sbornÃk - Fakulta strojnà ČVUT v Praze - Czech Technical University ...
sbornÃk - Fakulta strojnà ČVUT v Praze - Czech Technical University ...
sbornÃk - Fakulta strojnà ČVUT v Praze - Czech Technical University ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
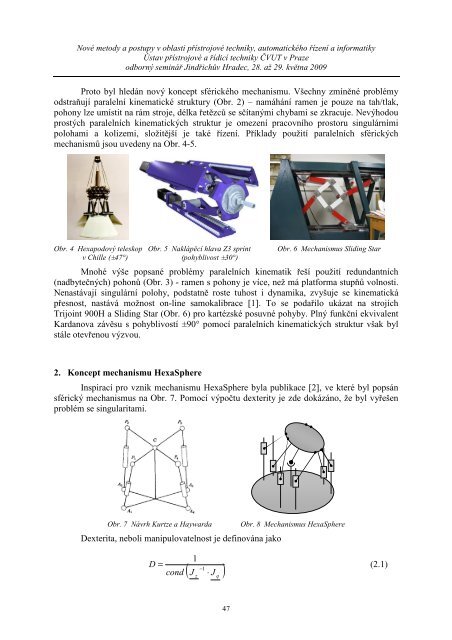
Nové metody a postupy v oblasti přístrojové techniky, automatického řízení a informatikyÚstav přístrojové a řídicí techniky ČVUT v <strong>Praze</strong>odborný seminář Jindřichův Hradec, 28. až 29. května 2009Proto byl hledán nový koncept sférického mechanismu. Všechny zmíněné problémyodstraňují paralelní kinematické struktury (Obr. 2) – namáhání ramen je pouze na tah/tlak,pohony lze umístit na rám stroje, délka řetězců se sčítanými chybami se zkracuje. Nevýhodouprostých paralelních kinematických struktur je omezení pracovního prostoru singulárnímipolohami a kolizemi, složitější je také řízení. Příklady použití paralelních sférickýchmechanismů jsou uvedeny na Obr. 4-5.Obr. 4 Hexapodový teleskop Obr. 5 Naklápěcí hlava Z3 sprintv Chille (±47°) (pohyblivost ±30°)Obr. 6 Mechanismus Sliding StarMnohé výše popsané problémy paralelních kinematik řeší použití redundantních(nadbytečných) pohonů (Obr. 3) - ramen s pohony je více, než má platforma stupňů volnosti.Nenastávají singulární polohy, podstatně roste tuhost i dynamika, zvyšuje se kinematickápřesnost, nastává možnost on-line samokalibrace [1]. To se podařilo ukázat na strojíchTrijoint 900H a Sliding Star (Obr. 6) pro kartézské posuvné pohyby. Plný funkční ekvivalentKardanova závěsu s pohyblivostí ±90° pomocí paralelních kinematických struktur však bylstále otevřenou výzvou.2. Koncept mechanismu HexaSphereInspirací pro vznik mechanismu HexaSphere byla publikace [2], ve které byl popsánsférický mechanismus na Obr. 7. Pomocí výpočtu dexterity je zde dokázáno, že byl vyřešenproblém se singularitami.Obr. 7 Návrh Kurtze a HaywardaDexterita, neboli manipulovatelnost je definována jakoObr. 8 Mechanismus HexaSphereD1=−1cond( J z⋅ J q)(2.1)47