Teil 8
Teil 8
Teil 8

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Folie 1 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
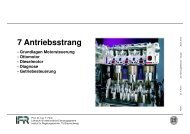
8 Systeme zum Insassenschutz<br />
- passive Sicherheit<br />
- aktive Sicherheit
Folie 2 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Steife Zelle<br />
ESC<br />
GIDAS<br />
Stand:<br />
27.6.2
Fahrzeugsicherheit<br />
Aufteilung und Entwicklung der Verkehrsopfer in Deutschland<br />
Folie 8 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Sicherheit<br />
Abbreviated Injury Scale<br />
AIS 0: no injuries.<br />
AIS 1: light injuries such as skin-deep wounds, muscle pains etc.<br />
AIS 2: moderate injuries such as deep flesh wounds, concussion with up to 15 minutes of<br />
unconsciousness, uncomplicated long bone fractures, uncomplicated rib fractures etc.<br />
AIS 3: severe but not life-threatening injuries such as skull fractures without brain injury, spinal<br />
dislocations below the fourth cervical vertebra without damage to the spinal cord, more than<br />
one fractured rib without paradoxical breathing etc.<br />
AIS 4: severe injuries (life-threatening, survival probable) such as concussion with or without skull<br />
fractures with up to 12 hours of unconsciousness, paradoxical breathing.<br />
AIS 5: critical injuries (life-threatening, survival uncertain) such as spinal fractures below the fourth<br />
cervical vertebra with damage to the spinal cord, intestinal tears, cardiac tears, more than<br />
12 hours of unconsciousness including intracranial bleeding.<br />
AIS 6: extremely critical or fatal injuries such as fractures of the cervical vertebrae above the third<br />
cervical vertebra with damage to the spinal cord, extremely critical open wounds of body<br />
cavities (thoracic and abdominal cavities) etc.<br />
AIS 9: unknown injuries.<br />
MAIS (Maximum Abbreviated Injury Scale) is the highest AIS of an injured person.<br />
Quelle: www.unfallforensik.de/body_lexikon.html<br />
Folie 10 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Folie 11 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Fahrzeugsicherheit<br />
Arbeitsthemen<br />
Quelle: Handbuch Kraftfahrzeugtechnik, Vieweg
Fahrzeugsicherheit<br />
Einordnung der Systeme<br />
Aktive Sicherheit<br />
aktiv<br />
Fahrzeugführung<br />
Fußgänger-<br />
Objekt-<br />
Erkennung<br />
Unfallwarnung<br />
Rückhalte<br />
-systeme<br />
Passive Sicherheit<br />
PreCrash<br />
passiv<br />
Sicherheit<br />
Spurhalte-<br />
Assistent<br />
ADR<br />
stop+go<br />
Spur-<br />
Verlassenswarnung<br />
Kollisionsvermeidun<br />
g<br />
Automatische<br />
Notbremsung<br />
Tote-<br />
Winkel-<br />
Detektion<br />
ADR<br />
Nachtsicht-<br />
Unterstützung<br />
Aktive<br />
Einparkhilfe<br />
Fahrerunterstützung<br />
Komfort<br />
Folie 12 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Passive Insassenschutzsysteme<br />
Maßstab zur Beurteilung der Belastung des menschlichen Gehirns<br />
Folie 13 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Quelle: USA DoD, 2000
Passive Insassenschutzsysteme<br />
physikalischer Hintergrund<br />
Verzögerungs-Zeit, Geschwindigkeits-Zeit Verläufe<br />
für Fahrzeug und Insassen bei einem 50-km/h<br />
Aufprall auf ein festes Hindernis<br />
Beispiel: Selbstversuch Col. Stapp, 1954<br />
1000 km/h in 1,4s abgebremst = 20g für 1,4s<br />
Quelle: Handbuch Kraftfahrzeugtechnik, Vieweg<br />
Folie 14 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Passive Insassenschutzsysteme<br />
Funktion<br />
Crashversuche<br />
Schutz der Fahrzeuginsassen vor den Folgen eines<br />
Unfalls.<br />
Wird erreicht durch<br />
• Maßnahmen in der mechanischen Struktur des Fahrzeuges<br />
(Festigkeit des Rohbaus, gezielter Abbau der Energie bei einem<br />
Aufprall durch kontrollierte Verformung von Fahrzeugteilen,<br />
Vermeidung großer nichtverformbarer Bauteile im<br />
Verformungsbereich beim Fahrzeugpackage)<br />
• Minimierung des Verletzungsrisikos durch entsprechende<br />
Gestaltung des Innenraums (Radien von hervorstehenden <strong>Teil</strong>en auf<br />
den Oberflächen, Bruchverhalten der Werkstoffe)<br />
• Mechanische Insassenschutzsysteme<br />
(Sicherheitsgurte, Procon-ten: Entfernen der Lenksäule aus dem<br />
Aufprallbereich durch Seilzug)<br />
• Elektronisch gesteuerte Insassenschutzsysteme<br />
• Airbag (Front, Seite, Kopf, Knie…)<br />
• Gurtstraffer, elektrisch gezündet<br />
• Adaption des Auslöseverhalten abhängig von der<br />
Crashintensität (stufige Airbags, Sensordaten-Verarbeitung)<br />
• Precrash: Vorbereitung auf einen Crash mit Hilfe von<br />
Abstandssensoren (Gurte straffen, Sitze verstellen,<br />
Auslöseverhalten durch Vorausberechnung optimieren)<br />
Folie 15 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Passive Insassenschutzsysteme<br />
Airbag<br />
Folie 16 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Passive Insassenschutzsysteme<br />
Sensorsignale beim Crash<br />
AZT Versicherungs Test::<br />
keine Auslösung von Gurtstraffer<br />
und Airbag<br />
21 km/h 0° Wand:<br />
keine Airbagauslösung<br />
64 km/h Offset:<br />
schnelle Auslösung Gurtstraffer<br />
und Airbag<br />
Quelle:Feser, Siemens SVDO<br />
Folie 17 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Folie 18 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Prinzipieller Aufbau Airbagsteuergerät (1)<br />
Quelle:Volkswagen AG<br />
Passive Insassenschutzsysteme
Passive Insassenschutzsysteme<br />
Prinzipieller Aufbau Airbagsteuergerät (2)<br />
Sicherheitskonzept mit<br />
Sicherheitscontroller und unabhängigen<br />
Hardware Watch-Dogs, z.B.:<br />
1. Überwachung des Systemtakts mit<br />
eigenem Oszillator<br />
2. Überwachung von Realtime-Prozessen<br />
(schnelles µs-Zeitraster) auf komplette und<br />
richtige Abfolge<br />
3. Überwachung der Backgroundprozesse<br />
im ms-Zeitraster (z.B. Eigendiagnose)<br />
Quelle:Volkswagen AG<br />
Folie 19 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Folie 20 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Applikationsbeispiel Airbagsteuergerät<br />
Quelle:www.infineon.de<br />
Passive Insassenschutzsysteme
Passive Insassenschutzsysteme<br />
Beispiel Aufbau eines 1-stufigen Fahrerairbagmoduls<br />
Folie 21 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Rueckhaltesysteme<br />
Prinzipieller Aufbau eines pyrotechnischen Anzündelements<br />
Berstelement<br />
Kappe<br />
Befestigungselement<br />
Quelle:Volkswagen AG<br />
Sockel<br />
Sekundärsatz<br />
Primärzündsatz<br />
Zündement<br />
Kontaktstifte<br />
470 pF<br />
elektr. ESB eines<br />
Anzündelements für<br />
Wechselstromzündung:<br />
Wechselstromzündung mit Wechselstrompulsen typ. 80 kHz zur Vermeidung unerwünschter<br />
Auslösungen durch Kurzschlüsse im Bordnetz (z.B. fehlerhafte Isolation, Crash oder Einsatz von<br />
Rettungsscheren)<br />
2 Ω<br />
Folie 22 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Folie 23 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Quelle:Feser, Siemens SVDO<br />
Passive Insassenschutzsysteme<br />
Crash Impact Sound Sensor
Folie 24 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Rueckhaltesysteme<br />
Sensormatte für Out-of-Position Erkennung<br />
Quelle:Bosch, Sicherheits- und Komfortsysteme, Vieweg
Passive Insassenschutzsysteme<br />
Ableitung des Körpergewichts aus Sitzprofil bzw. Hüftknochenabstand<br />
Quelle:Bosch, Sicherheits- und Komfortsysteme, Vieweg<br />
Folie 25 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Passive Insassenschutzsysteme<br />
Glasfaser Biegesensor<br />
Bei positiver Krümmung tritt weniger Licht durch<br />
die Öffnung aus<br />
Bei gerader Ausrichtung tritt eine definierte<br />
Lichtmenge durch die Öffnung aus<br />
Bei positiver Krümmung tritt mehr Licht durch die<br />
Öffnung aus<br />
Quelle: Handbuch Kraftfahrzeugelektronik, Vieweg<br />
Folie 26 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Passive Insassenschutzsysteme<br />
Entsorgungszündung<br />
Eine klare Unterscheidung ist hier notwendig, zwischen der<br />
• sog. „Fireman disposal“ bei zweistufigen Airbageinheiten zur Vermeidung von<br />
Verletzungen beim Rettungspersonal<br />
und der<br />
• Entsorgungszündung bei der Altautoverwertung ab ca. 2007 gesetzliche<br />
Forderung.<br />
• Realisierung über ein externes Gerät, welches über das Airbagsteuergerät alle<br />
vorhandenen Zündkreise gleichzeitig zündet.<br />
Folie 27 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Einordnung der Systeme<br />
Aktive Sicherheit<br />
aktiv<br />
Fahrzeugführung<br />
Fußgänger-<br />
Objekt-<br />
Erkennung<br />
Unfallwarnung<br />
Automatische<br />
Notbremsung<br />
Passive Sicherheit<br />
PreCrash<br />
passiv<br />
Sicherheit<br />
Spurhalte-<br />
Assistent<br />
ADR<br />
stop+go<br />
Spur-<br />
Verlassenswarnung<br />
Kollisionsvermeidung<br />
Tote-<br />
Winkel-<br />
Detektion<br />
ADR<br />
Nachtsicht-<br />
Unterstützung<br />
Aktive<br />
Einparkhilfe<br />
Fahrerunterstützung<br />
Komfort<br />
Folie 28 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Entwicklung<br />
Einsatz von Systemen zur Vermeidung eines Unfalls.<br />
Bisher verbreitete Systeme können bestenfalls ein Fehlverhalten des Fahrzeugführers<br />
ausgleichen bzw. dessen Folgen mindern:<br />
• Antiblockiersystem ABS<br />
• Bremsassistent<br />
• Fahrdynamikregelung ESP<br />
Zukünftig können auch das Verhalten benachbarter Fahrzeuge und die Umgebung erfasst<br />
werden:<br />
• Automatische Distanzregelung (heutige Systeme können nur als Komfortsysteme klassifiziert<br />
werden, da die Zuverlässigkeit in der Zielerkennung nicht ausreichend für ein Sicherheitssystem<br />
ist)<br />
• Nachtsichtgeräte (Infrarotkamera in Verbindung mit Head-up Display)<br />
• Spurhalteassistent (lane departure warning)<br />
• Tote-Winkel-Erkennung und Spurwechselassistent<br />
Folie 29 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Szenarien<br />
Folie 30 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Abstandsradar mit Doppler-Effekt<br />
• Abstandsmessung durch Laufzeitmessung<br />
Quelle:Bosch, Sicherheits- und Komfortsysteme, Vieweg<br />
• Messung der Relativgeschwindigkeit durch<br />
Dopplereffekt<br />
• Winkelmessung über<br />
Phasendifferenzmessung mehrer Antennen<br />
Folie 31 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Folie 32 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Aktive Insassenschutzsysteme<br />
Auflösungsarten<br />
Quelle: Dr. Meinecke, VW AG
Aktive Insassenschutzsysteme<br />
FMCW-Radar zur Entfernungs- und Geschwindigkeitsmessung (1)<br />
Radar sendet mit frequenzmoduliertes<br />
Dauerstrich (CW) Signal (typ. Sägezahn):<br />
1. Entfernungsmessung r aus Messung<br />
der Frequenzdifferenz f r zwischen<br />
aktuellem Sende- zu Empfangssignal<br />
r<br />
<br />
c <br />
<br />
2<br />
c fr<br />
T<br />
2<br />
B<br />
Quelle, Musa, IEE, 2000<br />
B<br />
Folie 33 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
FMCW-Radar zur Entfernungs- und Geschwindigkeitsmessung (2)<br />
2. Messung der Differenzgeschwindigkeit<br />
v r aus der geschwindigkeitsabhängigen<br />
Dopplerverschiebung f d des empfangenen<br />
Signals<br />
f<br />
d<br />
<br />
f<br />
1<br />
vr<br />
1<br />
c<br />
Quelle, Musa, IEE, 2000<br />
Folie 34 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Winkelmessung<br />
Eine Winkelmessung kann mit mehreren horizontal nebeneinander platzierten Antennen erfolgen.<br />
Bedingt durch den Aufbau des Sendeteils werden die Sendesignale gleichphasig abgestrahlt, aus der<br />
Phasenverschiebung der Empfangssignale lässt sich per Triangulation der Winkel zum Zielobjekt bestimmen.<br />
Selbst bei einem Antennenabstand b im Millimeterbereich erfolgt bei einer Wellenlänge von 4mm schon eine<br />
Phasenverschiebung zwischen den empfangenen Signalen, die eine auswertbare Auflösung des horizontalen<br />
Winkels zum Ziel zulässt.<br />
sin <br />
eigenes<br />
Fahrzeug<br />
b<br />
<br />
2 <br />
b<br />
φ<br />
α<br />
Ziel<br />
Folie 35 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Weiterverarbeitung der Zielinformation<br />
Mit den vorgenannten Verfahren kann der Sensor Ziele nach<br />
• relativer Position (Winkel und Abstand)<br />
• relativer Geschwindigkeit<br />
zum eigenen Fahrzeug erfassen.<br />
Diese Objekte sind von der Signalverarbeitung zu klassifizieren in<br />
• ruhende Objekte: Straßenbegrenzung, Bäume, Gebäude, parkende Fahrzeuge,…<br />
• bewegte Fahrzeuge<br />
• Störungen/Fehlziele<br />
Aus den bewegten Fahrzeugen sind diejenigen auszuwählen, die für die Distanzregelung von<br />
Bedeutung sind:<br />
• in eigener Fahrbahn vorausfahrend<br />
• in benachbarten Fahrbahnen, soweit für Spurwechselmanöver relevant<br />
Folie 36 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Distanzregelung<br />
Das ADR System prognostiziert dazu den voraussichtlichen Weg des eigenen Fahrzeuges (Fahrschlauch)<br />
mittels<br />
• Lenkwinkelsensor (ESP)<br />
• Gierratensensor (ESP)<br />
• Position der vom Radarsensor detektierten stehenden Objekte<br />
In Verbindung mit den bewegten Zielen lassen sich darin die für die Distanzregelung relevanten<br />
Abstandsinformationen ermitteln<br />
Der Regelalgorithmus beeinflusst die Beschleunigung mittels<br />
Eingriff in das Motormanagement Verzögerung über einen<br />
aktiven Bremsbooster oder das ESP-System.<br />
Parameter sind:<br />
• Wunschabstand (in Zeiteinheiten,<br />
damit Geschwindigkeitsunabhängig)<br />
• Beschleunigungs- bzw. Verzögerungswerte,<br />
ggf. situationsabhängig (Autobahnabfahrt u.ä.)<br />
Folie 37 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Folie 38 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Quelle:Bosch, Sicherheits- und Komfortsysteme, Vieweg<br />
Aktive Insassenschutzsysteme<br />
Prinzipieller Aufbau ACC-System
Aktive Insassenschutzsysteme<br />
Kommunikationspartner des ACC-Systems<br />
Vehicle Stability<br />
Control<br />
Infotainment<br />
System<br />
Automatic<br />
Gearbox<br />
Controller<br />
INF_status<br />
VSC_yaw_rate<br />
VSC_status<br />
INF_yaw_rate<br />
AGB_status<br />
Target<br />
Environment<br />
SWP_status<br />
Switch Pack<br />
ACC system<br />
ENV_reflections<br />
ENV_illumination<br />
INF_country_code<br />
VSC_wheel_speeds<br />
VSC_vsc_interventions<br />
AGB_gear_selector_position<br />
SWP_driver_switches<br />
INP_vehicle_speed<br />
DSE_diagnostic-<br />
_information<br />
EMS_status<br />
DSE_diagnostic-<br />
_commands<br />
Diagnostics<br />
Service Test<br />
Equipment<br />
Engine Management<br />
System<br />
BBC_status<br />
EMS_torque_demand<br />
EMS_driver_override<br />
EMS_maximum_moment<br />
BBC_brake_demand<br />
BBC_brake_pressed<br />
INP_driver_information<br />
INP_status<br />
Brake Booster<br />
Controller<br />
Instrument<br />
Pack<br />
Quelle: U Kassel, Prof. Leohold<br />
Folie 39 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Hardware-in-the-Loop Testsystem für Abstandsdistanzregelung<br />
SMS-<br />
Radarsimulator<br />
- Radarzieldarstellung<br />
- Radarsensormodell<br />
- Zielauswahlverfahren<br />
Streckenführung<br />
Rel.-<br />
Koordinaten<br />
Radarziele<br />
Multifunktionsdisplay<br />
ACC-<br />
Ziel<br />
ACC-<br />
Bedienpanel<br />
IPG-Obstacles<br />
Radarobjektgenerator<br />
s<br />
IPG-ROAD<br />
Fahrbahnmodell<br />
ACC-Steuergerät<br />
- Geschwindigkeitsregler<br />
- Abstandsregler<br />
- Radarsensor (deakt.)<br />
- Zielauswahl (deakt.)<br />
Koordinaten Radarziele<br />
Quelle: U Kassel, Prof. Leohold<br />
Fahrzeugposition<br />
Radpositionen<br />
IPG-DRIVER<br />
Fahrermodell<br />
Motor-Steuergerät<br />
Booster-Steuergerät<br />
Boostermodell<br />
Booster-<br />
Magnetspule<br />
Lenkwinkel<br />
Gaspedalstellung<br />
Drosselklappen-<br />
Stellung<br />
////<br />
Momentenanforderung<br />
Bremsdruckanforderung<br />
Spulen-<br />
Strom<br />
Geschwindigkeit und Gierrate des Radarfahrzeugs<br />
IPG-TIRE<br />
Reifenmodell<br />
IPG-CAR<br />
Modell Radarfahrzeug<br />
Folie 40 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Stop and Go<br />
Grenzen der 1. Generation<br />
• Nahbereich infolge des schmalen Strahls kaum abgedeckt<br />
(schräg versetzt fahrender Vorderwagen, Fußgänger,…)<br />
daher Ansprechschwelle ACC auf ca. >30km/h eingestellt<br />
• Generell als Komfortsystem eingestuft, da signifikante Zahl von Fehlzielen<br />
(Ziel nicht/zu spät erkannt, Objekte am Fahrbahnrand werden als Ziel interpretiert)<br />
• Automatisches Anfahren im städtischen Bereich erfordert strengeres Sicherheitskonzept (Szenario<br />
Fußgänger vorm Auto) als Komfortsystem<br />
Nächste Generation<br />
• Funktionalität bis zum Stand (0 km/h) gegeben, automatisches Anfahren<br />
damit auch Funktion im Stau und im Stadtverkehr<br />
• Zusatzsensorik zur Abdeckung des Nahbereichs<br />
mit Reichweite 0,5 …20m und voller Abdeckung der Fahrspur<br />
• Kopplung mit Brake-by-wire erforderlich (elektrisch gesteuerter Bremsbooster, EHB, EMB)<br />
Folie 41 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Parkassistent<br />
Mit einer Anzeige kann das System den Fahrer während einer Vorbeifahrt auf passende Parklücken hinweisen und ihm<br />
beim rückwärts Einparken Lenkmanöver vorgeben. In Verbindung mit steer-by-wire sind automatische Einparkmanöver<br />
möglich (VW Touran). Aus Sicherheitsgründen wird dabei das Anfahren und Bremsen immer dem Fahrer überlassen<br />
bleiben. Neben neuen seitwärts gerichteten Sensoren kann eine vorhandene Parkdistanzanzeige sinnvoll mit<br />
eingebunden werden.<br />
US-Sensor<br />
Lenkwinkel<br />
Quelle: U Kassel, Prof. Leohold<br />
Folie 42 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Parkassistent<br />
Parklückenvermessung mit Ultraschallsensoren<br />
Ein Sensor mit horizontal schmalem und vertikal großem Messwinkel erfasst Entfernungen zu Objekten senkrecht zum<br />
Fahrzeug und ermöglicht so eine genaue Vermessung der Parklücken. Um Störobjekte, z.B. Echos von Split o.ä. auf<br />
der Fahrbahn, auszublenden, werden die Ergebnisse mittels einer Messung mit einem relativ ungenauer Sensor mit<br />
breiter Messkeule plausibilisiert.<br />
Umfelderfassung aus einer Vorbeifahrt:<br />
Quelle: Pruckner (2003)<br />
Folie 43 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Folie 44 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Aktive Insassenschutzsysteme<br />
Parkassistent und Bedienoberfläche - Toyota<br />
Quelle: www.All4Engineers.com
Folie 45 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Aktive Insassenschutzsysteme<br />
Parkassistent und Bedienoberfläche - Volkswagen<br />
Quelle: Volkswagen AG
Aktive Insassenschutzsysteme<br />
Spurhalteassistent<br />
Fahrspurerkennung mit<br />
Kamerasystem<br />
Anforderungen:<br />
• Auflösung<br />
• Hohe Dynamik<br />
(Gegenlicht,<br />
Schmutz/Wasser auf<br />
Fahrbahn, fehlende<br />
Fahrbahnmarkierung)<br />
• Bildverarbeitung in<br />
Echtzeit<br />
• Bildverarbeitungsalgorithmen<br />
(fehlende<br />
Fahrbahnmarkierung)<br />
Fahrerführung über<br />
• Tonsignale (Rattermarken)<br />
oder<br />
• haptische Rückkopplung<br />
(Lenkkraftunterstützung)<br />
Quelle: Rieth/Conti (2003)<br />
Folie 46 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Spurerkennung<br />
Folie 47 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Videoauswertung<br />
Sensorik zur Erfassung des Fahrzeugumfeldes:<br />
Dynamikproblematik von CCD-Kameras<br />
Quelle: Fraunhofer-Institut IMS (2003)<br />
Folie 48 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Nahinfrarot<br />
Nahinfrarot (NIR) strahlt das Vorfeld des Fahrzeugs mit einer Infrarot-Lichtquelle an.<br />
Das von Objekten, der Straße und von Personen reflektierte Licht<br />
wird von einer Infrarot-Kamera aufgenommen. Reichweite ist begrenzt durch die<br />
Infrarot-Lichtquelle.<br />
Quelle: Bosch<br />
Folie 49 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Ferninfrarot<br />
Ferninfrarot (FIR) registriert eine Wärmebildkamera direkt die Abstrahlungswärme von<br />
Objekten und Personen, deswegen ist eine separate Lichtquelle am Fahrzeug<br />
überflüssig (Reichweite typ. 300m).<br />
Quelle: BMW<br />
Folie 50 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Sensorik für autonomes Fahren bzw. unfallvermeidendes Fahrzeug<br />
Karte<br />
Folie 52 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014<br />
Aktive Insassenschutzsysteme<br />
Umfeldmodellierung<br />
Fahrbahn-Fusion<br />
(Weg)<br />
Quelle: Volkswagen AG<br />
Kamera<br />
77 GHz Radar Ultraschall-Sensoren<br />
Situationsverständnis<br />
Sensor-<br />
Datenfusion<br />
Sensorik<br />
Belegungs-Gitter-Fusion<br />
(Freibereiche)<br />
Objekt-Fusion<br />
(Hindernisse)<br />
Cut-In<br />
Prädiktion
Aktive Insassenschutzsysteme<br />
Umfeldmodellierung<br />
Innerstädtische Umgebungserfassung und Interpretation ist Grundlage für eine<br />
erfolgreiche Funktionsdarstellung<br />
Objektbasiertes<br />
Umfeldmodell<br />
Gridbasiertes<br />
Umfeldmodell<br />
Graphenbasiertes<br />
Umfeldmodell<br />
Quelle: Volkswagen AG<br />
Folie 53 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Manöverprädiktion<br />
Vorhersage von Fahrstreifenwechselmanövern für andere Verkehrsteilnehmer<br />
unter Betrachtung von :<br />
- Fahrzeugzustand und Fahrstreifenzuordnung<br />
Quelle: Volkswagen AG<br />
Folie 54 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Manöverprädiktion<br />
Vorhersage von Fahrstreifenwechselmanövern für andere Verkehrsteilnehmer<br />
unter Betrachtung von :<br />
- Fahrzeugzustand und Fahrstreifenzuordnung<br />
- Verkehrsregeln und Geboten<br />
Quelle: Volkswagen AG<br />
Folie 55 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Manöverprädiktion<br />
Vorhersage von Fahrstreifenwechselmanövern für andere Verkehrsteilnehmer<br />
unter Betrachtung von :<br />
- Fahrzeugzustand und Fahrstreifenzuordnung<br />
- Verkehrsregeln und Geboten<br />
- Interaktion / Beziehung zu anderen Fahrzeugen<br />
Quelle: Volkswagen AG<br />
Folie 56 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Automatische Notbremsung<br />
My<br />
car<br />
Sensorik:<br />
Aktorik:<br />
Funktion:<br />
Problem:<br />
Minimaler Abstand für<br />
stabiles Ausweichmanöver<br />
Minimaler Abstand s brems für Vollbremsung<br />
ohne Kollision<br />
(auf Zeitachse: time to collision / ttc)<br />
Überwachung der Fahrspur vor dem eigenen Fahrzeug<br />
Bremsen (EHB, EMB) mit Fahrdynamikregelung zur Stabilisierung<br />
bei Erreichen von ttc automatische Auslösung einer Notbremsung<br />
juristisch > Aktion ohne Fahrereingriff, Verantwortlichkeit bei Fehlauslösung<br />
funktional > wie verläuft Aktion, wenn Fahrer Hindernis umfahren will?<br />
Ermittlung der möglichen Verzögerung a brems (abh. Fahrbahn, Reifen,..)<br />
Zielerkennung im Kurvenverlauf<br />
car1<br />
t<br />
v ad v a t<br />
0<br />
t<br />
0<br />
<br />
0 brems<br />
1<br />
s vd v0 t abrems<br />
t<br />
2<br />
v<br />
ttc <br />
a<br />
v<br />
2<br />
0 0<br />
sbrems<br />
brems<br />
2abrems<br />
2<br />
Folie 57 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014
Aktive Insassenschutzsysteme<br />
Kollisionsvermeidung durch autonomes Fahrmanöver<br />
car2<br />
Sensorik:<br />
Aktorik:<br />
Funktion:<br />
Problem:<br />
My<br />
car<br />
Minimaler Abstand für stabiles<br />
Ausweichmanöver<br />
Minimaler Abstand s brems für Vollbremsung ohne Kollision<br />
(auf Zeitachse: time to collision / ttc)<br />
Überwachung des Umfeldes vor dem eigenen Fahrzeug,<br />
der Fahrspur hinter/neben dem Fahrzeug (Gefahr durch Überholer?),<br />
der Umgebung des Hindernisses (freier Raum für Manöver?)<br />
Lenken (EML) und Bremsen mit Fahrdynamikregelung zur Stabilisierung<br />
nach Unterschreiten von ttc automatisches Umfahren des Hindernisses<br />
juristisch > Aktion ohne Fahrereingriff, Verantwortlichkeit bei Fehlauslösung?<br />
funktional > Ermittlung der möglichen Verzögerung a brems<br />
Zielerkennung im Kurvenverlauf und<br />
aller möglichen gefährlichen Ziele um und hinter Hindernis<br />
car1<br />
Folie 58 Prof. Dr. T. Form „VL Fahrzeugelektronik 8.ppt“ 02.02.2014