Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...
Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...
Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
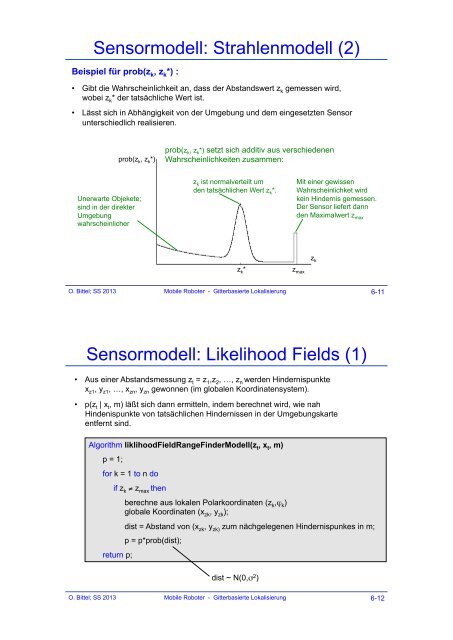
Sensormodell: Strahlenmodell (2)<br />
Beispiel für prob(z k, z k*) :<br />
• Gibt die Wahrscheinlichkeit an, dass <strong>der</strong> Abstandswert z k gemessen wird,<br />
wobei z k * <strong>der</strong> tatsächliche Wert ist.<br />
• Lässt sich in Abhängigkeit von <strong>der</strong> Umgebung und dem eingesetzten Sensor<br />
unterschiedlich realisieren.<br />
prob(z k , z k *)<br />
Unerwarte Objekete;<br />
sind in <strong>der</strong> direkter<br />
Umgebung<br />
wahrscheinlicher<br />
prob(z k , z k *) setzt sich additiv aus verschiedenen<br />
Wahrscheinlichkeiten zusammen:<br />
z k ist normalverteilt um<br />
den tatsächlichen Wert z k *.<br />
z k* z max<br />
Mit einer gewissen<br />
Wahrscheinlichket wird<br />
kein Hin<strong>der</strong>nis gemessen.<br />
Der Sensor liefert dann<br />
den Maximalwert z max<br />
O. Bittel; SS 2013 Mobile Roboter - <strong>Gitterbasierte</strong> <strong>Lokalisierung</strong> 6-11<br />
Sensormodell: Likelihood Fields (1)<br />
• Aus einer Abstandsmessung z t = z 1,z 2, …, z n werden Hin<strong>der</strong>nispunkte<br />
x z1 , y z1 , …, x zn , y zn gewonnen (im globalen Koordinatensystem).<br />
• p(z t | x t, m) läßt sich dann ermitteln, indem berechnet wird, wie nah<br />
Hindenispunkte von tatsächlichen Hin<strong>der</strong>nissen in <strong>der</strong> Umgebungskarte<br />
entfernt sind.<br />
Algorithm liklihoodFieldRangeFin<strong>der</strong>Modell(z t, x t, m)<br />
p = 1;<br />
for k = 1 to n do<br />
if z k % z max then<br />
return p;<br />
berechne aus lokalen Polarkoordinaten (z k ,& k )<br />
globale Koordinaten (x zk, y zk);<br />
dist = Abstand von (x zk , y zk) zum nächgelegenen Hin<strong>der</strong>nispunkes in m;<br />
p = p*prob(dist);<br />
dist ~ N(0,' 2 )<br />
O. Bittel; SS 2013 Mobile Roboter - <strong>Gitterbasierte</strong> <strong>Lokalisierung</strong> 6-12<br />
z k