Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...
Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...
Teil 6: Gitterbasierte Lokalisierung Idee der gitterbasierten ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
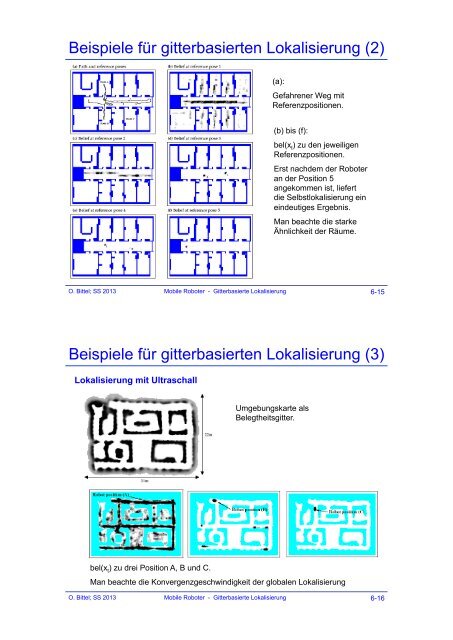
Beispiele für <strong>gitterbasierten</strong> <strong>Lokalisierung</strong> (2)<br />
O. Bittel; SS 2013 Mobile Roboter - <strong>Gitterbasierte</strong> <strong>Lokalisierung</strong> 6-15<br />
(a):<br />
Gefahrener Weg mit<br />
Referenzpositionen.<br />
(b) bis (f):<br />
bel(x t ) zu den jeweiligen<br />
Referenzpositionen.<br />
Erst nachdem <strong>der</strong> Roboter<br />
an <strong>der</strong> Position 5<br />
angekommen ist, liefert<br />
die Selbstlokalisierung ein<br />
eindeutiges Ergebnis.<br />
Man beachte die starke<br />
Ähnlichkeit <strong>der</strong> Räume.<br />
Beispiele für <strong>gitterbasierten</strong> <strong>Lokalisierung</strong> (3)<br />
<strong>Lokalisierung</strong> mit Ultraschall<br />
bel(x t ) zu drei Position A, B und C.<br />
Umgebungskarte als<br />
Belegtheitsgitter.<br />
Man beachte die Konvergenzgeschwindigkeit <strong>der</strong> globalen <strong>Lokalisierung</strong><br />
O. Bittel; SS 2013 Mobile Roboter - <strong>Gitterbasierte</strong> <strong>Lokalisierung</strong> 6-16