INSTITUT F¨UR REGELUNGSTECHNIK - Institut für Regelungstechnik
INSTITUT F¨UR REGELUNGSTECHNIK - Institut für Regelungstechnik
INSTITUT F¨UR REGELUNGSTECHNIK - Institut für Regelungstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>INSTITUT</strong> FÜR <strong>REGELUNGSTECHNIK</strong><br />
<strong>Regelungstechnik</strong> I<br />
12. Übung<br />
SoSe 2012<br />
Jan Klöck<br />
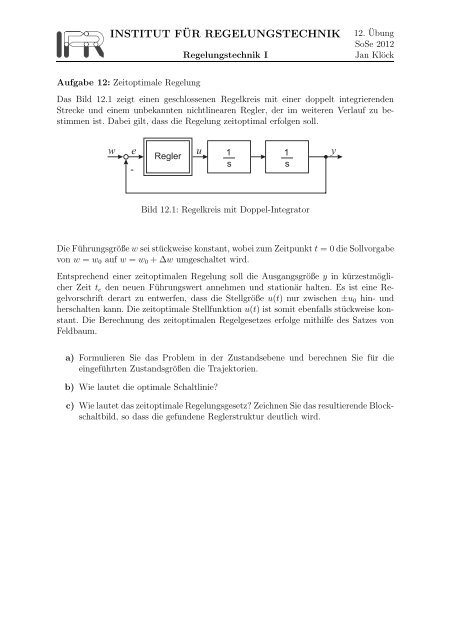
Aufgabe 12: Zeitoptimale Regelung<br />
Das Bild 12.1 zeigt einen geschlossenen Regelkreis mit einer doppelt integrierenden<br />
Strecke und einem unbekannten nichtlinearen Regler, der im weiteren Verlauf zu bestimmen<br />
ist. Dabei gilt, dass die Regelung zeitoptimal erfolgen soll.<br />
Bild 12.1: Regelkreis mit Doppel-Integrator<br />
DieFührungsgrößew seistückweise konstant,wobeizumZeitpunktt = 0dieSollvorgabe<br />
von w = w 0 auf w = w 0 +∆w umgeschaltet wird.<br />
Entsprechend einer zeitoptimalen Regelung soll die Ausgangsgröße y in kürzestmöglicher<br />
Zeit t e den neuen Führungswert annehmen und stationär halten. Es ist eine Regelvorschrift<br />
derart zu entwerfen, dass die Stellgröße u(t) nur zwischen ±u 0 hin- und<br />
herschalten kann. Die zeitoptimale Stellfunktion u(t) ist somit ebenfalls stückweise konstant.<br />
Die Berechnung des zeitoptimalen Regelgesetzes erfolge mithilfe des Satzes von<br />
Feldbaum.<br />
a) Formulieren Sie das Problem in der Zustandsebene und berechnen Sie <strong>für</strong> die<br />
eingeführten Zustandsgrößen die Trajektorien.<br />
b) Wie lautet die optimale Schaltlinie?<br />
c) WielautetdaszeitoptimaleRegelungsgesetz?ZeichnenSiedasresultierendeBlockschaltbild,<br />
so dass die gefundene Reglerstruktur deutlich wird.
<strong>INSTITUT</strong> FÜR <strong>REGELUNGSTECHNIK</strong><br />
<strong>Regelungstechnik</strong> I<br />
12. Übung<br />
SoSe 2012<br />
Jan Klöck<br />
Lösung<br />
Satz 1 (Satz von Feldbaum) Für ein aperiodisches System G der Ordnung n<br />
(pole{G} = s i , Re{s i } ≤ 0, Im{s i } = 0) gilt, dass<br />
• eine Einschaltung,<br />
• (n−1) Umschaltungen,<br />
• eine Ausschaltung<br />
zum jeweils richtigen Zeitpunkt genügen, um sämtliche Zustandsgrößen von einem beliebigen<br />
Anfangszustand aus in der kürzest möglichen Zeit auf ihre stationären Werte<br />
zu bringen, d.h. das System in den Abgleich zu führen. Man spricht in diesem Fall von<br />
einer optimalen Regelung. Dazu ist eine stückweise konstante Stellfunktion u(t) nötig,<br />
die abwechselnd zwischen einem oberen und einem unteren Maximalwert hin- und herschaltet.<br />
Beispiel: Der Satz von Feldbaum lässt sich anschaulich <strong>für</strong> ein System dritter Ordnung<br />
anhand der Zustandskurven des Bildes 12.2 demonstrieren.<br />
Bild12.2:ZeitoptimalerSchaltvorgang imZustandsraum<strong>für</strong>einSystem dritterOrdnung<br />
Die Schaltkurve ist durch die Strecke S-P-S’ gekennzeichnet. Man erkennt, dass es von<br />
jedem Punkt der Schaltfläche F mit dem richtigen Vorzeichen der Stellgröße u möglich<br />
ist, zur Schaltkurve zu gelangen. Beginnend bei einem beliebigen Anfangszustand (A)<br />
wird die Stellgröße u mit dem richtigen Vorzeichen eingeschaltet, bis der Zustandspunkt
<strong>INSTITUT</strong> FÜR <strong>REGELUNGSTECHNIK</strong><br />
<strong>Regelungstechnik</strong> I<br />
12. Übung<br />
SoSe 2012<br />
Jan Klöck<br />
auf die Schaltfläche F trifft (B). Nun wird umgeschaltet, worauf sich der Punkt auf der<br />
Schaltfläche zur Schaltkurve S-P-S’ bewegt. Im Schnittpunkt (C) wird die Stellgröße<br />
erneut umgeschaltet, so dass der Systemzustand in den Ursprung läuft. Dort wird die<br />
Stellgröße u schließlich abgeschaltet und das System verharrt im stationären Endwert.<br />
Es wurde also erwartungsgemäß <strong>für</strong> ein System dritter Ordnung die Stellgröße:<br />
• 1× eingeschaltet,<br />
• 2× umgeschaltet und<br />
• 1× ausgeschaltet.<br />
Dieser Schaltvorgang ist optimal, d.h. es gibt keine andere Möglichkeit, den Ursprung<br />
schneller zu erreichen.<br />
a)<br />
Es werden als Zustandsgrößen der Regelfehler e und seine zeitliche Ableitung ė gewählt.<br />
Durch diese Wahl ist die Darstellung im Zustandsraum unabhängig von der Sollwertvorgabe<br />
w 0 (vgl. Übung 8: Zustandskurven). Es ergeben sich aufgrund des doppelten<br />
Integrators wieder parabelförmige Trajektorien.<br />
Bild 12.3: Zustandskurven einer I2-Strecke<br />
b)<br />
Die zeitoptimale Schaltlinie folgt sofort aus den Zustandskurven:<br />
ė = −sign(e) √ 2u 0 |e|