

Dynamika - wersja komputerowa 16
Dynamika - wersja komputerowa 16
Dynamika - wersja komputerowa 16

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
⋅<br />
⋅<br />
⋅<br />
⋅<br />
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 1<br />
1. <br />
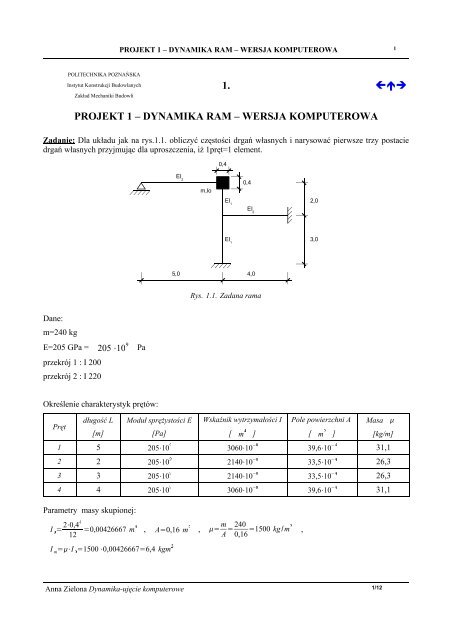
Zadanie:<br />
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA<br />
EI 2<br />
0,4<br />
m,Io<br />
EI 1<br />
0,4<br />
2,0<br />
EI 1<br />
EI 2<br />
3,0<br />
5,0 4,0<br />
Rys. 1.1. Zadana rama<br />
⋅<br />
Pręt<br />
długość L<br />
[m]<br />
Moduł spręŜystości E<br />
[Pa]<br />
Wskaźnik wytrzymałości I<br />
[ m4<br />
]<br />
Pole powierzchni A<br />
[ m2<br />
]<br />
Masa<br />
<br />
[kg/m]<br />
1 ⋅<br />
9<br />
2 ⋅<br />
9<br />
3 ⋅<br />
9<br />
4 ⋅<br />
9<br />
−8<br />
−8<br />
−8<br />
−8<br />
⋅<br />
⋅<br />
−4 −4<br />
−4<br />
⋅<br />
I0= ⋅<br />
4= m4<br />
m2<br />
m = = kg /m2<br />
A<br />
⋅<br />
I m =⋅I0= ⋅ = kgm2<br />
<strong>Dynamika</strong>-ujęcie komputerowe 1/12<br />
A=<br />
=
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 2<br />
[ K ]⋅[q][C ]⋅[q.][M ]⋅[q..]=[ P]<br />
[ K ]⋅[q][M ]⋅[q..]=[ ]<br />
q=q0⋅<br />
q.=−q0⋅⋅<br />
q.=−q0⋅2⋅<br />
t<br />
t<br />
t<br />
[ K ]−⋅[M ]⋅[q0]=[ ]<br />
=2<br />
3<br />
2<br />
1<br />
y<br />
EI 2<br />
1<br />
x<br />
GUW<br />
6<br />
4<br />
240 kg<br />
5<br />
2<br />
9<br />
EI 1<br />
7 EI 2<br />
3 EI 1<br />
8<br />
4<br />
15<br />
14<br />
13<br />
2,0<br />
3,0<br />
12<br />
10<br />
5,0 11 4,0<br />
Rys. 1.2. Stopnie swobody dynamicznej układu<br />
<strong>Dynamika</strong>-ujęcie komputerowe 2/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 3<br />
~<br />
x<br />
LUW<br />
~<br />
~<br />
~<br />
~<br />
~<br />
y<br />
~<br />
1<br />
~<br />
~<br />
~<br />
~<br />
~<br />
~ ~<br />
~<br />
y<br />
~<br />
LUW 2<br />
x<br />
~<br />
~<br />
3<br />
~<br />
y<br />
LUW x<br />
~<br />
~<br />
~<br />
~<br />
~<br />
x<br />
LUW<br />
~<br />
~<br />
~<br />
~<br />
~<br />
~<br />
y<br />
~<br />
4<br />
~<br />
Rys. 1.3. Lokalne przemieszczenia węzłowe<br />
~<br />
[ K e1 ]=[ K e1 ]<br />
~<br />
[ K e2 ]<br />
= o <strong>Dynamika</strong>-ujęcie komputerowe 3/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 4<br />
Zgodnie z prawem transformacji:<br />
Zatem: [ K e2 ]<br />
[ K e ]=[T ] T ~<br />
⋅K<br />
e<br />
⋅[T ] (1.5)<br />
6580500 0 -6580500 -6580500 0 -6580500<br />
0 343375000 0 0 -343375000 0<br />
-6580500 0 8774000 6580500 0 4387000<br />
-6580500 0 6580500 6580500 0 6580500<br />
0 -343375000 0 0 343375000 0<br />
-6580500 0 4387000 6580500 0 8774000<br />
~<br />
c) pręt 3 [ K e3 ]<br />
2289<strong>16</strong>666,67 0 0 -2289<strong>16</strong>666,67 0 0<br />
0 1949777,78 2924666,67 0 -1949777,78 2924666,67<br />
0 2924666,67 5849333,33 0 -2924666,67 2924666,67<br />
-2289<strong>16</strong>666,67 0 0 2289<strong>16</strong>666,67 0 0<br />
0 -1949777,78 -2924666,67 0 1949777,78 -2924666,67<br />
0 2924666,67 2924666,67 0 -2924666,67 5849333,33<br />
[T]<br />
0 1 0 0 0 0<br />
-1 0 0 0 0 0<br />
0 0 1 0 0 0<br />
0 0 0 0 1 0<br />
0 0 0 -1 0 0<br />
0 0 0 0 0 1<br />
Jak uprzednio z prawa transformacji 1.5<br />
[ K e3 ]<br />
d) pręt 4<br />
1949777,78 0 -2924666,67 -1949777,78 0 -2924666,67<br />
0 2289<strong>16</strong>666,67 0 0 -2289<strong>16</strong>666,67 0<br />
-2924666,67 0 5849333,33 2924666,67 0 2924666,67<br />
-1949777,78 0 2924666,67 1949777,78 0 2924666,67<br />
0 -2289<strong>16</strong>666,67 0 0 2289<strong>16</strong>666,67 0<br />
-2924666,67 0 2924666,67 2924666,67 0 5849333,33<br />
~<br />
[ K e4 ]=[ K e4 ]<br />
202950000 0 0 -202950000 0 0<br />
0 1176187,5 2352375 0 -1176187,5 2352375<br />
0 2352375 6273000 0 -2352375 3136500<br />
-202950000 0 0 202950000 0 0<br />
0 -1176187,5 -2352375 0 1176187,5 -2352375<br />
0 2352375 3136500 0 -2352375 6273000<br />
Macierze mas poszczególnych prętów w układach lokalnych i globalnych mają postać:<br />
a) pręt 1<br />
~<br />
[M e1 ]=[M e1 ]<br />
51,83 0 0 25,92 0 0<br />
0 36,65 0 0 21,66 -30,54<br />
0 0 0 0 0 0<br />
25,92 0 0 51,83 0 0<br />
0 21,66 0 0 75,53 -66,64<br />
0 -30,54 0 0 -66,64 74,05<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 4/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 5<br />
b) pręt 2<br />
~<br />
[M e2 ]<br />
17,53 0 0 8,77 0 0<br />
0 19,54 5,51 0 6,76 -3,26<br />
0 5,51 2 0 3,26 -1,5<br />
8,77 0 0 17,53 0 0<br />
0 6,76 3,26 0 19,54 -5,51<br />
0 -3,26 -1,5 0 -5,51 2<br />
=90 o [T]<br />
0 1 0 0 0 0<br />
-1 0 0 0 0 0<br />
0 0 1 0 0 0<br />
0 0 0 0 1 0<br />
0 0 0 -1 0 0<br />
0 0 0 0 0 1<br />
Z prawa transformacji 1.5 otrzymujemy:<br />
[M e2 ]<br />
19,54 0 -5,51 6,76 0 3,26<br />
0 17,53 0 0 8,77 0<br />
-5,51 0 2 -3,26 0 -1,5<br />
6,76 0 -3,26 19,54 0 5,51<br />
0 8,77 0 0 17,53 0<br />
3,26 0 -1,5 5,51 0 2<br />
~<br />
c) pręt 3 [M e3 ]<br />
26,3 0 0 13,15 0 0<br />
0 29,31 12,4 0 10,14 -7,33<br />
0 12,4 6,76 0 7,33 -5,07<br />
13,15 0 0 26,3 0 0<br />
0 10,14 7,33 0 29,31 -12,4<br />
0 -7,33 -5,07 0 -12,4 6,76<br />
[T]<br />
0 1 0 0 0 0<br />
-1 0 0 0 0 0<br />
0 0 1 0 0 0<br />
0 0 0 0 1 0<br />
0 0 0 -1 0 0<br />
0 0 0 0 0 1<br />
Jak uprzednio korzystamy z prawa transformacji 1.5<br />
[M e3 ]<br />
29,31 0 -12,4 10,14 0 7,33<br />
0 26,3 0 0 13,15 0<br />
-12,4 0 6,76 -7,33 0 -5,07<br />
10,14 0 -7,33 29,31 0 12,4<br />
0 13,15 0 0 26,3 0<br />
7,33 0 -5,07 12,4 0 6,76<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 5/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 6<br />
~<br />
d) pręt 4 [M e4 ]=[M e4 ]<br />
41,47 0 0 20,73 0 0<br />
0 46,21 26,06 0 15,99 -15,4<br />
0 26,06 18,96 0 15,4 -14,22<br />
20,73 0 0 41,47 0 0<br />
0 15,99 15,4 0 46,21 -26,06<br />
0 -15,4 -14,22 0 -26,06 18,96<br />
Tabela powiązań dla zadanego układu ma postać:<br />
pręt<br />
Nr przemieszczenia w układzie lokalnym<br />
1 2 3 4 5 6<br />
1 1 2 3 4 5 6<br />
2 4 5 6 7 8 9<br />
3 7 8 9 10 11 12<br />
4 7 8 9 13 14 15<br />
Po wykonaniu agregacji otrzymujemy globalną macierz sztywności w postaci:<br />
[ K ]<br />
<strong>16</strong>2360000 0 0 -<strong>16</strong>2360000 0 0 0 0 0 0 0 0 0 0 0<br />
0 150552 0 0 -150552 752760 0 0 0 0 0 0 0 0 0<br />
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0<br />
-<strong>16</strong>2360000 0 0 <strong>16</strong>8940500 0 -6580500 -6580500 0 -6580500 0 0 0 0 0 0<br />
0 -150552 0 0 343525552 -752760 0 -343375000 0 0 0 0 0 0 0<br />
0 752760 0 -6580500 -752760 12537800 6580500 0 4387000 0 0 0 0 0 0<br />
0 0 0 -6580500 0 6580500 211480277,78 0 3655833,33 -1949777,78 0 -2924666,67 -202950000 0 0<br />
0 0 0 0 -343375000 0 0 573467854,17 2352375 0 -2289<strong>16</strong>666,67 0 0 -1176187,5 2352375<br />
0 0 0 -6580500 0 4387000 3655833,33 2352375 20896333,33 2924666,67 0 2924666,67 0 -2352375 3136500<br />
0 0 0 0 0 0 -1949777,78 0 2924666,67 1949777,78 0 2924666,67 0 0 0<br />
0 0 0 0 0 0 0 -2289<strong>16</strong>666,67 0 0 2289<strong>16</strong>666,67 0 0 0 0<br />
0 0 0 0 0 0 -2924666,67 0 2924666,67 2924666,67 0 5849333,33 0 0 0<br />
0 0 0 0 0 0 -202950000 0 0 0 0 0 202950000 0 0<br />
0 0 0 0 0 0 0 -1176187,5 -2352375 0 0 0 0 1176187,5 -2352375<br />
0 0 0 0 0 0 0 2352375 3136500 0 0 0 0 -2352375 6273000<br />
Oraz globalną macierz mas w postaci: [M ]<br />
51,83 0 0 25,92 0 0 0 0 0 0 0 0 0 0 0<br />
0 36,65 0 0 21,66 -30,54 0 0 0 0 0 0 0 0 0<br />
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0<br />
25,92 0 0 311,37 0 -5,51 6,76 0 3,26 0 0 0 0 0 0<br />
0 21,66 0 0 333,06 -66,64 0 8,77 0 0 0 0 0 0 0<br />
0 -30,54 0 -5,51 -66,64 82,45143 -3,26 0 -1,5 0 0 0 0 0 0<br />
0 0 0 6,76 0 -3,26 90,31 0 -6,89 10,14 0 7,33 20,73 0 0<br />
0 0 0 0 8,77 0 0 90,04 26,06 0 13,15 0 0 15,99 -15,4<br />
0 0 0 3,26 0 -1,5 -6,89 26,06 27,72 -7,33 0 -5,07 0 15,4 -14,22<br />
0 0 0 0 0 0 10,14 0 -7,33 29,31 0 12,4 0 0 0<br />
0 0 0 0 0 0 0 13,15 0 0 26,3 0 0 0 0<br />
0 0 0 0 0 0 7,33 0 -5,07 12,4 0 6,76 0 0 0<br />
0 0 0 0 0 0 20,73 0 0 0 0 0 41,47 0 0<br />
0 0 0 0 0 0 0 15,99 15,4 0 0 0 0 46,21 -26,06<br />
0 0 0 0 0 0 0 -15,4 -14,22 0 0 0 0 -26,06 18,96<br />
Uwaga: wartości w komórkach M 44 i M 55 oprócz składowych z elementarnych macierzy mas<br />
składają się ponadto z wartości masy skupionej m=240 kg . W komórce M 66 dodano natomiast<br />
wartość masowego momentu bezwładności I m<br />
=6,4 kgm 2<br />
Po wykonaniu agregacji macierzy [K] i [M] naleŜy uwzględnić warunki brzegowe:<br />
q 2 =q 10 =q 11 =q 12 =q 13 =q 14 =q 15 ( zerowe przemieszczenia w miejscach podpór)<br />
q 3 =0 (redukcja statyczna)<br />
W wyniku otrzymamy macierz sztywności i macierz mas jak niŜej:<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 6/12
-<br />
v~<br />
x<br />
q~3<br />
q~5<br />
q~4<br />
N 4 x~<br />
q~6<br />
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 7<br />
[K]<br />
<strong>16</strong>2360000 -<strong>16</strong>2360000 0 0 0 0 0<br />
-<strong>16</strong>2360000 <strong>16</strong>8940500 0 -6580500 -6580500 0 -6580500<br />
0 0 343525552 -752760 0 -343375000 0<br />
0 -6580500 -752760 12537800 6580500 0 4387000<br />
0 -6580500 0 6580500 211480277,78 0 3655833,33<br />
0 0 -343375000 0 0 573467854,17 2352375<br />
0 -6580500 0 4387000 3655833,33 2352375 20896333,33<br />
[M]<br />
51,83333 25,9<strong>16</strong>67 0,00000 0,00000 0,00000 0,00000 0,00000<br />
25,9<strong>16</strong>67 311,37048 0,00000 -5,51048 6,76286 0,00000 3,25619<br />
0,00000 0,00000 333,06190 -66,64286 0,00000 8,76667 0,00000<br />
0,00000 -5,51048 -66,64286 82,45143 -3,25619 0,00000 -1,50286<br />
0,00000 6,76286 0,00000 -3,25619 90,30952 0,00000 -6,88810<br />
0,00000 0,00000 8,76667 0,00000 0,00000 90,03905 26,06476<br />
0,00000 3,25619 0,00000 -1,50286 -6,88810 26,06476 27,72286<br />
PowyŜsze postaci [K] i [M] naleŜy uwzględnić w równaniu 1.4. Rozwiązaniem tego równania będą wartości<br />
wartości własne oraz odpowiadające im wektory własne. Obliczenia wykonano wykorzystując program<br />
UPW.<br />
Otrzymano następujące wyniki:<br />
Wartości własne:<br />
Nr<br />
przemieszczeni<br />
a<br />
rad 2 s 2 rad s<br />
Wektory własne:<br />
Nr<br />
przemieszczenia<br />
1 4990 70,64<br />
2 130000 360,4<br />
3 455000 674,4<br />
4 756000 869,3<br />
5 2450000 1563,95<br />
6 4380000 2091,87<br />
7 10400000 3220,3<br />
Wektor 1 Wektor 2 Wektor 3 Wektor4 Wektor 5 Wektor 6 Wektor 7<br />
1 -1,0000000 0,0724749 0,0281846 0,0369559 -0,1202120 -1,0000000 -0,0182838<br />
4 -0,9976120 0,07 0,02246<strong>16</strong> 0,0250221 -0,0189454 0,2337430 0,0159107<br />
5 0,0007466 0,0824980 -0,9227400 0,0699573 -0,0180421 0,0082628 -0,<strong>16</strong>99480<br />
6 -0,4524730 -0,9077360 -1,0883900 -0,0309463 0,1109630 0,0138870 -0,<strong>16</strong>75770<br />
7 -0,0132937 0,0283615 0,0546793 0,0661435 1,3620300 -0,0536462 -0,1148730<br />
8 0,0012969 0,0510777 -0,6027640 0,0139705 0,0726505 -0,0135299 0,9508010<br />
9 -0,2190210 0,2636410 -0,0481431 -1,0046000 0,5251560 -0,0499738 -1,0029300<br />
Celem zadania jest przedstawienie trzech pierwszych postaci drgań własnych. Aby je określić skorzystam z<br />
funkcji przemieszczeń jak niŜej:<br />
Gdzie N i x~<br />
funkcje kształtu.<br />
u~<br />
x<br />
q~2 N 2 x~<br />
N 3 x~<br />
q~1 N 1 x~<br />
N 5 x~<br />
N 6<br />
(1.6)<br />
x~<br />
Otrzymano następujące wyniki:<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 7/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 8<br />
I postać drgań<br />
Wektory przemieszczeń węzłowych w układach lokalnych:<br />
Pręt 1: Pręt 2: Pręt 3: Pręt 4:<br />
-1,0000000<br />
0,00000000<br />
-0,9976120<br />
0,0007466<br />
-0,4524730<br />
0,0007466<br />
0,9976120<br />
-0,4524730<br />
0,0012969<br />
0,0132937<br />
-0,2190210<br />
0,00129685<br />
0,01329370<br />
-0,21902100<br />
0<br />
0<br />
0<br />
-0,0132937<br />
0,0012969<br />
-0,2190210<br />
0<br />
0<br />
0<br />
Uwaga: Wartość przemieszczenia 3 dla pręta 1 jest nieznana,co jest wynikiem zastosowania redukcji statycznej.<br />
Wartości funkcji kształtu oraz funkcji przemieszczeń<br />
Pręt 1<br />
x N 1<br />
N 2<br />
N 3<br />
N 4<br />
N 5<br />
N 6 u x v x<br />
0 1,00000000 1,00000000 0,00000000 0 0,00000000 -1,00000000 0,00000000<br />
1,25 0,75000000 0,63281250 0,25000000 0,36718750 -0,58593750 -0,99940300 0,26539503<br />
2,5 0,50000000 0,31250000 0,50000000 0,68750000 -0,93750000 -0,99880600 0,42470670<br />
3,75 0,25000000 0,08593750 0,75000000 0,91406250 -0,82031250 -0,99820900 0,37185<strong>16</strong>7<br />
5 0,00000000 0,00000000 1,00000000 1,00000000 0,00000000 -0,99761200 0,00074657<br />
Pręt 2<br />
x N 1 N 2 N 3 N 4 N 5 N 6 u x v x<br />
0 1 1 0 0 0 0 0,00074657 0,99761200<br />
0,5 0,75 0,84 0,28 0,25 0,<strong>16</strong> -0,09 0,00088414 0,73708745<br />
1 0,5 0,5 0,25 0,5 0,5 -0,25 0,00102171 0,44708985<br />
1,5 0,25 0,<strong>16</strong> 0,09 0,75 0,84 -0,28 0,00115928 0,18627375<br />
2 0 0 0 1 1 0 0,00129685 0,01329370<br />
Pręt 3<br />
x N 1 N 2 N 3 N 4 N 5 N 6 u x v x<br />
0 1 1 0 0 0 0 0,00129685 0,01329370<br />
0,75 0,75 0,84 0,42 0,25 0,<strong>16</strong> -0,14 0,00097264 -0,0811829<br />
3<br />
1,5 0,5 0,5 0,38 0,5 0,5 -0,38 0,00064843 -0,0754860<br />
3<br />
2,25 0,25 0,<strong>16</strong> 0,14 0,75 0,84 -0,42 0,00032421 -0,0287226<br />
9<br />
3 0 0 0 1 1 0 0,00000000 0,00000000<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 8/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 9<br />
Pręt 4<br />
x N 1<br />
N 2<br />
N 3<br />
N 4<br />
N 5<br />
N 6 u x v x<br />
0,0 1 1 0 0 0 0 -0,01329370 0,00129685<br />
1,0 0,75 0,84 0,56 0,25 0,<strong>16</strong> -0,19 -0,00997028 -0,1221051<br />
0<br />
2,0 0,5 0,5 0,5 0,5 0,5 -0,5 -0,00664685 -0,1088620<br />
8<br />
3,0 0,25 0,<strong>16</strong> 0,19 0,75 0,84 -0,56 -0,00332343 -0,0408638<br />
0<br />
4,0 0 0 0 1 1 0 0,00000000 0,00000000<br />
Rys.1.4 Pierwsza postać drgań własnych<br />
II postać drgań<br />
Wektory przemieszczeń węzłowych w układach lokalnych:<br />
Pręt 1: Pręt 2: Pręt 3: Pręt 4:<br />
0,0724749<br />
0,0824980<br />
0,05107770<br />
0,0283615<br />
0,00000000<br />
-0,0680584<br />
-0,02836150<br />
0,0510777<br />
-0,9077360<br />
0,26364100<br />
0,2636410<br />
0,0680584<br />
0,0510777<br />
0<br />
0<br />
0,0824980<br />
-0,0283615<br />
0<br />
0<br />
-0,9077360<br />
0,2636410<br />
0<br />
0<br />
Wartości funkcji kształtu oraz funkcji przemieszczeń<br />
Pręt 1<br />
x N 1<br />
N 2<br />
N 3<br />
N 4<br />
N 5<br />
N 6 u x v x<br />
0 1,00<br />
1,25 0,75<br />
2,5 0,50<br />
3,75 0,25<br />
5 0,00<br />
1,0000000<br />
0<br />
0,6328125<br />
0<br />
0,3125000<br />
0<br />
0,0859375<br />
0<br />
0,0000000<br />
0<br />
0,00000000 0,00000000 0,00000000 0,07247490 0,00000000<br />
0,25000000 0,36718750 -0,58593750 0,07137078 0,562<strong>16</strong>880<br />
0,50000000 0,68750000 -0,93750000 0,07026665 0,90771988<br />
0,75000000 0,91406250 -0,82031250 0,069<strong>16</strong>253 0,82003552<br />
1,00000000 1,00000000 0,00000000 0,06805840 0,08249800<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 9/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 10<br />
Pręt 2<br />
x N 1<br />
N 2<br />
N 3<br />
N 4<br />
N 5<br />
N 6 u x v x<br />
0,00 1 1 0 0 0 0 0,08249800 -0,06805840<br />
0,50 0,75 0,84 0,28 0,25 0,<strong>16</strong> -0,09 0,07464293 -0,34187285<br />
1,00 0,5 0,5 0,25 0,5 0,5 -0,25 0,06678785 -0,34105420<br />
1,50 0,25 0,<strong>16</strong> 0,09 0,75 0,84 -0,28 0,05893278 -0,19381342<br />
2,00 0 0 0 1 1 0 0,05107770 -0,02836150<br />
Pręt 3<br />
x N 1 N 2 N 3 N 4 N 5 N 6 u x v x<br />
0 1 1 0 0 0 0 0,05107770 -0,02836150<br />
0,75 0,75 0,84 0,42 0,25 0,<strong>16</strong> -0,14 0,03830828 0,08729353<br />
1,5 0,5 0,5 0,38 0,5 0,5 -0,38 0,02553885 0,08468463<br />
2,25 0,25 0,<strong>16</strong> 0,14 0,75 0,84 -0,42 0,01276943 0,03264303<br />
3 0 0 0 1 1 0 0,00000000 0,00000000<br />
Pręt 4<br />
x N 1 N 2 N 3 N 4 N 5 N 6 u x v x<br />
0,00 1 1 0 0 0 0 0,02836150 0,05107770<br />
1,00 0,75 0,84 0,56 0,25 0,<strong>16</strong> -0,19 0,02127113 0,19139487<br />
2,00 0,5 0,5 0,5 0,5 0,5 -0,5 0,01418075 0,15735935<br />
3,00 0,25 0,<strong>16</strong> 0,19 0,75 0,84 -0,56 0,00709038 0,05741358<br />
4,00 0 0 0 1 1 0 0,00000000 0,00000000<br />
Rys.1.5 Druga postać drgań własnych<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 10/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 11<br />
III postać drgań<br />
Wektory przemieszczeń węzłowych w układach lokalnych:<br />
Pręt 1: Pręt 2: Pręt 3: Pręt 4:<br />
0,0281846<br />
0,00000000<br />
0,02246<strong>16</strong><br />
-0,9227400<br />
-1,0883900<br />
-0,9227400<br />
-0,02246<strong>16</strong><br />
-1,0883900<br />
-0,6027640<br />
-0,0546793<br />
-0,0481431<br />
-0,60276400<br />
-0,05467930<br />
-0,04814310<br />
0<br />
0<br />
0<br />
0,0546793<br />
-0,6027640<br />
-0,0481431<br />
0<br />
0<br />
0<br />
Wartości funkcji kształtu oraz funkcji przemieszczeń<br />
Pręt 1<br />
x N 1<br />
N 2<br />
N 3<br />
N 4<br />
N 5<br />
N 6 u x v x<br />
0,00 1,00000000 1,0000000<br />
0<br />
1,25 0,75000000 0,6328125<br />
0<br />
2,50 0,50000000 0,3125000<br />
0<br />
3,75 0,25000000 0,0859375<br />
0<br />
5,00 0,00000000 0,0000000<br />
0<br />
0,00000000 0,00000000 0,00000000 0,02818460 0,00000000<br />
0,25000000 0,36718750 -0,58593750 0,02675385 0,29890992<br />
0,50000000 0,68750000 -0,93750000 0,02532310 0,38598188<br />
0,75000000 0,91406250 -0,82031250 0,02389235 0,04937789<br />
1,00000000 1,00000000 0,00000000 0,02246<strong>16</strong>0 -0,9227400<br />
0<br />
Pręt 2<br />
x N 1 N 2 N 3 N 4 N 5 N 6 u x v x<br />
0 1 1 0 0 0 0 -0,92274000 -0,02246<strong>16</strong>0<br />
0,5 0,75 0,84 0,28 0,25 0,<strong>16</strong> -0,09 -0,84274600 -0,32909189<br />
1 0,5 0,5 0,25 0,5 0,5 -0,25 -0,76275200 -0,29863218<br />
1,5 0,25 0,<strong>16</strong> 0,09 0,75 0,84 -0,28 -0,68275800 -0,13814<strong>16</strong>0<br />
2 0 0 0 1 1 0 -0,60276400 -0,05467930<br />
Pręt 3<br />
x N 1 N 2 N 3 N 4 N 5 N 6 u x v x<br />
0 1 1 0 0 0 0<br />
0,75 0,75 0,84 0,42 0,25 0,<strong>16</strong> -0,14<br />
1,5 0,5 0,5 0,38 0,5 0,5 -0,38<br />
2,25 0,25 0,<strong>16</strong> 0,14 0,75 0,84 -0,42<br />
-0,6027640<br />
0<br />
-0,4520730<br />
0<br />
-0,3013820<br />
0<br />
-0,1506910<br />
0<br />
-0,05467930<br />
-0,06644603<br />
-0,04539331<br />
-0,01531376<br />
3 0 0 0 1 1 0 0,00000000 0,00000000<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 11/12
PROJEKT 1 – DYNAMIKA RAM – WERSJA KOMPUTEROWA 12<br />
Pręt 4<br />
x N 1<br />
N 2<br />
N 3<br />
N 4<br />
N 5<br />
N 6 u x v x<br />
0 1 1 0 0 0 0<br />
1 0,75 0,84 0,56 0,25 0,<strong>16</strong> -0,19<br />
2 0,5 0,5 0,5 0,5 0,5 -0,5<br />
3 0,25 0,<strong>16</strong> 0,19 0,75 0,84 -0,56<br />
4 0 0 0 1 1 0<br />
0,0546793<br />
0<br />
0,0410094<br />
8<br />
0,0273396<br />
5<br />
0,0136698<br />
3<br />
0,0000000<br />
0<br />
-0,60276400<br />
-0,53566262<br />
-0,32545355<br />
-0,10320871<br />
0,00000000<br />
Rys.1.6 Trzecia postać drgań własnych<br />
Anna Zielona <strong>Dynamika</strong>-ujęcie komputerowe 12/12














