3 Vektoren im Koordinatensystem - FOS und BOS
3 Vektoren im Koordinatensystem - FOS und BOS
3 Vektoren im Koordinatensystem - FOS und BOS

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3. <strong>Vektoren</strong> <strong>im</strong> <strong>Koordinatensystem</strong><br />
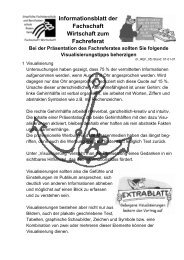
3.1 Ortsvektoren<br />
Im folgenden liege stets ein dreid<strong>im</strong>ensionales kartesisches <strong>Koordinatensystem</strong> zugr<strong>und</strong>e. Die drei Koordinaten-<br />
achsen verlaufen rechtwinklig zueinander <strong>und</strong> bilden ein Rechtssystem (Dreifingerregel der rechten Hand).<br />
Eine Verallgemeinerung für D<strong>im</strong>ensionen größer als 3 ist zwar unanschaulich, aber formal leicht durchführbar.<br />
Im zweid<strong>im</strong>ensionalen Vektorraum (Ebene) hat jeder Vektor 2 Koordinaten, das <strong>Koordinatensystem</strong> zwei Ach-<br />
sen.<br />
x1<br />
x3<br />
!<br />
Unter dem Ortsvektor eines Punktes A(a;a;a)<br />
1 2 3 versteht man den Vektor a vom Koordinatenursprung<br />
O(0;0;0)<br />
zu A.<br />
Achtung! Ortsvektoren sind keine <strong>Vektoren</strong> <strong>im</strong> Sinne von §1, sondern „geb<strong>und</strong>ene <strong>Vektoren</strong>“.<br />
3.2 Basisvektoren<br />
"! "" !<br />
Die Ortsvektoren e , e <strong>und</strong> e der Punkte (1;0;0), (0;1;0) <strong>und</strong> (0;0;1) sind offensichtlich linear unabhängig<br />
""!<br />
1<br />
2<br />
<strong>und</strong> damit eine Basis des dreid<strong>im</strong>ensionalen Vektorraums. Jeder Ortsvektor von A (a;a;a) lässt sich daher<br />
schreiben als a2<br />
2<br />
. Basisvektoren sind , <strong>und</strong><br />
e<br />
""<br />
+ + e 3<br />
"!<br />
⎛a1⎞ ⎛1⎞ ⎛0⎞ ⎛0⎞ "! ! " ⎜ ⎟<br />
"! ⎜ ⎟ ""! ⎜ ⎟ ""! ⎜ ⎟<br />
ae 1 1 a3 =<br />
⎜<br />
a2⎟<br />
e1= ⎜<br />
0<br />
⎟<br />
e2=<br />
⎜<br />
1<br />
⎟<br />
e3= ⎜⎜<br />
0<br />
⎟<br />
⎜a⎟ ⎜ 1⎟<br />
⎝ 3 ⎠<br />
0⎟<br />
⎜<br />
⎝ ⎠ 0⎟<br />
⎝ ⎠ ⎝ ⎠<br />
⎛0⎞ ⎜ ⎟<br />
Der Nullvektor ist<br />
⎜<br />
0<br />
⎟<br />
.<br />
⎜0⎟ ⎝ ⎠<br />
3.3 Rechenregeln<br />
I)<br />
II)<br />
⎛a1⎞ ⎛b1⎞ ⎛a1 ± b1<br />
⎞<br />
! ! ⎜ ⎟ ⎜ ⎟ ⎜ ⎟<br />
a± b = a ± b = a ± b<br />
⎜ 2⎟ ⎜ 2⎟ ⎜ 2 2⎟<br />
⎜a ⎟ ⎜<br />
3 b ⎟ ⎜<br />
3 a3 b ⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ± 3 ⎠<br />
⎛a1⎞ ⎛λa1⎞<br />
! ⎜ ⎟ ⎜ ⎟<br />
λ⋅ a =λ⋅<br />
⎜<br />
a2⎟ =<br />
⎜<br />
λa2⎟<br />
⎜a ⎟ ⎜ ⎟<br />
⎝ 3⎠ ⎝λa3⎠<br />
3<br />
- 3 -<br />
x2<br />
1 2 3
"""!<br />
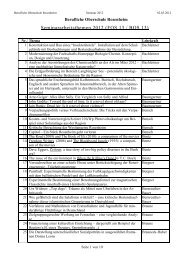
III) Der Vektor AB ist der Verbindungsvektor der Punkte A <strong>und</strong> B.<br />
! """! ! ! """! ! !<br />
Es gilt: a+ A B−b<br />
= 0⇒ AB= b−a Aufgaben:<br />
S. 241/16, S. 245/22,23, S. 249/30. S. 251/33<br />
Mündlich: S. 252/38<br />
a !<br />
A<br />
b !<br />
"""!<br />
AB<br />
3.4 Lineare Unabhängigkeit von Spaltenvektoren<br />
B<br />
! ! ! ! !<br />
Zwei <strong>Vektoren</strong> a <strong>und</strong> b sind linear unabhängig, falls gilt: λ 1a+λ 2b = 0⇔λ 1 =λ 2 = 0.<br />
Daraus ergibt sich:<br />
Zwei <strong>Vektoren</strong> a <strong>und</strong><br />
!<br />
b ! ! !<br />
sind linear abhängig, falls gilt: a = k⋅b mit k ∈R \{0} .<br />
Aufgaben: S. 274/25, S. 275/27a,b, S. 278/34, S. 287/45<br />
! ! ! ! ! ! !<br />
Drei <strong>Vektoren</strong> a , b <strong>und</strong> c sind linear unabhängig, falls gilt: λ 1a+λ 2b+λ 3c= 0⇔λ 1 =λ 2 =λ 3 = 0<br />
Das Gleichungssystem mit den Unbekannten 1 λ , 2 λ <strong>und</strong> 3<br />
(enthält die Vektorkoordinaten) des Gauß-Verfahrens hat dann den Rang 3.<br />
Aufgaben: S. 275/27c – i, 28, 29, S. 287/46, 47<br />
3.5 Determinanten <strong>und</strong> lineare Gleichungssysteme<br />
3.5.1 Zweireihige Determinanten<br />
λ ist dann eindeutig lösbar. Die Koeffizientenmatrix<br />
Im folgenden soll eine „Lösungsformel“ für ein lineares Gleichungssystem mit 2 Gleichungen <strong>und</strong> 2 Unbekann-<br />
ten hergeleitet werden.<br />
Allgemeine Form eines derartigen System <strong>und</strong> seine allgemeine Lösung:<br />
I) a ⋅ x + b ⋅ y = c<br />
1 1 1<br />
II) a ⋅ x + b ⋅ y = c<br />
2 2 2<br />
I) ⋅b−II) ⋅b<br />
2 1<br />
cb − cb<br />
ab 1 2⋅x−ab 2 1⋅ x= cb 1 2 −cb 2 1 ⇔ x=<br />
ab − ab<br />
II) ⋅a−I) ⋅a<br />
1 2<br />
1 2 2 1<br />
1 2 2 1<br />
ac 1 2−ac 2 1<br />
ab 1 2⋅y−ab 2 1⋅ y= ac 1 2 −ac 2 1 ⇔ y=<br />
ab − ab<br />
1 2 2 1<br />
Definition: Für beliebige Zahlen a, b, c, d heißt<br />
a b<br />
ad − bc = : zweireihige Determinante.<br />
c d<br />
a1 b1<br />
c1 b1<br />
a1 c1<br />
Setzt man für das allgemeine Gleichungssystem D: = , D x : = , D y : = , so lässt sich die<br />
a b c b a c<br />
2 2<br />
x<br />
allgemeine Lösung kurz schreiben:<br />
D Dy<br />
x = ; y = (Cramersche Regel)<br />
D D<br />
Insbesondere gilt:<br />
1) Ist D ≠ 0,<br />
so ist das Gleichungssystem eindeutig lösbar.<br />
2 2<br />
2a) Ist D 0 <strong>und</strong> D ≠ 0 oder (<strong>und</strong>) D ≠ 0,<br />
so ist das Gleichungssystem nicht lösbar.<br />
= x<br />
y<br />
- 4 -<br />
2 2
2b) Ist D 0 <strong>und</strong> D = 0 <strong>und</strong> D = 0,<br />
so ist das Gleichungssystem zwar lösbar, aber nicht eindeutig.<br />
= x<br />
3.5.2 Dreireihige Determinanten<br />
y<br />
Die Cramersche Regel gilt auch für Gleichungssysteme mit 3 Gleichungen <strong>und</strong> 3 Unbekannten, falls man defi-<br />
a1 niert: a2 a<br />
b1 b2 b<br />
c1<br />
c2 c<br />
b2 = a1⋅ b3 c2 a2 −b1⋅ c3 a3 c2 a2<br />
+ c1⋅<br />
c3 a3<br />
b2<br />
b3<br />
3 3 3<br />
I) a ⋅ x + b ⋅ y + c ⋅ z = d<br />
1 1 1<br />
Lautet das Gleichungssystem II) a ⋅ x + b ⋅ y + c ⋅ z = d , so definiert man analog 3.5.1<br />
a b c<br />
1 1 1<br />
D: = a b c , D : d b c<br />
2 2 2<br />
a b c<br />
3 3 3<br />
2 2 2<br />
III) a ⋅ x + b ⋅ y + c ⋅ z = d<br />
d b c<br />
1 1 1<br />
x = 2 2 2 ,<br />
d b c<br />
3 3 3<br />
x<br />
<strong>und</strong> es ergibt sich<br />
D D<br />
x = ; y<br />
D D<br />
3 3 3 3<br />
y<br />
z<br />
= ;<br />
a d c<br />
1 1 1<br />
y = 2 2 2 ,<br />
D : a d c<br />
D<br />
z = .<br />
D<br />
a d c<br />
1<br />
3 3 3<br />
2<br />
a b d<br />
1 1 1<br />
D : a b d<br />
z = 2 2 2<br />
a b d<br />
3 3 3<br />
Die Berechnung dreireihiger Determinanten erleichtert die Regel von Sarrus:<br />
3 1 −2<br />
3 1<br />
Beispiel:<br />
−1 5 3 − 1 5 = 3⋅5⋅ 7+ 1⋅3⋅ 4 + ( −2) ⋅( −1) ⋅( −2) −( −2) ⋅5⋅4−3⋅3 ⋅( −2) −1 ⋅( −1) ⋅ 7 = 178<br />
4 −2 7 4 −2<br />
Aufgaben: Übungsblatt Aufgabe 1<br />
3.5.3 Lineare Unabhängigkeit<br />
⎛a1⎞ ⎛b1⎞ ⎛c1⎞ ! ⎜ ⎟ ! ⎜ ⎟ ! ⎜ ⎟<br />
Die <strong>Vektoren</strong> a =<br />
⎜<br />
a2⎟<br />
, b =<br />
⎜<br />
b2<br />
⎟<br />
<strong>und</strong> c =<br />
⎜<br />
c2⎟<br />
sind linear unabhängig, falls das Gleichungssystem<br />
⎜a⎟ ⎜<br />
⎝ 3 ⎠ b ⎟ ⎜<br />
⎝ 3 ⎠ c ⎟<br />
⎝ 3 ⎠<br />
I) a ⋅λ + b ⋅λ + c ⋅λ = 0<br />
1 1<br />
1 2 1<br />
2 1 2 2 2<br />
3 1 3 2 3<br />
3<br />
II) a ⋅λ + b ⋅λ + c ⋅λ = 0 eindeutig lösbar ist ( λ =λ =λ = ).<br />
III) a ⋅λ + b ⋅λ + c ⋅λ = 0<br />
3<br />
3<br />
a b c<br />
1 1 1<br />
Dann gilt für die Determinante D: = a b c ≠ 0.<br />
2 2 2<br />
a b c<br />
3 3 3<br />
1 2 3 0<br />
⎛a1⎞ ⎛b1⎞ ⎛c1⎞ ! ⎜ ⎟ ! ⎜ ⎟ ! ⎜ ⎟<br />
Andererseits sind die <strong>Vektoren</strong> a =<br />
⎜<br />
a2⎟<br />
, b =<br />
⎜<br />
b2<br />
⎟<br />
<strong>und</strong> c =<br />
⎜<br />
c2⎟<br />
sind linear abhängig, falls D = 0 gilt (Fall<br />
⎜a⎟ ⎜<br />
⎝ 3 ⎠ b ⎟ ⎜<br />
⎝ 3 ⎠ c ⎟<br />
⎝ 3 ⎠<br />
2b) aus 3.5.1. Fall 2a) kann nicht auftreten.<br />
Aufgaben: Übungsblatt, S. 275/27c – i, 28, 29, S. 287/46, 47<br />
- 5 -