ERGEBNISSE TECHNISCHE MECHANIK III-IV - Lehrstuhl für ...
ERGEBNISSE TECHNISCHE MECHANIK III-IV - Lehrstuhl für ...
ERGEBNISSE TECHNISCHE MECHANIK III-IV - Lehrstuhl für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1. Aufgabe: (20 Punkte)<br />
<strong>ERGEBNISSE</strong><br />
<strong>TECHNISCHE</strong> <strong>MECHANIK</strong> <strong>III</strong>-<strong>IV</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> Technische Mechanik, TU Kaiserslautern<br />
01<br />
01<br />
01<br />
A<br />
ϕ<br />
ωAB<br />
l<br />
SS 10, 16.08.2010<br />
l<br />
B<br />
C<br />
r<br />
00 11<br />
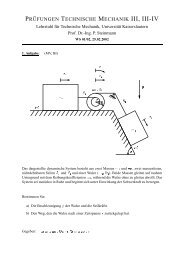
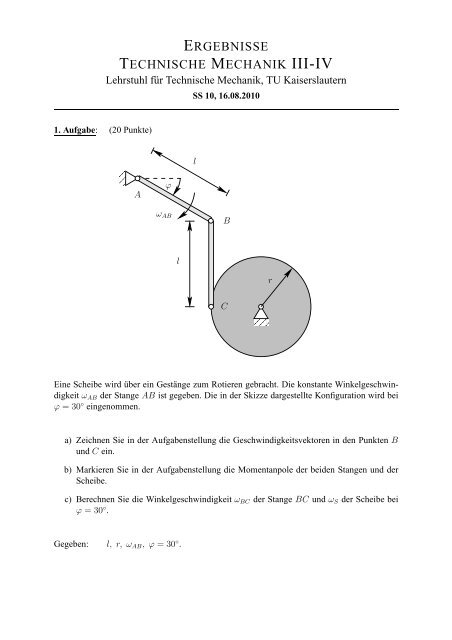
Eine Scheibe wird über ein Gestänge zum Rotieren gebracht. Die konstante Winkelgeschwindigkeit<br />
ωAB der Stange AB ist gegeben. Die in der Skizze dargestellte Konfiguration wird bei<br />
ϕ = 30 ◦ eingenommen.<br />
a) Zeichnen Sie in der Aufgabenstellung die Geschwindigkeitsvektoren in den Punkten B<br />
und C ein.<br />
b) Markieren Sie in der Aufgabenstellung die Momentanpole der beiden Stangen und der<br />
Scheibe.<br />
c) Berechnen Sie die Winkelgeschwindigkeit ωBC der Stange BC und ωS der Scheibe bei<br />
ϕ = 30 ◦ .<br />
Gegeben: l, r, ωAB, ϕ = 30 ◦ .
a)<br />
b)<br />
c)<br />
MI<br />
01<br />
01<br />
A<br />
01<br />
01<br />
01<br />
A<br />
ϕ<br />
ωAB<br />
ϕ<br />
ωAB<br />
vB<br />
.<br />
vB<br />
B<br />
C<br />
vC<br />
.<br />
vC<br />
B<br />
C<br />
M<strong>III</strong><br />
00 11<br />
r<br />
000 111<br />
MII
2. Aufgabe: (20 Punkte)<br />
Θ2<br />
x<br />
R2<br />
m3<br />
00 11<br />
00 11<br />
ϕ2<br />
r2<br />
Das dargestellte System besteht aus zwei Walzen (m1, r1; Θ2, R2, r2) und einer Masse m3, die<br />
über Seile miteinander verbunden sind. Die Seile sind dehnstarr und masselos. Das System sei<br />
zunächst in Ruhe und beginne sich unter einem konstanten Moment M0 zu bewegen.<br />
a) Zeichnen Sie alle relevanten Freikörperbilder.<br />
b) Bestimmen Sie die kinematischen Beziehungen zwischen den gegebenen Koordinaten.<br />
c) Stellen Sie die dynamischen Gleichungen auf.<br />
d) Berechnen Sie die Beschleunigung ¨x der Masse m3.<br />
e) Bestimmen Sie die Seilkräfte.<br />
f) Bestimmen Sie die Geschwindigkeit und die Strecke der Masse m3 zum Zeitpunkt t = 20.<br />
Gegeben: r1 = 2 r, r2 = 3 r, R2 = 5 r; m1 = 2 m, m3 = 5 m;<br />
Θ2 = 80 m r 2 ; M0 = 20 m g r; g.<br />
r1<br />
00 11<br />
00 11<br />
ϕ1<br />
g<br />
m1<br />
M0
a) Freikörperbilder<br />
x<br />
<strong>III</strong><br />
ω2<br />
S2<br />
G3<br />
b) x = 6<br />
5 r ϕ1 = 3 r ϕ2, ϕ1 = 5<br />
2 ϕ2<br />
c) <br />
A : M0 − S1 r1 = Θ1 ¨ϕ1<br />
<br />
B : S1R2 − S2r2 = Θ2 ¨ϕ2<br />
↑ : m3¨x = S2 − G3<br />
v<br />
S2<br />
By<br />
00 11<br />
00 11<br />
d) a = 1 M0 3<br />
−<br />
20 mr 10 g, mit M0 = 20mgr, a = 0, 7 g<br />
e) S1 = 8 5<br />
6 m g , S2 = 8 1<br />
m g<br />
2<br />
II<br />
f) v(t) = 0, 7 g t, v(20) = 14 g [m/s]<br />
x(t) = 0, 7 g t2<br />
, x(20) = 140 g [m]<br />
2<br />
G2<br />
Bx<br />
S1<br />
S1<br />
Ay<br />
00 11<br />
00 1101<br />
G1<br />
I<br />
g<br />
M0<br />
ω1<br />
Ax
3. Aufgabe: (20 Punkte)<br />
ω<br />
m<br />
3<br />
y<br />
x<br />
2 m<br />
Mit dem Hammer aus der Skizze, der im Abstand h vom Hammerkopf in der Hand (gelenkiges<br />
Lager) gehalten wird, wird mit der konstanten Winkelgeschindigkeit ω0 auf eine frei bewegliche<br />
ruhende Kugel geschlagen.<br />
ω0<br />
a) Bestimmen Sie das Massenträgheitsmoment des Hammers bezogen auf dessen Schwerpunkt.<br />
Betrachten Sie dazu den Hammerkopf als Punktmasse.<br />
b) Für h = l<br />
und e = 0.5 bestimmen Sie die Geschwindigkeit ¯<br />
2 vK der Kugel und die<br />
Winkelgeschwindigkeit ¯ω des Hammers unmittelbar nach dem Stoß. Betrachten Sie dazu<br />
die Kugel als Punktmasse.<br />
c) Bestimmen Sie den Abstand h der Hand vom Hammerkopf so, dass keine Stoßkraft in<br />
der Hand entsteht.<br />
Gegeben: m, l, ω0, e, h.<br />
m<br />
l<br />
h
a) Θs = 1<br />
4 ml2<br />
b) ¯vK = − 21 13<br />
ωl, ¯ω =<br />
32 16 ω<br />
c) h = 2<br />
3 l
4. Aufgabe: (30 Punkte)<br />
O ϕ m1<br />
c<br />
l l l<br />
Ein homogener Balken (Länge 3l, Masse m1) ist in der statischen Ruhelage (ϕ = 0) im Punkt<br />
O gelenkig gelagert und mit einer Feder c und einem Dämpfer d an den skizzierten Stellen<br />
verbunden. Der Balken wird über eine massenlose Umlenkrolle durch die Masse m2 um den<br />
Winkel ϕ = ϕ0 ausgelenkt. Das Seil wird zum Zeitpunkt t = 0 durchgeschnitten. Das gesamte<br />
System befindet sich unter dem Einfluss der Erdbeschleunigung g.<br />
Bestimmen Sie <strong>für</strong> kleine Auslenkungen ϕ:<br />
a) Die Anfangsauslenkung ϕ0.<br />
b) Die Differentialgleichung des frei schwingenden Balkens.<br />
c) Das Lehrsche Dämpfungsmaß D und die gedämpfte Eigenfrequenz ωd.<br />
d) Bestimmen Sie <strong>für</strong> folgende Fälle:<br />
1. Schwach gedämpft: Die Lösung der Bewegungsgleichung mit Amplitude und<br />
Phasengang.<br />
2. Aperiodischer Grenzfall: Die Lösung der Bewegungsgleichung.<br />
Zusatzaufgabe zu 2.: Nach welcher Zeit t klingt die Bewegung ϕ(t) auf 10 %<br />
der Anfangsauslenkung ϕ0 ab? (Angabe ohne Nachkommommastelle ist ausreichend).<br />
Gegeben: m1, m2, c, d, l, g.<br />
d<br />
m2<br />
g
a) ϕ0 = 3m2g<br />
cl<br />
b) 3m1 ¨ϕ + 4d ˙ϕ + cϕ = 0<br />
c)<br />
D = 2d√3m1c , ωd =<br />
3m1c<br />
O<br />
O<br />
d1) ϕ(t) = Ce −δt cos(ωdt − β)<br />
β = arctan( δ<br />
ωd<br />
), δ = 2d<br />
3m1<br />
d2) ϕ(t) = (ϕ0 + δϕ0t)e −δt<br />
Zusatzaufgabe:<br />
1<br />
≤ (1 + δt)e−δt<br />
10<br />
t > 4<br />
δ<br />
ϕ0<br />
ϕ<br />
Ff<br />
Ff<br />
√ 3m1c − 4d 2<br />
3m1<br />
, C = ϕ0<br />
cos(β)<br />
Fd<br />
m2g
5. Aufgabe: (40 Punkte)<br />
y<br />
α<br />
l<br />
x<br />
β<br />
Ein Doppelpendel besteht aus zwei massenlosen Stäben (Länge l) und einer Punktmasse (Masse<br />
m) welche am Ende des zweiten Stabes befestigt ist. Das Doppelpendel sei im Koordinatenursprung<br />
x − y gelagert und befinde sich unter dem Einfluss der Erdbeschleunigung g.<br />
Bestimmen Sie in Abhängigkeit des Koordinatensystems x − y und der Winkel α und β:<br />
a) Die Lagrangefunktion.<br />
b) Die Bewegungsgleichungen.<br />
c) Die linearen Bewegungsgleichungen <strong>für</strong> kleine Auslenkungen von α und β.<br />
d) Die Eigenfrequenz <strong>für</strong> kleine Auslenkungen.<br />
Gegeben: m, l, g.<br />
Hinweis: cos(α ± β) = cosαcosβ ∓ sin α sin β<br />
l<br />
g<br />
m
a) L = 1<br />
2 ml2 ( ˙α 2 + ˙ β 2 + 2 ˙α ˙ β cos(α − β)) + mgl(cosα + cos(β))<br />
b) ml 2 (¨α + ¨ βcos(α − β) − ˙ βsin(α − β)( ˙α − ˙ β)) + ml 2 ˙α ˙ β sin(α − β) + mgl sin(α) = 0<br />
ml 2 ( ¨ β + ¨αcos(α − β) − ˙αsin(α − β)( ˙α − ˙ β)) − ml 2 ˙α ˙ β sin(α − β) + mgl sin(β)<br />
c) l¨α + l ¨ β + gα = 0<br />
l¨α + l ¨ β + gβ = 0<br />
d) ω =<br />
g<br />
2l