Biomechanische Modellierung
Biomechanische Modellierung
Biomechanische Modellierung

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
10.02.2009<br />
Vorlesung WS 08/09<br />
Vorlesung 2:<br />
Anforderungsanalyse<br />
<strong>Biomechanische</strong> <strong>Modellierung</strong><br />
Prof. Dr. T. Schultz Dr. A. Wörner<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
1
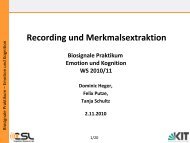
Prozess der Bewegungsanalyse<br />
Gliederung des Gesamtprozesses in Teilabschnitte:<br />
Anforderungsanalyse<br />
Visualisierung<br />
10.02.2009<br />
Simulation<br />
Übertragung<br />
<strong>Biomechanische</strong><br />
<strong>Modellierung</strong><br />
Bewegungsgenerierung<br />
Datenerfassung<br />
Bewegungserkennung<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Datenverarbeitung<br />
/ Bildverarbeitung<br />
Statistische<br />
<strong>Modellierung</strong><br />
Analyse und<br />
Segmentierung der<br />
Daten<br />
2
Anforderungsanalyse<br />
Hintergrund:<br />
Bevor biomechanische <strong>Modellierung</strong> oder Datenerfassung gestartet<br />
werden kann, müssen grundlegende Anforderungen definiert werden<br />
Maßgeblich für die Güte der späteren <strong>Modellierung</strong>:<br />
Fragestellungen:<br />
Analyse des Anwendungsfalls<br />
Welche Daten sollen approximiert werden (Ziel der Aufgabe)?<br />
Zur Verfügung stehende Parameter/erfassbare Größen<br />
(Basis)<br />
Umweltanalyse / Störgrößen<br />
Geforderte Genauigkeit<br />
Antworten abhängig von den Zielvorgaben<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
3
Anforderungsanalyse<br />
Anwendungsfall / Zielvorstellung:<br />
Was soll durch die Modellbildung erreicht bzw. nachgebildet werden?<br />
• Crashtests<br />
• Trainingsanalyse<br />
Wie lange dauert der zu betrachtende Anwendungsfall<br />
(Betrachtungszeit)<br />
Wie viele Personen/Objekte sind an der Tätigkeit beteiligt<br />
Findet eine Interaktion/Fremdeinwirkung zwischen den<br />
Personen statt?<br />
Wirken äußere Kräfte zusätzlich auf die Person ein<br />
Welche Parameter sollen analysiert bzw. simuliert werden<br />
• Ortsveränderungen über die Zeit<br />
• Belastungsgrenzen<br />
Übergeordnetes Ziel: Bewegungserkennung, Generierung,<br />
Bewegungsanalyse<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
4
Anforderungsanalyse<br />
Umweltanalyse / Störgrößen:<br />
Unter welchen Gegebenheiten findet die Anwendung real statt<br />
Welche äußeren Störgrößen sind eventuell vorhanden und<br />
müssen mit abgebildet werden.<br />
Wie stark variiert die Tätigkeit mit wechselnden<br />
Umwelteinflüssen<br />
Lichteinflüsse, künstliche Beleuchtung notwendig<br />
Anbringen künstlicher Hilfsgrößen aufgrund zu großer<br />
Störungen<br />
• Marker notwendig?<br />
• Anderweitige Sensorik?<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
5
Anforderungsanalyse<br />
Basisgrößen:<br />
Welche Anforderungen müssen an die Hardware gestellt werden?<br />
Auswahl der Messverfahren<br />
Welche Parameter sind:<br />
• eindeutig bekannt?<br />
• müssen geschätzt werden?<br />
• müssen gemessen werden?<br />
• können errechnet werden ?<br />
Erforderliche Rate bei der Bilddatenaufnahme<br />
Ganzkörperliche Betrachtung?<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
6
Prozess der Bewegungsanalyse<br />
Gliederung des Gesamtprozesses in Teilabschnitte:<br />
Anforderungsanalyse<br />
Visualisierung<br />
Simulation<br />
Übertragung<br />
10.02.2009<br />
<strong>Biomechanische</strong><br />
<strong>Modellierung</strong><br />
Bewegungsgenerierung<br />
Datenerfassung<br />
Bewegungserkennung<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Datenverabeitung /<br />
Bildverarbeitung<br />
Statistische<br />
<strong>Modellierung</strong><br />
Analyse und<br />
Segmentierung der<br />
Daten<br />
7
Biomechanik: Definition<br />
Was versteht man unter der Biomechanik?<br />
Die Biomechanik, als Teilgebiet der Biophysik, befasst sich mit der<br />
Analyse der Untersuchung der Bewegung biologischer Systeme. Sie<br />
kombiniert hierzu die Methoden, Erkenntnisse und Verfahren der<br />
Mechanik und der Biologie.<br />
Arbeitsgebiet der Technischen Mechanik (Ähnlichkeiten!). Der Entwurf<br />
neuer Produkte orientiert sich immer häufiger am biologischen Vorbild<br />
Äußere Biomechanik: Darstellung der mechanischen Eigenschaften<br />
Innere Biomechanik: Motorische Regelungsprozesse im Körper<br />
Sportbiomechanik: Teilgebiet der Sportwissenschaft<br />
Beschreibung und Erklärung der sportlichen Bewegung mit den<br />
Methoden der Mechanik<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
8
Biomechanik: Ziele<br />
Ziel der Modellbildung:<br />
Abbildung der Kerninformationen aus einem realen Szenario<br />
Verständnis über innere Zusammenhänge<br />
Bestimmung von nur indirekt messbaren Größen durch<br />
Simulation<br />
Modell darf nie als gleichwertig zur Realität verstanden<br />
werden!<br />
Anforderung an ein Modell:<br />
Reproduktion relevanter Eigenschaften der Realität in einem<br />
vorgegebenen Definitionsbereich mit ausreichender<br />
Genauigkeit<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
9
Biomechanik: Modellgüte<br />
Bei der Bewertung der Güte von Modellen sind zwei<br />
Ausprägungen zu unterscheiden:<br />
10.02.2009<br />
Modell 1 Modell 2<br />
Modell zu komplex:<br />
• Schätzung vieler<br />
Modellparameter<br />
• Problematik der<br />
generellen Zuweisung<br />
von konkreten<br />
Parameterwerten<br />
• Spezialisierung<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Modell zu einfach:<br />
• Falsche Ergebnisse<br />
wegen mangelhafter<br />
Abbildung der<br />
Eigenschaften des<br />
realen Objekts<br />
• Unterschlagung<br />
wesentlicher Eigenschaften<br />
• Übergeneralisierung<br />
Merke: Ein komplexeres Modell erhöht nicht zwangsläufig<br />
die Genauigkeit der Approximation, sondern lediglich<br />
zunächst die Anzahl der zu bestimmenden Parameter<br />
Die Genauigkeit ist nicht zwangsläufig steigend, wenn die<br />
Parameter erhöht werden<br />
10
Biomechanik: Modellgüte<br />
Bei der Bewertung der Güte von Modellen sind zwei<br />
Ausprägungen zu unterscheiden:<br />
10.02.2009<br />
Modell 1 Modell 2<br />
Modell zu komplex:<br />
• Schätzung vieler<br />
Modellparameter<br />
• Problematik der<br />
generellen Zuweisung<br />
von konkreten<br />
Parameterwerten<br />
Optimales Modell<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Modell zu einfach:<br />
• Falsche Ergebnisse<br />
wegen mangelhafter<br />
Abbildung der<br />
Eigenschaften des<br />
realen Objekts<br />
• Unterschlagung<br />
wesentlicher Eigenschaften<br />
11
Biomechanik: Modellgüte<br />
Problem: Modellgüte kann nicht a priori bestimmt werden<br />
Der Entwurf eines Modells ist ein iterativer Prozess<br />
Start mit einem einfachen Modell<br />
Verfeinerung bis geforderte Genauigkeit bei der Approximation<br />
erreicht wird<br />
Je mehr Parameter geschätzt oder vorab bestimmt werden müssen<br />
(Materialkonstanten etc.) desto größer wird die Gefahr, dass<br />
sich Fehler verstärken und die Approximation unrealistisch wird<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
12
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht<br />
1. Statische Modellbildung<br />
10.02.2009<br />
1. 1. Verstehen des<br />
menschlichen Körpers<br />
• Gewebestrukturen des Menschen<br />
• Aufbau und Funktion des Bewegungsapparats<br />
1. 2. Nachbilden der<br />
körperlichen Strukturen<br />
• Modellbildung für Knochen, Muskeln,<br />
Gelenke<br />
1. 3. Verkettung der Elemente<br />
im Hinblick auf Anwendungsfall<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel aller Komponenten<br />
Vorarbeit der Modellbildung<br />
Menschmodell<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Anwendungsfall<br />
13
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht<br />
2. Dynamische Modellbildung<br />
Verstehen der menschlichen<br />
Bewegungsabläufe<br />
• Definition der einzelnen<br />
Körperbewegungen<br />
Nachbilden der Bewegungen<br />
<strong>Modellierung</strong> von Bewegungen durch z.B.<br />
innere oder äußere Anregung der<br />
Muskeln<br />
10.02.2009<br />
Simulation<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Externe<br />
Umwelteinflüsse<br />
14
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Bewegungsapparat<br />
Verstehen des menschlichen Körperaufbaus<br />
Gewebestrukturen des Körpers:<br />
Knochen<br />
Knorpelgewebe<br />
Bänder<br />
Muskeln<br />
Sehnen<br />
Die einzelnen Gewebearten weisen ein unterschiedliches mechanisches<br />
Verhalten und biologische Funktion auf und müssen daher separat<br />
betrachtet werden<br />
Zusammenspiel der unterschiedlichen Gewebetypen bildet den<br />
Bewegungsapparat des Menschen<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Bildquelle: http://hamburger-heilpraktiker-fachschule.de/42237/42255.html<br />
15
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Bewegungsapparat<br />
Bewegungsapparat<br />
Der menschliche Bewegungsapparat stellt ein System des Körpers dar,<br />
welches die Körpergestalt und deren Haltung, insbesondere auch<br />
die Fortbewegung ermöglicht. Der Bewegungsapparat unterteilt sich<br />
in den Passiven Bewegungsapparat und den Aktiven<br />
Bewegungsapparat. Die Grenzen zwischen den beiden Bereichen<br />
sind in der Literatur nicht eindeutig definierbar.<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
16
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Bewegungsapparat<br />
Aktiver Bewegungsapparat<br />
Der aktive Bewegungsapparat dient in erster Linie der Bewegung und<br />
besteht aus der Skelettmuskulatur und ihren Anhangs- bzw.<br />
Hilfsorganen:<br />
Muskulatur<br />
Sehnen<br />
Sehnenscheiden, an Belastungspunkten<br />
Schleimbeutel<br />
Faszien (Kollagenhülle um die Muskeln)<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
17
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Bewegungsapparat<br />
Passiver Bewegungsapparat<br />
Der passive Bewegungsapparat (Stützapparat) dient in erster Linie<br />
der Stützung bzw. Formgebung des Körpers und besteht aus dem<br />
Skelett mit seinen verschiedenen Anteilen:<br />
Knochen<br />
Knorpel<br />
Gelenke<br />
Bandscheiben<br />
Bänder<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
18
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Knochengewebe:<br />
Lebendiges Gewebe<br />
Unterschiedliche Knochentypen:<br />
• Röhrenknochen z.B. Oberschenkel<br />
• Platte Knochen z.B. Schädel,<br />
• Kurze Knochen z.B. Fingerknochen,<br />
http://www.uniklinik-saarland.de/med_fak/pathologie/<br />
Knochen_Pathologie/figures_large/Rem_Buch_021.jpg<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.wissenschaft-online.de/abo/ticker/783370<br />
Aufbau des Knochens komplex:<br />
• Im Inneren Spongiosa<br />
• Außen Kompakta<br />
• Knochenhaut, Knochenknorpel<br />
Knochengewebe ist einem permanenten<br />
Umbau unterworfen<br />
Höheres Alter schwächere Knochen<br />
19
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Mechanische Eigenschaften des Knochengewebes:<br />
Mechanische Eigenschaften werden über Spannung-Dehnungskurve<br />
festgelegt<br />
Elastizitätsmodul gibt Dehnfähigkeit des Gewebes an<br />
Ermittlung über Zugversuch mit konstanter<br />
Geschwindigkeit<br />
Parameter unterschiedlich für die Knochenarten<br />
Stark anisotropes Verhalten<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
20
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Mechanische Eigenschaften des Knochen<br />
Kompakter Knochen: Dehnungen bis ca. 2%<br />
Danach Bruch des Materials (Bruchdehnung)<br />
Spongiöse Knochen: Dehnungen bis ca. 75 %<br />
Festigkeit (= Bruchspannung) der Kompakta auf Druck bzw. Zug beträgt<br />
ca. 200 MPa bzw. 130 MPa<br />
Der E-Modul auf Druck bzw. Zug variiert zwischen 10 und 25 Gpa<br />
(Röhrenknochen)<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
21
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Muskelgewebe:<br />
Antriebe für die Fortbewegung<br />
Muskel arbeitet auf Zug, d.h. Stoßbewegung ist<br />
nicht möglich!<br />
pro Gelenk immer eine agonistische und eine<br />
antagonistische Muskelgruppe.<br />
Unterschiedliche Gruppen an Muskeln:<br />
• Quergestreift: Skelettmuskel, Herzmuskel<br />
• Glatt: Hohlorgane z.B. Darm, Speiseröhre<br />
nur Skelettmuskulatur ist bewusst steuerbar<br />
Muskeln sind über die Sehnen mit den Knochen<br />
verbunden<br />
Muskelfasern werden über Axone erregt und zur Kontraktion gebracht<br />
Schwellenspannung und -frequenz müssen überschritten werden<br />
10.02.2009<br />
Bildquelle: http://www.architektur.tu-darmstadt.de/powerhouse/db/248,id_37,s_Papers.fb15<br />
http://www.sportunterricht.de/lksport/muskel5.html<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
22
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Sehnen:<br />
Übertragung der Kraft der Muskulatur auf das Skelett<br />
Verbindungselemente zwischen Muskeln und Knochen<br />
Sehr hohe Zugfestigkeit<br />
Kollagene Bindegewebsfasern<br />
Dämpfung der Kraftübertragung auf den Knochen<br />
10.02.2009<br />
Ursprungssehne: Im Bereich der Ursprungssehne<br />
ziehen die Sehnenfasern gebündelt zwischen den<br />
Muskelfasern und befestigen sich einzeln an den<br />
Muskelfaserhüllen<br />
Ansatzsehne: Im Bereich der Ansatzsehne strahlen<br />
die Sehnenfasern gebündelt und sich teilweise<br />
überkreuzend in den Knochen ein. Dabei wird eine<br />
vorgelagerte Knorpelzone durchlaufen.<br />
http://www.friedbert-kretschmer.de/Bilder/Sehnen%201%20web.gif http://www.ask-gmbh.de/01/002/0021/_7/002173.htm<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
23
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Bänder:<br />
Dehnbare, faserartige Bindegewebsstränge<br />
Verbinden die beweglichen Teile des<br />
Knochenskeletts, d.h. Verbindungen<br />
zwischen Knochen und Knochen<br />
Einschränkung der Beweglichkeit<br />
( Randbedingungen)<br />
http://www.g-netz.de/Der_Mensch/skelett/baender.shtml<br />
10.02.2009<br />
Dehnbarkeit beschränkt Bänderriss<br />
Positionierung von Organen innerhalb des<br />
Körpers<br />
Gelenke erhalten Stabilität durch überziehen<br />
mit Bändern<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
24
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Mechanische Eigenschaften der Sehnen und Bänder:<br />
Band<br />
Zugfestigkeit: 5 MPa<br />
Bruchdehnung: ca. 15-20 %<br />
Einzelne Bänder bis zu 70%<br />
E-Modul 70 – 200 MPa<br />
Bemerkung: Bandmaterial zeigt ein starkes<br />
nicht lineares Verhalten.<br />
Sehne<br />
Zugfestigkeit: 50MPa<br />
Bruchdehnung: ca. 10%<br />
E-Modul: 300 - 1000MPa<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://running.kaywa.ch/files/images/2006/3/480/mob459_1143033591.jpg<br />
25
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Knorpel:<br />
Elastisches, biegsames Gewebe<br />
Hohe Reiß- und Druckresistenz<br />
Bildet zusammen mit dem Knochen das Skelett<br />
Wesentlich für die Abnutzung von Gelenken<br />
10.02.2009<br />
Belastungszustand:<br />
Zu tragende Gewicht drückt auf den<br />
Knorpel<br />
Flüssigkeitssubstanz weicht zurück<br />
Dämpfung der Kraft<br />
Durch Druck erfolgt der Nährstoffausgleich<br />
durch Abtransport im Knorpel<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
26
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Mechanische Eigenschaften des Knorpels:<br />
Druckfestigkeit: 10 MPa,<br />
Bruchstauchung: ca.13%<br />
E-Modul: 5-10 MPa<br />
Bemerkung: Gelenkknorpel zeigt ein elastisches Verhalten bis<br />
zu einer Spannung von 5 MPa<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
27
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Gelenke:<br />
Definition Gelenk:<br />
Bewegliche Verbindung von mehreren Körpern<br />
Anatomisches / Menschliches Gelenk:<br />
Bewegliche Verbindung von mehreren Knochen, gestützt und beschränkt<br />
durch Sehnen und Bänder.<br />
Anatomische Einheit als Zusammenspiel unterschiedlicher Gewebetypen<br />
Komponenten Knochen, Muskeln, Knorpel, Sehnen und<br />
Bänder<br />
Durch Gelenke wird die menschliche Bewegung aufgrund<br />
einer Aktivierung umgesetzt<br />
Wesentlichstes Element der Modellbildung<br />
Unterschiedliche Gelenktypen<br />
10.02.2009<br />
Feiner strukturierte Klassifizierung notwendig<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
28
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Echte Gelenke: Klassifizierung<br />
Scharniergelenk:<br />
Bewegung ist nur um eine Achse möglich<br />
Beispiel: Kniegelenk, Ellenbogen<br />
10.02.2009<br />
Zapfengelenk:<br />
Ringförmige Drehung um einen Zapfen<br />
Sonderform des Scharniergelenks<br />
Beispiel: Kopf<br />
Flache Gelenke:<br />
Drehung um zwei aufeinander senkrechte<br />
Achsen im Raum,<br />
Einschränkungen der Bewegungen möglich<br />
Beispiel: Handgelenk<br />
Sonderform: Sattelgelenke, z.B. Daumen<br />
Kugelgelenk:<br />
größter Bewegungsspielraum um drei Achsen<br />
Beschränkungen durch Anschläge<br />
Beispiel: Schulter<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
29
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Biologische Strukturen versus Technik<br />
Gewebe / Organ Funktion Mech. Eigenheit Techni.„Äquivalent“<br />
Knochen Stützelement Druck-, zug-,<br />
biegefest<br />
Faserknorpel Stützelement Druckfest,<br />
elastisch,<br />
dämpfend<br />
10.02.2009<br />
Quelle: http://www.spitta.de/fileadmin/tt_news/shop/pdf/916779/Biomechanik_S69-74_916779_Spitta.pdf<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Hartholz<br />
Hartgummi<br />
Hyaliner Knorpel Gelenke Minimale Reibung Kugellager<br />
Sehnen Kraftübertragung zugfest Seil<br />
Bänder Gelenkführung zugfest Seil<br />
Muskel Motor kontraktil unbekannt<br />
30
Biomechanik: Parameterbestimmung<br />
Welche Daten/ Parameter stehen für die Modellbildung zur<br />
Verfügung bzw. können erfasst werden?<br />
Werte aus der<br />
Literatur bekannt<br />
• Varianzen in der<br />
Literatur<br />
• Fundiertheit der<br />
Quelle und<br />
Datenerhebung<br />
• Fehlerabschätzung<br />
10.02.2009<br />
Parametebestimmung für die<br />
biomechanische <strong>Modellierung</strong><br />
Werte an Testperson<br />
direkt messbar<br />
• Messungenauigkeit<br />
• Verfahren<br />
• Allgemeingültigkeit /<br />
Varianz<br />
• Fehlerbetrachtung<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Werte an Testperson<br />
indirekt messbar oder<br />
Schätzung<br />
• Algorithmen zur<br />
Berechnung<br />
• Approximation bei der<br />
Berechnung<br />
• Notwendige Parameter<br />
für Schätzung und deren<br />
Fehleranfälligkeit<br />
31
Biomechanik: Messverfahren<br />
Unterschiedliche Messverfahren zur Erfassung der Bewegungsabläufe:<br />
Kinemetrie:<br />
Weg-Zeit-Messung der Lage und Geschwindigkeit von Körpern,<br />
Dynamometrie:<br />
Kraftmessung der äußeren Kräfte, Ableitung der Größen Impuls, Arbeit,<br />
Leistung<br />
Elektromyografie:<br />
Elektrische Messung des Aktivierungszustandes eines Muskels über das<br />
elektrische Potential<br />
Anthropometrie:<br />
Abmessungen und Massenverteilungen, Schwerpunkte im Körper,<br />
Bestimmung des Körperbaus<br />
Man teilt dabei die Messverfahren in elektronische, mechanische und<br />
optische Verfahren.<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
32
Biomechanik: <strong>Biomechanische</strong> Merkmale<br />
Eine Messung ist auf direktem oder<br />
indirektem Weg bei den Verfahren<br />
möglich.<br />
Erfasst werden<br />
physikalische Größen:<br />
• Geschwindigkeit<br />
• Beschleunigung<br />
• Druck<br />
• Kraft<br />
• Drehmoment<br />
• Winkelgeschwindigkeit<br />
• Energie<br />
• Leistung<br />
10.02.2009<br />
<strong>Biomechanische</strong> Merkmale:<br />
Kinematische Merkmale:<br />
• Weg<br />
• Geschwindigkeit<br />
• Beschleunigung<br />
Zeitspezifische Merkmale:<br />
• Frequenz<br />
• Zeit<br />
Dynamische Merkmale:<br />
• Impuls, Masse, Kraft<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
33
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Modellbildung<br />
Problem:<br />
Menschliche Strukturen weitaus komplexer wie technisches<br />
Äquivalent<br />
Dies stellt nur Näherung dar<br />
Viele Prozesse sind nicht vollständig erfasst bzw. erfassbar<br />
Die Biomechanik wendet nur die klassische Mechanik auf<br />
biologische<br />
Systeme an.<br />
Biologische Systeme sind so kompliziert aufgebaut, dass ihre<br />
Bewegungen nicht mit den Strukturen der Mechanik beschreibbar<br />
sind.<br />
Starke Varianzen in dem Gewebeverhalten Alter, Konstitution etc.<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
34
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Modellbildung<br />
Biologisch sind menschliche Bewegung auf die Verkürzung und<br />
Verlängerung von Muskeln zurückzuführen<br />
Dies wird nicht modelliert<br />
Modell in 3D mit Drehfedern ist nur bedingt geeignet<br />
Geeignete/Reale Modelle mit Muskeln und Bändern stehen<br />
nicht zur Verfügung<br />
Ziel ist es nicht, die biologischen Abläufe, wie z.B. Muskelaktivierung zur<br />
Analyse der Bewegungen vollständig nachzubilden.<br />
Es muss ein technisches System definiert werden, dessen Verhalten nach<br />
außen das des Menschen approximiert<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
35
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gelenke<br />
<strong>Modellierung</strong> von Gelenken<br />
Annahme:<br />
Einschränkung der Freiheitsgrade<br />
Starre Kopplung<br />
Real: Knochen werden allein durch Bänder, Knorpel und<br />
Muskel zusammengehalten<br />
Vernachlässigung möglich, aber Verfälschung und<br />
Approximation des Ergebnisses<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
36
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gelenke<br />
Kraftmessung in den Gelenken:<br />
Mechanische Bestimmung der Gelenkbelastung:<br />
Freischnitt des zu betrachtenden Körpers<br />
Berechnung stützt sich auf Gleichgewichtssatz der Mechanik<br />
Errechnet werden Drehmoment, die im Gelenk wirkende Kraft<br />
des Muskels (Hebelarm notwendig), sowie übertragene Kraft<br />
Trägheitskräfte werden meist vernachlässigt<br />
Vereinfachungen bei der Berechnung:<br />
Betrachtung nur einer Muskelkraft, Fehlen von Muskelspannung<br />
Punktförmiger Ansatz der Kraft an Muskel und Sehnen<br />
Keine Berücksichtigung elastischer Vorspannungen oder Überspannungen<br />
Grundlegende Ergebnisse:<br />
Muskelkraft ist erheblich höher als die von außen angreifende Kraft (kleiner Hebel der<br />
Muskulatur)<br />
Belastung wird maßgeblich durch Muskelkraft ausgelöst, nicht durch externe Kraft<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
F2<br />
F3<br />
37<br />
F1
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gelenke<br />
Unterschiedliche Typen von Gelenkmodellierungen<br />
bei der Betrachtung von Gesamtkörperbewegungen:<br />
Kugelgelenke: Drei Rotationsfreiheitsgrade<br />
Beispiel: Schuler<br />
10.02.2009<br />
Verallgemeinerte KARDAN-Gelenke mit zwei<br />
Rotationsfreiheitsgraden um linear unabhängige<br />
Achsen<br />
Beispiel: Daumen<br />
Scharniergelenke mit einem Rotationsfreiheitsgrad<br />
Beispiel: Kniegelenk<br />
Bei feineren <strong>Modellierung</strong>en auch translatorische Anteile<br />
berücksichtigen!<br />
Beachte: Die Gelenkmodellierung durch mechanische Bauteile<br />
stellt lediglich eine Approximation des realen Materialverhaltens dar.<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
38
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Abbildung der Gelenkanschläge:<br />
Problematik:<br />
Bei biologischen Systemen umfasst die<br />
Beweglichkeit der Gelenke nicht den<br />
gesamten Wertebereich der Rotation<br />
<strong>Modellierung</strong> von Anschlägen ermöglicht<br />
das Begrenzen aufgrund maximal zulässiger<br />
Gelenkausschläge<br />
Die aufgrund der <strong>Modellierung</strong> in den Gelenken<br />
gemessene Kraft stellt ein Maß für die Belastung in den<br />
Gelenken dar.<br />
<strong>Modellierung</strong> der Elastizität der Anschläge<br />
nicht zwingend notwendig<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
39<br />
v
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Muskel-Sehnen-Apparat<br />
<strong>Modellierung</strong> von Muskeln und Sehnen als Einheit<br />
Annahme:<br />
Der Muskel ist nicht gefiedert<br />
Die Muskelfaserlänge ist mit der Länge des Muskels identisch<br />
Der Muskel hat ein konstantes Volumen<br />
Muskel kann als Parallelschaltung motorischer Einheiten dargestellt werden<br />
Jede Einheit stellt eine Muskelfaser dar<br />
Jede Einheit wird von Nervenfaser kontrolliert<br />
Definition einer charakteristischen Aktivierungsfunktion<br />
Bei Aktivierung Krafterzeugung abhängig von Kontraktionsdynamik des<br />
Muskels<br />
Anregung<br />
durch Nervenfaser<br />
Regelstrecke des Muskels<br />
Erregung des Muskels in Form von Impulsfolgen legt Aktivierungsgrad des<br />
Muskels fest<br />
10.02.2009<br />
Aktivierungsdynamik<br />
Muskel-<br />
aktivierung<br />
Muskel<br />
kontraktionsdynamik<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Muskelkraft<br />
40
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Gewebetypen<br />
Grundlegende Struktur eines Menschmodells:<br />
Anforderungen:<br />
Einfachster Fall: Reiner Starrkörper mit<br />
menschenähnlicher Massenverteilung<br />
Detailtiefe beliebig erhöhbar<br />
Etabliert hat sich:<br />
3D Modell mit:<br />
• Dreiteilung der Extremitäten in Höhe der<br />
realen Gelenke<br />
• Da starke Varianzen in den Individuen:<br />
Anthropometrische Menschmodell zur<br />
Parametrisierung individueller Modelle<br />
• Auch hier gilt: Abhängig von konkretem<br />
Anwendungsfall!<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
41
Anthropomatische Menschmodelle<br />
Standard Menschmodell:<br />
Fixe Definition der Segmente auf<br />
Basis von Durchschnittswerten<br />
Anthropomatische<br />
Menschmodelle<br />
Dynamisch anpassbare Modelle<br />
auf Basis erfasster Daten z.B.<br />
durch Bodyscan<br />
Unterschiedliche Tests möglich<br />
Vorteile<br />
Bessere Abbildung der<br />
menschlichen Varianz möglich<br />
Abschätzen der Konsequenzen<br />
der Varianz<br />
Höhere Aussagekraft der<br />
Ergebnisse<br />
10.02.2009<br />
RAMSIS-Modell: http://www.lfe.mw.tum.de/lehre/lehrveranstaltungen/Produktergonomie/Produktergonomie4.pdf<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
42
Biomechanik: Grundlegende Mechanik<br />
Newton‘sche Axiome<br />
Axiom 1: Trägheitsprinzip:<br />
Ein Körper verharrt im Zustand der Ruhe oder gleichmäßiger Translation,<br />
solange die Summe aller auf ihn einwirkenden Kräfte Null ist. Eine<br />
Bewegungsänderung kann nur durch eine äußere Einwirkung herbei<br />
geführt werden.<br />
Axiom 2: Grundsatz der Dynamik<br />
Die Änderung der Bewegung einer Masse ist der Einwirkung der<br />
bewegenden Kraft proportional und geschieht nach der Richtung<br />
derjenigen geraden Linie, nach welcher jene Kraft wirkt.<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
43
Biomechanik: Grundlegende Mechanik<br />
Newton‘sche Axiome<br />
Axiom 3: Reaktionsprinzip:<br />
Kräfte treten immer paarweise auf. Übt ein Körper A auf einen anderen<br />
Körper B eine Kraft aus (actio), so wirkt eine gleichgroße, aber entgegen<br />
gerichtete Kraft von Körper B auf Körper A (reactio).<br />
Bildquelle: http://www2.uni-jena.de/lauflabor/cms/files/Andre_Data/<br />
Teaching/BiomechanikI/Biomechanik%20I_Dynamik.pdf<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Axiom 4: Superposition:<br />
Greifen mehrere Kräfte an einen<br />
Punkt an, addieren diese sich<br />
vektoriell.<br />
44
Biomechanik: Grundlegende Mechanik<br />
Umsetzung der Axiome in der <strong>Modellierung</strong>:<br />
10.02.2009<br />
Verfahren zur Simulation des<br />
Gesamtmodell Mensch:<br />
Mehrkörpersimulation Finite Elemente Methode<br />
Bereich: Kinematik, Dynamik,<br />
inverse Dynamik<br />
Typ: Anfangswertproblem<br />
Bereich: Bewegungen<br />
analysieren<br />
Analytisch: gewöhnliche<br />
DGLn<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Bereich: Elastostatik<br />
Typ: Randwertprobleme<br />
Aufgaben:<br />
Festigkeitsprobleme,<br />
Spannungen, Deformationen<br />
Analytisch: Partielle<br />
Differentialgleichungen<br />
45
Biomechanik: Grundlegende Mechanik<br />
Mehrkörpersysteme:<br />
kinematische Kette mehrerer Starrkörper<br />
Bewegungsgleichungen repräsentieren die Dynamik des<br />
Systems<br />
Vorwärtssimulation:<br />
• Festzulegende Kräfte und Momente wirken zeitabhängig<br />
• Modell wird in der Zeit integriert, um die Bewegung bei<br />
Interaktionen zu synthetisieren<br />
Inverse Dynamik:<br />
• Bewegungsablauf wird als bekannt bzw. gemessen<br />
vorausgesetzt<br />
• Analyse der Daten ergibt die wirkenden inneren und<br />
äußeren Kräfte<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
46
Biomechanik: Grundlegende Mechanik<br />
Finite Elemente Methode:<br />
Diskretisierung der räumlichen Struktur<br />
System wird durch ein System partieller<br />
DGLn beschrieben<br />
Numerische Lösung nach Festlegung von<br />
Randwerten<br />
Speziell für Deformationsmodellierungen<br />
geeignet<br />
Aufgrund der höheren Komplexität im<br />
Vergleich zu MKS Haupteinsatzgebiet<br />
bei Crashsimulationen<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Quelle: FEM- Menschmodell (Uni Leipzig)<br />
47
Biomechanik: Grundlegende Mechanik<br />
Umsetzung der Axiome in der <strong>Modellierung</strong>:<br />
10.02.2009<br />
Verfahren zur Simulation des<br />
Gesamtmodell Mensch:<br />
Mehrkörpersimulation Finite Elemente Methode<br />
Bereich: Kinematik, Dynamik,<br />
inverse Dynamik<br />
Typ: Anfangswertproblem<br />
Bereich: Bewegungen<br />
analysieren<br />
Analytisch: gewöhnliche<br />
DGLn<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Bereich: Elastostatik<br />
Typ: Randwertprobleme<br />
Aufgaben:<br />
Festigkeitsprobleme,<br />
Spannungen, Deformationen<br />
Analytisch: Partielle<br />
Differentialgleichungen<br />
48
Biomechanik: Starrkörper<br />
Definition Starrkörper:<br />
Ein Starrkörper in der Mechanik bezeichnet einen Körper<br />
fester Geometrie, der einen fixen Schwerpunkt und<br />
Trägheitsmoment besitzt.<br />
Rechnerische Behandlung:<br />
Reduktion der Masse auf Schwerpunkt<br />
Position durch Orientierung im Raum klar definiert<br />
10.02.2009<br />
x<br />
z<br />
x1<br />
z1<br />
y<br />
y1<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
49
Biomechanik: Schwabbelmassen<br />
Menschmodelle werden mit Segmenten modelliert, die<br />
zunächst als Starrkörper angenommen werden<br />
Die einzelnen Körperteile verhalten sich aufgrund der<br />
Weichgewebeanteile bei dynamischen Bewegungen nicht so<br />
wie starre Körper<br />
Wichtig bei schnellen Stoß oder Aufprallbewegungen<br />
<strong>Modellierung</strong> der Elastizität über Schwabbelmassen:<br />
Nachbilden des Bewegungsverhaltens von<br />
Weichteilen (Muskel, Bindegewebe)<br />
Elastische Ankopplung an den Starrkörper<br />
Nachschwingen der Weichteile<br />
Starrkörper die elastisch an die anderen Starrkörper<br />
gekoppelt sind<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
50
Biomechanik: Starrkörperketten<br />
Betrachtung des Gesamtmenschen:<br />
<strong>Modellierung</strong> von Starrkörperketten<br />
Massepunkte (Starrkörper), die durch Gelenke<br />
(Zwangsbedingungen) miteinander verbunden sind<br />
Geometrie des Modells wird weniger<br />
berücksichtigt (im Vergleich zur FEM)<br />
Geometrie der Körper fließt über die<br />
definierten Anlenkpunkte in die<br />
Simulation ein<br />
Durchdringung der Körper prinzipiell möglich<br />
Einführen eines Formalismus in Form weiterer Kraftelemente<br />
10.02.2009<br />
Approximation des Menschen als Starrkörperkette auf die<br />
Kräfte wirken<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.gup.uni-linz.ac.at/~gk/Diplom/UFRBD-Helmut.pdf<br />
51
Biomechanik: Kinematische Kette<br />
Kinematische Kette von Starrkörpern:<br />
Eine kinematische Kette ist ein Gebilde aus starren Körpern, die<br />
über Gelenke miteinander verbunden sind. Die Gelenke<br />
verbinden die einzelnen Körper miteinander und reduzieren die<br />
Bewegungsfreiheit der einzelnen starren Körper.<br />
Komplexere Bewegungen der einzelnen Körper<br />
Die Gelenke stellen Randbedingungen aufgrund der durch sie<br />
definierten Zwangskräfte.<br />
Besonderheiten planare Kette:<br />
Die einzelnen Glieder sind so verbunden, dass<br />
• Die Kette keine Verzweigungen hat<br />
• Sich alle Körper nur in einer Ebene bewegen<br />
• Die Gelenke sind als reibungsfreie Scharniergelenke ausgebildet<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
52
Biomechanik: Kinematische Kette<br />
Vereinfachung:<br />
Durch die <strong>Modellierung</strong> als Kinematische Kette aus Starrkörpern<br />
und Gelenken ist es möglich Bewegungen nachzubilden, ohne alle<br />
Gewebetypen separiert komplex zu modellieren<br />
Beliebige Verfeinerung durch Hinzufügen von weiteren<br />
Starrkörpern möglich<br />
10.02.2009<br />
Handmodellierung<br />
grob<br />
Handmodellierung<br />
fein<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
53
Biomechanik: Starrkörper<br />
Restproblematik:<br />
1. Aufstellen der Bewegungsgleichungen problematisch, da<br />
1. Beschreibung der Zwangsbedingungen<br />
2. Abhängigkeiten zwischen den Gelenken<br />
System von Differentialgleichungen<br />
2. Mathematische Lösung der Differentialgleichungen<br />
1. Exakte Lösung meist nicht berechenbar<br />
2. Sehr große Systeme<br />
3. Integration über numerische Methoden<br />
Approximative Lösung<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
54
Biomechanik: Beschreibung Starrkörperkette<br />
Bewegungsbeschreibung eines Starrkörpers:<br />
10.02.2009<br />
m x <br />
..<br />
m y <br />
..<br />
m z <br />
..<br />
.<br />
I xx x y<br />
z<br />
( I yy I zz)<br />
<br />
.<br />
I yy y x<br />
z<br />
( I xx I zz)<br />
<br />
.<br />
I zz<br />
z y<br />
x<br />
( I yy I xx ) <br />
Fx<br />
F<br />
Fz<br />
M<br />
M<br />
M<br />
y<br />
x<br />
y<br />
z<br />
( I )<br />
( II)<br />
( III )<br />
( IV )<br />
( V )<br />
( VI )<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
z<br />
Fx<br />
Fz<br />
y<br />
mit:<br />
Masse: m<br />
Kraftvektor: F<br />
Momentenvektor: M<br />
Trägheitstensor: I<br />
Winkelgeschwindigkeit: <br />
Fy<br />
55
Biomechanik: Beschreibung Starrkörperkette<br />
System aus n Starrkörpern liefert 6n Gleichungen<br />
Unabhängigkeit 6n Freiheitsgrade,<br />
Bei z.B. 15 Segmenten 90 Freiheitsgrade<br />
Real: Kopplung der Gelenke Reduktion der Freiheitsgrade<br />
durch Sperrung<br />
Gelenke: Zwangsbedingungen<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
56
Biomechanik: Starrkörper<br />
Gelenke: Zwangsbedingungen<br />
Berücksichtigung in den Bewegungsgleichungen<br />
Mögliche Ansätze:<br />
<strong>Modellierung</strong> als Kraftelemente. Die Kraft wird aus der<br />
Abweichung von dem Kopplungspunkt berechnet<br />
Zwangsbedingung als tatsächlicher Zwang:<br />
Hinzufügen von zusätzlichen Gleichungen zum Gesamtsystem<br />
1. Eliminiere m Freiheitsgrade 6n – m Gleichungen müssen<br />
über die Zeit integriert werden.<br />
2. Ableitung der Zwangsgleichung<br />
Hinzufügen zu ursprünglichem System<br />
Größeres GLS: Ax=b mit 6n +m Gleichungen<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
57
Biomechanik: Modellbildung 2D / 3D<br />
Unterschiede Modellbildung in 2D und 3D<br />
Real gibt es keine 2D Dynamik<br />
Einige menschliche Bewegungen könne hinreichend genau im 2D<br />
modelliert werden. Beispiel: Flick-Flack, Riesenfelge am Reck<br />
Maschinelle Erstellung der Bewegungsgleichungen<br />
Rechenaufwand in 3D aus informatischer Sicht problemlos<br />
vertretbar<br />
<strong>Biomechanische</strong> Sichtweise:<br />
10.02.2009<br />
Probleme:<br />
1. Unanschauliche Beschreibung von 3D<br />
Rotationen<br />
2. Nichtlinearitäten in den<br />
Bewegungsgleichungen<br />
3. Rückstellverhalten des Segments ist<br />
nicht intuitiv erfassbar<br />
Auftreten von Singularitäten<br />
Abbruch / Probleme bei der Integration<br />
http://www.rzg.mpg.de/~rfs/comas/lectures/SportundPhysik/materialien/Biomechanik/biomechanik.pd<br />
f<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
58
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht<br />
• Definition der einzelnen<br />
Körperbewegungen<br />
10.02.2009<br />
1. 1. Verstehen des<br />
menschlichen Körpers<br />
1. 2. Nachbilden der<br />
körperlichen Strukturen<br />
• Modellbildung für Knochen, Muskeln,<br />
Gelenke<br />
1. 3. Verkettung der Elemente<br />
im Hinblick auf Anwendungsfall<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des aller Gesamtmodells<br />
Komponenten<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Verstehen der menschlichen<br />
Bewegungsabläufe<br />
Nachbilden der Bewegungen<br />
<strong>Modellierung</strong> von Bewegungen durch z.B.<br />
innere oder äußere Anregung der<br />
Muskeln<br />
Simulation<br />
59
Biomechanik: Beschreibung Starrkörperkette<br />
Bewegungsbeschreibung eines Starrkörpers:<br />
10.02.2009<br />
m x <br />
..<br />
m y <br />
..<br />
m z <br />
..<br />
.<br />
I xx x y<br />
z<br />
( I yy I zz)<br />
<br />
.<br />
I yy y x<br />
z<br />
( I xx I zz)<br />
<br />
.<br />
I zz<br />
z y<br />
x<br />
( I yy I xx ) <br />
Fx<br />
F<br />
Fz<br />
M<br />
M<br />
M<br />
y<br />
x<br />
y<br />
z<br />
( I )<br />
( II)<br />
( III )<br />
( IV )<br />
( V )<br />
( VI )<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
z<br />
Fx<br />
Fz<br />
y<br />
mit:<br />
Masse: m<br />
Kraftvektor: F<br />
Momentenvektor: M<br />
Trägheitstensor: I<br />
Winkelgeschwindigkeit: <br />
Fy<br />
60
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Lösung<br />
Zur Simulation ist die Berechnung der Bewegungstrajektorien<br />
notwendig: Lösung des Gleichungssystems<br />
Numerische Lösung der aufgestellten Bewegungsgleichungen<br />
Ziel:<br />
Zu einer Initialen Position, Kraft soll die weitere Bewegung simuliert<br />
werden.<br />
Problem:<br />
Bestimmung von Anfangswerten: Es muss eine geeignete Startposition<br />
der einzelnen Körperelemente gewählt werden. Festgelegt werden<br />
muss auch, ob sicher der Körper in Ruhe befindet. In diesem Fall muss<br />
eine externe Kraft einwirken, da ansonsten keine Bewegungsänderung<br />
zu erwarten ist. (Axiome der Mechanik)<br />
Mathematisch gesehen ergibt sich die Lösung aus Integration des<br />
Anfangswertproblems<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
61
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Numerische Integration<br />
Eigenschaften und Merkmale der numerischen Löser::<br />
Die numerischen Lösungsverfahren werden insbesondere durch folgende<br />
Parameter charakterisiert:<br />
Anzahl der Funktionswertberechnungen für den Integranden<br />
Strategie der Berechnung (Anzahl der Operation fix / variabel)<br />
Festlegung der Schrittweiten für die Integrationsschritte<br />
(fest, variabel)<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
62
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Numerische Integration<br />
Standardverfahren zur Lösung gewöhnlicher Anfangswertprobleme:<br />
Die Unterschiede der Verfahren liegen in der unterschiedlichen<br />
Approximation der Integralfläche,<br />
D.h. Verfahren der numerischen Quadratur maßgeblich für<br />
Genauigkeit<br />
Die Auswertung erfolgt jeweils an unterschiedlichen Stützstellen bzw.<br />
mit unterschiedlicher Gewichtung<br />
10.02.2009<br />
Verfahren<br />
Euler-Cauchy Verfahren n. Heun Runge-Kutta Verfahren<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
63
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Numerische Integration<br />
Problem:<br />
Die Standardverfahren zur Lösung gewöhnlicher Anfangswertprobleme<br />
lösen Differentialgleichungen 1. Ordnung<br />
Bewegungsgleichungen<br />
Die werden aufgrund der Beschleunigung immer durch<br />
Differentialgleichungen 2. Ordnung beschrieben. n<br />
Differentialgleichungen 1. Ordnung<br />
Ansatz<br />
Reduktion der DGL auf eine Gleichung 1. Ordnung durch Substitution<br />
10.02.2009<br />
y’’(x) = f(x,y(x),y’(x))<br />
Standardverfahren auch für Systeme 2. Ordnung einsetzbar<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
64
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Numerische Integration<br />
Form Anfangswertproblem allgemein: Gewöhnliche<br />
Differentialgleichung ( Ableitungen nur im Ort)<br />
10.02.2009<br />
Form Anfangswertproblem bezogen auf<br />
Bewegungsgleichungen<br />
Beschleunigung stellte Komponente<br />
2. Ordnung dar<br />
Gleichungssystem (Gleichungen für jeden<br />
Starrkörper)<br />
Nichtlineares Differentialgleichungssystem 2. Ordnung<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
65
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Euler Verfahren<br />
Euler Verfahren: Einfachste Näherung<br />
Annahme: Der Funktionsverlauf ist zwischen zwei Stützstellen immer<br />
konstant und kann durch den Funktionswert am linken Rand<br />
approximiert werden.<br />
Es gilt allgemein:<br />
Als Integrationsformel ergibt sich<br />
Die Lösung ergibt sich als Polygonzug<br />
Der Fehler der ersten Approximation setzt sich, da hierauf die<br />
Anfangswerte für den zweiten Schritt beruhen fort (Steigungsfehler)<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
66
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Numerische Integration<br />
Stärken und Schwächen des Euler-Cauchy Verfahrens:<br />
Vorteile:<br />
+ sehr einfache Berechnung<br />
+ geringer Speicherplatzbedarf<br />
+ nur vorheriger Wert wird<br />
benötigt<br />
10.02.2009<br />
Nachteile:<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
+ einfachste<br />
Berechnungsmöglichkeit<br />
+ Fehler in einem Schritt fließt<br />
in die Folgeschritte mit ein<br />
+ Verstärkung der Fehler:<br />
Quadraturfehler<br />
67
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Numerische Integration<br />
Verfahren höherer Ordnungen:<br />
Verfahren nach Heun:<br />
Berechnung der Integralfläche über Trapetzregel<br />
Auswertung an Anfangswert und geschätzter Stützstelle<br />
Schätzung des Funktionswert an der Stützstelle über Euler<br />
Runge-Kutta Verfahren:<br />
Es wird noch eine zusätzliche Stützstelle auf dem<br />
Intervall angenommen<br />
Funktionswerte werden wieder geschätzt<br />
Integralfläche wird jeweils aus den Werten der festen und der<br />
geschätzten Stützstellen ermittelt Höhere Konvergenzordnung<br />
Ideal: Adaptive Schrittweitensteuerung<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
68
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht<br />
Generierung und<br />
Umsetzung<br />
innerhalb von<br />
Softwarepaketen:<br />
Menschmodelle<br />
10.02.2009<br />
Verstehen der menschlichen<br />
Bewegungsabläufe<br />
Nachbilden der Bewegungen<br />
Simulation<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
69
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht Menschmodelle<br />
Menschmodelle: Umsetzung in der Praxis:<br />
Geometrische <strong>Modellierung</strong> sehr präzise, feine<br />
Untergliederungen möglich<br />
Dynamische Abbildung von Prozessen realisierbar<br />
Kraftanalysen<br />
Deformationsanalysen<br />
Restprobleme der bestehenden Lösungen, nur partiell<br />
umsetzbar<br />
Kognitive Eigenschaften<br />
Psychophysische Probleme<br />
Aspekte die gerade das menschliche Handeln ausmachen<br />
• Aufbau eines Gesamtmodells<br />
sind nicht vollständig abbildbar<br />
• Zusammenspiel des Gesamtmodells<br />
(Handeln aufgrund von Erfahrung, Bauchgefühl, etc.)<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
70
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht Menschmodelle<br />
Menschmodelle:<br />
Grundmodelle existieren als kommerzielle Softwarelösungen<br />
Integrierte Anthropometrische Menschmodelle<br />
Je nach Entwicklerteam speziell für Anwendungsfälle<br />
konzipert<br />
Können als Grundlage weiterer Forschungsarbeiten dienen<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
71
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht Menschmodelle<br />
Modelle werden tlw. kommerziel als Forschungsgrundlage<br />
angeboten<br />
AnyBody EM-<br />
Human<br />
• AnyBody<br />
Technologies<br />
• Dänemark<br />
10.02.2009<br />
• Human<br />
Solutions<br />
Inselansätze<br />
• spezialisierte<br />
Einzellösungen<br />
Digitale Menschmodelle<br />
Human-<br />
Builder<br />
• IBM • Tecnomatic<br />
Santos<br />
• Militär<br />
• nicht publiziert<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
Jack Ramsis Safe- Safework<br />
• Human<br />
Solutions<br />
Anthrophos<br />
• Militär<br />
• Vertrieb<br />
eingestellt<br />
• Safework:<br />
Human Modeling<br />
Technologis<br />
72
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht<br />
Eigenschaften der digitalen Menschmodelle:<br />
Innerer Aufbau in Skelettstruktur<br />
Äußerer Aufbau mit Hautschicht<br />
Unterschiedlich starke Vereinfachungen<br />
Aufbauend auf anthropometrischer Datenbank <br />
Änderung der Kennwerte möglich<br />
Neue Modelle integrieren Muskeln, Kleidung, Vitalwerte<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
73
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Übersicht<br />
Einsatzgebiete der digitalen Menschmodelle:<br />
Körperhaltungsanalysen<br />
Ergonomie von Fertigungsprozessen<br />
Kraftanalysen<br />
Crash-Test<br />
Ermittlung der Dauer von Arbeitsabläufen<br />
(Methods-Time-Measurement)<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
74
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Menschmodelle<br />
AnyBody:<br />
AnyBody Modelling System<br />
Muskel-Skelett- System des Gesamt oder<br />
Teilkörpers<br />
Soffwechsel, Muskelreaktionen, Mechanische Kräfte<br />
auf Basis einer festgelegten Bewegung<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Statische und<br />
dynamische Modelle<br />
3D Modell<br />
Einsatz: Sport,<br />
Reha, Ergonomie,<br />
Prothetik<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.anybodytech.com<br />
75
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Menschmodelle<br />
Jack:<br />
Ergonomiestudien zu Produkten<br />
und Arbeitsplätzen<br />
Test vor Fertigung von Prototypen<br />
möglich<br />
quantitatives Feedback zu Verletzungsrisiko,<br />
Belastungsfähigkeit, Analyse der<br />
Körperhaltung, Ermüdung, Timing<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Ablauf:<br />
- <strong>Modellierung</strong> der Umgebung<br />
- Virtueller Mensch<br />
- Einbindung des Menschen in die<br />
Umgebung<br />
- Zuweisung von Aufgaben<br />
- Leistungsanalyse<br />
http://www.ugsplm.de/pdf/ueber_uns/material/tecnomatix/Jack_Human.pdf<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
76
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Menschmodelle<br />
Ramsis:<br />
Meist eingesetzt Mensch-Modell<br />
Bei 70 % der Automobilhersteller im Einsatz<br />
CAD Tool z.B. integrierbar in CATIA<br />
Haupteinsatz: Ergonomie im Fahrzeug<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Ermittlung von Bewegungsräumen<br />
Einbindung von<br />
Restriktionen über Nebenbedingungen<br />
Unterschiedliche Anthropomatische Modell<br />
(Kindmodell, verschiedene Altersstufen<br />
und Typen)<br />
Erweiterung der Datenbank, flexible<br />
Modelle<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.human-solutions.com<br />
77
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Anwendung<br />
Simulation am Beispiel von RAMSIS:<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.iaw.rwth-aachen.de/<br />
78
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Anwendung<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.iaw.rwth-aachen.de/<br />
79
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Menschmodelle<br />
eM-Human:<br />
Simulation von Arbeitsplätzen<br />
Menschmodell Ramsis ist integrierbar<br />
Makros für Greif und Laufbewegungen integriert<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Kollisionserkennung, Körperbalance<br />
Ziel: Verkürzung von<br />
Produktionsprozessen, Ergonomie am<br />
Arbeitsplatz<br />
Durch die Einbindung des Ramsis-Modell<br />
in die Em-Human Umgebung Verknüpfung<br />
wesentlicher Ansätze<br />
http://www.human-solutions.com/download/pdf/eMPower_Ramsis_de.pdf<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
80
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Menschmodelle<br />
SafeWork:<br />
Menschmodell in CAD Umgebung<br />
Hauptanwendungsgebiet:<br />
Produktgestaltung / Fahrzeuge<br />
Statistische <strong>Modellierung</strong><br />
Analysen:<br />
Sehen, Erreichen, Haltung, Bewegung<br />
Kraft- und Leistungsanalyse<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Unterschiedliche Modellgrößen m/w<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.safework.com/safework_pro/features.html#<br />
81
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Menschmodelle<br />
Arbeitsabläufe innerhalb der Modelle<br />
Auswahl der Grundmodell:<br />
Realisiert über Datenbank etc.<br />
Bestimmung der Aufgabe und des Umweltszenarios:<br />
Vordefinition bestimmter Tätigkeiten<br />
Charakteristische Anregungsparameter<br />
Simulation:<br />
Anregung des Menschmodells, Auswertung der<br />
gemessenen Kräfte und Bewegungen<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.human-solutions.com<br />
82
<strong>Biomechanische</strong> <strong>Modellierung</strong>: Menschmodelle<br />
Im Allgemeinen Black-Boxmodelle d.h.<br />
• Aufbau eines Gesamtmodells<br />
• Zusammenspiel des Gesamtmodells<br />
10.02.2009<br />
Graphische Benutzeroberfläche<br />
Mit Auswahl der Tätigkeit / Bewegung und<br />
Anfangszustände werden die zu lösenden Gleichungen<br />
automatisiert aufgestellt<br />
Numerische Lösung der Gleichungen im System<br />
Arbeitsabläufe innerhalb der Modelle:<br />
Aufstellung des Gesamtgleichungssystems über Freischneiden der<br />
Kräfte ( VL 2)<br />
Analytische Lösung meist nicht möglich<br />
Numerische Löser werden eingesetzt<br />
Analyse und <strong>Modellierung</strong> menschlicher Bewegungsabläufe<br />
Dr. A. Wörner / Prof. Dr. T. Schultz<br />
http://www.safework.com/safework_pro/features.html#<br />
83