( s)<br />
Diagram stanu utworzony w oparciu o równania (23) i (25) pokazany został na rysunku 5. Dla<br />
uproszczenia stany początkowe nie zostały zaznaczone na tym diagramie. Zmienne stanu x 1( t)<br />
,<br />
2 ( ) t x , ..., ) (t xn definiowane są jako wyjścia integratorów i uporządkowane w kierunku narastającym<br />
od lewej strony diagramu do prawej. <strong>Równania</strong> stanu uzyskiwane są przez zastosowanie reguły<br />
wzmocnień Masona, gdzie pochodne zmiennych stanu są wyjściami, natomiast zmienne stanu<br />
i wejście u(t) są wejściami.<br />
.<br />
.<br />
u x x x 1 1<br />
x 1 1 2 x n-1 x n-1 1<br />
1 n<br />
y<br />
b<br />
s<br />
s<br />
s<br />
s<br />
n<br />
a 1<br />
b 1<br />
a <br />
a n1<br />
Rys. 5. Diagram stanu w postaci kanonicznej sterowalności<br />
b 2<br />
Równanie wyjścia jest również określone przez zastosowanie reguły wzmocnień. Z diagramu stanu<br />
uzyskuje się równania <strong>dynamiczne</strong> o postaci ogólnej opisanej wzorami (4) i (5), gdzie<br />
b n-1<br />
a n<br />
(22)<br />
(23)<br />
(24)<br />
(25)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
A<br />
s<br />
a1<br />
a2<br />
a3<br />
... an<br />
<br />
<br />
<br />
<br />
1 0 0 ... 0<br />
<br />
0 1 0 ... 0<br />
<br />
<br />
... ... ... ... ... <br />
<br />
0 0 0 ... 0<br />
<br />
1<br />
<br />
<br />
<br />
0<br />
<br />
B s 0<br />
<br />
(26)<br />
<br />
...<br />
<br />
<br />
0<br />
<br />
<br />
s [ 1 2 3 .... n ] b b b b C s 0 D (27)<br />
Zgodnie z oczekiwaniami macierze A i B są w postaci kanonicznej sterowalności.<br />
Przykład 5<br />
Dla układu opisanego poniższą transmitancją, wyznacz równania <strong>dynamiczne</strong> w postaci<br />
kanonicznej sterowalności. Uzyskane równania zapisz w postaci macierzowej.<br />
2<br />
Y(<br />
s)<br />
5s<br />
4s<br />
12<br />
G ( s)<br />
<br />
(5.1)<br />
U(<br />
s)<br />
3 2<br />
s 6s<br />
s 3<br />
Rozwiązanie. Na rysunku 5.1. znajduje się diagram stanu w postaci kanonicznej sterowalności<br />
utworzony ma podstawie poniższych równań<br />
1<br />
2<br />
Y( s)<br />
( 5s<br />
4s<br />
12s<br />
) X ( s)<br />
1<br />
2<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 10<br />
3<br />
3<br />
X ( s)<br />
U<br />
( s)<br />
( 6s<br />
s 3s<br />
) X ( s)<br />
Do diagramu z rysunku 5.1 można dojść jeszcze w inny sposób. Po podzieleniu licznika<br />
i mianownika przez najwyższą potęgę s pojawia się 1 w mianowniku.<br />
2<br />
1<br />
Y(<br />
s)<br />
5s<br />
4s<br />
12<br />
5s<br />
4s<br />
G(<br />
s)<br />
<br />
<br />
U(<br />
s)<br />
3 2<br />
1<br />
s 6s<br />
s 3 1<br />
( 6s<br />
s<br />
2<br />
2<br />
12<br />
3s<br />
3<br />
3<br />
P1<br />
P2<br />
P3<br />
<br />
) 1<br />
( L L L<br />
W tej postaci uzyskana transmitancja (5.4) może zostać zinterpretowana jako wyrażenie<br />
1<br />
opisujące regułę wzmocnień Masona. Składniki licznika ( 1 5 <br />
2<br />
P s , 2 4 <br />
3<br />
P s , 3 12 <br />
P s ) są<br />
torami wiodącymi sygnał poprzez integratory z wejścia na wyjście. Składniki mianownika<br />
1<br />
( 1 6 <br />
2<br />
3<br />
L s , L 2 s<br />
, 3 3 <br />
L s ) mogą zostać przedstawione jako pętle. Na rysunku 5.1<br />
sygnał wyjściowy z każdego integratora został oznakowany. Sygnały te nazywane są<br />
zmiennymi stanu układu.<br />
.<br />
u x1 1 x x 1 1 2 1 x3 y<br />
12<br />
U(s) X(s) s<br />
s<br />
s<br />
Y(s)<br />
6<br />
5<br />
1<br />
Rys. 5.1. Diagram stanu w postaci kanonicznej sterowalności utworzony na podstawie transmitancji (5.1)<br />
<br />
3<br />
1<br />
2<br />
3<br />
)<br />
(5.2)<br />
(5.3)<br />
(5.4)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Na podstawie uzyskanego diagramu stanu (Rys. 5.1) uzyskuje się następujący zestaw równań<br />
stanu<br />
i równanie wyjścia<br />
dx1(<br />
t)<br />
6x1<br />
( t)<br />
x2<br />
( t)<br />
3x3<br />
( t)<br />
u(<br />
t)<br />
dt<br />
dx2<br />
( t)<br />
x1(<br />
t)<br />
(5.5)<br />
dt<br />
dx3(<br />
t)<br />
x2<br />
( t)<br />
dt<br />
y t)<br />
5x<br />
( t)<br />
4x<br />
( t)<br />
12x<br />
( t)<br />
(5.6)<br />
( 1 2<br />
3<br />
Powyższe równania można zapisać w postaci następujących macierzowo-wektorowych równań<br />
dynamicznych<br />
d<br />
dt<br />
x1(<br />
t)<br />
6 1<br />
3<br />
x1(<br />
t)<br />
1<br />
<br />
x2<br />
( t)<br />
<br />
1 0 0<br />
<br />
x2<br />
( t)<br />
<br />
0<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
u(<br />
t)<br />
<br />
x3<br />
( t)<br />
<br />
<br />
0 1 0<br />
<br />
x3<br />
( t)<br />
<br />
<br />
0<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 11<br />
(5.7)<br />
x1<br />
( t)<br />
<br />
y ( t)<br />
[ 5 4 12]<br />
<br />
<br />
<br />
x2<br />
( t)<br />
<br />
(5.8)<br />
<br />
x ( ) 3 t <br />
Macierze A i B równania (5.7) wyrażone są w postaci kanonicznej sterowalności.<br />
Dekompozycja bezpośrednia do postaci kanonicznej obserwowalności<br />
Mnożąc licznik i mianownik transmitancji (21) przez<br />
( 1<br />
a<br />
1<br />
1s<br />
a<br />
2<br />
s<br />
2<br />
... a<br />
n1<br />
n1s<br />
a<br />
n<br />
s<br />
n<br />
) Y<br />
( s)<br />
n<br />
s i przekształcając je otrzymuje się<br />
1<br />
1<br />
( b s<br />
b s<br />
Wyznaczając z równania (28) Y(s) uzyskuje się następującą zależność<br />
1<br />
1<br />
Y(<br />
s)<br />
( a<br />
s<br />
a<br />
2<br />
2s<br />
... a<br />
n1<br />
n1s<br />
a<br />
n<br />
s<br />
n<br />
) Y<br />
( s)<br />
2<br />
2<br />
... b<br />
n1<br />
n1s<br />
b<br />
n<br />
s<br />
n<br />
) U<br />
( s)<br />
(28)<br />
1 2<br />
n1<br />
n<br />
( b s b s ... b s b s ) U<br />
( s)<br />
(29)<br />
W oparciu o równanie (29) narysowany został diagram stanu pokazany na rysunku 6.<br />
u<br />
U(s)<br />
b n<br />
a n<br />
.<br />
xn 1<br />
s<br />
x n<br />
b n-1 b 2 b 1<br />
a n-1<br />
.<br />
xn1 x n1<br />
Rys. 6. Diagram stanu w postaci kanonicznej obserwowalności<br />
1<br />
s<br />
a 2<br />
1<br />
.<br />
x2 2<br />
1<br />
s<br />
x 2<br />
a 1<br />
n1<br />
.<br />
x 1<br />
1<br />
s<br />
n<br />
x 1<br />
y<br />
Y(s)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Na wyjściach integratorów zdefiniowane zostały zmienne stanu. W tym przypadku zmienne stanu<br />
zostały ponumerowane w kolejności narastającej od lewej strony diagramu do prawej. Stosując regułę<br />
wzmocnień Masona wyznacza się równania <strong>dynamiczne</strong> o postaci ogólnej (4) i (5), gdzie<br />
A<br />
o<br />
<br />
a<br />
<br />
<br />
a<br />
<br />
a<br />
<br />
...<br />
<br />
<br />
a<br />
1<br />
2<br />
3<br />
n<br />
1<br />
0<br />
0<br />
...<br />
0<br />
0<br />
1<br />
0<br />
...<br />
0<br />
...<br />
...<br />
...<br />
...<br />
...<br />
0<br />
0<br />
<br />
<br />
0<br />
<br />
... <br />
0<br />
<br />
b1<br />
<br />
<br />
<br />
b2<br />
<br />
B o b3<br />
<br />
(30)<br />
<br />
... <br />
<br />
bn<br />
<br />
o [ 1 0 0 ... 0]<br />
C o 0 D (31)<br />
Macierze A i C są w postaci kanonicznej obserwowalności.<br />
Należy zaznaczyć, że transmitancja odpowiadająca dowolnej postaci równań dynamicznych jest<br />
jednoznaczna (unikalna). Natomiast mając daną transmitancję można uzyskać kilka modeli stanu:<br />
postać kanoniczną sterowalności, postać kanoniczną obserwowalności, postać kanoniczną diagonalną<br />
i jeszcze wiele innych postaci.<br />
Przykład 6<br />
Dla transmitancji z przykładu 5 opisanej wzorem (5.1) należy skonstruować diagram stanu<br />
w postaci kanonicznej obserwowalności i zapisać uzyskane równania <strong>dynamiczne</strong> w postaci<br />
kanonicznej obserwowalności.<br />
Rozwiązanie. W celu utworzenia diagramu stanu w postaci kanonicznej obserwowalności<br />
transmitancję (5.1) należy zapisać w następującej postaci<br />
1<br />
2<br />
3<br />
Y( s)<br />
( 5s<br />
4s<br />
12s<br />
) U<br />
( s)<br />
( 6s<br />
s 3s<br />
) Y<br />
( s)<br />
co prowadzi do schematu pokazanego na rysunku 6.1.<br />
Do diagramu z rysunku 5.1 można dojść jeszcze w inny sposób. Po podzieleniu licznika<br />
i mianownika transmitancji 5.1 przez najwyższą potęgę s pojawia się 1 w mianowniku.<br />
2<br />
1<br />
Y(<br />
s)<br />
5s<br />
4s<br />
12<br />
5s<br />
4s<br />
G(<br />
s)<br />
<br />
<br />
U(<br />
s)<br />
3 2<br />
1<br />
s 6s<br />
s 3 1<br />
( 6s<br />
s<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 12<br />
2<br />
2<br />
1<br />
12<br />
3s<br />
3<br />
3<br />
2<br />
3<br />
P1<br />
P2<br />
P3<br />
<br />
) 1<br />
( L L L<br />
W tej postaci uzyskana transmitancja (6.2) może zostać zinterpretowana jako wyrażenie<br />
1<br />
opisujące regułę wzmocnień Masona. Składniki licznika ( 1 5 <br />
2<br />
P s , 2 4 <br />
3<br />
P s , 3 12 <br />
P s ) są<br />
torami wiodącymi sygnał poprzez integratory z wejścia na wyjście. Składniki mianownika<br />
1<br />
( 1 6 <br />
2<br />
3<br />
L s , L 2 s<br />
, 3 3 <br />
L s ) mogą zostać przedstawione jako pętle. Na rysunku 6.1<br />
sygnał wyjściowy z każdego integratora został oznakowany.<br />
u<br />
U(s)<br />
12<br />
3<br />
1<br />
s<br />
x 3<br />
5<br />
. . .<br />
x 3<br />
1<br />
x 2<br />
1<br />
s<br />
x 2<br />
Rys. 6.1. Diagram stanu w postaci kanonicznej obserwowalności utworzony na podstawie transmitancji<br />
(5.1)<br />
6<br />
x 1<br />
1<br />
s<br />
1<br />
2<br />
x 1<br />
3<br />
)<br />
y<br />
Y(s)<br />
(6.1)<br />
(6.2)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Na podstawie diagramu stanu z rysunku 6.1 uzyskuje się następujący zestaw równań stanu<br />
będących równaniami różniczkowymi pierwszego rzędu<br />
i równanie wyjścia<br />
dx1(<br />
t)<br />
6x1<br />
( t)<br />
x2<br />
( t)<br />
5u(<br />
t)<br />
dt<br />
dx2<br />
( t)<br />
x1<br />
( t)<br />
x3(<br />
t)<br />
4u(<br />
t)<br />
(6.3)<br />
dt<br />
dx3(<br />
t)<br />
3x1(<br />
t)<br />
12u(<br />
t)<br />
dt<br />
( ) 1( ) t x t y (6.4)<br />
gdzie x 1 , x2<br />
, x3<br />
są zmiennymi stanu. <strong>Równania</strong> różniczkowe pierwszego rzędu (6.3) mogą<br />
zostać zapisane w postaci macierzowo-wektorowej stanu (4)<br />
i wyjścia (5)<br />
d<br />
dt<br />
x1<br />
( t)<br />
<br />
6<br />
<br />
x2<br />
( t)<br />
<br />
<br />
<br />
<br />
1<br />
<br />
x3<br />
( t)<br />
<br />
<br />
3<br />
1<br />
0<br />
0<br />
0<br />
x1(<br />
t)<br />
5<br />
1<br />
<br />
x2<br />
( t)<br />
<br />
4<br />
<br />
<br />
<br />
<br />
<br />
<br />
u(<br />
t)<br />
0<br />
<br />
x3<br />
( t)<br />
<br />
<br />
12<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 13<br />
(6.5)<br />
x1(<br />
t)<br />
<br />
y ( t)<br />
[ 1 0 0]<br />
<br />
<br />
<br />
x2<br />
( t)<br />
<br />
(6.6)<br />
<br />
x ( ) 3 t <br />
Macierze A i C równań (6.5) oraz (6.6) są wyrażone w postaci kanonicznej obserwowalności.<br />
6.2. DEKOMPOZYCJA RÓWNOLEGŁA DO POSTACI KANONICZNEJ DIAGONALNEJ<br />
Kiedy mianownik transmitancji jest wyrażony w postaci iloczynowej to wówczas można dokonać<br />
rozkładu tej transmitancji na sumę ułamków zwykłych.<br />
n1<br />
n2<br />
b1s<br />
b2s<br />
... bn1s<br />
bn<br />
K1<br />
K 2<br />
G(<br />
s)<br />
<br />
<br />
( s p )( s p )...( s p ) s p s p<br />
1<br />
2<br />
n<br />
1<br />
2<br />
K n<br />
... <br />
s p<br />
Uzyskany diagram stanu będzie składał się z prostych układów pierwszego i drugiego rzędu<br />
połączonych równolegle, które prowadzą do równań stanu w postaci kanonicznej diagonalnej lub<br />
kanonicznej diagonalnej Jordana uzyskiwanej dla przypadku z wielokrotnymi wartościami własnymi.<br />
Bieguny transmitancji (32) mogą mieć wartości rzeczywiste lub zespolone. Obecnie nie ma problemu<br />
z zaimplementowaniem wartości zespolonych w komputerze i dlatego też nie będzie prowadzone<br />
rozróżnienie na przypadki z biegunami rzeczywistymi i zespolonymi.<br />
Wartości własne jednokrotne<br />
Sposób wyznaczania równań dynamicznych w postaci kanonicznej diagonalnej dla przypadku<br />
w którym występują wartości własne jednokrotne przedstawiony został w przykładzie 7.<br />
Przykład 7<br />
Dla układu z pojedynczym wejściem i pojedynczym opisanego poniższą transmitancją,<br />
n<br />
(32)<br />
2<br />
Y(<br />
s)<br />
s 8s<br />
12<br />
G(<br />
s)<br />
<br />
(7.1)<br />
3 2<br />
U(<br />
s)<br />
s 5s<br />
6s
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
wyznacz równania <strong>dynamiczne</strong> w postaci kanonicznej diagonalnej.<br />
Rozwiązanie. W pierwszej kolejności należy dokonać rozkładu transmitancji (7.1) na ułamki<br />
proste, w ten sposób otrzymuje się<br />
2<br />
s 8s<br />
12<br />
9<br />
12 2<br />
G(<br />
s)<br />
<br />
(7.2)<br />
3 2<br />
s 5s<br />
6s<br />
s 3 s 2 s<br />
Transmitancja opisana zależnością (7.2) może zostać przedstawiona jako połączenie równoległe<br />
układów pierwszego rzędu co zostało pokazane na rysunku 7.1.<br />
u<br />
U(s)<br />
.<br />
x 1<br />
.<br />
x 2<br />
.<br />
x 3<br />
1<br />
s<br />
3<br />
1<br />
s<br />
2<br />
1<br />
s<br />
x 1<br />
x 2<br />
x 3<br />
9<br />
12<br />
2<br />
Rys. 7.1. Diagram stanu w postaci kanonicznej diagonalnej utworzony na podstawie transmitancji (7.1)<br />
Na podstawie diagramu stanu z rysunku 7.1 uzyskuje się następujący zestaw równań stanu<br />
będących równaniami różniczkowymi pierwszego rzędu<br />
i równanie wyjścia<br />
dx1(<br />
t)<br />
3x1<br />
( t)<br />
u(<br />
t)<br />
dt<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 14<br />
y<br />
Y(s)<br />
dx2<br />
( t)<br />
2x2<br />
( t)<br />
u(<br />
t)<br />
(7.3)<br />
dt<br />
dx3(<br />
t)<br />
u(<br />
t)<br />
dt<br />
y t)<br />
9x<br />
( t)<br />
12x<br />
( t)<br />
2x<br />
( t)<br />
(7.4)<br />
( 1<br />
2 3<br />
Uzyskane równania stanu zapisane w postaci macierzowo-wektorowej (4)<br />
i wyjścia (5)<br />
d<br />
dt<br />
x1<br />
( t)<br />
0<br />
<br />
x2<br />
( t)<br />
<br />
<br />
<br />
<br />
0<br />
<br />
x3<br />
( t)<br />
<br />
<br />
0<br />
0<br />
1<br />
0<br />
0<br />
x1<br />
( t)<br />
1<br />
0<br />
<br />
x2<br />
( t)<br />
<br />
1<br />
<br />
<br />
<br />
<br />
<br />
<br />
u(<br />
t)<br />
3<br />
<br />
x3<br />
( t)<br />
<br />
<br />
1<br />
(7.5)<br />
x1(<br />
t)<br />
<br />
y ( t)<br />
[ 9 12 2]<br />
<br />
<br />
<br />
x2<br />
( t)<br />
<br />
(7.6)<br />
<br />
x ( ) 3 t
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Wartości własne wielokrotne<br />
<strong>Równania</strong> <strong>dynamiczne</strong> dla układu z wielokrotnymi wartościami własnymi przedstawiane są w postaci<br />
diagonalnej która nosi nazwę postaci diagonalnej Jordana. W poniższym przykładzie zilustrowany<br />
został ten problem.<br />
Przykład 8<br />
Dla układu o jednym wejściu i jednym wyjściu o transmitancji zawierającej pierwiastki<br />
wielokrotne, wyznacz równania <strong>dynamiczne</strong> w postaci kanonicznej diagonalnej.<br />
2<br />
Y(<br />
s)<br />
10s<br />
51s<br />
56 3 7 3<br />
G ( s)<br />
<br />
<br />
(8.1)<br />
2<br />
2<br />
U(<br />
s)<br />
( s 2)<br />
( s 4)<br />
( s 2)<br />
s 2 s 4<br />
Rozwiązanie. Rozważana w tym przykładzie transmitancja jest trzeciego rzędu i chociaż<br />
z iloczynu mianowników prawej strony wzoru (8.1) wynika że wynosi on cztery to jednak<br />
stosuje się tylko trzy integratory co pokazane zostało na diagramie stanu na rysunku 8.1.<br />
Minimalna liczba integratorów w tym przypadku wynosi trzy, przy czym jeden z nich<br />
wykorzystywany jest w dwóch gałęziach.<br />
u<br />
U(s)<br />
.<br />
x 1<br />
.<br />
x 2<br />
.<br />
x 3<br />
1<br />
s<br />
2<br />
1<br />
s<br />
2<br />
1<br />
s<br />
4<br />
x 1<br />
x 2<br />
x 3<br />
3<br />
7<br />
3<br />
Rys. 8.1. Diagram stanu w postaci kanonicznej diagonalnej Jordana utworzony na podstawie<br />
transmitancji (8.1)<br />
Na podstawie diagramu stanu z rysunku 8.1 uzyskuje się następujący zestaw równań stanu<br />
będących równaniami różniczkowymi pierwszego rzędu<br />
i równanie wyjścia<br />
dx1(<br />
t)<br />
2x1<br />
( t)<br />
x2<br />
( t)<br />
dt<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 15<br />
y<br />
Y(s)<br />
dx2<br />
( t)<br />
2x<br />
2 ( t)<br />
u(<br />
t)<br />
(8.2)<br />
dt<br />
dx3<br />
( t)<br />
4x<br />
2 ( t)<br />
u(<br />
t)<br />
dt<br />
y t)<br />
3x<br />
( t)<br />
7x<br />
( t)<br />
3x<br />
( t)<br />
(8.3)<br />
( 1 2 3<br />
Uzyskane równania stanu zapisane w postaci macierzowo-wektorowej (5.43)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
i wyjścia (5.44)<br />
d<br />
dt<br />
x1<br />
( t)<br />
<br />
2<br />
<br />
x2<br />
( t)<br />
<br />
<br />
<br />
<br />
0<br />
<br />
x3<br />
( t)<br />
<br />
<br />
0<br />
6.3. DEKOMPOZYCJA KASKADOWA<br />
1<br />
2<br />
0<br />
0<br />
x1<br />
( t)<br />
0<br />
0<br />
<br />
x2<br />
( t)<br />
<br />
1<br />
<br />
<br />
<br />
<br />
<br />
<br />
u(<br />
t)<br />
4<br />
<br />
x3<br />
( t)<br />
<br />
<br />
1<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 16<br />
(8.4)<br />
x1(<br />
t)<br />
<br />
y ( t)<br />
[ 3 7 3]<br />
<br />
<br />
<br />
x2<br />
( t)<br />
<br />
(8.5)<br />
<br />
x ( ) 3 t <br />
Dekompozycja kaskadowa polega on na tym, że transmitancja zapisywana jest w postaci iloczynu<br />
prostych pierwszo- i drugo-rzędowych czynników.<br />
Y(<br />
s)<br />
s z <br />
<br />
1 s z <br />
<br />
2 s z<br />
G ( s)<br />
K<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
...<br />
2<br />
U(<br />
s)<br />
s p1<br />
<br />
s a1s<br />
a0<br />
s p<br />
Każda z tych czynników transmitancji (33) dekomponowany jest metodą dekompozycji bezpośredniej<br />
i łączony kaskadowo z sąsiednimi. Kiedy transmitancja wypadkowa zawiera zera lub bieguny<br />
zespolone to transmitancje składowe zawierające te zera lub bieguny powinny być drugiego rzędu.<br />
Poniższy przykład ilustruje tą metodę uzyskiwania równań dynamicznych.<br />
Przykład 9<br />
Dla układu o jednym wejściu i jednym wyjściu opisanego poniższą transmitancją,<br />
2<br />
m<br />
n<br />
<br />
<br />
<br />
<br />
(33)<br />
3s<br />
12s<br />
G ( s)<br />
<br />
(9.1)<br />
3 2<br />
s 7s<br />
16s<br />
12<br />
wyznacz równania <strong>dynamiczne</strong> metodą dekompozycji kaskadowej.<br />
Rozwiązanie. W pierwszej kolejności transmitancję opisaną wzorem (9.1) należy przedstawić<br />
w postaci zerowo-biegunowej<br />
3s(<br />
s 4)<br />
G ( s)<br />
<br />
(9.2)<br />
2<br />
( s 3)(<br />
s 2)<br />
Uzyskana postać transmitancji (9.2) zapisana zostanie w postaci następujących iloczynów<br />
3 s 4 s<br />
G ( s)<br />
<br />
(9.3)<br />
s 2 s 3 s 2<br />
i dla każdego z tych czynników należy znaleźć diagram stanu metodą bezpośrednią i połączyć je<br />
kaskadowo, uzyska się w ten sposób strukturę stanu pokazaną na rysunku 9.1. Na podstawie<br />
diagramu stanu z rysunku 9.1 uzyskuje się następujący zestaw równań stanu będących<br />
równaniami różniczkowymi pierwszego rzędu<br />
u<br />
U(s)<br />
.<br />
x 1<br />
1<br />
s<br />
2<br />
x 1<br />
3<br />
1<br />
s<br />
3<br />
x 2<br />
Rys. 9.1. Diagram stanu utworzony metodą dekompozycji kaskadowej na podstawie transmitancji (9.1)<br />
4<br />
1<br />
s<br />
2<br />
x 3<br />
y<br />
Y(s)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
i równanie wyjścia<br />
dx1<br />
( t)<br />
2x1<br />
( t)<br />
u(<br />
t)<br />
dt<br />
dx2<br />
( t)<br />
3x1<br />
( t)<br />
3x2<br />
( t)<br />
(9.4)<br />
dt<br />
dx3<br />
( t)<br />
3x1(<br />
t)<br />
7x<br />
2 ( t)<br />
2x2<br />
( t)<br />
dt<br />
y t)<br />
3x<br />
( t)<br />
7x<br />
( t)<br />
2x<br />
( t)<br />
(9.5)<br />
( 1 2 2<br />
Uzyskane równania stanu zapisane w postaci macierzowo-wektorowej (5.43)<br />
i wyjścia (5.44)<br />
ĆWICZENIA<br />
d<br />
dt<br />
x1<br />
( t)<br />
<br />
2<br />
<br />
x2<br />
( t)<br />
<br />
<br />
<br />
<br />
3<br />
<br />
x3<br />
( t)<br />
<br />
<br />
3<br />
0<br />
3<br />
7<br />
0<br />
x1<br />
( t)<br />
1<br />
0<br />
<br />
x2<br />
( t)<br />
<br />
0<br />
<br />
<br />
<br />
<br />
<br />
<br />
u(<br />
t)<br />
2<br />
<br />
x3<br />
( t)<br />
<br />
<br />
0<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 17<br />
(9.6)<br />
x1(<br />
t)<br />
<br />
y ( t)<br />
[ 3 7 2]<br />
<br />
<br />
<br />
x2<br />
( t)<br />
<br />
(9.7)<br />
<br />
x ( ) 3 t <br />
C1. Wyznacz transmitancję operatorową pomiędzy G( s)<br />
Y(<br />
s)<br />
U(<br />
s)<br />
dla układów opisanych<br />
następującym zestawem równań dynamicznych<br />
.<br />
1(<br />
1 3<br />
.<br />
2 ( t)<br />
x1(<br />
t)<br />
x2<br />
( t)<br />
x3<br />
.<br />
3(<br />
t)<br />
x2<br />
( t)<br />
x3<br />
( t)<br />
u(<br />
a) x t)<br />
2x<br />
( t)<br />
3x<br />
( t)<br />
u(<br />
t)<br />
x <br />
x <br />
( t)<br />
t)<br />
y( t)<br />
3x1(<br />
t)<br />
x2<br />
( t)<br />
2x3<br />
( t)<br />
.<br />
1(<br />
1 2 3<br />
.<br />
2 ( t)<br />
x1(<br />
t)<br />
x2<br />
( t)<br />
x3(<br />
t)<br />
.<br />
3(<br />
t)<br />
x2<br />
( t)<br />
u(<br />
t)<br />
b) x t)<br />
2x<br />
( t)<br />
5x<br />
( t)<br />
6x<br />
( t)<br />
u(<br />
t)<br />
x u(<br />
t)<br />
x <br />
y( t)<br />
x1(<br />
t)<br />
3x2<br />
( t)<br />
6x3<br />
( t)<br />
.<br />
1(<br />
2 3<br />
.<br />
2 ( t)<br />
x1(<br />
t)<br />
u(<br />
t)<br />
.<br />
3(<br />
t)<br />
5x1(<br />
t)<br />
2x2<br />
( t)<br />
x3<br />
c) x t)<br />
x<br />
( t)<br />
x ( t)<br />
x <br />
x ( t)<br />
u(<br />
t)<br />
y( t)<br />
2x1(<br />
t)<br />
3x2<br />
( t)<br />
5x3(<br />
t)<br />
.<br />
1(<br />
1 2<br />
.<br />
2 ( t)<br />
<br />
x1(<br />
t)<br />
x2<br />
( t)<br />
x3<br />
d) x t)<br />
7x<br />
( t)<br />
2x<br />
( t)<br />
u(<br />
t)<br />
x <br />
( t)
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 18<br />
)<br />
(<br />
)<br />
( 2<br />
.<br />
3<br />
t<br />
x<br />
t<br />
x <br />
)<br />
(<br />
3<br />
)<br />
(<br />
)<br />
(<br />
3<br />
)<br />
( 3<br />
2<br />
1<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
y <br />
<br />
<br />
e) )<br />
(<br />
)<br />
(<br />
2<br />
)<br />
(<br />
4<br />
)<br />
(<br />
4<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
1<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
<br />
)<br />
(<br />
2<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
2<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
.<br />
3<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
)<br />
(<br />
2<br />
)<br />
(<br />
)<br />
(<br />
2<br />
)<br />
( 3<br />
2<br />
1<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
y <br />
<br />
<br />
<br />
f) )<br />
(<br />
)<br />
(<br />
2<br />
)<br />
(<br />
)<br />
(<br />
4<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
1<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 2<br />
1<br />
.<br />
2<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
.<br />
3<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
)<br />
(<br />
8<br />
)<br />
(<br />
6<br />
)<br />
(<br />
3<br />
)<br />
( 3<br />
2<br />
1<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
y <br />
<br />
<br />
g) )<br />
(<br />
)<br />
(<br />
5<br />
)<br />
(<br />
)<br />
(<br />
2<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
1<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
2<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
3<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
)<br />
(<br />
5<br />
)<br />
(<br />
3<br />
)<br />
(<br />
2<br />
)<br />
( 3<br />
2<br />
1<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
y <br />
<br />
<br />
h) )<br />
(<br />
)<br />
(<br />
)<br />
(<br />
2<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
1<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
<br />
)<br />
(<br />
2<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
2<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
(<br />
)<br />
( 3<br />
2<br />
1<br />
.<br />
3<br />
t<br />
u<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x <br />
<br />
<br />
<br />
<br />
)<br />
(<br />
3<br />
)<br />
(<br />
)<br />
(<br />
2<br />
)<br />
( 3<br />
2<br />
1<br />
t<br />
x<br />
t<br />
x<br />
t<br />
x<br />
t<br />
y <br />
<br />
<br />
C2. Dla poniższych równań różniczkowych opisujących układy liniowe stacjonarne, wyznacz<br />
transmitancje operatorowe<br />
a) )<br />
(<br />
2<br />
)<br />
(<br />
)<br />
(<br />
3<br />
)<br />
(<br />
2<br />
)<br />
(<br />
2<br />
2<br />
3<br />
3<br />
t<br />
u<br />
t<br />
y<br />
dt<br />
t<br />
dy<br />
dt<br />
t<br />
y<br />
d<br />
dt<br />
t<br />
y<br />
d<br />
<br />
<br />
<br />
<br />
b) )<br />
(<br />
6<br />
)<br />
(<br />
3<br />
)<br />
(<br />
6<br />
)<br />
(<br />
5<br />
)<br />
(<br />
2<br />
)<br />
(<br />
2<br />
2<br />
3<br />
3<br />
t<br />
u<br />
dt<br />
t<br />
du<br />
t<br />
y<br />
dt<br />
t<br />
dy<br />
dt<br />
t<br />
y<br />
d<br />
dt<br />
t<br />
y<br />
d<br />
<br />
<br />
<br />
<br />
<br />
c)<br />
dt<br />
t<br />
du<br />
t<br />
y<br />
dt<br />
t<br />
dy<br />
dt<br />
t<br />
y<br />
d<br />
dt<br />
t<br />
y<br />
d )<br />
(<br />
5<br />
)<br />
(<br />
5<br />
)<br />
(<br />
)<br />
(<br />
10<br />
)<br />
(<br />
2<br />
2<br />
3<br />
3<br />
<br />
<br />
<br />
<br />
d) )<br />
(<br />
36<br />
)<br />
(<br />
19<br />
)<br />
(<br />
3<br />
)<br />
(<br />
12<br />
)<br />
(<br />
7<br />
)<br />
(<br />
2<br />
2<br />
2<br />
2<br />
3<br />
3<br />
t<br />
u<br />
dt<br />
t<br />
du<br />
dt<br />
t<br />
u<br />
d<br />
dt<br />
t<br />
dy<br />
dt<br />
t<br />
y<br />
d<br />
dt<br />
t<br />
y<br />
d<br />
<br />
<br />
<br />
<br />
<br />
e) )<br />
(<br />
8<br />
)<br />
(<br />
10<br />
)<br />
(<br />
4<br />
)<br />
(<br />
4<br />
)<br />
(<br />
4<br />
)<br />
(<br />
2<br />
2<br />
2<br />
2<br />
3<br />
3<br />
t<br />
u<br />
dt<br />
t<br />
du<br />
dt<br />
t<br />
u<br />
d<br />
dt<br />
t<br />
dy<br />
dt<br />
t<br />
y<br />
d<br />
dt<br />
t<br />
y<br />
d<br />
<br />
<br />
<br />
<br />
<br />
f) )<br />
(<br />
8<br />
)<br />
(<br />
16<br />
)<br />
(<br />
3<br />
)<br />
(<br />
8<br />
)<br />
(<br />
4<br />
)<br />
(<br />
2<br />
2<br />
2<br />
2<br />
3<br />
3<br />
t<br />
u<br />
dt<br />
t<br />
du<br />
dt<br />
t<br />
u<br />
d<br />
dt<br />
t<br />
dy<br />
dt<br />
t<br />
y<br />
d<br />
dt<br />
t<br />
y<br />
d
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
3<br />
2<br />
d y(<br />
t)<br />
d y(<br />
t)<br />
dy(<br />
t)<br />
g) 5 3 y(<br />
t)<br />
u(<br />
t)<br />
3<br />
2<br />
dt dt dt<br />
3<br />
2<br />
d y(<br />
t)<br />
d y(<br />
t)<br />
dy(<br />
t)<br />
du(<br />
t)<br />
h) 10 2 y(<br />
t)<br />
2u(<br />
t)<br />
3<br />
2<br />
dt dt dt dt<br />
C3. Dla układów opisanych poniższymi transmitancjami operatorowymi dokonaj dekompozycji<br />
metodą bezpośrednią do postaci kanonicznej sterowalności. Narysuj strukturę (diagram) stanu,<br />
zdefiniuj zmienne stanu x 1 , x 2 , ... od prawej do lewej strony struktury. Zapisz równania<br />
<strong>dynamiczne</strong> w postaci macierzowej.<br />
a)<br />
b)<br />
c)<br />
d)<br />
e)<br />
G ( s)<br />
<br />
s<br />
3<br />
5s<br />
2<br />
1<br />
2<br />
3s<br />
1<br />
4s<br />
10s<br />
8<br />
G(<br />
s)<br />
<br />
3 2<br />
s 4s<br />
4s<br />
G ( s)<br />
<br />
s<br />
G ( s)<br />
<br />
s<br />
G ( s)<br />
<br />
s<br />
3<br />
3<br />
3<br />
5s<br />
10s<br />
2s<br />
2<br />
2<br />
2<br />
10s<br />
s 5<br />
3s<br />
1<br />
3s<br />
2<br />
3s<br />
16s<br />
8<br />
f) G(<br />
s)<br />
<br />
3 2<br />
s 4s<br />
8s<br />
2<br />
2<br />
2s<br />
1<br />
3s<br />
19s<br />
36<br />
g) G(<br />
s)<br />
<br />
3 2<br />
s 7s<br />
12s<br />
h)<br />
G ( s)<br />
<br />
s<br />
3<br />
2<br />
3s<br />
6<br />
2s<br />
2<br />
5s<br />
6<br />
C4. Dla transmitancji z zadania C.3 dokonaj dekompozycji metodą bezpośrednią do postaci<br />
kanonicznej obserwowalności. Narysuj strukturę (diagram) stanu, zdefiniuj zmienne stanu x 1 ,<br />
x 2 ,... od lewej do prawej strony struktury. Zapisz równania <strong>dynamiczne</strong> w postaci macierzowej.<br />
C5. Dla układów dynamicznych liniowych, stacjonarnych opisanych poniższymi transmitancji<br />
dokonaj dekompozycji równoległej do postaci kanonicznej diagonalnej. Narysuj diagram stanu.<br />
Stałe na gałęziach muszą mieć wartości rzeczywiste. Zapisz równania <strong>dynamiczne</strong> w postaci<br />
macierzowej.<br />
a)<br />
b)<br />
G(<br />
s)<br />
<br />
s<br />
G(<br />
s)<br />
<br />
s<br />
3<br />
3<br />
24<br />
4s<br />
3s<br />
2<br />
2s<br />
10<br />
2<br />
3s<br />
2s<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 19
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
c)<br />
d)<br />
e)<br />
2<br />
s 7s<br />
12<br />
G(<br />
s)<br />
<br />
3 2<br />
s 4s<br />
4s<br />
G ( s)<br />
<br />
s<br />
3<br />
s<br />
2<br />
5s<br />
2<br />
2<br />
s<br />
8s<br />
4<br />
2s<br />
6s<br />
4<br />
G(<br />
s)<br />
<br />
3 2<br />
s 2s<br />
2s<br />
5s<br />
10s<br />
5<br />
f) G(<br />
s)<br />
<br />
3 2<br />
s 2s<br />
5s<br />
5s<br />
10s<br />
10<br />
g) G(<br />
s)<br />
<br />
3 2<br />
s 4s<br />
5s<br />
h)<br />
2<br />
2<br />
2<br />
8s<br />
32s<br />
40<br />
G(<br />
s)<br />
<br />
3 2<br />
s 4s<br />
8s<br />
C6. Dla transmitancji z zadania C.5 dokonaj dekompozycji kaskadowej. Narysuj diagram stanu<br />
i zdefiniuj zmienne stanu w kolejności narastającej od lewej strony do prawej. Stałe na gałęziach<br />
muszą mieć wartości rzeczywiste. Zapisz równania <strong>dynamiczne</strong> w postaci macierzowej.<br />
ODPOWIEDZI DO WYBRANYCH ĆWICZEŃ<br />
C1.<br />
C2.<br />
a)<br />
b)<br />
c)<br />
d)<br />
e)<br />
G ( s)<br />
<br />
s<br />
3<br />
s<br />
2<br />
2s<br />
2<br />
3s<br />
1<br />
2<br />
2s<br />
1<br />
4s<br />
12s<br />
18<br />
G ( s)<br />
<br />
3 2<br />
s 3s<br />
6s<br />
4<br />
2s<br />
7s<br />
14<br />
G ( s)<br />
<br />
3 2<br />
s s 6s<br />
1<br />
G ( s)<br />
<br />
s<br />
3<br />
2<br />
3s<br />
2<br />
8s<br />
2<br />
4s<br />
6<br />
2<br />
10s<br />
7<br />
2s<br />
22s<br />
15<br />
G ( s)<br />
<br />
3 2<br />
s 2s<br />
2s<br />
6<br />
5s<br />
18s<br />
35<br />
f) G ( s)<br />
<br />
3 2<br />
s 2s<br />
6s<br />
5<br />
2s<br />
2s<br />
6<br />
g) G ( s)<br />
<br />
3 2<br />
s 2s<br />
6s<br />
6<br />
h)<br />
a)<br />
b)<br />
3s<br />
7s<br />
15<br />
G ( s)<br />
<br />
3 2<br />
s s s 4<br />
G ( s)<br />
<br />
s<br />
G ( s)<br />
<br />
s<br />
c) G<br />
( s)<br />
<br />
s<br />
3<br />
3<br />
3<br />
2<br />
2<br />
2<br />
2<br />
2<br />
2s<br />
3s<br />
1<br />
3s<br />
6<br />
2<br />
2s<br />
5s<br />
6<br />
5s<br />
10s<br />
2<br />
s 5<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 20
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
d)<br />
e)<br />
2<br />
3s<br />
19s<br />
36<br />
G(<br />
s)<br />
<br />
3 2<br />
s 7s<br />
12s<br />
2<br />
4s<br />
10s<br />
8<br />
G(<br />
s)<br />
<br />
3 2<br />
s 4s<br />
4s<br />
2<br />
3s<br />
16s<br />
8<br />
f) G(<br />
s)<br />
<br />
3 2<br />
s 4s<br />
8s<br />
1<br />
g) G ( s)<br />
<br />
3 2<br />
s 5s<br />
3s<br />
1<br />
3s<br />
2<br />
h) G ( s)<br />
<br />
3 2<br />
s 10s<br />
2s<br />
1<br />
C3.<br />
0<br />
a) A <br />
<br />
<br />
0<br />
<br />
1<br />
1<br />
0<br />
3<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [ 1<br />
5<br />
<br />
1<br />
0 0]<br />
, D 0<br />
0<br />
b) A <br />
<br />
<br />
0<br />
<br />
0<br />
1<br />
0<br />
4<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [ 8<br />
4<br />
<br />
1<br />
10 4]<br />
, D 0<br />
0<br />
c) A <br />
<br />
<br />
0<br />
<br />
5<br />
1<br />
0<br />
1<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [<br />
0<br />
10<br />
<br />
1<br />
5 0]<br />
, D 0<br />
0<br />
d) A <br />
<br />
<br />
0<br />
<br />
1<br />
1<br />
0<br />
3<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [ 2<br />
2<br />
<br />
1<br />
0 0]<br />
, D 0<br />
0<br />
e) A <br />
<br />
<br />
0<br />
<br />
1<br />
1<br />
0<br />
2<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [ 2<br />
10<br />
<br />
1<br />
3 0]<br />
, D 0<br />
0<br />
f) A <br />
<br />
<br />
0<br />
<br />
0<br />
1<br />
0<br />
8<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [<br />
8<br />
4<br />
<br />
1<br />
16 3]<br />
, D 0<br />
0<br />
g) A <br />
<br />
<br />
0<br />
<br />
0<br />
1<br />
0<br />
12<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [ 36<br />
7<br />
<br />
1<br />
19 3]<br />
, D 0<br />
0<br />
h) A <br />
<br />
<br />
0<br />
<br />
6<br />
1<br />
0<br />
5<br />
0<br />
0<br />
1<br />
<br />
<br />
, B <br />
<br />
<br />
0<br />
<br />
, C [ 6<br />
2<br />
<br />
1<br />
3 0]<br />
, D 0<br />
C4.<br />
a)<br />
b)<br />
0<br />
0 1<br />
A <br />
<br />
<br />
1 0 3<br />
<br />
,<br />
<br />
0 1 5<br />
0<br />
0 0<br />
A <br />
<br />
<br />
1 0 4<br />
<br />
,<br />
<br />
0 1 4<br />
1<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 0 0 1]<br />
, D 0<br />
<br />
0<br />
8 <br />
B <br />
<br />
<br />
10<br />
<br />
, C [ 0 0 1]<br />
, D<br />
0<br />
<br />
4 <br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 21
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
c)<br />
d)<br />
e)<br />
f)<br />
g)<br />
h)<br />
0<br />
0 5<br />
A <br />
<br />
<br />
1 0 1<br />
<br />
,<br />
<br />
0 1 10<br />
0<br />
0 1<br />
A <br />
<br />
<br />
1 0 3<br />
<br />
,<br />
<br />
0 1 2<br />
0<br />
0 1<br />
A <br />
<br />
<br />
1 0 2<br />
<br />
,<br />
<br />
0 1 10<br />
0<br />
0 0<br />
A <br />
<br />
<br />
1 0 8<br />
<br />
,<br />
<br />
0 1 4<br />
0<br />
0 0<br />
A <br />
<br />
<br />
1 0 12<br />
<br />
,<br />
<br />
0 1 7<br />
0<br />
0 6<br />
A <br />
<br />
<br />
1 0 5<br />
<br />
,<br />
<br />
0 1 2<br />
0<br />
B <br />
<br />
<br />
5<br />
<br />
, C [ 0 0 1]<br />
, D 0<br />
<br />
0<br />
2<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 0 0 1]<br />
, D 0<br />
<br />
0<br />
2<br />
B <br />
<br />
<br />
3<br />
<br />
, C [ 0 0 1]<br />
, D 0<br />
<br />
0<br />
8 <br />
B <br />
<br />
<br />
16<br />
<br />
, C [ 0 0 1]<br />
, D 0<br />
<br />
3 <br />
36<br />
B <br />
<br />
<br />
19<br />
<br />
, C [ 0 0 1]<br />
, D 0<br />
<br />
3 <br />
6<br />
B <br />
<br />
<br />
3<br />
<br />
, C [ 0 0 1]<br />
, D 0<br />
<br />
0<br />
C5. Można uzyskać inne zestawy współczynników macierzy, które również będą poprawne.<br />
0<br />
0 0<br />
8 12<br />
4<br />
a) G ( s)<br />
; A <br />
<br />
s s 1<br />
s 3 <br />
0 1<br />
0<br />
<br />
,<br />
<br />
0 0 3<br />
0<br />
0 0<br />
5 8<br />
3<br />
b) G ( s)<br />
; A <br />
<br />
s s 1<br />
s 2 <br />
0 1<br />
0<br />
<br />
,<br />
<br />
0 0 2<br />
0<br />
0 0<br />
3 2<br />
1<br />
c) G ( s)<br />
; A <br />
<br />
s s 2<br />
2<br />
( s 2)<br />
<br />
0 2 1<br />
<br />
,<br />
<br />
0 0 2<br />
2 1<br />
6<br />
d) G ( s)<br />
;<br />
s 1<br />
s 2<br />
2<br />
( s 2)<br />
2 2<br />
e) G ( s)<br />
;<br />
s 2<br />
s 2s<br />
2<br />
1 4s<br />
8<br />
f) G ( s)<br />
;<br />
s 2<br />
s 2s<br />
5<br />
0<br />
0 0<br />
A <br />
<br />
<br />
0 2 1<br />
<br />
,<br />
<br />
0 0 2<br />
0<br />
0 0<br />
A <br />
<br />
<br />
0 0 1<br />
<br />
,<br />
<br />
0 2 2<br />
0<br />
0 0<br />
A <br />
<br />
<br />
0 0 1<br />
<br />
,<br />
<br />
0 5 2<br />
1<br />
B <br />
<br />
<br />
1<br />
<br />
, C [ 8 12<br />
4]<br />
, D 0<br />
<br />
1<br />
1<br />
B <br />
<br />
<br />
1<br />
<br />
, C [ 5 8<br />
3]<br />
, D 0<br />
<br />
1<br />
1<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 3 2<br />
1]<br />
, D 0<br />
<br />
1<br />
1<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 2 1<br />
6]<br />
, D 0<br />
<br />
1<br />
1<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 2 2 0]<br />
, D 0<br />
<br />
0<br />
1<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 2 8 4]<br />
, D<br />
0<br />
<br />
0<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 22
Teoria sterowania <strong>Równania</strong> <strong>dynamiczne</strong><br />
C6.<br />
2 3s<br />
18<br />
g) G ( s)<br />
;<br />
s 2<br />
s 4s<br />
5<br />
5 3s<br />
12<br />
h) G ( s)<br />
;<br />
s 2<br />
s 4s<br />
8<br />
24<br />
a) G ( s)<br />
<br />
;<br />
s(<br />
s 1)(<br />
s 3)<br />
2(<br />
s 5)<br />
b) G ( s)<br />
<br />
;<br />
s(<br />
s 1)(<br />
s 2)<br />
( s 3)(<br />
s 4)<br />
c) G ( s)<br />
<br />
;<br />
s(<br />
s 2)(<br />
s 2)<br />
s(<br />
s 1)<br />
d) G ( s)<br />
<br />
;<br />
( s 1)(<br />
s 2)(<br />
s 2)<br />
2(<br />
s 1)(<br />
s 2)<br />
e) G ( s)<br />
<br />
2<br />
s(<br />
s 2s<br />
2)<br />
5(<br />
s 1)(<br />
s 1)<br />
f) G ( s)<br />
<br />
2<br />
s(<br />
s 2s<br />
5)<br />
5(<br />
s<br />
g) G ( s)<br />
<br />
s(<br />
s<br />
5(<br />
s<br />
h) G ( s)<br />
<br />
s(<br />
s<br />
Literatura<br />
2<br />
2<br />
2<br />
2<br />
2s<br />
2)<br />
4s<br />
5)<br />
4s<br />
5)<br />
4s<br />
8)<br />
0<br />
0 0<br />
A <br />
<br />
<br />
0 0 1<br />
<br />
,<br />
<br />
0 5 4<br />
0<br />
0 0<br />
A <br />
<br />
<br />
0 0 1<br />
<br />
,<br />
<br />
0 8 4<br />
1<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 2 18<br />
3]<br />
, D 0<br />
<br />
0<br />
1<br />
B <br />
<br />
<br />
0<br />
<br />
, C [ 2 12 3]<br />
, D 0<br />
<br />
0<br />
Dorf R.C., Bishop R.H. Modern Control Systems. Addison-Wesley Longman, 1998.<br />
Hostetter, C.J. Savant, R.T. Stefani R.T. Design of Feedback Control Systems, Saunders College<br />
Publishing, 1989.<br />
Ostatnia aktualizacja: 2012-10-18 M. Tomera 23