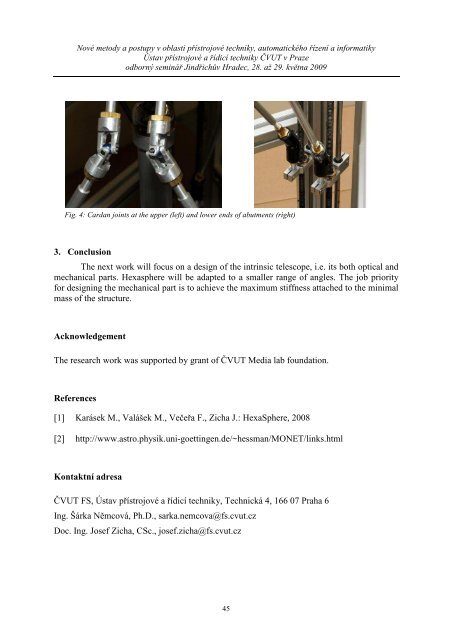
Nové metody a postupy v oblasti přístrojové techniky, automatického řízení a informatikyÚstav přístrojové a řídicí techniky ČVUT v <strong>Praze</strong>odborný seminář Jindřichův Hradec, 28. až 29. května 2009Fig. 4: Cardan joints at the upper (left) and lower ends of abutments (right)3. ConclusionThe next work will focus on a design of the intrinsic telescope, i.e. its both optical andmechanical parts. Hexasphere will be adapted to a smaller range of angles. The job priorityfor designing the mechanical part is to achieve the maximum stiffness attached to the minimalmass of the structure.AcknowledgementThe research work was supported by grant of ČVUT Media lab foundation.References[1] Karásek M., Valášek M., Večeřa F., Zicha J.: HexaSphere, 2008[2] http://www.astro.physik.uni-goettingen.de/~hessman/MONET/links.htmlKontaktní adresaČVUT FS, Ústav přístrojové a řídicí techniky, Technická 4, 166 07 Praha 6Ing. Šárka Němcová, Ph.D., sarka.nemcova@fs.cvut.czDoc. Ing. Josef Zicha, CSc., josef.zicha@fs.cvut.cz45
Nové metody a postupy v oblasti přístrojové techniky, automatického řízení a informatikyÚstav přístrojové a řídicí techniky ČVUT v <strong>Praze</strong>odborný seminář Jindřichův Hradec, 28. až 29. května 2009NÁVRH SFÉRICKÉHO MECHANISMU HEXASPHEREDesign of Spherical Mechanism HexaSphereMatěj Karásek, Michael Valášek, Josef Zicha, Petr SvatošAbstract: The paper deals with a new type of spherical mechanism - Hexasphere,which is a redundantly actuated parallel kinematical structure that enables sphericalmotion in large extent of ± 100 degrees. The kinematic analysis is done, the mainattention is paid to the dexterity that reaches very good values. High movability isproven on a kinematical prototype of the mechanism, where new designapproaches and innovative components were used.Key words: Parallel kinematical structures, redundant actuation, sphericalmechanisms, kinematic analysis, dexterity.1. ÚvodSférické mechanismy, které umožňují natáčení a orientování objektu v prostoru, jsoupoužívány pro řadu důležitých operací. Jsou to mechanismy naklápěcích hlav s vřetenem proobráběcí stroje, které tvoří základ naprosté většiny obráběcích center pro pětiosé obrábění.Montáže teleskopů, tj. mechanismy pro jejich pohyb, jsou také sférické mechanismy. Dalšískupinu tvoří mechanismy pro natáčení různých antén. Mnoho aplikací sférickýchmechanismů je při směrování optických paprsků.6° volnosti6° volnostiObr. 1 Kardanův závěs Obr. 2 Paralelní kinematická struktura Obr. 3 Redundantní pohonyNaprostá většina sférických mechanismů je založena na Kardanově závěsu (Obr. 1).Jeho výhodou je velká pohyblivost, často ±90°. Jedna základní nevýhoda Kardanova závěsujako sériové kinematické struktury je, že je tvořen po sobě jdoucí posloupností rotačníchpohybů a pohony se pohybují spolu s mechanismem. Mimo to je rám konstrukce nevýhodněnamáhán ohybem. Důsledek je nevýhodný poměr mezi hmotností a tuhostí i menší dynamickéschopnosti mechanismu. Dochází ke sčítání chyb v řetězci dílčích pohybů. Druhá základnínevýhoda Kardanova závěsu je, že obsahuje singulární polohu v zenitu způsobující, že nelzemezi všemi polohami v pracovním prostoru realizovat spojitou trajektorii.46