Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...
Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...
Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
!<br />
Algorithm GridLocalization( {p k,t-1}, u t, z t, m):<br />
!=0<br />
for all Gitterpunkte k do<br />
" ""<br />
endfor<br />
for all Gitterpunkte k do<br />
endfor<br />
return {p k,t }<br />
p k,t = p(z t | x k,m) p k,t<br />
Algorithmus<br />
Wahrscheinlichkeitsgitter:<br />
Zu jedem Gitterpunkt k,<br />
wird die <strong>Lokalisierung</strong>swahrscheinlichkeit<br />
abgespeichert.<br />
x k ist die<br />
Roboterposition für<br />
den Gitterpunkt k<br />
Bewegungsmodell:<br />
p(x k |u t ,x i ) ist die<br />
Wahrscheinlichkeit, dass<br />
sich mit dem Steuerbefehl u t<br />
<strong>der</strong> Roboter von x i nach x k<br />
bewegt.<br />
Sensormodell:<br />
P(z t |x k ,m) ist die<br />
Wahrscheinlichkeit, dass an<br />
<strong>der</strong> Position x k die<br />
Sensordaten z t beobachtet<br />
werden.<br />
O. Bittel; SS 2013 Mobile Roboter - <strong>Gitterbasierte</strong> <strong>Lokalisierung</strong> 6-3<br />
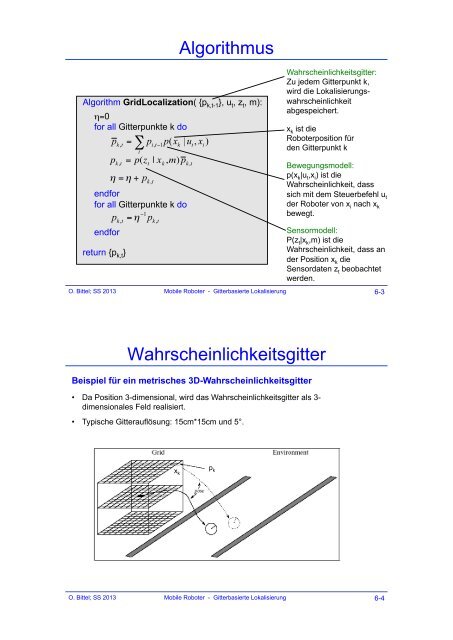
Wahrscheinlichkeitsgitter<br />
Beispiel für ein metrisches 3D-Wahrscheinlichkeitsgitter<br />
• Da Position 3-dimensional, wird das Wahrscheinlichkeitsgitter als 3dimensionales<br />
Feld realisiert.<br />
• Typische Gitterauflösung: 15cm*15cm und 5°.<br />
x k<br />
p k<br />
O. Bittel; SS 2013 Mobile Roboter - <strong>Gitterbasierte</strong> <strong>Lokalisierung</strong> 6-4