Aufgabenkatalog - Institut für Mechanik der TU Berlin
Aufgabenkatalog - Institut für Mechanik der TU Berlin
Aufgabenkatalog - Institut für Mechanik der TU Berlin

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 1<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
Auf den folgenden Seiten ist <strong>der</strong> <strong>Aufgabenkatalog</strong> <strong>für</strong> <strong>Mechanik</strong> 2 abgedruckt, aus dem jede Woche Aufgaben<br />
<strong>für</strong> die Große Übung, die Tutorien und das eigenständige Arbeiten ausgewählt werden. Lösungen<br />
zu den Tutoriums- und Hausaufgaben werden ungefähr eine Woche nach Bearbeitung veröffentlicht. Lei<strong>der</strong><br />
schleichen sich manchmal in die veröffentlichten Lösungen Fehler ein. Wir bemühen uns, diese möglichst<br />
zügig auszumerzen. Je<strong>der</strong> Student ist aber in erster Linie selbst verantwortlich. Darum selbständig rechnen!<br />
Wer gerne noch mehr Aufgaben (mit Musterlösungen) rechnen möchte, sei auf die breite Auswahl an<br />
Aufgabenbüchern verwiesen.<br />
Die Aufgaben werden nicht notwendigerweise in <strong>der</strong> Reihenfolge des Katalogs abgearbeitet.<br />
1 Grundlagen Kinematik<br />
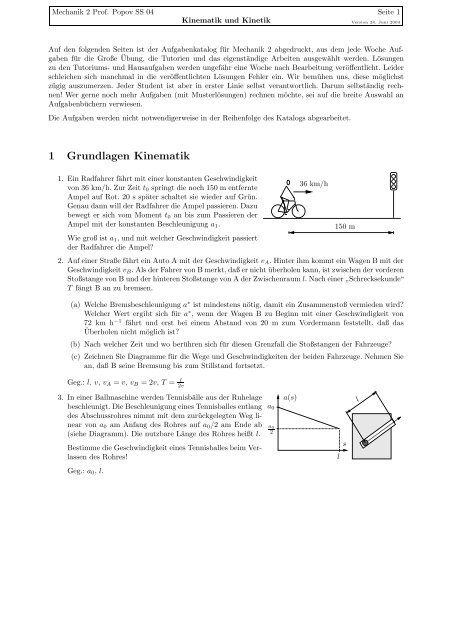
1. Ein Radfahrer fährt mit einer konstanten Geschwindigkeit<br />
von 36 km/h. Zur Zeit t0 springt die noch 150 m entfernte<br />
Ampel auf Rot. 20 s später schaltet sie wie<strong>der</strong> auf Grün.<br />
Genau dann will <strong>der</strong> Radfahrer die Ampel passieren. Dazu<br />
PSfrag replacements<br />
bewegt er sich vom Moment t0 an bis zum Passieren <strong>der</strong><br />
Ampel mit <strong>der</strong> konstanten Beschleunigung a1.<br />
Wie groß ist a1, und mit welcher Geschwindigkeit passiert<br />
<strong>der</strong> Radfahrer die Ampel?<br />
36 km/h<br />
150 m<br />
2. Auf einer Straße fährt ein Auto A mit <strong>der</strong> Geschwindigkeit vA. Hinter ihm kommt ein Wagen B mit <strong>der</strong><br />
Geschwindigkeit vB. Als <strong>der</strong> Fahrer von B merkt, daß er nicht überholen kann, ist zwischen <strong>der</strong> vor<strong>der</strong>en<br />
Stoßstange von B und <strong>der</strong> hinteren Stoßstange von A <strong>der</strong> Zwischenraum l. Nach einer ” Schrecksekunde“<br />
T fängt B an zu bremsen.<br />
(a) Welche Bremsbeschleunigung a ∗ ist mindestens nötig, damit ein Zusammenstoß vermieden wird?<br />
Welcher Wert ergibt sich <strong>für</strong> a ∗ , wenn <strong>der</strong> Wagen B zu Beginn mit einer Geschwindigkeit von<br />
72 km h −1 fährt und erst bei einem Abstand von 20 m zum Vor<strong>der</strong>mann feststellt, daß das<br />
Überholen nicht möglich ist?<br />
(b) Nach welcher Zeit und wo berühren sich <strong>für</strong> diesen Grenzfall die Stoßstangen <strong>der</strong> Fahrzeuge?<br />
(c) Zeichnen Sie Diagramme <strong>für</strong> die Wege und Geschwindigkeiten <strong>der</strong> beiden Fahrzeuge. Nehmen Sie<br />
an, daß B seine Bremsung bis zum Stillstand fortsetzt.<br />
Geg.: l, v, vA = v, vB = 2v, T = l<br />
2v<br />
l<br />
3. In einer Ballmaschine werden Tennisbälle PSfrag aus <strong>der</strong> replacements Ruhelage a(s)<br />
beschleunigt. Die Beschleunigung eines Tennisballes entlang a0<br />
des Abschussrohres nimmt mit dem zurückgelegten Weg linear<br />
von a0 am Anfang des Rohres auf a0/2 am Ende ab a0<br />
(siehe Diagramm). Die nutzbare Länge des Rohres heißt l. 2<br />
s<br />
Bestimme die Geschwindigkeit eines Tennisballes beim Verlassen<br />
des Rohres!<br />
l<br />
Geg.: a0, l.
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 2<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
4. In <strong>der</strong> Ballmaschine aus Aufgabe 3 wird <strong>der</strong> Abschussmechanismus<br />
ausgetauscht. Die Beschleunigung verläuft nun<br />
linear über <strong>der</strong> Zeit gemäß nebenstehendem Diagramm. Zur<br />
zunächst nicht bekannten Zeit tl verlässt <strong>der</strong> Ball das Abschussrohr.<br />
(a) Bestimme die Geschwindigkeit eines Tennisballes<br />
beim Verlassen des Rohres! PSfrag replacements<br />
(b) Das Abschussrohr steht unter einem Winkel α zur<br />
Erdoberfläche. Das Ende des Rohres befindet sich in<br />
einer Höhe h über dem (ebenen) Erdboden. Wie weit<br />
fliegen die Tennisbälle? Vernachlässige die Reibung!<br />
(c) Bestimme die maximale Flughöhe <strong>der</strong> Tennisbälle!<br />
Geg.: a0, l, h, α, g.<br />
5. Fülle die leeren Fel<strong>der</strong> <strong>für</strong> Ort, Geschwindigkeit und Beschleunigung! Alle Größen, die nicht explizit<br />
als Funktion <strong>der</strong> Zeit t angegeben sind, seien konstant.<br />
Ort Geschwindigkeit Beschleunigung Nebenbedingungen<br />
¨x(t) = a0<br />
x(0) = ˙x(0) = 0<br />
s(t) = L sin Ωt<br />
˙r(t) = v0 + a1t r(0) = r0<br />
y(t) = r0<br />
�<br />
√ cos ω t−t1 2 (t2 − t2 �<br />
0)<br />
l<br />
a0<br />
a0<br />
2<br />
a(t)<br />
h<br />
˙y(t) = u0e ωt y(t0) = u0<br />
ω<br />
˙ϕ(t) = ϕ(t) ϕ(0) = 1<br />
¨x(t) = −λ 2 x(t) − v0t x(0) = L, ˙x(0) = − v0<br />
λ 2<br />
6. Der nebenstehend skizzierte Industrieroboter kann sich um die senkrechte<br />
z-Achse drehen (Drehwinkel ϕ), seinen Arm um das Gelenk in<br />
<strong>der</strong> Höhe l auf und ab bewegen (Winkel ψ) und zusätzlich die Länge<br />
des Armes r verän<strong>der</strong>n.<br />
Berechne den Orts- und Geschwindigkeitsvektor (in kartesischen Koordinaten)<br />
des auf <strong>der</strong> Spitze des Armes sitzenden Greifers, wenn <strong>der</strong><br />
Roboter mit ˙ϕ = Ω = konst. um die z-Achse rotiert, <strong>der</strong> Arm sich mit<br />
˙ψ = Θ = konst. hebt und sich seine Länge gemäß r = l(2 + sin Ωt)<br />
mit <strong>der</strong> Zeit t än<strong>der</strong>t. Am Anfang (t = 0) liegt <strong>der</strong> Greifer auf <strong>der</strong><br />
positiven x − Achse (ϕt=0 = 0, zt=0 = 0). PSfrag replacements<br />
Geg.: l, Ω, Θ.<br />
7. Der Punkt Paul bewegt sich auf <strong>der</strong> Innenfläche eines zylindrischen Rohres<br />
mit dem Radius R. Seine Bahn wird beschrieben durch z(ϕ) = l0ekϕ ,<br />
ϕ(t) = ωt. Das Rohr erstreckt sich in Richtung <strong>der</strong> z-Achse bis zur Höhe<br />
H. Gegeben sind die Konstanten ω, l0, k, R und H.<br />
l<br />
PSfrag replacements<br />
Bestimme den Geschwindigkeits- und Beschleunigungsvektor des Punktes<br />
beim Verlassen des Rohres in kartesischen Koordinaten!<br />
R<br />
x<br />
x<br />
z<br />
α<br />
r<br />
Paul<br />
z<br />
tl<br />
ϕ<br />
ϕ<br />
ψ<br />
t<br />
y<br />
H<br />
y<br />
g
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 3<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
8. Die beiden oberen starr miteinein<strong>der</strong> verbundenen Riemenscheiben mit<br />
den Radien r und R drehen sich mit <strong>der</strong> Winkelgeschwindigkeit ω. Das<br />
Seil läuft auf allen drei Riemenscheiben ohne Schlupf, seine Abschnitte<br />
zwischen den Riemenscheiben hängen genau senkrecht. Der Drehpunkt<br />
S <strong>der</strong> unteren Scheibe ist vertikal geführt.<br />
Berechne die Geschwindigkeit des Punktes S!<br />
Geg.: R, r, ω = konst.<br />
9. Ein Rad mit dem Radius R rollt auf einer Ebene.<br />
Zur Zeit t = 0 berührt <strong>der</strong> auf dem Umfang<br />
des Rades befestigte Punkt Titus die Ebene<br />
und zwar genau im Ursprung des ortsfesten<br />
kartesischen Koordinatensystems.<br />
Bestimme Titus’ Orts-, Geschwindigkeits-<br />
PSfrag replacements<br />
und<br />
Beschleunigungsvektor in Bezug auf das ortsfeste<br />
Koordinatensystem als Funktion <strong>der</strong><br />
Zeit t in kartesischen Koordinaten.<br />
Geg.: R, d<br />
dt<br />
PSfrag replacements<br />
y<br />
Titus<br />
ω<br />
S<br />
r R<br />
ϕ(t) = ˙ϕ = ©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©�©<br />
�������������������������������������������<br />
konst.. x<br />
Tip: Bestimme zuerst die Koordinaten des Mittelpunktes des Rades zu einer beliebigen Zeit t und dann<br />
den Abstand in x- und y-Richtung des Punktes PSfrag Titus replacements von diesem Mittelpunkt. Daraus kann dann <strong>der</strong><br />
Ortsvektor ermittelt werden.<br />
10. Ein Flugzeug steuert mit Hilfe seiner Peilvorrichtung einen<br />
Flughafen an, wird jedoch durch den Wind abgetrieben, <strong>der</strong><br />
mit konstanter Geschwindigkeit vf in Richtung <strong>der</strong> y-Achse<br />
weht. Das Flugzeug hat die Relativgeschwindigkeit vr. Gesucht<br />
ist die wahre, ebene Bahn des Flugzeuges, wenn es vom Punkt<br />
P0(x0, y0) ab Kurs auf die Peilanlage des Flughafens hält, die<br />
im Ursprung O liegen möge.<br />
y<br />
O<br />
θ<br />
ϕ<br />
vr<br />
¤£¤ ¢£¢£¢<br />
R<br />
P(x, y)<br />
11. Eine mit <strong>der</strong> Zeit t verän<strong>der</strong>liche vektorielle Größe V an einem durch seine Koordinaten r, ϕ und<br />
ψ bestimmten Punkt P wird durch den Vektor v(t) beschrieben. Dieser Vektor v(t) soll durch seine<br />
Koordinaten vr(t), vϕ(t) und vψ(t) im raumfesten Kugelkoordinatensystem dargestellt werden.<br />
Die Basis des Kugelkoordinatensystems sei gegeben durch die Einheitsvektoren<br />
⎛<br />
cos ϕ cos ψ<br />
er = ⎝ sin ϕ cos ψ<br />
⎞<br />
⎠ ,<br />
⎛<br />
− sin ϕ<br />
eϕ = ⎝ cos ϕ<br />
⎞<br />
⎠ und<br />
⎛<br />
− cos ϕ sin ψ<br />
eψ = ⎝ − sin ϕ sin ψ<br />
sin ψ<br />
0<br />
cos ψ<br />
<br />
<br />
x<br />
¥<br />
¥<br />
¥<br />
¦<br />
¦<br />
¦<br />
¦<br />
§<br />
§<br />
§<br />
§<br />
¨<br />
¨<br />
¨<br />
¨<br />
¥<br />
⎞<br />
⎠<br />
¡<br />
¡<br />
¡<br />
¡<br />
<br />
(a) Der Punkt P verän<strong>der</strong>t seine Lage im Raum nicht. Berechne <strong>für</strong> diesen Fall die Kugelkoordinaten<br />
<strong>der</strong> ersten Ableitung nach <strong>der</strong> Zeit ˙v(t) des Vektors v(t). Schreibe ˙v(t) als Linearkombination <strong>der</strong><br />
Basisvektoren er, eϕ und eψ!<br />
(b) Nun soll sich <strong>der</strong> Punkt P bewegen, seine Koordinaten sind also Funktionen <strong>der</strong> Zeit. Gib <strong>für</strong><br />
diesen Fall die erste und zweite Ableitung nach <strong>der</strong> Zeit ˙v(t) und ¨v(t) in Kugelkoordinaten an!<br />
vf<br />
.
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 4<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
12. Das skizzierte System wird von einer Zahnstange angetrieben,<br />
die sich gemäß s(t) = v0t geradlinig bewegt. Auf <strong>der</strong> senkrechten<br />
a<br />
mit ˙α = ω rotierenden Scheibe ist <strong>der</strong> PunktPSfrag P befestigt. replacements α P<br />
Berechnen Sie Orts-, Geschwindigkeits- und Beschleunigungsvektor<br />
des Punktes P als Linearkombination <strong>der</strong> mitgedrehten<br />
Basisvektoren e r, e ϕ und e z bezüglich des ruhenden Bezugssystems<br />
mit Ursprung O.<br />
Geg.: R, h , a, s(t), ω = konst., α(0) = 0, ϕ(0) = 0<br />
13. Harry Coolman will mit seiner Turbo-Eagle“ ei-<br />
”<br />
ne Faßrolle fliegen. Das ist eigentlich nicht zulässig<br />
und deshalb fragt er dich, was er und seine Mühle<br />
dabei wohl <strong>für</strong> Belastungen (Beschleunigungen)<br />
zu erwarten haben.<br />
Die Flugbahn soll eine Schraubenlinie mit konstantem<br />
Geschwindigkeitsbetrag v, Radius R und<br />
Steigungswinkel (90◦ PSfrag replacements<br />
y<br />
− α) beschreiben. Das Flugk1<br />
zeug liegt dabei immer so in <strong>der</strong> Luft, daß <strong>der</strong>k2<br />
Kopf des Piloten zur Mittellinie <strong>der</strong> Schraubenlinie<br />
zeigt.<br />
(a) Wir definieren ein erdfestes kartesisches Koordinatensystem, dessen x-Achse auf <strong>der</strong> Mittellinie <strong>der</strong><br />
Schraubenlinie liegt, z weist nach oben. Schreibe<br />
PSfrag<br />
den Ortsvektor<br />
replacements<br />
x(t) des Flugzeugs als Funktion<br />
<strong>der</strong> Zeit t in diesen Koordinaten, wenn x(t = 0) = −R ey.<br />
z<br />
Hinweis: Auf die y-z-Ebene projiziert (wenn man die x-Komponente erst y<br />
mal außer acht läßt) beschreibt die Bewegung eine Kreisbahn mit konstanter<br />
Winkelgeschwindigkeit ϕ · = k2/R und dem Radius R. Die x-Komponente<br />
<strong>der</strong> Bewegung stellt eine gleichmäßige Bewegung dar mit <strong>der</strong> konstanten k2 R<br />
Geschwindigkeit k1. Betrachtet man den Geschwindigkeitsvektor z.B. zur<br />
Zeit t = 0 in <strong>der</strong> x-z-Ebene, so kann man seine Komponenten k1 und k2 aus<br />
<strong>der</strong> Skizze links ablesen.<br />
(b) Das flugzeugfeste Koordinatensystem ist mit ϕ(t) =<br />
⎛<br />
e1(t) = ⎝<br />
cos α<br />
sin α sin ϕ(t)<br />
sin α cos ϕ(t)<br />
⎞<br />
⎠<br />
<br />
⎛<br />
, e2(t) = ⎝<br />
z<br />
x<br />
e ϕ<br />
R<br />
O<br />
v sin α<br />
R t gegeben durch<br />
− sin α<br />
cos α sin ϕ(t)<br />
cos α cos ϕ(t)<br />
⎞<br />
⎠<br />
<br />
e z<br />
α<br />
ϕ<br />
v<br />
k1<br />
e r<br />
, e3(t) = ⎝<br />
(Aus <strong>der</strong> Sicht des Piloten zeigt e1 nach vorne, e2 nach rechts und e3 nach unten.)<br />
⎛<br />
v<br />
h<br />
R<br />
s(t)<br />
α<br />
x<br />
0<br />
− cos ϕ(t)<br />
sin ϕ(t)<br />
Bestimme die Ableitungen dieser Basisvektoren nach <strong>der</strong> Zeit in flugzeugfesten Koordinaten (also<br />
als Linearkombination <strong>der</strong> flugzeugfesten Basis).<br />
(c) Berechne die flugzeugfesten Koordinaten des Ortsvektors aus Teilaufgabe (a). Das Ergebnis sieht<br />
etwa so aus: x = . . . e1 + . . . e2 + Re3.<br />
(d) Leite den Ortsvektor aus Teilaufgabe (c) zweimal nach <strong>der</strong> Zeit ab. Zeige dabei, daß die Geschwindigkeit<br />
im flugzeugfesten Koordinatensystem wie erwartet nur eine Komponente in e1-Richtung<br />
hat.<br />
⎞<br />
⎠<br />
<br />
.
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 5<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
14. In einem Turm ist in Punkt A eine Maus, im<br />
Mittelpunkt O eine Katze. Die Maus rennt mit<br />
<strong>der</strong> konstanten Geschwindigkeit vM entlang <strong>der</strong><br />
Turmmauer, um das rettende Loch L zu erreichen.<br />
Die Katze verfolgt die Maus mit <strong>der</strong> konstanten<br />
Geschwindigkeit vK und beschreibt dabei<br />
eine Bahn, die durch die Archimedische Spirale<br />
rK(ϕK) = R<br />
π ϕK beschrieben wird.<br />
L<br />
PSfrag replacements<br />
Geg.: R, vM , � √ 1 + x 2 dx = 1<br />
2 [x√ 1 + x 2 +<br />
arsinh x]<br />
(a) Gib die Geschwindigkeits- und Beschleunigungsvektoren<br />
von Katze und Maus als Linearkombination<br />
aus e r , und e ϕ an! Nimm<br />
dabei die Winkelgeschwindigkeit <strong>der</strong> Katze<br />
ϕK(t) als eine gegebene Funktion <strong>der</strong> Zeit<br />
an.<br />
(b) Wie groß muß die Bahngeschwindigkeit vK<br />
<strong>der</strong> Katze sein, damit sie die Maus am Loch<br />
erwischt?<br />
15. Berechnen Sie bezüglich des Koordinatenursprungs O<br />
(a) den Ortsvektor zum Punkt P (setzen Sie dabei<br />
s(t) = v0t und α(t) = Ωt ein),<br />
PSfrag replacements<br />
(b) seinen Geschwindigkeitsvektor,<br />
(c) seinen Beschleunigungsvektor und<br />
(d) den Drehimpuls <strong>der</strong> Punktmasse m im Punkt P!<br />
(e) Bestimmen Sie den Vektor <strong>der</strong> Reaktionskraft, die<br />
auf die Punktmasse wirkt (Gravitation wird vernachlässigt)!<br />
Geg.: H, L, h, b, ω = konst., s(t) = v0t, α(t) = Ωt, m<br />
16. Eine Scheibe dreht sich um die Kante B-C mit dem Drehwinkel ϕ(t) =<br />
ωt. Der Punkt Petra bewegt sich auf <strong>der</strong> Scheibe von A nach B mit <strong>der</strong><br />
konstanten Geschwindigkeit v0 relativ zur Scheibe.<br />
Berechne die Vektoren und Beträge <strong>der</strong> (Absolut-) Geschwindigkeit und<br />
(Absolut-) Beschleunigung<br />
PSfrag replacements<br />
(a) mit einer raumfesten, konstanten kartesischen Basis.<br />
(b) mit einer körperfesten (mit <strong>der</strong> Scheibe) mitgedrehten<br />
Zylin<strong>der</strong>koordinaten-Basis.<br />
Geg.: b, h, ω, v0<br />
H<br />
e z<br />
e ϕ<br />
R<br />
ω<br />
O<br />
O<br />
A<br />
B<br />
C<br />
rK<br />
α(t)<br />
L<br />
e r<br />
ϕ<br />
ϕK<br />
b<br />
P<br />
s(t)<br />
b<br />
Petra<br />
v0<br />
ϕM<br />
m<br />
A<br />
A<br />
h<br />
h
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 6<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
17. Der Punkt Paul bewegt sich auf <strong>der</strong> Innenfläche<br />
eines zylindrischen Rohres mit dem Radius R. Seine<br />
Bahn wird beschrieben durch z(ϕ) = l0ekϕ ,<br />
ϕ(t) = ωt. Gegeben sind die Konstanten ω, l0,<br />
k und R.<br />
PSfrag replacements<br />
Bestimme zu je<strong>der</strong> Zeit t den Orts-,<br />
Geschwindigkeits- und Beschleunigungsvektor<br />
des Punktes als Linearkombination aus e r , e ϕ<br />
und e z ! Bestimme außerdem die kartesischen<br />
Koordinaten des Beschleunigungsvektors!<br />
18. Ein Punkt bewegt sich auf <strong>der</strong> ebenen Bahn<br />
r(ϕ) = a(1 + ϕ<br />
) mit 0 < ϕ < 2π , ϕ = c t.<br />
2π<br />
a und c sind positive Konstanten, PSfrag Zeit t replacements<br />
> 0. Gib<br />
Geschwindigkeits- und Beschleunigungsvektor in <strong>der</strong> Basis<br />
< er, eϕ > und in <strong>der</strong> Basis < ex, ey > an!<br />
19. Eine starre Scheibe rotiert in <strong>der</strong> x-y- bzw.<br />
r-ϕ-Ebene um den Ursprung. Die Winkelgeschwindigkeit<br />
˙ϕ(t) = ω(t) ist eine als bekannt<br />
vorausgesetzte Funktion <strong>der</strong> Zeit t.<br />
Gib den Orts-, Geschwindigkeits- und Beschleunigungsvektor<br />
eines durch seine momentanen<br />
Koordinaten r und ϕ identifizierten<br />
Punktes auf <strong>der</strong> Scheibe sowohl mit einer<br />
kartesischen Basis als auch mit e r und e ϕ an!<br />
PSfrag replacements<br />
20. Ein Schwimmkörper K soll von einem Ufer eines<br />
mit <strong>der</strong> Geschwindigkeit vS dahinfließenden<br />
Stromes <strong>der</strong> Breite b zum an<strong>der</strong>en Ufer dadurch<br />
beför<strong>der</strong>t werden, daß er mittels eines im Punkt<br />
O befestigten Taues herübergezogen wird. Man er-<br />
PSfrag replacements<br />
mittle unter <strong>der</strong> Voraussetzung einer konstanten<br />
Verkürzungsgeschwindigkeit vT des Taues die Gleichung<br />
<strong>der</strong> Bahnkurve des Schwimmkörpers.<br />
b<br />
ω<br />
O<br />
vT<br />
R<br />
y<br />
y<br />
x<br />
Paul<br />
r<br />
r<br />
ϕ<br />
r<br />
z<br />
ϕ<br />
ϕ<br />
K<br />
ϕ<br />
a<br />
y<br />
vS<br />
x<br />
x
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 7<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
21. Für das skizzierte Planetengetriebe, das aus einem Sonnenrad (a1, ω1),<br />
einem Hohlrad (a2, ω2) und Planetenrä<strong>der</strong>n besteht, ermittle man<br />
(a) die Bahngeschwindigkeit v <strong>für</strong> den Mittelpunkt des Planetenrades,<br />
(b) die Winkelgeschwindigkeit ω des Plantenrades,<br />
(c) die Winkelgeschwindigkeit ω ∗ des Plantenradträgers,<br />
geg.: a1, a2, ω1, ω2.<br />
22. Das Sonnenrad A bewege sich mit <strong>der</strong> Winkelgeschwindigkeit ωA und <strong>der</strong><br />
Verbindungshebel C mit ωC. Das Planetenrad bewegt sich rein rollend. Ermittle<br />
den Geschwindigkeitsvektor des Punktes P, <strong>der</strong> sich auf dem Planetenrad<br />
B befindet.<br />
Geg.: r1, r2, a, ωA, ωC, ψ.<br />
PSfrag replacements<br />
23. Das dargestellte ebene Getriebe besteht aus den<br />
Zahnrä<strong>der</strong>n 1 und 2, dem Winkelrahmen 3 und <strong>der</strong><br />
Schubstange 4. Der Winkelrahmen 3 rotiert mit <strong>der</strong><br />
Winkelgeschwindigkeit ω3 um den Lagerpunkt A. Das<br />
im Punkt C mit dem Rahmen verbundene Zahnrad<br />
2 rollt infolgedessen im Punkt B auf dem blockierten<br />
Zahnrad 1 ab. Die Schubstange 4 ist in E gelenkig mit<br />
dem Winkelrahmen 3 sowie über die Schiebehülse D mit<br />
Zahnrad 2 verbunden. Alle Teile verhalten sich starr.<br />
(a) Zeigen Sie, dass die Winkelgeschwindigkeit des Zahnrades 2<br />
ω2 = 3<br />
2ω beträgt.<br />
PSfrag replacements<br />
(b) Berechnen sie die Winkelgeschwindigkeit ω4 <strong>der</strong> Schubstange 4.<br />
(c) Berechnen Sie die Relativgeschwindigkeit v (rel)<br />
D<br />
Geg.: R, ω3 = ω<br />
24. Ein Hebelwerkzeug besteht aus drei masselosen<br />
Starrkörpern: die Schubstange 1 gleitet auf dem<br />
reibungsfreien und festen Untergrund mit <strong>der</strong><br />
Geschwindigkeit v1 und <strong>der</strong> Beschleunigung a1;<br />
das zum Hubausleger 2 gehörende, in B drehbar<br />
gelagerte Rad rollt in A ohne Schlupf auf<br />
<strong>der</strong> Stange 1 ab; <strong>der</strong> stützende Winkelrahmen<br />
3 ist im Punkt C drehbar mit dem Hubausleger<br />
2 verbunden und gleitet in D, über eine gelenkige<br />
Schiebehülse gekoppelt, reibungsfrei auf<br />
<strong>der</strong> Schubstange 1. Die folgenden Aufgabenteile<br />
beziehen sich auf die momentane Lage des Systems.<br />
x<br />
2<br />
D<br />
R<br />
C<br />
in <strong>der</strong> Schiebehülse D.<br />
6r<br />
3r<br />
C<br />
2<br />
a1, v1<br />
B<br />
y<br />
6r 10r<br />
A<br />
4<br />
2R<br />
3<br />
B<br />
E<br />
ω3<br />
y<br />
3<br />
A<br />
R<br />
1<br />
4R<br />
D reibungsfrei<br />
(a) Zeigen Sie, dass sich die Winkelgeschwindigkeiten <strong>der</strong> Elemente 2 und 3 zu ω2 = − 1 v<br />
3 · r bzw. zu<br />
ω3 = − 1 v<br />
8 · r ergeben, und berechnen Sie die Relativgeschwindigkeit vD,rel zwischen <strong>der</strong> Schiebehülse<br />
in D und <strong>der</strong> Schubstange 1.<br />
(b) Berechnen Sie die Winkelbeschleunigung ˙ω2 des Hubauslegers.<br />
(c) Konstruieren Sie den Momentanpol G3 des Rahmens 3.<br />
Geg.: r, |v 1 | = v, |a 1 | = a,<br />
x<br />
x<br />
1
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 8<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
2 Grundlagen Kinetik<br />
25. Ein mechanischer Basketballspieler wirft den Ball immer unter dem<br />
Winkel α ab.<br />
(a) Wie groß muß die Abwurfgeschwindigkeit sein,<br />
PSfrag<br />
damit<br />
replacements<br />
<strong>der</strong> Ball<br />
den Korb trifft?<br />
(b) Ab welcher minimalen Entfernung d von <strong>der</strong> Wand hat er keine<br />
Möglichkeit mehr zu treffen?<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡<br />
Geg.: α, h, d, Erdbeschleunigung ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
g<br />
26. Bestimmen Sie <strong>für</strong> das skizzierte System mit den<br />
Newtonschen Gesetzen die Lage <strong>der</strong> Kugel zu einem<br />
beliebigen Zeitpunkt t.<br />
Das Seil und die Umlenkrolle sollen als masselos<br />
und nicht dehnbar angenommen werden. Der<br />
Strömungswi<strong>der</strong>stand <strong>der</strong> Kugel ist proportional zur<br />
Geschwindigkeit mit dem Wi<strong>der</strong>standskoeffizienten k.<br />
PSfrag replacements<br />
Der Gleitreibbeiwert zwischen dem zweiten Körper<br />
und seiner Unterlage ist µ. Der hydrostatische Auftrieb<br />
<strong>der</strong> Kugel soll vernachlässigt werden. Zur Zeit<br />
t = 0 ruht das System bei x = 0. Danach sinkt die<br />
x<br />
Kugel senkrecht nach unten.<br />
Geg.: m1, m2, k, µ, α, g<br />
Tip: Kürzen Sie die Koeffizienten <strong>der</strong> Differentialgleichung<br />
ab, um sich Schreibarbeit zu sparen.<br />
v0<br />
α<br />
d<br />
h<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥ §¤§¤§¤§¤§¤§¤§¤§¤§<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥ ¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
m1<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥ ¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥ ¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
α<br />
g<br />
g<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
m2<br />
§¤§¤§¤§¤§¤§¤§¤§¤§<br />
¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
µ<br />
27. Auf einer als starr und masselos anzusehenden Stange kann die Masse m, die<br />
mittels einer idealen Fe<strong>der</strong> mit dem Drehpunkt verbunden ist, reibungsfrei glei-<br />
c<br />
ten. Es sei l0 die Fe<strong>der</strong>länge im spannungslosen Zustand. Ein Antrieb im Dreh-<br />
PSfrag replacements<br />
punkt <strong>der</strong> Stange regt mit dem Moment M(t) = M0 sin Ωt das System zum µ = 0<br />
Schwingen an.<br />
Stelle die Bewegungsdifferentialgleichung auf! Berücksichtige die Schwerkraft.<br />
Geg.: m, l0, M0, Ω, g, c<br />
28. Zwei Massen M und m sind über ein<br />
Seil miteinan<strong>der</strong> verbunden. Zum Zeitpunkt<br />
(t = 0) besitzt das System die<br />
Anfangsgeschwindigkeit v = 0. Der<br />
Klotz M gleitet von PSfrag A nach replacements B reibungsfrei.<br />
Von B nach C herrscht <strong>der</strong><br />
Reibungskoeffizient µ. Wie groß muß<br />
µ sein, damit <strong>der</strong> Klotz genau an <strong>der</strong><br />
Stelle C zum Halten kommt?<br />
Geg.: l, M = 2m, m, µ, g<br />
M<br />
A B C<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
µ = 0 µ �= 0<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
l 10l<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
���������������������������<br />
m<br />
m<br />
�©� ¨©¨<br />
g<br />
M(t)
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 9<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
29. Drei gleiche Massen<br />
m1 = m2 = m3 = m<br />
sind mit Seilen über<br />
masselose Rollen ver-<br />
bunden. PSfrag Man replacements bestim-<br />
me die Bewegungsgleichungen<br />
<strong>für</strong> den<br />
Fall, daß sich m3 nach<br />
unten bewegt!<br />
m1<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡<br />
α<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ Geg: α, µ, g, m<br />
30. In dem skizzierten System gleitet die Masse M die Rampe hinab. Auf M<br />
bewegt sich reibungsfrei eine zweite Masse m.<br />
PSfrag replacements<br />
Gesucht ist die Beschleunigung von M.<br />
Geg.: M, m, µG, α, g<br />
31. Wie lautet die Gleichung <strong>der</strong> Bahnkurve einer Masse m, die im<br />
Schwerefeld <strong>der</strong> Erde zum Zeitpunkt t = 0 mit <strong>der</strong> Anfangsgeschwindigkeit<br />
v0 unter dem Winkel α bei x0, y0 abgeworfen wird?<br />
Berücksichtige den Luftwi<strong>der</strong>stand nach dem Gesetz PSfragFreplacements W = −kv<br />
mit k ≥ 0!<br />
32. Auf <strong>der</strong> skizzierten Scheibe, die mit <strong>der</strong> konstanten Winkelgeschwindigkeit<br />
ω rotiert, gleitet die Masse m in einer diametralen<br />
Führung. Zwischen <strong>der</strong> Masse m und ihrer Führung<br />
herrscht <strong>der</strong> Reibkoeffizient µ. Die Scheibe liegt in einer horizontalen<br />
Ebene, d. h. die Gewichtskraft wirkt in Richtung<br />
<strong>der</strong> Drehachse.<br />
Zum Zeitpunkt t = 0 hat die Masse m keine Relativgeschwindigkeit<br />
zur Scheibe und den Abstand r0 von PSfrag <strong>der</strong> replacements<br />
Drehachse<br />
<strong>der</strong> Scheibe. Stellen Sie <strong>für</strong> diese Annahmen die Bewegungsdifferentialgleichung<br />
<strong>für</strong> die Masse m auf!<br />
Geg.: m, r0, ω, µ<br />
33. Eine Punktmasse m gleitet reibungsfrei auf einer Ebene. Sie ist an<br />
einem Seil befestigt, das mit <strong>der</strong> konstanten Geschwindigkeit v zum<br />
Punkt P gezogen wird. Zur Zeit t = 0 beträgt die Umfangskompo-<br />
PSfrag replacements<br />
nente <strong>der</strong> Geschwindigkeit <strong>der</strong> Punktmasse ω0l0 und ihr Abstand<br />
zum Punkt P l0.<br />
Bestimme die Seilkraft!<br />
Geg.: m, v, l0, ω0<br />
µ<br />
m2<br />
µ<br />
y<br />
y0<br />
v<br />
M<br />
g<br />
m3<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
α<br />
2α<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
FW<br />
v0<br />
x0<br />
α<br />
¦§¦§¦ ¨§¨§¨ ¦§¦§¦<br />
P<br />
˙x<br />
m<br />
ω<br />
l0<br />
mg<br />
g<br />
m<br />
µ = 0<br />
µ = µG<br />
v<br />
m<br />
x<br />
µ
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 10<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
34. Die Aufhängevorrichtung (Masse m1) eines ebenen Pendels<br />
mit <strong>der</strong> Länge l und <strong>der</strong> Pendelmasse m2 gleitet rei-<br />
PSfrag replacements<br />
bungsfrei auf einer horizontalen Schiene.<br />
Ermitteln Sie die Bewegungsdifferentialgleichungen <strong>für</strong><br />
die Massen m1 und m2.<br />
Geg.: m1, m2, l, g<br />
35. Ein Körper (Masse m1) gleitet reibungsfrei in vertikaler Richtung und<br />
ist über eine masselose Stange (Länge l) mit einer Punktmasse PSfrag replacements m2 gelenkig<br />
verbunden. Die Punktmasse ist über eine weitere Stange (Länge<br />
l) gelenkig an die Umgebung gekoppelt.<br />
glatt<br />
(a) Wieviele Freiheitsgrade hat das System?<br />
(b) Bestimmen Sie die Bewegungsdifferentialgleichung <strong>für</strong> das System.<br />
Geg.: l, g, m1, m2<br />
36. Auf einer schiefen Ebene bewegt sich reibungsfrei ein<br />
Körper <strong>der</strong> Masse m, Bewegungskoordinate s, infolge<br />
<strong>der</strong> Schwerkraft abwärts. In einer radialen Bohrung ist<br />
ein Zylin<strong>der</strong> <strong>der</strong> Masse M, <strong>der</strong> Relativkoordinate x, elastisch<br />
angeordnet, <strong>der</strong> sich ebenfalls reibungsfrei bewegen<br />
kann. Für die entspannte Lage <strong>der</strong> Fe<strong>der</strong>n gilt s = 0<br />
und x = 0. Bestimmen Sie die Bewegungsdifferentialgleichungen<br />
<strong>für</strong> die generalisierten Koordinaten s und<br />
x.<br />
Geg.: m, M, c, α, g<br />
37. Das untersuchte Gerät besteht aus einer Masse<br />
m, drei Stäben und zwei Rollen. Die Massen <strong>der</strong><br />
Stäbe und <strong>der</strong> Rollen seien vernachlässigbar klein. Stabquerschnitt<br />
Die Stäbe haben einen quadratischen Querschnitt<br />
b<br />
(Kantenlänge b). Das Gerät bewegt<br />
PSfrag<br />
sich<br />
replacements<br />
wie abgebildet<br />
auf einer Kreisbahn mit konstanter Winkelgeschwindigkeit<br />
ω. Die Bewegung findet in einer<br />
Ebene statt.<br />
b<br />
(a) Berechnen Sie die kleinste Winkelgeschwindigkeit<br />
ω, bei <strong>der</strong> es zum Knicken <strong>der</strong> Stäbe<br />
kommt.<br />
(b) Setzen Sie nun folgende Zahlenwerte ein m =<br />
100 kg, l = 0,5 m, E = 200 GPa, b = 10 mm,<br />
r = 0,3 m<br />
Geg.: m, l, E, b, r<br />
38. Zwei Autos stoßen unter einem Winkel α zusammen und rutschen ineinan<strong>der</strong> verkeilt nach dem Zusammenstoß<br />
mit blockierten Rä<strong>der</strong>n eine Strecke XR, bis sie zum Stillstand kommen.<br />
Geg.: Massen und Geschwindigkeitsbeträge <strong>der</strong> Autos vor dem Zusammenstoß m1, v1, m2 und v2,<br />
Reibbeiwert beim Rutschen µ, α<br />
s<br />
r<br />
y<br />
m1<br />
ϕ l<br />
ϕ<br />
l<br />
30 o<br />
m1<br />
l<br />
ω<br />
m<br />
m2<br />
l<br />
g<br />
x<br />
g<br />
m2
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 11<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
(a) In welche Richtung rutschen die Autos nach dem Zusammenstoß?<br />
(b) Wie lang ist die Rutschstrecke XR?<br />
PSfrag replacements<br />
(c) Ein Golf m1 = 1000kg und ein Mercedes m2 = 2000kg stoßen<br />
unter α = 45 ◦ zusammen. Der Golf hat seine Bewegungsrichtung<br />
beim Zusammenprall um β = 30 ◦ geän<strong>der</strong>t. Aus <strong>der</strong> Rutschstrecke<br />
konnte die Geschwindigkeit <strong>der</strong> ineinan<strong>der</strong> verkeilten Autos<br />
unmittelbar nach dem Zusammenstoß bestimmt werden, sie<br />
betrug 20 m<br />
s .<br />
Wie schnell waren die Autos vor dem Zusammenstoß?<br />
39. In einem Duschkopf wird das Wasser rechtwinklig umgelenkt. Dadurch<br />
än<strong>der</strong>t sich <strong>der</strong> Impuls des Wassers sowohl in x- als auch in<br />
y-Richtung. Berechne die Kraft (Betrag und Richtung), die das Wasser<br />
auf den Duschkopf ausübt, wenn pro Sekunde 0,2 l Wasser ausströmen<br />
(Volumenstrom ˙ V = 0,2 · 10−3m3 /s). Der Rohrquerschnitt<br />
A beträgt 2 cm2 PSfrag replacements<br />
. Reibung und Gravitation sollen vernachlässigt werden.<br />
Hinweis: Ein Liter Wasser habe die Masse 1 kg. Damit kann <strong>der</strong> Massenstrom dm<br />
dt<br />
A<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
m1<br />
v<br />
y<br />
α<br />
x<br />
m2<br />
XR<br />
β<br />
aus dem Volumenstrom<br />
bestimmt werden. Der Betrag <strong>der</strong> Geschwindigkeit v des Wassers ergibt sich aus <strong>der</strong> Beziehung <strong>für</strong> den Volumenstrom<br />
˙ V = Av. Der Betrag <strong>der</strong> Geschwindigkeit än<strong>der</strong>t sich durch die Umlenkung nicht. Betrachte eine<br />
zusammenhängende Gruppe von Wasserteilchen mit <strong>der</strong> Masse m auf ihrem Weg durch die Krümmung. In<br />
dieser Betrachtung PSfrag replacements kann so getan werden, als ob die Umlenkung in einer scharfen Ecke erfolgt, ein Teilchen<br />
also entwe<strong>der</strong> noch gar nicht o<strong>der</strong> schon vollständig umgelenkt ist.<br />
y<br />
x<br />
m<br />
¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢<br />
¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢<br />
£ £ £ £ £ £ £ £ £ £ £<br />
£ £ £ £ £ £ £ £ £ £ £<br />
¢<br />
¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢<br />
¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢<br />
¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢<br />
¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢ ¢<br />
£ £ £ £ £ £ £ £ £ £ £<br />
£ £ £ £ £ £ £ £ £ £ £<br />
£ £ £ £ £ £ £ £ £ £ £<br />
£ £ £ £ £ £ £ £ £ £ £<br />
¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤<br />
¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤<br />
¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤<br />
¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤<br />
¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥<br />
¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥<br />
¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥<br />
¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥<br />
¢<br />
¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤<br />
¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤<br />
¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤ ¤<br />
¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥<br />
¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥<br />
¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥ ¥<br />
¤<br />
¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦<br />
¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦<br />
§ § § § § § § § § § §<br />
§ § § § § § § § § § §<br />
¦<br />
¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦<br />
¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦<br />
¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦<br />
¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦<br />
§ § § § § § § § § § §<br />
§ § § § § § § § § § §<br />
§ § § § § § § § § § §<br />
§ § § § § § § § § § §<br />
¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨<br />
¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨<br />
¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨<br />
¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨<br />
© © © © © © © © © © ©<br />
© © © © © © © © © © ©<br />
© © © © © © © © © © ©<br />
© © © © © © © © © © ©<br />
¦<br />
¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨<br />
¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨<br />
¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨ ¨<br />
© © © © © © © © © © ©<br />
© © © © © © © © © © ©<br />
© © © © © © © © © © ©<br />
¨<br />
t1 t2 t3<br />
� � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
�<br />
� � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
�<br />
Schreibe den Impuls dieser Masse m zu einem beliebigen Zeitpunkt auf: vor (t1), während (t2) und nach <strong>der</strong><br />
Umlenkung (t3). Über den Impulssatz kannst Du die Kraft bestimmen, die das Rohr auf dieses Wasserpaket<br />
ausüben muß, um die Impulsän<strong>der</strong>ung und damit die Umlenkung zu erzwingen.<br />
Zu jedem Zeitpunkt kann man sich eine zusammenhängende Gruppe von Wasserteilchen denken, die gerade<br />
umgelenkt wird. Deshalb kann man aus <strong>der</strong> Kraft zur Umlenkung eines Pakets auf die Kraft schließen, die <strong>der</strong><br />
Wasserstrahl als ganzes auf den Duschkopf ausübt.<br />
40. Eine Kugel <strong>der</strong> Masse m fliegt mit einer Geschwindigkeit v0. Sie explodiert<br />
in zwei Teile. Die Einzelteile haben die Massen m1 bzw. m2.<br />
Sie fliegen mit den Geschwindigkeiten v1 bzw. v2 unter den Winkeln<br />
α1 bzw. α2 zur ursprünglichen Flugrichtung auseinan<strong>der</strong>.<br />
PSfrag replacements<br />
Die Richtungen α1 und α2 sowie die Geschwindigkeit v1 des einen<br />
Teils unmittelbar nach <strong>der</strong> Explosion werden gemessen. Bestimme<br />
die Massen <strong>der</strong> Teile und die nicht gemessene Geschwindigkeit v2!<br />
Geg.: m, v0, α1 = π<br />
, α2, v1<br />
2<br />
� � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
� � � � � � � � � � �<br />
�<br />
41. Ein Seil <strong>der</strong> Länge L mit <strong>der</strong> Masse M liegt auf dem Boden. Nun soll es an einem Ende hochgezogen<br />
werden. Welche Kraft H ist nötig, um dieses Ende mit <strong>der</strong> konstanten Beschleunigung a<br />
nach oben zu heben? Es soll angenommen werden, daß das Seil bis zum Boden immer senkrecht<br />
hängt.<br />
Geg.: L, M, a<br />
m<br />
v0<br />
v1<br />
m1<br />
PSfrag replacements<br />
α1<br />
α2<br />
m2<br />
���������������<br />
�����������������<br />
42. Aus einem anfänglich ruhenden Boot werden zwei schwere Steine horizontal nach hinten geworfen. Das Boot<br />
hat die Gesamtmasse m0 (einschließlich <strong>der</strong> Steine), die Steine haben die Massen m1 und m2. Die Reibung des<br />
Bootes soll vernachlässigt werden. Die Abwurfgeschwindigkeit (relativ zum Boot) sei w.<br />
Wie groß ist die Geschwindigkeit des Bootes nach dem Abwerfen, wenn<br />
(a) die beiden Steine gleichzeitig, bzw.<br />
(b) zuerst die Masse m1 und dann die Masse m2<br />
geworfen werden?<br />
Geg.: m0, m1, m2, w<br />
H<br />
v2
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 12<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
43. Um die Bewegungsgleichungen <strong>für</strong> das skizzierte System zu bestimmen,<br />
soll angenommen werden, dass die Seile masselos und undehnbar<br />
sind und dass abgesehen vom Gleiten <strong>der</strong> Masse m5 keine Reibungsverluste<br />
auftreten.<br />
(a) Schneide die einzelnen Massen frei und trage alle äußeren Kräfte<br />
und Momente an.<br />
(b) Schreibe <strong>für</strong> jede Masse Impuls- und/o<strong>der</strong> Drallsatz auf, je nachdem,<br />
was <strong>für</strong> die Berechnung <strong>der</strong> Bewegung relevant sein kann.<br />
(c) Gib die nötigen kinematischen Zusatzbedingungen an.<br />
(d) Setze alle Massen und alle Radien gleich: mi = m, rj = r.<br />
Reduziere das Gleichungssystem <strong>für</strong> diesen Spezialfall auf zwei<br />
Gleichungen <strong>für</strong> ϕ1 und ϕ2.<br />
Geg.: mi(i = 1 . . . 5), rj(j = 1 . . . 3), µ, PSfrag M0 replacements<br />
44. Mit Hilfe <strong>der</strong> skizzierten Vorrichtung soll die Last mit <strong>der</strong><br />
Masse mL angehoben werden. Es wird vorausgesetzt, daß<br />
die Walze auf <strong>der</strong> schiefen Ebene (ohne zu rutschen) rollt<br />
und daß alle senkrecht skizzierten Seilabschnitte genau<br />
senkrecht bleiben.<br />
(a) Schneide die relevanten Teilkörper frei und gib die<br />
dazugehörigen Bewegungsgleichungen an!<br />
(b) Stelle alle auftauchenden kinematischen Größen in<br />
Beziehung zur Beschleunigung <strong>der</strong> Last ¨zL!<br />
(c) Zeige, daß gilt<br />
Man = 5<br />
6 mLr<br />
� � �<br />
377<br />
�<br />
¨zL + g + mr ¨zL + g ,<br />
30<br />
wenn ran = 3<br />
r, r1 = r3 = 2r, R1 = R3 = 3r, r2 =<br />
2<br />
r4 = r, m1 = m3 = m, m4 = 3<br />
9<br />
m, Jan = 5 8 mr2 ,<br />
J1 = J3 = 9<br />
2 mr2 , J2 = J4 = 1<br />
2 mr2 , α = π<br />
6 !<br />
Geg.: mL, ¨zL, g, α, alle Massen mi, alle<br />
Trägheitsmomente Ji, alle Radien ri, Ri.<br />
PSfrag replacements<br />
man, Jan<br />
45. Die skizzierte Kollermühle wird vom Moment Man angetrieben. Die Breite<br />
<strong>der</strong> Rä<strong>der</strong> soll vernachlässigt werden wie auch die Masse und das<br />
Trägheitsmoment <strong>der</strong> senkrechten Antriebsstange.<br />
Wie groß darf das Antriebsmoment höchstens sein, damit die Rä<strong>der</strong> nicht<br />
rutschen?<br />
Geg.: µ0, m1, m2, a, l, g<br />
46. Die beiden oberen Riemenscheiben mit den Radien r und R sind starr miteinein<strong>der</strong><br />
verbunden. Das Seil läuft auf allen drei Riemenscheiben PSfrag ohne replacements Schlupf, g<br />
seine Abschnitte zwischen den Riemenscheiben hängen genau senkrecht. Der<br />
Drehpunkt S <strong>der</strong> unteren Scheibe ist vertikal geführt.<br />
ran<br />
ϕ1<br />
m1<br />
¡<br />
£¡£¡£¡£¡£¡£¡£¡£<br />
£¡£¡£¡£¡£¡£¡£¡£ ¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¢¡¢¡¢ ¡<br />
r1<br />
M0<br />
Man<br />
Berechne die Geschwindigkeit des Punktes S zu einem beliebigen Zeitpunkt t<br />
mit dem Impuls- und Drehimpulssatz.<br />
R1<br />
g<br />
ϕ2<br />
r1<br />
m4<br />
m2<br />
m1, J1<br />
α<br />
m3<br />
¦¡¦¡¦ ¥¡¥¡¥<br />
r2<br />
r3<br />
r2<br />
R3<br />
r3<br />
m4, J4<br />
Geg.: R, r, m1, Θ S 1 , m2, Θ S 2 , g, z(0) = ˙z(0) = §¨§<br />
©¨©<br />
�¨� �¨� �¨� �¨� �¨�<br />
�¨� �¨� �¨� �¨� �¨�<br />
�����<br />
�����<br />
0<br />
x<br />
47. Auf einem keilförmigen starren Körper <strong>der</strong> Masse M, <strong>der</strong> sich rei- y<br />
PSfrag replacements<br />
bungsfrei längs <strong>der</strong> x-Achse bewegen kann, rollt im Schwerefeld eine<br />
homogene Walze <strong>der</strong> Masse m und des Radius b. Am Keil wirkt dabei<br />
eine konstante Kraft F in dessen Bewegungsrichtung.<br />
(a) Ermittle die beiden Bewegungsgleichungen von M und m in x<br />
und ξ!<br />
(b) Wie groß müßte die Kraft F sein, damit die Walze relativ zum<br />
Keil in Ruhe bleibt?<br />
Geg.: M, m, F , β, b, g.<br />
F<br />
x<br />
z<br />
M<br />
b<br />
S<br />
m<br />
β<br />
r4<br />
mL<br />
�¨� �¨�<br />
m5<br />
µ<br />
m2, J2<br />
m3, J3<br />
r R<br />
m1, Θ S 1<br />
g<br />
m2, Θ S 2
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 13<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
48. Durch die Wirkung <strong>der</strong> Schwerkraft setzt sich das dargestellte<br />
System in Bewegung. Bestimme mit Hilfe des Impuls- und<br />
Drallsatzes die Beschleunigung ¨x1 <strong>der</strong> Masse m1 im Moment<br />
des Losrollens unter <strong>der</strong> Annahme, dass m2 rollt und dass<br />
PSfrag replacements<br />
die Verbindungsstange m1–m2 starr ist. Nehmen Sie außerdem<br />
an, dass die Massen m3 und m4 in diesem Moment senkrecht<br />
hängen.<br />
Geg.: r1 = r, r2 = 2r, m1 = m2 = M, m3 = m4 = m, Θ S 2 , µ,<br />
g, α<br />
49. Auf den zwei drehbar PSfrag replacements<br />
gelagerten<br />
Rollen A und B liegt eine dünne<br />
homogene Platte <strong>der</strong> Masse m1<br />
(Dicke <strong>der</strong> Platte vernachlässigbar<br />
klein). Die Rollen rotieren mit sehr<br />
großer Winkelgeschwindigkeit im<br />
skizzierten Richtungssinn. In <strong>der</strong><br />
skizzierten Ausgangslage (x1 =<br />
x2 = 0) liegt die Platte genau mittig<br />
auf den Rollen und die Fe<strong>der</strong><br />
ist entspannt.<br />
x2<br />
m2, JS<br />
r<br />
S<br />
reines Rollen<br />
c<br />
x1<br />
g<br />
m3<br />
r2<br />
r1<br />
m2, Θ S 2<br />
�¡��<br />
�<br />
�¡�<br />
�¡��<br />
�<br />
��<br />
�¡��<br />
�¡��<br />
��<br />
�¡�<br />
m4<br />
x1<br />
m1<br />
α<br />
m1<br />
µ µ<br />
A B<br />
L<br />
g<br />
¡<br />
¢¡¢<br />
¢¡¢<br />
£¡£<br />
£¡£<br />
¤¡¤<br />
¤¡¤<br />
¥ ¦ §¡§ ¨¡¨ © � ��<br />
¡<br />
(a) Erstellen Sie je eine Freischnittskizze <strong>der</strong> beiden Massen m1 und m2 in einer ausgelenkten Lage!<br />
(b) Bestimmen Sie die Normalkräfte zwischen <strong>der</strong> Platte und den Rollen in <strong>der</strong> ausgelenkten Lage als Funktion<br />
von x1! (statisches Problem)<br />
(c) Bestimmen Sie die Bewegungsdifferentialgleichungen des Systems in den Koordinaten x1 und x2! Sortieren<br />
Sie die Gleichungen nach Ableitungen von x1 und x2 o<strong>der</strong> schreiben Sie das System in Matrizenschreibweise!<br />
Geg.: m1, m2, JS, c, µ, g, L<br />
PSfrag replacements<br />
50. Eine dünne homogene Stange gleitet reibungsfrei mit ihren Endpunkten A, B auf<br />
zwei zueinan<strong>der</strong> senkrecht stehenden Wänden. Bei α0 = π<br />
war sie in Ruhe.<br />
2<br />
(a) Ermittle den Impuls P und den auf den Schwerpunkt bezogenen Drall LS <strong>der</strong> Stange als Funktion von α.<br />
(b) Wie groß ist<br />
����������������������� ����������������������� ����������������������� ����������������������� �����������������������<br />
l<br />
S<br />
g<br />
<strong>der</strong> auf den Koordinatenursprung O bezogene Drall LO ? O<br />
α B �����������������������<br />
Geg.: m, g, l<br />
51. Das Massenträgheitsmoment ΘA des abgebildeten Schwungrades soll bestimmt<br />
werden. Dazu wird das Rad mit einem dünnen Faden umwickelt. Am Ende des<br />
Fadens wird ein Körper mit <strong>der</strong> Masse m1 befestigt. Nun wird die Dauer t1 gemessen,<br />
in <strong>der</strong> <strong>der</strong> Körper aus <strong>der</strong> Ruhelage um die Höhe h absinkt.<br />
Um den Einfluß des im Lager A wirkenden Reibmomentes zu eliminieren, wird<br />
<strong>der</strong> Versuch mit einem an<strong>der</strong>en Körper mit <strong>der</strong> Masse m2 wie<strong>der</strong>holt. PSfragBei replacements gleicher<br />
Absinkhöhe wird diesmal die Absinkdauer t2 gemessen.<br />
Bestimme ΘA unter den Annahmen, daß das Reibmoment MR konstant ist und<br />
daß die Masse des Fadens vernachlässigt werden kann.<br />
A<br />
e y<br />
µ<br />
e x<br />
����������������������� ����������������������� �����������������������<br />
����������������������� ����������������������� ����������������������� �����������������������<br />
�����������������������<br />
����������������������� �����������������������<br />
����������������������� ����������������������� ����������������������� ����������������������� �����������������������<br />
�����������������������<br />
A<br />
r<br />
m1, m2<br />
h
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 14<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
52. Ein starrer Körper führt Schwingungen in einer vertikalen<br />
Ebene unter dem Einfluß <strong>der</strong> Schwerkraft aus.<br />
Der Zapfen (Radius R) rollt ohne zu gleiten auf <strong>der</strong><br />
starren Unterlage. Verluste durch Reibung seien vernachlässigbar.<br />
Der Massenmittelpunkt C hat den Abstand<br />
a vom Zapfenmittelpunkt M. Der PSfrag Körper replacements hat die<br />
Masse m und das Massenträgheitsmoment J um den<br />
Massenmittelpunkt.<br />
(a) Zeigen Sie, daß die Bewegung durch die Differentialgleichung<br />
beschrieben wird.<br />
¨ϕ � J + m � a 2 + R 2� − 2maR cos ϕ � + mga sin ϕ + maR ˙ϕ 2 sin ϕ = 0<br />
(b) Bestimmen Sie nun ausgehend von <strong>der</strong> hergeleiteten Bewegungsdifferentialgleichung die statische Ruhelage.<br />
(c) Wie lautet die Bewegungsdifferentialgleichung, wenn man kleine Schwingungen um die Ruhelage ϕ = 0<br />
betrachtet?<br />
(d) Mit welcher Kreisfrequenz ω schwingt das System bei kleinen Auslenkungen?<br />
53. Ein Klotz (Gewichtskraft FG) wird durch eine unter<br />
dem Winkel ϕ angreifende Kraft F gleichförmig<br />
eine schiefe Ebene hinaufgezogen (Reibzahl µG).<br />
Am Klotz ist eine Walze <strong>der</strong> Gewichtskraft PSfrag replacements FW<br />
über einen Stab <strong>der</strong> Länge l angeschlossen.<br />
(a) Wie groß ist F <strong>für</strong> den Spezialfall ϕ = 40 ◦ ,<br />
FG = 100N, FW = 180N, l = 0.1m, r =<br />
0.035m, b = 0.035m, µG = 0.12 und α = 30 ◦<br />
?<br />
(b) Für welchen Winkel ϕ tritt <strong>für</strong> diesen Spezialfall<br />
(außer, dass ϕ nun nicht gegeben sein<br />
soll) Selbsthemmung auf?<br />
Hinweis: Es soll idealisierend angenommen werden,<br />
dass keine Kippmomente wirken.<br />
54. Für den um die z-Achse rotationssymmetrischen Körper mit <strong>der</strong> konstanten<br />
Dichte ρ, dessen Kontur durch die Gleichung z = r2<br />
gegeben ist, berechne<br />
a<br />
man:<br />
PSfrag replacements<br />
(a) den Ortsvektor xC zum Massenmittelpunkt,<br />
(b) das Massenträgheitsmoment um die z-Achse Θ C zz bzgl. des Schwerpunktes.<br />
Geg.: h, a, ρ<br />
55. Das skizzierte physikalische Pendel besteht aus einem dünnen Stab <strong>der</strong> Länge l mit <strong>der</strong><br />
Masse m und einer punktförmigen Endmasse M.<br />
(a) Bestimme das Massenträgheitsmoment bezüglich <strong>der</strong> Achse, die orthogonal zur Zeichenebene<br />
durch den Aufhängepunkt A geht.<br />
(b) Bestimme die Koordinaten des Schwerpunktes.<br />
Geg.: l, m, M = 4m<br />
r<br />
FW<br />
M<br />
α<br />
ϕ<br />
l<br />
y<br />
x<br />
C<br />
PSfrag replacements<br />
z<br />
FG<br />
C<br />
l<br />
¡ ¡ ¡ ¢¡¢¡¢<br />
¢¡¢¡¢ ¡ ¡ ¡<br />
ϕ<br />
A<br />
µG<br />
h<br />
m<br />
r<br />
M<br />
b/2<br />
g<br />
F
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 15<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
56. Betrachtet werden zwei Systeme I und II. System<br />
I ist eine homogene, dünne Scheibe <strong>der</strong><br />
Masse m. System II besteht aus vier Punkt-<br />
PSfrag replacements<br />
massen, die durch starre, masselose Stäbe verbunden<br />
sind. Zeigen Sie, daß die Systeme<br />
I und II die gleichen Trägheitseigenschaften b<br />
besitzen. Anmerkung: Im Englischen spricht<br />
man in diesem Zusammenhang von equimomental<br />
systems.<br />
57. Ein biegestarrer Rotor mit <strong>der</strong> Masse m und dem Trägheitstensor<br />
⎡<br />
Θ (P ) = ⎣<br />
System I System II<br />
a<br />
Jξ −Jξη −Jξζ<br />
−Jξη Jη −Jηζ<br />
−Jξζ −Jηζ Jζ<br />
sitzt auf einer masselosen Welle. Das ξηζ-Koordinatensystem ist förperfest. Der Ursprung des Koordinatensystems<br />
liegt auf <strong>der</strong> Drehachse im Punkt P. Die ζ-Achse weist in Richtung <strong>der</strong> Drehachse. Die Lage des<br />
Rotorschwerpunktes S ist im körperfesten Koordinatensystem durch ξS �= 0, ηS �= 0 und ζS = 0 gegeben.<br />
Die Welle ist über ein Loslager in A und ein Festlager in B drehbar gelagert und wird durch ein konstantes<br />
Drehmoment M0 angetrieben.<br />
PSfrag replacements<br />
ξ<br />
A B<br />
P<br />
a b<br />
(a) Zeigen Sie, daß <strong>der</strong> Schwerpunktsatz die Form<br />
und <strong>der</strong> Drallsatz die Form<br />
Geg.: b, c, m, M0<br />
ζ<br />
−m ˙ωηS − mω 2 ξS = Aξ + Bξ<br />
m ˙ωξS − mω 2 ηS = Aη + Bη<br />
0 = Bζ<br />
ω 2 Jηζ − ˙ωJξζ = Aηa − Bηb<br />
−ω 2 Jξζ − ˙ωJηζ = −Aξa + Bξb<br />
⎤<br />
⎦<br />
1<br />
3 b<br />
1<br />
12 m<br />
M0<br />
1<br />
3 a<br />
1<br />
12 m<br />
˙ωJζ = M0<br />
PSfrag replacements<br />
annehmen. Alle Lagerkräfte sind positiv in positive Koordinatenrichtung angenommen. ξ<br />
(b) Bestimmen Sie nun die Lagerkräfte.<br />
ζ<br />
(c) Wie groß sind die Lagerkräfte, wenn <strong>der</strong> Rotor statisch und dynamisch ausgewuchtet P ist?<br />
A<br />
58. Eine dünne, homogene Dreiecksscheibe <strong>der</strong> Masse m ist in A und B drehbar gelagert. B<br />
Sie wird durch ein Moment M0 angetrieben.<br />
a<br />
bB<br />
Wie groß sind die Lagerreaktionen in A und B und wie groß ist die WinkelbeschleuniM0<br />
gung?<br />
A<br />
b<br />
M0<br />
1<br />
12 m<br />
c<br />
3<br />
4 m
ξ<br />
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
Kinematik und Kinetik<br />
ζ<br />
P<br />
A<br />
B<br />
Seite 16<br />
Version 24. Juni 2004<br />
59. Eine dünne, homogene Rechteckscheibe <strong>der</strong> Masse m ist in A und B dreh- a<br />
M0<br />
bar gelagert; A ist ein Loslager, B ein Festlager. Die Scheibe wird durch b<br />
ein Moment M0 angetrieben. Zudem sind in <strong>der</strong> gleichen Ebene zwei masM0<br />
selose Stangen an <strong>der</strong> Scheibe befestigt.<br />
B<br />
c<br />
(a) Wie groß ist die Winkelbeschleunigung <strong>der</strong> Rechteckscheibe?<br />
(b) Wie groß sind die Lagerreaktionen in A und B?<br />
(c) Ist es möglich, PSfrag replacements<br />
den Rotor durch Anbringen von Punktmassen auf<br />
den masselosen Stangen auszuwuchten? ξ<br />
Wenn ja, in welchem Abstand<br />
von <strong>der</strong> Drehachse müssen ζ welche Punktmassen angebracht<br />
A<br />
werden?<br />
P<br />
Geg.: b, c, m, M0<br />
A<br />
B<br />
60. Ein homogener Körper <strong>der</strong> Mas- a<br />
se m ist auf einer masselosen b<br />
M0<br />
Welle befestigt und in A und B<br />
4a<br />
A 2a<br />
4a<br />
g<br />
Schnitt A-A<br />
gelagert. Er wird durch ein Antriebsmoment<br />
MAN im Schwerefeld<br />
<strong>der</strong> Erde aus <strong>der</strong> Ruhe her-<br />
a<br />
aus beschleunigt. ξ S MAN , ω, ˙ω S 4a<br />
a<br />
ζ ζ<br />
ξ<br />
A<br />
2a<br />
a<br />
A<br />
η η<br />
(a) Zeigen Sie, dass sich <strong>für</strong> den auf den Schwerpunkt S bezogenen Massenträgheitstensor des Körpers im<br />
angegebenen ξ − η − ζ−Koordinatensystems<br />
Θ (s) = ma2<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
⎛<br />
⎞<br />
25 0 0<br />
B<br />
⎝ 0 6 6 ⎠<br />
a<br />
12<br />
0 6 21<br />
b<br />
ergibt.<br />
M0<br />
(b) Bestimmen Sie die Lagerkräfte in A und B während des Beschleunigungsvorganges in Abhängigkeit von<br />
ω und ˙ω.<br />
(c) Wie groß ist ˙ω?<br />
Geg.: g, m, a, MAN<br />
61. Der skizzierte Rotor, <strong>der</strong> sich im<br />
Schwerefeld <strong>der</strong> Erde befindet, besteht<br />
aus den masselosen Stangen 1○,<br />
2○, und 3○ sowie <strong>der</strong> massenbehafteten,<br />
homogenen, rechteckigen Scheibe<br />
4○ (Masse m). Er ist in B gegenüber<br />
<strong>der</strong> Umgebung gelagert und<br />
dreht sich mit <strong>der</strong> konstanten Winkelgeschwindigkeit<br />
ω um die masselose<br />
Achse AB. Das eingezeichnete ξ −η −<br />
ζ−Koordinatensystem ist körperfest,<br />
d.h. es dreht sich mit dem Rotor.<br />
Die Punktmassen m1 und m2 sind<br />
zunächst nicht montiert und müssen<br />
nur in Aufgabenteil b) berücksichtigt<br />
werden.<br />
(a) Bestimmen Sie sämtliche Auflagerreaktionen in B!<br />
Hinweis: B ist ein fünfwertiges Lager!<br />
Seitenansicht: Draufsicht:<br />
g<br />
2l<br />
l<br />
l<br />
4<br />
3<br />
ζ<br />
A<br />
(b) Wie groß müssen m1 und m2 sein, und an welcher Stelle ξ2 muß die Masse m2 auf <strong>der</strong> Stange 2○ montiert<br />
werden, damit <strong>der</strong> Rotor bezüglich <strong>der</strong> ζ−Achse statisch und dynamisch ausgewuchtet ist?<br />
Hinweis: Die Stelle ξ1, an <strong>der</strong> die Masse m1 beim Auswuchten montiert werden muß, ist gegeben!<br />
Geg.: l, m, g, α = 45 o , ω = � g<br />
, ξ1 = l.<br />
l<br />
B<br />
2<br />
α<br />
ω<br />
m1<br />
m2<br />
ξ<br />
B<br />
2l<br />
2l<br />
3<br />
4<br />
b<br />
(m)<br />
ω<br />
2<br />
1<br />
η<br />
α<br />
α<br />
m2<br />
m1<br />
ξ2<br />
a<br />
ξ1<br />
ξ
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
Kinematik und Kinetik<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
Seite 17<br />
Version 24. Juni 2004<br />
dyn-ie<br />
a<br />
b<br />
62. Zwei Personen mit den Massen m1 und m2 laufen auf einer Scheibe mit MasM0<br />
senträgheitsmoment ΘS längs zweier konzentrischer Kreise mit den Bahngeschwindigkeiten<br />
v1 und v2. Die Scheibe ist dabei in Ruhe.<br />
Mit welcher Winkelgeschwindigkeit rotiert die reibungsfrei und zentrisch gelagerte<br />
Scheibe, wenn beide Personen plötzlich stehenbleiben?<br />
Geg.: m1, m2, ΘS, r1, r2, v1, v2<br />
ΘS<br />
m2<br />
r2<br />
S<br />
r1<br />
m1<br />
v2<br />
v1<br />
63. Eine Kugel fliegt mit einer Geschwindigkeit v0. Zum Zeitpunkt t = t0<br />
zerplatzt sie in drei Teile. Alle Geschwindigkeitsvektoren liegen in<br />
einer Ebene, <strong>der</strong>en Draufsicht anbei skizziert ist.<br />
Geg.: m0, α = π π<br />
, β = 6 2 , v0, v1 = 2√3v0, v2 = 4<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
√ √<br />
8<br />
3v0, v3 = 3v0<br />
3<br />
3<br />
v3<br />
m3<br />
y<br />
x<br />
v0<br />
m0<br />
(a) Bestimmen Sie die Massen <strong>der</strong> drei Teile.<br />
(b) Wieviel mechanische Energie hat das gesamte System beim<br />
Zerplatzen insgesamt aufgenommen, wenn m0 = 6 g (sechs<br />
Gramm) und v0 = 10 m<br />
s ?<br />
64. Eine Kugel (m2) stößt mit <strong>der</strong> Geschwindigkeit v0 gegen einen frei beweglichen<br />
ruhenden Klotz (m1, JS). Nach dem Stoß ist die Geschwindigkeit<br />
<strong>der</strong> Kugel null.<br />
(a) Wie groß sind die Winkelgeschwindigkeit ω des Klotzes und die<br />
Geschwindigkeit seines Schwerpunkts vs,1 nach dem Stoß? (Der<br />
Stoß kann nicht als ideal elastisch angenommen werden.)<br />
(b) Berechnen Sie nun <strong>für</strong> den Fall eines ideal elastischen Stoßes und<br />
JS = 1<br />
2 m1a2 PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
a<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
zusätzlich das Verhältnis <strong>der</strong> Massen m1/m2!<br />
Geg.: m1, m2, JS, a, v0<br />
65. Eine Masse m1 trifft mit einem elastischen Stoß auf ein Pendel (m2, Θ A PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
2 , SchwerM0<br />
punkt S).<br />
(a) Bestimme die Winkelgeschwindigkeit des Pendels nach dem Stoß. (zusätzlich<br />
gegeben: a)<br />
(b) Bestimme die Länge a so, daß im Lager A keine Kräfte infolge des Stoßes<br />
auftreten.<br />
Geg.: m1, v1, m2, Θ A PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
2 , s<br />
A<br />
B<br />
66. Eine sich mit v1 bewegende Kugel trifft auf eine sich mit v2 bewegende Un-<br />
a<br />
terlage.<br />
b<br />
M0<br />
Ermittle die Winkelgeschwindigkeit Ω1 <strong>der</strong> Kugel nach dem elastischen Stoß.<br />
Geg.: m1, m2, v1 = −v1e n , v2 = v2e t<br />
m1<br />
v1<br />
β<br />
α<br />
α<br />
m1<br />
m2<br />
m2<br />
v0<br />
m1, JS<br />
A<br />
S<br />
v1<br />
r<br />
m1<br />
¡ ¢<br />
¢<br />
¡<br />
en et v2<br />
m2<br />
v1<br />
m2, Θ A 2<br />
s<br />
v2<br />
a
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
ζ<br />
P<br />
Seite 18<br />
Kinematik und Kinetik A<br />
B<br />
a<br />
Version 24. Juni 2004<br />
b<br />
67. Eine Kugel <strong>der</strong> Masse m und des Radius r trifft mit <strong>der</strong> GeschwindigkeitM0<br />
v unter einem Winkel α auf eine starre Platte.<br />
Bestimme die Geschwindigkeiten ˆv und ω sowie den Winkel β nach dem<br />
m<br />
r<br />
ω<br />
ˆv<br />
Stoß unter den folgenden vereinfachenden Annahmen:<br />
v α β<br />
(a) Der Stoß sei ideal elastisch (ohne Energieverlust).<br />
(b) Die Geschwindigkeitskomponente senkrecht zur Wand sei nach<br />
dem Stoß umgekehrt gleich <strong>der</strong> vor dem Stoß (elastischer Stoß<br />
in Normalenrichtung). Der Berührpunkt auf <strong>der</strong> Kugel habe nach<br />
dem Stoß eine Geschwindigkeitskomponente tangential zur Wand,<br />
die genau gleich <strong>der</strong> <strong>der</strong> Wand, also Null ist (plastischer Stoß in<br />
tangentialer Richtung).<br />
(c) Die Kugel gleitet an <strong>der</strong> Wand ohne Reibung.<br />
Geg.: m, r, v, α<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡<br />
68. Eine Kugel <strong>der</strong> Masse m2 stößt mittig gegen einen ruhenden homogenen Würfel mit <strong>der</strong> Dichte ρ, <strong>der</strong> an einem<br />
als masselos anzusehenden Stab befestigt ist. PSfrag replacements<br />
ξ<br />
(a) Berechnen Sie die Winkelgeschwindigkeit des Würfels unmit-<br />
ζ<br />
telbar nach dem Aufprall. Der Stoß sei ideal elastisch, JS und<br />
m1 als bekannt anzunehmen.<br />
P<br />
A<br />
Geg.: l, v0, JS, m1, m2<br />
B<br />
(b) Leiten Sie das Massenträgheitsmoment JS des Würfels um a<br />
seinen Schwerpunkt aus <strong>der</strong> allgemeinen Formel <strong>für</strong> das Mas- b<br />
senträgheitsmoment eines beliebig geformten starren Körpers PSfrag M0replacements<br />
ab.<br />
ξ<br />
Geg.: ρ, l<br />
ζ<br />
P<br />
69. Zwei Kugeln treffen wie skizziert aufeinan<strong>der</strong>. Der Stoß sei ideal elastisch, die<br />
A<br />
Oberflächen <strong>der</strong> Kugeln haften dabei ( rauhe“ Kugeln). Vor dem Stoß ist die<br />
” B<br />
Masse m1 in Ruhe und m2 bewegt sich mit <strong>der</strong> Geschwindigkeit v2, beide Kugeln<br />
a<br />
drehen sich nicht.<br />
b<br />
Berechnen Sie Geschwindigkeiten und Drehgeschwindigkeiten <strong>der</strong> Kugeln nachM0<br />
dem Stoß.<br />
r2<br />
m2 α<br />
v2<br />
Geg.: m1, m2, v2, α = π<br />
6<br />
, r1, r2<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
70. Eine Masse m, die von einem Faden gehalten<br />
wird, bewegt sich mit <strong>der</strong> Winkelgeschwindigkeit<br />
ω0 auf einer glatten Ebene mit dem Ab-<br />
stand r0 von einem Loch A. Die Masse hängt<br />
an einem Faden, <strong>der</strong> durch das Loch geführt ist<br />
und mit <strong>der</strong> Kraft S0 gehalten wird.<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
(a) Wie groß ist die Winkelgeschwindigkeit ω1, wenn <strong>der</strong> Faden so weit angezogen wird, dass sich die Masse<br />
anschließend im Abstand r1 bewegt? PSfrag replacements<br />
(b) Wie än<strong>der</strong>t sich hierbei die Fadenkraft?<br />
ξ<br />
ζ<br />
71. Eine homogene gleichseitige Dreiecksscheibe <strong>der</strong> Dicke t stößt<br />
P<br />
mit <strong>der</strong> Spitze gegen eine ruhende Kugel.<br />
A<br />
B<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
aHinweis:<br />
yo(x) =<br />
b<br />
M0<br />
P<br />
A<br />
B<br />
a<br />
b<br />
√ 3<br />
3 x<br />
y<br />
√<br />
3<br />
2<br />
x l<br />
yo(x)<br />
M0<br />
ω0<br />
A<br />
r0<br />
m<br />
l<br />
2<br />
S0<br />
m1<br />
r0<br />
r1
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 19<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
(a) Bestimmen Sie das Massenträgheitsmoment PSfrag replacements <strong>der</strong> Scheibe um ihr Lager A!<br />
(b) Berechnen Sie die Geschwindigkeit <strong>der</strong> Kugel unmittelbar ξ nach dem Stoß!<br />
ζ<br />
Geg.: l, t, ρ, m, ω0, v0 = 0<br />
P<br />
A<br />
72. Eine Kugel <strong>der</strong> Masse m1 rollt aus <strong>der</strong> Höhe H herab gegen<br />
B<br />
einen Kasten (Leermasse m2) und bleibt darin<br />
stecken. Durch den Aufprall rutscht <strong>der</strong> Kasten eine schiefe<br />
a<br />
Ebene hinauf. Zu Beginn waren Kugel und Kasten<br />
in Ruhe.<br />
b<br />
(a) Berechnen Sie mit dem Energieerhaltungssatz dieM0<br />
m1, JS<br />
Geschwindigkeit <strong>der</strong> Kugel beim Auftreffen auf<br />
reines Rollen g<br />
den Kasten!<br />
(b) Bestimmen Sie die Geschwindigkeit des Kastens<br />
mit <strong>der</strong> darin steckenden Kugel unmittelbar nach<br />
dem Aufprall (Vernachlässigen Sie das von <strong>der</strong><br />
Kugel auf den Kasten übertragene Moment)!<br />
(c) Berechnen Sie mit dem Arbeitssatz welche Strecke<br />
L <strong>der</strong> Kasten bis zum Stillstand zurücklegt!<br />
Geg.: m1, JS = 2<br />
5 m1r2 , r, m2, H, α, µ, g,<br />
73. Eine dünne homogene Scheibe (Radius r, Masse m) ist im Punkt P frei drehbar<br />
durch ein Kugelgelenk gelagert. Im Punkt Q stößt etwas senkrecht zur Scheibe (in<br />
y-Richtung) dagegen. Um welche Achse dreht sich die Scheibe unmittelbar nach<br />
dem Aufprall? Bearbeite dazu zunächst die folgenden Teilaufgaben!<br />
M0<br />
(a) Berechne den Drehimpuls(-vektor) bezüglich P einer Punktmasse, die senkrecht<br />
zur Scheibenebene im Punkt Q gegen die Scheibe stößt vor und nach<br />
r<br />
m<br />
dem Aufprall (Masse und Geschwindigkeiten seien gegeben).<br />
(b) Berechne den Massenträgheitsmomententensor <strong>der</strong> Scheibe bezüglich P.<br />
z<br />
(c) Die Drehung <strong>der</strong> Scheibe um eine beliebige durch P gehende Achse wird<br />
durch den Vektor <strong>der</strong> Winkelgeschwindigkeit ω charakterisiert. Berechne den<br />
Drehimpuls(-vektor) <strong>der</strong> Scheibe bezüglich P bei vorgegebenem ω.<br />
Geg.: r, m<br />
74. Ein System, bestehend aus einem Balken und zwei Rollen<br />
an den Balkenenden, führt eine ebene Bewegung aus. Bekannt<br />
ist die waagerechte Geschwindigkeitskomponente vsx<br />
des Balkenmittelpunktes und <strong>der</strong> Stellungswinkel β.<br />
Bestimme die kinetische und potentielle Energie des Systems!<br />
Geg.: l, r1, r3, m1, J1 = m<br />
2 r2 1, m2, J2 = 2<br />
3 ml2 , m3, J3 =<br />
m<br />
2 r2 PSfrag replacements<br />
ξ<br />
3, vsx, β<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
r<br />
H<br />
PSfrag replacements µ<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
m2<br />
¢ £ ¤ ¥ ¦ § ¨ ©¡© � �¡� �¡� ¡<br />
75. Berechnen Sie an <strong>der</strong> Atwoodschen Fallmaschine vermittels des Energiesatzes die Geschwindigkeit<br />
<strong>der</strong> zwei Massen in Abhängigkeit <strong>der</strong> Auslenkung.<br />
PSfrag replacements<br />
Das Seil sei hierbei als masselos und dehnstarr anzusehen, die Scheibe als trägheitslos.<br />
ξ<br />
ζ<br />
Gegeben: g, M, m.<br />
P<br />
A<br />
B<br />
a<br />
b<br />
76. Ein Körper <strong>der</strong> Masse m wird normal zum Schwerefeld <strong>der</strong> Erde um die Strecke dx bewegt.<br />
Zeigen Sie, daß ausgehend vom Newtonschen Gesetz F = ma <strong>für</strong> die kinetische Energie<br />
M0<br />
T = 1<br />
2 mv2<br />
y<br />
M0<br />
L<br />
P<br />
M<br />
α<br />
x<br />
Q<br />
M + m
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
A<br />
B<br />
Seite 20<br />
Kinematik a und Kinetik<br />
b<br />
Version 24. Juni 2004<br />
folgt, wenn <strong>für</strong> die Arbeit dW = F dx gilt.<br />
77. Eine Punktmasse m wird am Punkt A durch<br />
eine um ∆s gespannte Fe<strong>der</strong> abgeschossen.<br />
Die Punktmasse läuft reibungsfrei von A<br />
über B nach C. Ab dem Punkt C herrscht<br />
Gleitreibung.<br />
(a) Wie groß ist die Geschwindigkeit <strong>der</strong><br />
Punktmasse im Punkt B und C?<br />
(b) Wie lang ist <strong>der</strong> Bremsweg L?<br />
Geg.: a, β = 30 ◦ , c, g, H, m, µg = 0.6, ∆s.<br />
78. Zwei Massen sind über eine Rolle miteinan<strong>der</strong> verbunden.<br />
M0<br />
H<br />
c<br />
PSfrag replacements △s<br />
A<br />
m<br />
ξ<br />
ζ<br />
P<br />
A<br />
µ = 0<br />
B<br />
a<br />
b<br />
(a) Wie groß darf <strong>der</strong> Haftreibbeiwert µ0 höchstens sein, damit sich die<br />
Masse m2 nach unten in Bewegung setzt?<br />
(b) Berechne unter Verwendung des Arbeitssatzes die Beschleunigung ¨x 2<br />
<strong>der</strong> Masse m2.<br />
(c) Nachdem die Masse m2 am Boden auftrifft, bewegt sich die Masse m1<br />
weiter und kommt an ihrem höchsten Punkt zum Stillstand. Welchen<br />
Weg L legt sie dabei zurück? Hinweis: Lösung über Arbeitssatz<br />
Geg.: m1, m2, Θ, r1, r2, µ0, Gleitreibbeiwert µ, g, h, α<br />
79. Im nebenstehend skizzierten System tritt kein Schlupf auf, die<br />
Reibung wird vernachlässigt.<br />
(a) Das Antriebsmoment sei M1 := −Ma. Bestimme mit dem<br />
Arbeitssatz die Geschwindigkeit ˙z(z) <strong>der</strong> Masse m an je<strong>der</strong><br />
beliebigen Stelle z!<br />
(b) Bestimme das Antriebsmoment Mb = −M1, bei dem die<br />
Masse m maximal die Höhe zb erreicht!<br />
Geg.: J S PSfrag replacements<br />
ξ<br />
ζ<br />
, m, r, c, Ma, zb, g, z(0) = ˙z(0) = ϕ1(0) = ϕ2(0) = P<br />
ϕ3(0) = 0<br />
A<br />
PSfragB replacements<br />
a<br />
ξ<br />
b<br />
ζ<br />
M0<br />
P<br />
80. Jemand möchte mit seinem Skateboard durch ein Looping fahren. PSfrag replacements A<br />
B ξ<br />
Man bestimme die Mindesthöhe h, bei <strong>der</strong> <strong>der</strong> Skateboar<strong>der</strong> aus <strong>der</strong> Ruhe<br />
a ζ<br />
starten kann, damit er das Looping vollständig durchläuft.<br />
b P<br />
M0<br />
Der Skateboar<strong>der</strong> wird als Punktmasse <strong>der</strong> Masse m angenommen. Dissipa- hA<br />
tion (Energieverlust) tritt nicht auf.<br />
B<br />
a<br />
Geg.: g, m, R.<br />
b<br />
81. Auf einer rauhen schiefen Ebene mit dem Winkel α befindet sich eine Punktmasse<br />
m im Erdschwerefeld. An ihr wirkt wie dargestellt eine Kraft F0, und zusätzlich<br />
wird sie von einem Wind mit v0 = konst. angeblasen.<br />
(a) Stelle mit Hilfe des Arbeitssatzes die Bewegungsgleichung auf.<br />
(b) Berechne die Kraft F0 die nötig ist, damit sich die Masse m mit <strong>der</strong> konstanten<br />
Geschwindigkeit ˙x = v0 bewegt.<br />
Geg.: α, µ, m, g, k, v0<br />
M0<br />
B<br />
M0<br />
g<br />
C<br />
β<br />
L<br />
µg<br />
a<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
m1¡<br />
¡ ¡<br />
¡ ¡ ¡ ¡ ¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
µ, µ0<br />
m2<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
α<br />
y<br />
r2<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
Θ<br />
D<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ r1<br />
¡<br />
g<br />
x<br />
α<br />
g<br />
F0<br />
µ<br />
R<br />
v0<br />
h<br />
g
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
b<br />
M0<br />
Seite 21<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
82. Eine zylin<strong>der</strong>förmige Walze (m2) schiebt einen Klotz (m1, Gleitreibkoeff.<br />
µ) auf einer schiefen Ebene vor sich her. Die Walze und <strong>der</strong><br />
Klotz treffen auf eine Fe<strong>der</strong> und drücken diese bis zum Maximalbetrag<br />
f zusammen. Die schiefe Ebene besteht aus zwei unterschiedlichen<br />
Materialien mit den Gleitreibkoeffizienten µ1 und µ2. Auf dem<br />
ersten Material rollt die Walze, auf dem zweiten Material gleitet sie.<br />
Wie groß muß v0 sein, damit die Fe<strong>der</strong> um die Länge f zusammengedrückt<br />
wird?<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¡<br />
Geg.: l1, l2, f, α, µ1, µ2, r, m1, m2, c, ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
g<br />
r<br />
α<br />
m2<br />
m1<br />
A<br />
v0<br />
µ1<br />
B<br />
l1 l2 f<br />
83. Im skizzierten ebenen System soll die Reibung vernachlässigt werden. Das antreibende Moment M0 sei konstant,<br />
die Drehfe<strong>der</strong> bei ϕ(t=0) = 0 entspannt.<br />
(a) Stellen Sie den Arbeitssatz <strong>für</strong> das System auf<br />
zwischen dem Anfangszustand mit ϕ(t=0) =<br />
˙ϕ(t = 0) = 0 und einem beliebigen PSfrag replacements späteren<br />
Zustand, <strong>der</strong> durch den Winkel ϕ(t) charak- ξ<br />
terisiert wird. Diese Gleichung soll außer ϕ(t) ζ<br />
und ˙ϕ(t) keine Unbekannten enthalten. P<br />
(b) Bestimmen Sie daraus die Winkelgeschwindig- A<br />
keit ˙ϕ(t1) in dem Moment t1, in dem das B<br />
Stabende E gerade durch den Koordinatenur- a<br />
sprung geht!<br />
b<br />
M0<br />
(c) Wie groß muß das Moment M0 mindestens<br />
PSfrag replacements<br />
sein, damit das Stabende E den Koordina-<br />
ξ<br />
tenursprung überhaupt erreicht.<br />
ζ<br />
P<br />
Geg.: l, c, g, M0, m, JS<br />
A<br />
B<br />
84. Ein Massepunkt <strong>der</strong> Masse m bewegt sich reibungsfrei auf <strong>der</strong> skizzier- a<br />
ten Unterlage. Auf dem ebenen Teil <strong>der</strong> Bahn ist seine Geschwindigkeit m<br />
b<br />
v0.<br />
(a) Bei welchem Winkel ϕ1 hebt die Masse von <strong>der</strong> Unterlage ab?<br />
(b) Wie hoch müßte die Geschwindigkeit v0 mindestens sein, damit<br />
<strong>der</strong> Massepunkt bereits bei ϕ2 = 0 abhebt?<br />
Gegeben: g, m, r, v0.<br />
85. Die Stange m1 gleitet ohne Reibung an <strong>der</strong> linken Wand ab. Zwischen<br />
<strong>der</strong> Stange und dem Rad m2 wirkt das konstante Reibmoment MR.<br />
Bestimme mit Hilfe des Arbeitssatzes die Geschwindigkeit des Punktes<br />
A zu dem Zeitpunkt, an dem die Stange genau waagerecht ist. Dabei<br />
soll angenommen werden, daß A mit <strong>der</strong> Wand in Kontakt bleibt.<br />
Geg.: r, L, g, m1, J S 1 = 1<br />
12 m1L2 , m2, J S 2 = 1<br />
3 m2r2 , MR = konst.,<br />
Anfangsbedingungen: ϕ(0) = π<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
, ˙ϕ(0) = 0<br />
6 a PSfrag replacements<br />
b<br />
ξ<br />
M0<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
¥¦¥¦¥¦¥¦¥¦¥¦¥<br />
¥¦¥¦¥¦¥¦¥¦¥¦¥ §¦§¦§¦§¦§¦§<br />
§¦§¦§¦§¦§¦§<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨¦¨<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©¦©<br />
86. Ein Klotz mit <strong>der</strong> Masse m gleitet auf <strong>der</strong> dargestellten<br />
Bahn von 0 über A und B nach C und<br />
g<br />
k<br />
zurück bis nach D. Im Punkt 0 habe er die Geschwindigkeit<br />
v0. Der Gleitreibungskoeffizient zwischen<br />
A und B sei µ, überall sonst gleich Null. Der<br />
Luftwi<strong>der</strong>stand soll vernachlässigt werden. Bei C<br />
h0<br />
0<br />
h1 D<br />
b<br />
ist eine Fe<strong>der</strong> (Fe<strong>der</strong>steifigkeit k) befestigt. l ist <strong>der</strong><br />
Abstand bis zum Anschlag bei entspannter Fe<strong>der</strong>.<br />
N.N.<br />
α<br />
µ<br />
β<br />
A B<br />
Verwenden Sie den Arbeits- und/o<strong>der</strong> Energiesatz.<br />
m<br />
M0<br />
v0<br />
M0<br />
v0<br />
g<br />
l<br />
µ2<br />
c<br />
ϕ<br />
r<br />
g<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
C<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�<br />
�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�¦�
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 22<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
(a) Bestimmen Sie die Geschwindigkeiten des Klotzes, wenn er die Punkte A und B das erste Mal passiert.<br />
(b) Bestimmen Sie die maximale Auslenkung <strong>der</strong> PSfrag Fe<strong>der</strong>replacements ∆s.<br />
(c) Bis zu welcher Höhe h1 gleitet <strong>der</strong> Klotz zurück?<br />
ξ<br />
ζ<br />
Geg.: α, β, m, v0, h0, l, b, k, µ, g<br />
P<br />
A<br />
87. Dargestellt ist eine einfache Sortiermaschine, die Güter mit Hilfe<br />
B<br />
einer reibungsbehafteten schiefen Ebene in erste und zweite Wahl<br />
a<br />
aufteilt. Ein Arbeiter legt die Waren je nach Qualität oberhalb bzw.<br />
b<br />
unterhalb einer Markierung auf die Rampe. In welchem Abstand a<br />
M0<br />
zum Ende <strong>der</strong> Rampe muß die Markierung angebracht werden?<br />
PSfrag replacements<br />
Geg.: b, h, α, g, µ, m<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
88. Ein Pendel <strong>der</strong> Länge l und Masse m wird aus <strong>der</strong> Winkellage ϕ0 gegenüber <strong>der</strong> a<br />
Vertikalen losgelassen (1). Bei ϕ = 0 wird das Pendel im Punkt P umgelenkt. b<br />
Bestimme den maximalen Winkel ϕ bis zu dem das Pendel emporsteigt (3), wenn<br />
OP = l/2 gilt!<br />
Geg.: g, l, m, OP = l/2, ϕ0 = 45 ◦ .<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
89. Ein Segelflugschüler möchte seinen Fluglehrer beeindrucken und mit P<br />
<strong>der</strong> höchstzulässigen Geschwindigkeit vne knapp über den Boden glei- A<br />
ten. In welcher Flughöhe H muß er mit dem Manöver beginnen, wenn B<br />
er vorher mit <strong>der</strong> Mindestgeschwindigkeit vmin fliegt?<br />
a<br />
b<br />
(a) Vernachlässige den Luftwi<strong>der</strong>stand.<br />
(b) Berücksichtige (als Abschätzung) eine konstante Wi<strong>der</strong>standskraft<br />
FW auf einem geradlinigen Flugweg unter einem Winkel<br />
α zur Horizontalen.<br />
m = 270kg, vmin = 60km/h, vne = 190km/h, FW = 400N, α = 45 ◦<br />
α<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
90. Ein Motorsegler (Abflugmasse m) habe bei eingeklapptem Trieb- P<br />
Gleitflug ohne Motor<br />
werk ein Gleitverhältnis von ɛ = 1:35, das heißt auf einer Gleit- A<br />
strecke von 35 m verliert er bei konstanter Bahngeschwindigkeit PSfrag replacements B<br />
1 m an Höhe.<br />
a ξ<br />
arctan(E)<br />
b<br />
Welche effektive Leistung Peff muß das Triebwerk erbringen, umM0<br />
den Motorsegler bei einer konstanten Geschwindigkeit v im Horizontalflug<br />
zu halten?<br />
ζ<br />
FlugPmit Motor<br />
A<br />
B<br />
Geg.: m = 400kg, ɛ = 1:35, v = 108km/h<br />
a<br />
91. Berechne unter Verwendung des Arbeitssatzes die Beschleunigung ¨x 2<br />
Masse m2.<br />
b<br />
<strong>der</strong>M0<br />
Geg.: m1, m2, Θ C 2 , d, D, µ<br />
M0<br />
M0<br />
α<br />
l<br />
1<br />
h<br />
a<br />
ϕ0<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡<br />
m1<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£<br />
d<br />
D<br />
2<br />
FW<br />
µ<br />
b<br />
0<br />
P<br />
H<br />
g<br />
g<br />
3<br />
m2, Θ C 2<br />
92. Ein Turmspringer, idealisiert als Massenpunkt <strong>der</strong> Masse m, springt unter einem Winkel α mit <strong>der</strong> Geschwindigkeit<br />
v0 von einem Sprungbrett ab, das sich in <strong>der</strong> Höhe H über <strong>der</strong> Wasseroberfläche des Sprungbeckens<br />
befindet. Während des Fluges wird dem Springer vom Gegenwind eine Kraft W = konst. aufgeprägt.<br />
µ<br />
e 3<br />
α<br />
e 1
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 23<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
(a) Stelle mit Hilfe des Energiesatzes die Bewegungsgleichung <strong>für</strong> den<br />
Massenpunkt auf!<br />
(b) Bestimme die Bahnkurve in <strong>der</strong> Form x = x(t) und y = y(t)!<br />
(c) Berechne die Flugzeit te bis zum Erreichen <strong>der</strong> Wasseroberfläche!<br />
(d) An welcher Stelle xe = x(te) taucht die Masse ins Wasser ein, wenn<br />
α = 0 ◦ PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
PSfrag replacements<br />
b<br />
g<br />
ξ M0<br />
ζ<br />
P<br />
A<br />
war?<br />
B<br />
(e) Wie groß darf die Windkraft W höchstens sein, damit <strong>der</strong> Springer a<br />
H<br />
α<br />
y<br />
m1<br />
W<br />
das Becken gerade noch trifft?<br />
b<br />
M0<br />
x<br />
Geg.: H, α, m, v0, W , Erdbeschleunigung g<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¨¤¨¤¨¤¨¤¨¤¨¤¨¤¨<br />
©¤©¤©¤©¤©¤©¤©<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
¨¤¨¤¨¤¨¤¨¤¨¤¨¤¨<br />
©¤©¤©¤©¤©¤©¤©<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥ ¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦¤¦<br />
§¤§¤§¤§¤§¤§¤§¤§¤§¤§¤§<br />
£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£¤£<br />
¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥¤¥<br />
93. Ein Wagen (m2) schleppt einen Klotz (m1, Gleitreibkoeff. µ) auf einer<br />
schiefen Ebene. Der Wagen selbst bewegt sich reibungsfrei, seine<br />
PSfrag replacements<br />
Anfangsgeschwindigkeit bei A ist v0. Bei B blockieren die Rä<strong>der</strong> des<br />
Wagens, <strong>der</strong> Gleitreibkoeffizient ist dann ebenfalls µ.<br />
ξ<br />
ζ<br />
Wie groß muß v0 sein, damit die Fe<strong>der</strong> um die Länge f zusammenge- P<br />
drückt wird?<br />
A<br />
µ A α<br />
Geg.: l1, l2, µ, α, f, m1, m2, c, Erdbeschleunigung g<br />
B<br />
a<br />
b<br />
94. Ein Wagen mit <strong>der</strong> Masse m hat im Punkt A die GeschwindigkeitM0<br />
B<br />
c<br />
vA<br />
vA und rollt dann verlustfrei durch PSfrag eine Senke. replacements An <strong>der</strong> Stelle C<br />
steht ein Rammbock mit <strong>der</strong> Fe<strong>der</strong>konstanten c.<br />
ξ<br />
c<br />
ζ<br />
(a) Welche Geschwindigkeit hat <strong>der</strong> Wagen im Punkt B?<br />
P<br />
(b) Wie weit hat sich die Fe<strong>der</strong> des Rammbocks im<br />
A<br />
Punkt C<br />
zusammengedrückt, wenn <strong>der</strong> Wagen bei C zum<br />
B<br />
Stillstand<br />
kommt?<br />
a<br />
A<br />
B C<br />
Geg.: m, vA, c, h, Erdbeschleunigung g<br />
b<br />
95. Ein Güterwagen <strong>der</strong> Masse m rollt auf einen elastischen<br />
Prellbock (Fe<strong>der</strong>konstante c) mit <strong>der</strong> Geschwindigkeit<br />
v0 zu. Bei 1 werden die Rä<strong>der</strong> durch Bremsen<br />
blockiert (Gleiten!), bei 2 trifft <strong>der</strong> Wagen auf den<br />
Prellbock, dessen entspannte Fe<strong>der</strong> die Länge a hat.<br />
Um welche Strecke ∆x = a − x0 wird <strong>der</strong> Puffer bis<br />
zum Stillstand des Wagens bei 3 zusammengedrückt?<br />
Gegeben: a, c, m, µ, µ0, v0.<br />
M0<br />
m<br />
v0<br />
µ, µ0<br />
PSfrag replacements<br />
96. Beim Windenstart wird ein Segelflugzeug von ei- ξ<br />
ner Seilwinde an einem langen Stahlseil in die ζ<br />
Luft gezogen. Das Flugzeug wird in einer Höhe P<br />
h mit einer Geschwindigkeit v ausgeklinkt. A<br />
B<br />
Berechne unter Vernachlässigung des Luftwi<strong>der</strong>- a<br />
stands die Energie, die nötig ist, um ein Flugzeug b<br />
<strong>der</strong> Masse m bei Windstille zu starten. M0 PSfrag replacements<br />
ξ<br />
Geg.: H = 300m, m = 350kg, v = 108km/h<br />
ζ<br />
97. Ein Auto fährt auf einer Straße in eine Kurve mit dem Radius R. P<br />
Die Rä<strong>der</strong> sollen mit <strong>der</strong> Straße den Haftreibkoeffizienten µ0 haben. A<br />
Die Masse des Autos sei m, die Erdbeschleunigung g.<br />
B<br />
a<br />
(a) Wie schnell kann das Auto in <strong>der</strong> Kurve fahren, ohne seitlich b<br />
zu rutschen?<br />
M0<br />
Geg.:R = 50m, µ0 =0,5 und g=9,81 m<br />
s 2 .<br />
(b) Das Auto fährt in <strong>der</strong> Kurve mit <strong>der</strong> Geschwindigkeit v0.<br />
Plötzlich taucht ein Hin<strong>der</strong>nis auf, das Auto bremst so, daß<br />
es gerade nicht rutscht. Stelle die Bewegungsdifferentialgleichung<br />
mit den zugehörigen Randbedingungen auf!<br />
Geg.: µ0, R, m, g, v0<br />
m1 m2<br />
v0<br />
v0<br />
l1 l2 f<br />
h<br />
1 2 3<br />
x x0<br />
Hin<strong>der</strong>nis<br />
5a<br />
∆s<br />
R<br />
c<br />
a<br />
v0
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 24<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
98. Der Hokkaido-Express fährt mit v = 400km/h nach Norden. Der Zug<br />
befindet sich auf ψ = 45 ◦ nördlicher Breite. Ein einzelner Wagen wiegt<br />
6 Tonnen.<br />
Welche seitliche Kraft übt dieser Wagen auf die Schienen aus? In welcher<br />
Richtung wirkt das Kippmoment?<br />
Zusätzlich geg.: Erdradius R = 6, 4 · 10 6 Nordpol<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
m.<br />
A<br />
B<br />
a<br />
b<br />
PSfrag replacements<br />
ξ<br />
99. Am Äquator steigt warme Luft auf und an den Polen sinkt sie wie<strong>der</strong> ab. In ζ<br />
<strong>der</strong> Höhe strömt deshalb immer Luft vom Äquator zu den Polen. Dort entsteht P<br />
durch die Corioliskraft <strong>der</strong> sog. Jetstream, ein starker permanent vorhandener A<br />
Höhenwind. In welche Richtung bläst <strong>der</strong> Jetstream auf <strong>der</strong> Nordhalbkugel und B<br />
in welche Richtung auf <strong>der</strong> Südhalbkugel?<br />
a<br />
b<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
100. Ein LKW hat am hinteren Ende seiner Ladefläche eine Kiste ge- A<br />
laden. An einer Kreuzung muß er eine Vollbremsung machen, alle B<br />
vier Rä<strong>der</strong> rutschen. Auch die Kiste beginnt dabei, auf <strong>der</strong> La- a<br />
defläche nach vorn zu rutschen und stößt irgendwann vorne an. b<br />
Die Masse <strong>der</strong> Kiste soll sehr klein sein gegenüber <strong>der</strong> Masse desM0<br />
LKW<br />
M0<br />
M0<br />
Äquator<br />
ω<br />
N<br />
S<br />
ψ<br />
v<br />
Erdrotation<br />
(a) Welche Angaben brauchst Du, um die Beschleunigung des LKW bei <strong>der</strong> Vollbremsung zu bestimmen?<br />
(b) Wie groß ist die Beschleunigung des LKW?<br />
(c) Wie groß ist die durch diese Beschleunigung hervorgerufene Trägheitskraft auf die Kiste im mit dem LKW<br />
mitbewegten Bezugssystem?<br />
(d) Welche Angaben brauchst Du, um die Bewegung <strong>der</strong> Kiste auf <strong>der</strong> Ladefläche zu beschreiben?<br />
(e) Wann schlägt die Kiste vorne an?<br />
101. Eine ringförmige Raumstation dreht sich um sich selbst, um im Ring eine künstliche Schwerkraft<br />
zu erzeugen. Wie lange braucht die Station <strong>für</strong> eine volle Drehung, wenn im Ring die<br />
” normale“ Schwerkraft g=9,81 m<br />
s2 PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
PSfrag replacements<br />
A<br />
B<br />
ξ<br />
wirken soll? Der Durchmesser des Rings betrage D = 1km. a<br />
ζ<br />
b<br />
Wie schnell muß man sich in dem Ring bewegen, um schwerelos zu werden und P in welcheM0<br />
Richtung?<br />
A<br />
B<br />
a<br />
102. Ein Stein klemmt im Profil eines Autoreifens. Um ihn herauszulösen, wäre die<br />
a<br />
Kraft FR erfor<strong>der</strong>lich. Das Auto beschleunigt mit <strong>der</strong> konstanten Beschleuni-<br />
b<br />
gung a. Der Raddurchmesser sei D, die Masse des Steins m. Zu Beginn steht<br />
M0<br />
das Rad auf dem Stein. Wann wird <strong>der</strong> Stein aus dem Rad herausgeschleu<strong>der</strong>t?<br />
Stein ϕ<br />
Geg.: FR, D, a, m, ϕ(0) = 0
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 25<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
103. Ein Passagierflugzeug fliegt eine Linkskurve. Der Betrag <strong>der</strong><br />
Geschwindigkeit des Flugzeugs beträgt v = konst., <strong>der</strong> Kurvenradius<br />
beträgt R. Betrachtet werden soll eine Tasche in<br />
<strong>der</strong> Kabine des Flugzeugs mit <strong>der</strong> Masse m.<br />
PSfrag replacements<br />
(a) Wie groß ist die scheinbare Gewichtskraft“, also die ξ<br />
”<br />
Kraft, die man benötigt, um die Tasche an ihrem Ort ζ<br />
im Flugzeug festzuhalten?<br />
P<br />
A<br />
(b) In welche Richtung lenkt die Corioliskraft die Tasche<br />
B<br />
ab, wenn sie losgelassen wird und nach unten“ fällt?<br />
” a<br />
(c) Das Flugzeug fliegt mit 1000 km/h. Bestimme den b<br />
Querneigungswinkel des Flugzeugs und die scheinbareM0<br />
”<br />
Gewichtskraft“ einer 10 kg schweren Tasche bei einem<br />
Kurvenradius von 10 km und bei einem Kurvenradius<br />
von 3 km.<br />
PSfrag replacements<br />
ξ<br />
104. Ein Fahrrad lehnt in <strong>der</strong> U-Bahn an <strong>der</strong> Fahrerhausrückwand unter einem<br />
ζ<br />
Winkel α zu dieser Wand. Wenn die U-Bahn losfährt, wirkt neben <strong>der</strong><br />
Erdbeschleunigung g auch noch die Anfahrbeschleunigung a <strong>der</strong> U-Bahn<br />
P<br />
als sogenannte Führungskraft. Das Fahrrad hat die Masse m und die Höhe<br />
A<br />
h. Der Schwerpunkt soll in <strong>der</strong> Mitte des Fahrrades angenommen werden.<br />
B<br />
Die Breite des Lenkers beträgt b. Ein Wagen <strong>der</strong> U-Bahn habe die Masse<br />
a<br />
M.<br />
b<br />
Geg.: m, M, h, b, α, g (Hinweis: Nicht alle Angaben werden zur Lösung<br />
<strong>der</strong> Aufgabe benötigt.)<br />
(a) Wie groß ist die Führungskraft in Fahrtrichtung, wenn die Beschleunigung<br />
<strong>der</strong> U-Bahn a = g/10 beträgt?<br />
(b) Wie groß muß <strong>der</strong> Neigungswinkel α des Fahrrades mindestens sein,<br />
PSfrag replacements<br />
damit es bei dieser Beschleunigung nicht umkippt?<br />
ξ<br />
105. Eine Masse m gleitet reibungsfrei in einem liegenden Rohr. Das ζ<br />
Rohr dreht sich mit <strong>der</strong> konstanten Winkelgeschwindigkeit ω um<br />
P<br />
eine senkrecht stehende Achse. An einem als masselos anzusehenden<br />
Seil wird mit einer<br />
PSfrag<br />
Kraft<br />
replacements<br />
A<br />
S an <strong>der</strong> Masse gezogen und zwar in<br />
B<br />
Richtung auf die Drehachse des Rohres. ξ<br />
a<br />
ζ<br />
Geg.: m, ω<br />
b<br />
P<br />
M0<br />
A<br />
(a) Berechne die Seilkraft S, die erfor<strong>der</strong>lich B ist, um die Masse<br />
in einem bestimmten Abstand r von a <strong>der</strong> Rotationsachse zu<br />
halten. (Zusätzl. geg.: r) b<br />
(b) Bestimme die Bewegungsgleichung M0<strong>für</strong><br />
r(t), wenn die Seilkraft<br />
konstant gehalten wird (S = S0). (Zusätzl. geg.: S0, r(0) = r0,<br />
˙r(0) = 0)<br />
M0<br />
ω<br />
S<br />
a<br />
α<br />
m<br />
h<br />
r<br />
Tasche (m)<br />
106. Eine Punktmasse m wird von A aus durch eine mit ∆l vorgespannte Fe<strong>der</strong> in die dargestellte Bahn A-E gestoßen.<br />
Zunächst durchläuft die Masse das gerade, reibungsfreie Stück A-B. Dann durchquert sie die reibungsfreie<br />
Spiralwindung B-C (Radius r, Höhe h). Es folgt eine weitere gerade und reibungsfreie Strecke C-D, bis schließlich<br />
<strong>der</strong> reibungsbehaftete Abschnitt D-E (Reibkoeffizient µ, keine Überhöhung, son<strong>der</strong>n reibungsfreie seitliche<br />
Führung) erreicht wird. Dabei handelt es sich um einen Halbkreis mit dem Radius r.<br />
(a) Wie groß ist die Fe<strong>der</strong>steifigkeit<br />
c <strong>der</strong> Fe<strong>der</strong> in A zu wählen, damit<br />
die Punktmasse in B die Geschwindigkeit<br />
vB = √ F (t)<br />
z<br />
2R<br />
g<br />
m c<br />
B<br />
3πga erreicht?<br />
s<br />
A<br />
h<br />
(b) Wie groß ist dann die Geschwindigkeit<br />
vE <strong>der</strong> Punktmasse in E?<br />
(c) Berechnen Sie den von <strong>der</strong><br />
Koordinate ϕ abhängigen<br />
Überhöhungswinkel α(ϕ) <strong>der</strong><br />
Bahn in <strong>der</strong> Spirale, so dass die<br />
Punktmasse nicht aus <strong>der</strong> Bahn<br />
getragen wird. Die Koordinate ϕ<br />
sei 0 im Punkt B.<br />
Geg.: a, g, h = 3πa, m, r = 2a, ∆l = � π<br />
1<br />
a, µ = 3 4 .<br />
µ<br />
E<br />
D<br />
x<br />
p<br />
p<br />
C<br />
Schnitt durch die Bahn<br />
r<br />
r<br />
m<br />
α(ϕ)<br />
y
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
a<br />
b<br />
M0<br />
Kinematik und Kinetik<br />
Seite 26<br />
Version 24. Juni 2004<br />
107. Eine Punktmasse m bewegt sich von<br />
A aus durch einen Halbkreis A-B mit<br />
dem Radius 2R und anschließend durch<br />
einen Dreiviertelkreis-Looping B-E mit<br />
dem Radius R. Am Ende eines geraden<br />
Übergangstückes E-H gleitet die Punktmasse<br />
schließlich auf einen größeren Klotz <strong>der</strong><br />
Masse M. Im Viertelkreis D-E wirkt <strong>der</strong><br />
Punktmasse die Wi<strong>der</strong>standskraft FW (s)<br />
entgegen, <strong>der</strong> Rest <strong>der</strong> Bahn ist reibungsfrei.<br />
Zwischen <strong>der</strong> Punktmasse und dem Klotz<br />
herrscht Gleitreibung (µ), auf den Klotz<br />
wirkt zudem die Kraft F (t).<br />
F (t)<br />
µ<br />
M<br />
H<br />
g<br />
B<br />
R<br />
C<br />
E<br />
D<br />
FW 2R<br />
(a) Zeigen Sie, dass die Geschwindigkeit vA = √ 3gR betragen muß, damit die Punktmasse im höchsten Punkt<br />
C des Loopings gerade noch nicht herunterfällt.<br />
(b) Wie groß ist die Konstante k im Ausdruck <strong>für</strong> die Wi<strong>der</strong>standskraft FW (s) zu wählen, damit die Punktmasse<br />
im Punkt H gerade die Geschwindigkeit vH = √ gR besitzt? Anmerkung: Die Koordinate s beginnt<br />
bei D. PSfrag replacements<br />
(c) Berechnen Sie mit vH aus (b) ξdie<br />
Geschwindigkeit vM des Klotzes, wenn die Punktmasse auf dem Klotz<br />
zur Ruhe gekommen ist. Die Zeitzählung ζ beginnt, wenn die Punktmasse in H auf den Klotz gleitet.<br />
Geg.: g, m, M = 1<br />
1<br />
m, F (t) = 2 8 m<br />
108. Das dargestellte System besteht<br />
aus einer Punktmasse m, die auf<br />
einem Klotz 1 <strong>der</strong> Masse M1<br />
�P g3 liegt. Zwischen <strong>der</strong> Punktmasse<br />
und Klotz 1 wirkt <strong>der</strong> Gleitreibungskoeffizient<br />
µ, die Unterlage<br />
sei reibungsfrei. Klotz 1 ist<br />
über ein undehnbares massloses<br />
Seil und eine masselose Rolle mit<br />
einem weiteren Klotz 2 <strong>der</strong> Masse<br />
M2 verbunden. Das System wird<br />
zum Zeitpunkt t = 0 aus <strong>der</strong> Ruhe<br />
heraus losgelassen und setzt sich<br />
in Bewegung. Nach <strong>der</strong> Zeit t ∗<br />
M0<br />
schlägt <strong>der</strong> Klotz 2 auf den Boden<br />
auf.<br />
A<br />
R<br />
B<br />
a<br />
b<br />
t, R, FW (s) = 4 km<br />
π 2 s, µ = 1<br />
4 .<br />
µ m<br />
M1<br />
Klotz 1<br />
Punktmasse<br />
reibungsfrei<br />
h<br />
M2<br />
vA<br />
g<br />
m<br />
A<br />
Klotz 2<br />
(a) Bestimmen Sie mit Hilfe des Impulssatzes die Geschwindigkeit v ∗ m <strong>der</strong> Punktmasse und v ∗ M des Klotzes 1<br />
zum Zeitpunkt t ∗ , an dem Klotz 2 auf den Boden aufprallt.<br />
(b) Bestimmen Sie die gemeinsame Endgeschwindigkeit vEnd von Klotz 1 und Punktmasse, nachdem die<br />
Punktmasse relativ zu Klotz 1 wie<strong>der</strong> zum Stehen gekommen ist.<br />
√<br />
2gh).<br />
(Rechnen Sie mit v ∗ m = 2 √ ∗<br />
2gh und v 5<br />
M = 1<br />
2<br />
(c) Zeichnen Sie den Verlauf <strong>der</strong> Impulse von Punktmasse und Klotz 1 in ein Diagramm ein.<br />
Geg.: g, m, M1 = M2 = 2<br />
1<br />
m, µ = 5 5 , t∗ �<br />
= 2 2 h<br />
g
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 27<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
3 Schwingungen<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
109. Ein homogener Stab <strong>der</strong> Masse m ist wie skizziert gelagert. Die<br />
Masse des Verbindungselementes zwischen den Drehfe<strong>der</strong>n sei<br />
vernachlässigbar klein.<br />
(a) Stelle die Bewegungsdifferentialgleichung des Systems auf!<br />
(b) Berechne die Eigenkreisfrequenz ω <strong>für</strong> kleine Auslenkungen!<br />
(c) Gib die Lösung <strong>der</strong> DGL (bei kleinen Auslenkungen) <strong>für</strong><br />
die Anfangsbedingungen ϕ(t = 0) = 0 und ˙ϕ(t = 0) = Ω0PSfrag<br />
replacements<br />
an! PSfrag replacements PSfrag replacements<br />
ξ<br />
PSfrag replacements PSfrag replacements<br />
ξ<br />
ξ<br />
ζ<br />
Geg.: cd, ξ cf , m, a, l, Ω0ξ<br />
ζ<br />
ζ<br />
P<br />
ζ<br />
ζ<br />
P<br />
P<br />
110. Berechne die Eigenkreisfrequenzen <strong>der</strong> folgenden Systeme!<br />
A<br />
P<br />
P<br />
A<br />
A<br />
B<br />
A<br />
A<br />
(a) ¡ (b) ¢ £ ¤¥¤ ¦ §<br />
(c) � �������������������<br />
� ��<br />
�¥��<br />
� �������������������<br />
B<br />
B<br />
B<br />
a<br />
(d)�¥��<br />
��<br />
��<br />
�¥��<br />
�¥��<br />
�<br />
�<br />
m, � ��<br />
�¥� �¥� B<br />
(e)<br />
a<br />
JS<br />
��� ��� a<br />
¨<br />
a<br />
a<br />
b<br />
c b �������������������<br />
�������������������<br />
c1 �������������������<br />
��� ��� ��� ��� ��� ��� ��� b<br />
M0<br />
c1<br />
b<br />
b �������������������<br />
M0<br />
M0c1 ��� c2<br />
�������������������<br />
M0<br />
���<br />
m<br />
���<br />
M0<br />
��� ���<br />
�������������������<br />
a ������������������� �������������������<br />
c2<br />
c3<br />
��<br />
�¥��<br />
��<br />
c2<br />
α ������������������� �������������������<br />
�������������������<br />
m ©¥©<br />
m<br />
��<br />
�������������������<br />
111. Die dargestellte homogene Kreisscheibe rollt ohne Schlupf. Berechne<br />
die Eigenkreisfrequenz des Systems <strong>für</strong> kleine Auslenkungen.<br />
Geg.: c1 = c2 = c, c3 = c<br />
2 , c4 = 3c, m, a, ΘS = 1<br />
2 ma2 PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b c1<br />
M0<br />
m<br />
,<br />
Geg.: a, l, c1, c2, c3, r, m, JS<br />
��� ��� ��� ���<br />
��� ���<br />
��� ���<br />
��� ��� ��� ���<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
c d<br />
2<br />
c d<br />
2<br />
a<br />
r<br />
l<br />
EI<br />
�����������������������<br />
�������������������������<br />
c2<br />
�������������������������<br />
�����������������������<br />
�������������������������<br />
�����������������������<br />
�����������������������<br />
�������������������������<br />
112. Der dargestellte Stab pendelt unter dem Einfluß <strong>der</strong> Schwerkraft.<br />
(a) Stelle die Bewegungsdifferentialgleichung auf!<br />
(b) Für kleine Auslenkungen kann das Problem linearisiert werden. Gib die entsprechende<br />
Differentialgleichung an!<br />
(c) Löse diese Differentialgleichung mit den Anfangsbedingungen<br />
ϕ(t = 0) = ϕ0 und ˙ϕ(t = 0) = 0 !<br />
(d) Wie groß ist die Eigenkreisfrequenz des Systems?<br />
Geg.: g, m, l, JS = 1<br />
12 ml2<br />
��<br />
��� ��� ��<br />
��<br />
��� ��� ��� ���<br />
��� ��� ��� ���<br />
��� ��� ��� ���<br />
���<br />
���<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
PSfrag replacements<br />
ϕ<br />
ξ<br />
ζ<br />
P<br />
m, JS<br />
113. Ermittle <strong>für</strong> das skizzierte System bei kleinen Aus- A<br />
schlägen<br />
B<br />
a<br />
c3<br />
l l<br />
(a) die Bewegungsdifferentialgleichung,<br />
b<br />
M0<br />
(b) die Eigenfrequenz des schwach gedämpften und<br />
a O S<br />
a<br />
des ungedämpften Systems.<br />
a<br />
�������������������������<br />
�����������������������<br />
�������������������������<br />
�����������������������<br />
�����������������������<br />
�������������������������<br />
r<br />
� ��<br />
��<br />
��<br />
�������<br />
��� �<br />
m, JS<br />
l<br />
m<br />
c3<br />
m<br />
l<br />
cf<br />
c4<br />
g<br />
� ����<br />
��<br />
��<br />
�<br />
c1<br />
c2
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
ζ<br />
P<br />
Kinematik und Kinetik A<br />
B<br />
a<br />
Seite 28<br />
Version 24. Juni 2004<br />
114. Das skizzierte System wird durch das Moment M(t) zum b<br />
M0<br />
Schwingen angeregt. Der Strömungswi<strong>der</strong>stand <strong>der</strong> Kugel ist<br />
proportional zur Geschwindigkeit mit dem Wi<strong>der</strong>standskoeffizienten<br />
k. Alle an<strong>der</strong>en Wi<strong>der</strong>stände, die Masse <strong>der</strong> Umlen-<br />
m1, J<br />
krolle sowie <strong>der</strong> hydrostatische Auftrieb <strong>der</strong> Kugel sollen vernachlässigt<br />
werden. Die nicht dehnbaren Seile bleiben immer<br />
gespannt. Die Fe<strong>der</strong> ist bei ˜x = 0 entspannt.<br />
S c<br />
1<br />
M(t)<br />
g<br />
S ˜x<br />
R<br />
k<br />
(a) Berechnen Sie die statische Ruhelage xstat <strong>für</strong> den Fall<br />
M(t) = 0!<br />
(b) Bestimmen Sie die Bewegungsdifferentialgleichung um<br />
die statische Ruhelage (in <strong>der</strong> Variable x = ˜x − xstat).<br />
(c) Bestimmen sie die Amplitude und den Phasenwinkel <strong>der</strong><br />
stationären Schwingung!<br />
Geg.: m1, m2, J S £ ¢ ¡<br />
� ¤¥¤ © § � ¦¥¦ � ¨<br />
PSfrag replacements<br />
reines Rollen<br />
ξ<br />
ζ<br />
P<br />
y<br />
A<br />
B<br />
1 , M(t) = M0 cos Ωt, M0, Ω, g, c, k a<br />
b<br />
115. Ein masseloser Balken (Länge l, Biegesteifigkeit EI) istM0<br />
bei A gelenkig gelagert und bei B in eine Hülse gesteckt,<br />
die dem Balken dort eine horizontale Tangente aufzwingt.<br />
l<br />
glatt, starr<br />
Die Hülse (Masse m) kann auf einer starren Stange in vertikaler<br />
Richtung reibungsfrei gleiten. Der Balken schwingt<br />
A x<br />
B<br />
ausschließlich in Querrichtung.<br />
PSfrag replacements<br />
(a) Wie lautet die Bewegungsdifferentialgleichung <strong>für</strong><br />
die vertikale Bewegung <strong>der</strong> Masse m?<br />
(b) Wie groß ist die Eigenkreisfrequenz ω?<br />
ξ w<br />
ζ<br />
P<br />
A<br />
EI<br />
m<br />
Geg.: EI, l, m<br />
B<br />
a<br />
116. Ein eingespannter, masseloser Stab mit kreisförmigem Quer- b<br />
schnitt trägt an seinem Ende eine Einzelmasse. GeeigneteM0<br />
Anfangsbedingungen lassen den Stab um seine Längsachse PSfrag replacements<br />
schwingen.<br />
ξ<br />
ζ<br />
(a) Stellen Sie die Bewegungsdifferentialgleichung <strong>für</strong> die<br />
y P<br />
Drehbewegung <strong>der</strong> Endmasse auf.<br />
A<br />
z<br />
(b) Bestimmen Sie die Eigenkreisfrequenz ω.<br />
B<br />
x<br />
ϑ<br />
G, Ip, A<br />
a l<br />
Geg.: l, m, G, Ip, A<br />
b<br />
117. Ein gefe<strong>der</strong>ter und gedämpfter einachsiger Anhänger rollt mit konstanter<br />
Geschwindigkeit v durch sinusförmige Bodenwellen mit <strong>der</strong> Wellenlänge<br />
l und <strong>der</strong> Amplitude z0. Untersuche <strong>für</strong> den stationären Zustand<br />
den Einfluß <strong>der</strong> Parameter z0, v, m, c und r auf die Amplitude<br />
A und die Phasenverschiebung α <strong>der</strong> Schwingung und die Achskraft<br />
W !<br />
Geg.: l, z0, v, m, c, r<br />
PSfrag replacements<br />
ξ<br />
118. Ein schwach gedämpftes schwingungsfähiges System wird durch M(t) = ζ<br />
M0 sin λt angeregt. In <strong>der</strong> skizzierten Stellung ist die Fe<strong>der</strong> gerade span-<br />
P<br />
nungsfrei.<br />
A<br />
B<br />
(a) Bestimme die Bewegungsdifferentialgleichung <strong>für</strong> kleine Auslen-<br />
a<br />
kungen ϕ!<br />
b<br />
(b) Gib die allgemeine Lösung <strong>der</strong> Differentialgleichung an und passe<br />
diese folgenden Anfangsbedingungen an:<br />
ϕ(t = 0) = m2g<br />
ca<br />
und ˙ϕ(t = 0) = 0<br />
(c) Wie groß sind Amplitude und Phasenwinkel im eingeschwungenen<br />
Zustand?<br />
Geg.: a, b, c, r, M0, λ, m1, JS, m2<br />
r<br />
M0<br />
z<br />
c<br />
2<br />
m<br />
� ��� ��� ��<br />
��� ��� ����<br />
��� ��� ��<br />
��<br />
���<br />
r<br />
��� ��� ���<br />
����<br />
���<br />
���<br />
��<br />
��<br />
���<br />
c<br />
2<br />
M0 a<br />
c<br />
m1, JS<br />
119. Die partikuläre Lösung einer Schwingungsdifferentialgleichung stellt den eingeschwungenen, stationären Zustand<br />
des zwangserregten Systems dar. Berechne die stationären Lösungen <strong>der</strong> folgenden Schwingungsdifferen-<br />
b<br />
r<br />
ϕ<br />
M(t)<br />
m2<br />
z0<br />
m2<br />
v<br />
l/4<br />
r<br />
x<br />
m
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 29<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
tialgleichungen und stelle sie in <strong>der</strong> Form  cos(ωt + ϕ) dar, wobei  die (reelle) Schwingungsamplitude und ϕ<br />
die Phasenverschiebung darstellt.<br />
(a) ¨y + γ ˙y + ω 2 0y = F cos Ωt<br />
(b) ¨y + γ ˙y + ω 2 0y = F sin Ωt<br />
(c) ¨y + γ ˙y + ω 2 PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
0y = F1 cos Ω1t + F2 sin Ω2t<br />
A<br />
B<br />
120. An einer homogenen Kreisscheibe greift wie skizziert eine harmo- a<br />
x<br />
¡ ¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
nische Erregerkraft S(t) an.<br />
b<br />
S(t)<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ x(t) ¡ beschreibt ¡ die ¡ Auslenkung ¡ aus ¡ <strong>der</strong> ¡ ¡ ¡ statischen ¡ ¡ ¡ Ruhelage. ¡ ¡ ¡<br />
Be¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
M0 m<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
rechne den ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ stationären (eingeschwungenen) Zustand des Systems<br />
(Amplitude ¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ und Phasenlage) bei kleinen Auslenkungen.<br />
k<br />
Geg.: S(t) = S0 cos Ωt, m, c, k, a<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
121. Bei frem<strong>der</strong>regten Schwingern hängt die zu erwartende Amplitude A<br />
<strong>der</strong> Systemantwort bei gegebenen Parametern des Schwingers von B<br />
<strong>der</strong> Erregerfrequenz ab. Diese Abhängigkeit wird häufig über eine a<br />
sogenannte Vergrößerungsfunktion V ausgedrückt, die im folgende- b<br />
nen <strong>für</strong> den abgebildten Einmassenschwinger hergeleitet werden soll. M0<br />
Die Dämpfung sei so gering, daß es tatsächlich zu Schwingungen<br />
kommt.<br />
c<br />
a<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
α<br />
reines Rollen<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
k<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
d m<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤¡¤<br />
£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£¡£<br />
x<br />
ˆF cos Ωt<br />
(a) Zeigen Sie, daß die Schwingungen des abgebildeten Einmassenschwingers durch die Differentialgleichung<br />
m¨x + d ˙x + kx = ˆ F cos Ωt (1)<br />
beschrieben werden.<br />
(b) Leiten Sie die dimensionslose Form<br />
ξ ′′ + 2Dξ ′ + ξ = cos ητ (2)<br />
<strong>der</strong> Differentialgleichung (1) her. Welche Beziehungen gelten zwischen x und ξ sowie zwischen t und τ?<br />
(c) Bestimmen Sie mittels (2) die Vergrößerungsfunktion V , die als Quotient aus Amplitude im eingeschwungenen<br />
Zustand und statischer Absenkung unter <strong>der</strong> Wirkung <strong>der</strong> Kraft ˆ PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
F definiert sein soll.<br />
b<br />
122. Das skizzierte System wird durch das Moment M(t) zum<br />
Schwingen angeregt. Die nicht dehnbaren Seile bleiben immer<br />
gespannt.<br />
(a) Schneiden Sie die Masse m frei! (Skizze)<br />
(b) Bestimmen Sie die Bewegungsdifferentialgleichung in <strong>der</strong><br />
Schwerpunktskoordinate x!<br />
(c) Bestimmen sie die Amplitude und den Phasenwinkel <strong>der</strong><br />
stationären Schwingung!<br />
Geg.: m, JS, M(t) = M0 cos Ωt, M0, Ω, g, c, k<br />
123. Das skizzierte System wird von einem im Massenmittelpunkt<br />
PSfrag replacements<br />
S angreifenden<br />
Moment angetrieben. Nach einer Einschwingphase stellt<br />
ξ<br />
sich ein stationärer Zustand mit kleinen Ausschlägen ein. (Gravitati-<br />
ζ<br />
on spielt keine Rolle.)<br />
P<br />
A<br />
(a) Bestimmen Sie die lineare Bewegungsdifferentialgleichung!<br />
B<br />
(b) Wie groß ist die Kreisfrequenz <strong>der</strong> freien gedämpften Schwin- a<br />
gung?<br />
b<br />
(c) Bestimmen Sie die Amplitude und den Phasenwinkel <strong>der</strong> staM0<br />
tionären Schwingung!<br />
Geg.: a, r, c, m, JS = 2ma 2 , M(t) = M0 cos Ωt<br />
M0 m, JS<br />
k<br />
c<br />
r<br />
S<br />
R<br />
reines Rollen<br />
M(t)<br />
x<br />
c
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 30<br />
Kinematik PSfrag undreplacements Kinetik<br />
ξ<br />
ζ<br />
Version 24. Juni 2004<br />
124. Eine Maschine <strong>der</strong> Gesamtmasse M sei wie skizziert gegen das P<br />
Fundament gelagert. Im Innern rotiert eine Punktmasse m an ei- A<br />
nem Hebel <strong>der</strong> Länge a mit Ω = const.. Die Fe<strong>der</strong> sei <strong>für</strong> x = 0 B<br />
x<br />
spannungsfrei, die Führung reibungsfrei.<br />
a<br />
b<br />
Bestimme die Bewegungsgleichung, Amplitude und Phasenlage <strong>der</strong>M0<br />
Schwingung und den Verlauf x(t)!<br />
c<br />
a<br />
m<br />
Ωt<br />
Geg.: M, m, c, d, a, Ω, x(0) = 0, ˙x(0) = 0<br />
125. Das Ventil eines 4-Takt-Motors wird durch den mit<br />
Ω = ˙ϕN rotierenden Nocken in eine harmonische Bewegung<br />
u(t) versetzt und dabei durch die massebehaftete<br />
Ventilfe<strong>der</strong> (Konstante cF ) gegen den Nocken gedrückt.<br />
Für eine näherungsweise Berechnung <strong>der</strong> Schwingungen<br />
<strong>der</strong> Ventilfe<strong>der</strong> wird ein Ersatzsystem aus zwei idealen<br />
Fe<strong>der</strong>n c ∗ und einer Masse m ∗ = 1<br />
mF gebildet.<br />
3<br />
(a) Bestimme u(t) und ein geeignetes c ∗ !<br />
(b) Berechne die Bewegung x(t) <strong>der</strong> Ersatzmasse m ∗<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A PSfrag replacements<br />
B<br />
ξ<br />
a<br />
ζ<br />
<strong>für</strong> den stationären (eingeschwungenen) Fall.<br />
b<br />
M0<br />
P<br />
A<br />
B<br />
Ersatzsystem<br />
a<br />
<strong>für</strong> cF , mF : b<br />
Geg.: a, cF , mF , ϕN , m ∗ = 1<br />
3 mF<br />
126. Das skizzierte System besteht aus zwei Zahnscheiben,<br />
zwei Fe<strong>der</strong>n und einem Dämpfer und wird von <strong>der</strong> oszillierenden<br />
Kraft F (t) angetrieben. Die Fe<strong>der</strong>n sind in<br />
PSfrag replacements<br />
<strong>der</strong> skizzierten Lage entspannt.<br />
ξ<br />
(a) Bestimme die lineare Bewegungsdifferentialglei-<br />
ζ<br />
chung!<br />
P<br />
A<br />
(b) Bestimme die Kreisfrequenz <strong>der</strong> freien gedämpften<br />
B<br />
Schwingung!<br />
a<br />
(c) Bestimme die Amplitude und den Phasenwinkel b<br />
<strong>der</strong> stationären Schwingung!<br />
Geg.: a, b, r, c, m, JS, F (t) = F0 cos Ωt, F0, Ω<br />
127. Das skizzierte System (homogene Kreisscheibe PSfrag M, replacements Js, masselose<br />
Umlenkrolle, ideales Seil, Masse m, lineare Fe<strong>der</strong> c, ξ<br />
linearer Dämpfer k) erfährt eine Fußpunkterregung u(t) = ζ<br />
û cos Ωt.<br />
P<br />
A<br />
(a) Wieviele Freiheitsgrade hat das System?<br />
B<br />
(b) Stellen Sie die Bewegungsgleichung <strong>für</strong> die Bewegung a<br />
des Scheibenschwerpunktes auf.<br />
b<br />
M0<br />
(c) Berechnen Sie die Lösung im eingeschwungenen Zustand.<br />
(d) Wie kann man die Seilkraft berechnen?<br />
Geg.: M, m, Js = 1<br />
2 Mr2 , c, k, r, û, Ω, g<br />
M0<br />
g<br />
d<br />
M<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡<br />
m<br />
M0<br />
c ∗<br />
r<br />
u(t)<br />
m ∗<br />
c ∗<br />
M, J s<br />
¤ ¦ ¨©<br />
����<br />
������©<br />
§ ¥ £<br />
x(t)<br />
c<br />
k<br />
reines Rollen<br />
u( t )
<strong>Mechanik</strong> 2 Prof. Popov SS 04 M0<br />
Seite 31<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
128. Die Vertikalschwingungen eines Automobils können durch das gezeichnete<br />
Ersatzmodell beschrieben werden. Durch die Koordinaten<br />
y10, y20 ist die Ruhelage des Systems gekennzeichnet.<br />
(a) Bestimme die Bewegungsdifferentialgleichung(en) des Systems!<br />
(b) Wie lautet die charakteristische Gleichung?<br />
(c) Welche Eigenwerte (Eigenkreisfrequenzen) hat das System<br />
ohne Dämpfung (k=0)?<br />
Geg.: m1 = 600kg, m2 = 40kg, c1 = 150N/cm, c2 = 1600N/cm ¡<br />
129. Ein starrer Stab ist auf zwei Fe<strong>der</strong>n und einem Dämpferelement gelagert.<br />
Es sollen kleine Auschläge ausschließlich in senkrechter Richtung<br />
und schwache Dämpfung angenommen werden. Die Gravitation wird<br />
vernachlässigt.<br />
Berechne die Eigenfrequenzen und Eigenformen des Systems!<br />
y<br />
y10<br />
PSfrag replacements<br />
y20<br />
y1<br />
y2<br />
c1<br />
m1<br />
m2<br />
c2<br />
¡ ¡ ¡ ¡ ¡ ¢¡¢¡¢¡¢¡¢¡¢¡¢ ¡<br />
k<br />
Fahrzeugaufbau<br />
Dämpfung,<br />
Fe<strong>der</strong>ung<br />
Achsen,<br />
Rä<strong>der</strong><br />
Reifenfe<strong>der</strong>ung<br />
Geg.: l, c, k, m, JS = ml 2 l l<br />
©¡© �¡� �¡��<br />
� �¡� �¡� ��¡�<br />
�¡� ��¡�<br />
�¡� ��¡�<br />
�¡��<br />
� ¥ ¤ £¡£<br />
PSfrag replacements<br />
130. (a) Für das skizzierte System stelle man das<br />
ξ<br />
Bewegungsdifferentialgleichungssystem auf und<br />
ζ<br />
schreibe es auf Matrizenform um. Es sollen<br />
von vornherein kleine Auslenkungen angenom-<br />
P<br />
men werden.<br />
A<br />
B<br />
(b) Man berechne die Eigenkreisfrequenzen und die<br />
PSfrag replacements a<br />
dazugehörigen Eigenformen des Systems.<br />
Geg.: c1 = 1<br />
4<br />
m, ΘS = 1<br />
2 m1r2 , r<br />
c , c2 = c3 = c , m1 = 2<br />
3<br />
m , m2 =<br />
131. Das skizzierte System schwingt mit kleinen Auslenkungen.<br />
Die Fe<strong>der</strong> und <strong>der</strong> Pendelstab sind masselos. Die<br />
Länge <strong>der</strong> entspannten Fe<strong>der</strong> ist l0.<br />
b<br />
M0<br />
(a) Stelle die Schwingungsdifferentialgleichung (in Matrixschreibweise,<br />
ohne die Spezialisierung in Teil b)<br />
auf!<br />
(b) Bestimme die Eigenkreisfrequenzen als Funktion<br />
von c und m <strong>für</strong> folgenden Spezialfall: m1 = m<br />
33 ,<br />
m2 = m, Θ1 = 1<br />
66 mr2 , Θ2 = 1<br />
2 mr2 , l = 2r, c = mg<br />
33r<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
� �¡��<br />
��<br />
�¡��<br />
�¡��<br />
��<br />
�¡�<br />
§ ¨ ¦<br />
x1<br />
m, JS S<br />
c k<br />
��<br />
�<br />
��<br />
�¡��<br />
�<br />
��<br />
�¡��<br />
�<br />
��<br />
�¡��<br />
�¡� ��<br />
�<br />
Geg.:m1, m2, Θ1, Θ2, l, r, c,<br />
�¡�¡�¡�¡�¡�¡�¡�<br />
g,<br />
�¡�¡�¡�¡�¡�¡�¡�<br />
l0<br />
�¡�¡�¡�¡�¡�¡�¡�<br />
�¡�¡�¡�¡�¡�¡�¡� �¡�¡�¡�¡�¡�¡�¡�<br />
�¡�¡�¡�¡�¡�¡�¡�<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
l<br />
l<br />
Ψ<br />
c<br />
g<br />
ϕ<br />
l0<br />
m2, Θ2<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡� �¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡� �¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
m1, Θ1<br />
PSfrag replacements<br />
132. Eine starre Rechteckplatte ist fe<strong>der</strong>nd in ihren Ecken gelagert. Berechne<br />
die Eigenkreisfrequenzen und -formen.<br />
ξ<br />
ζ<br />
Berücksichtige dabei nur kleine Ausschläge senkrecht zur Plattenebene!<br />
PSfrag replacements<br />
Geg.: a, b, c, m<br />
ξ<br />
P<br />
A<br />
B<br />
ζ a<br />
P b<br />
A M0<br />
133. Im skizzierten System soll die Reibung vernachlässigt werden.<br />
B<br />
a<br />
(a) Stelle die Bewegungsdifferentialgleichungen auf!<br />
b<br />
c1 c2<br />
(b) Bestimme die Eigenfrequenzen und Eigenformen <strong>der</strong> Schwingung<br />
und gib die allgemeine Lösung <strong>der</strong> Schwingungsdifferentialgleichung<br />
an!<br />
Geg.: c1 = 2c, c2 = c, m1 = 2m, m2 =<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
m<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡� �¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
M0<br />
m1<br />
r<br />
x<br />
m2<br />
x2<br />
�¡�¡�¡�¡�¡�¡�¡�¡�¡�¡� �¡�¡�¡�¡�¡�¡�¡�¡�¡�¡�<br />
c<br />
��<br />
�
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
Kinematik<br />
PSfrag replacements<br />
und Kinetik<br />
ξ<br />
ζ<br />
Seite 32<br />
Version 24. Juni 2004<br />
P<br />
134. Im skizzierten schwingungsfähigen System soll die Reibung<br />
A<br />
vernachlässigt werden.<br />
B<br />
a<br />
(a) Schneiden Sie die einzelnen Massen frei und stellen<br />
b<br />
Sie das Bewegungsdifferentialgleichungssystem auf!<br />
1<br />
2 c c<br />
m<br />
c<br />
(b) Stellen Sie die charakteristische Gleichung auf!<br />
(c) Bestimmen Sie die Eigenkreisfrequenzen und dazugehörigen<br />
Eigenformen des Systems!<br />
Geg.: m, c<br />
135. Untersucht werden soll das skizzierte System bei kleinen Ausschlägen.<br />
(a) Stellen Sie das lineare Bewegungsdifferentialgleichungssystem<br />
PSfrag replacements<br />
auf!<br />
ξ<br />
(b) Bestimmen Sie die Eigenkreisfrequenzen und die zugehörigen Ei-<br />
ζ<br />
genschwingungsmoden!<br />
m, J S<br />
Geg.: m, L, J S = 1<br />
12 ml2 , k, g<br />
136. Zwei masselose Stangen <strong>der</strong> Länge l und zwei identische Punktmassen<br />
m bilden wie abgebildet ein Doppelpendel. Untersucht werden<br />
Schwingungen mit kleinen Auslenkungen um die stabile Ruhelage.<br />
Ausschläge größer als 2 ◦ führen zu einem Versagen des Systems. Auf<br />
die obere Stange wirkt ein periodisch verän<strong>der</strong>liches Moment M(t).<br />
(a) Kommt es zum Versagen des mechanischen Systems? Begründen<br />
Sie Ihre Entscheidung mit geeigneten Berechnungen.<br />
(b) Als konstruktive Än<strong>der</strong>ung wird vorgeschlagen, einen viskoser<br />
Drehdämpfer in das mechanische System einzubauen. Wo<br />
ist dieser Dämpfer zu plazieren? Begründen Sie Ihre Entscheidung.<br />
Geg.: l, m, g, M(t) = ˆM sin(Ωt), Ω =<br />
137. Bestimmen Sie <strong>für</strong> das dargestellte System<br />
� (2+ √ 2)g<br />
(a) die Bewegungsdifferentialgleichungen,<br />
(b) die Eigenkreisfrequenzen,<br />
l<br />
, ˆM<br />
M0<br />
1<br />
2 c<br />
PSfrag replacements<br />
ξ<br />
(c) die Bewegungen <strong>der</strong> beiden Massen <strong>für</strong> den eingeschwungenen Zustand,<br />
(d) diejenige Erregerfrequenz, bei <strong>der</strong> die Masse m in Ruhe bleibt,<br />
(e) die kritischen Erregerfrequenzen und<br />
(f) die Vergrößerungsfunktionen!<br />
Gegeben: m, M, c1, c2, r, P (t) = P0<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
cos Ωt<br />
B<br />
2<br />
a<br />
b<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
P<br />
A<br />
B<br />
a<br />
b<br />
M0<br />
¢ £ ¤ ¥<br />
¥ ¦<br />
¦<br />
§<br />
§ ¨<br />
¨<br />
©¡©<br />
©¡© �<br />
�<br />
�¡�<br />
�¡�<br />
�¡�<br />
�¡�<br />
¡<br />
l<br />
M0<br />
P (t)<br />
ϕ<br />
m<br />
m<br />
l<br />
l<br />
l<br />
ψ<br />
M(t) = ˆ M sin(Ωt)<br />
m<br />
c1<br />
P (t)<br />
c2<br />
M<br />
r<br />
k<br />
g<br />
m, J S<br />
g<br />
x<br />
m<br />
ϕ
<strong>Mechanik</strong> 2 Prof. Popov SS 04<br />
Kinematik und Kinetik<br />
P<br />
A<br />
B<br />
a<br />
b<br />
Seite 33<br />
Version 24. Juni 2004<br />
138. Zwei masselose elastische Balken (Biegesteifigkeit EI) sind zu einem<br />
rechtwinkligen Träger zusammengeschweißt. Der Träger ist an einem Ende<br />
fest eingespannt und trägt am an<strong>der</strong>en Ende eine Punktmasse m.<br />
Untersucht werden Schwingungen mit kleinen Auslenkungen u und v.<br />
Am Punkt B wirkt auf den Träger ein periodisch verän<strong>der</strong>liches Moment<br />
M(t).<br />
M0<br />
g<br />
M(t)<br />
(a) Bestimmen Sie die Bewegungsdifferentialgleichungen, die kleine<br />
Schwingungen des Systems beschreiben.<br />
(b) Wie lauten die Eigenfrequenzen des Systems?<br />
(c) Berechnen Sie die Lösung im eingeschwungenen Zustand <strong>für</strong> den<br />
Fall, daß die Erregerfrequenz Ω nicht eine <strong>der</strong> Eigenfrequenzen ist.<br />
Geg.: l, m, g, M(t) = ˆ M sin(Ωt), ˆ PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
M<br />
B<br />
a<br />
139. Im Betrieb liegengebliebene U-Bahnzüge wer- b<br />
den in <strong>der</strong> Regel mit betrieblichen Mitteln, d. h. M0<br />
x<br />
durch den nächstfolgenden Zug von <strong>der</strong> Strecke<br />
geschoben. Wenn beim Abschieben plötzlich die<br />
Notbremse ausgelöst wird, kann es zu hohen dy-<br />
Fe(t) 1 2<br />
namischen Kräften in den Kupplungen und sogar<br />
zum Abriss <strong>der</strong> Kupplungen kommen.<br />
U-Bahn<br />
Für ein erstes Studium <strong>der</strong> Längsdynamik soll ein sehr stark vereinfachtes Modell zweier U-Bahnen betrachtet<br />
werden. Die U-Bahnen seien in sich starr (Zugmasse m) und durch eine lineare Kupplung (Fe<strong>der</strong>steifigkeit k)<br />
verbunden. Auf den linken Wagen 1 wirkt die Antriebs- bzw. Bremskraft Fe, auf den defekten rechten Wagen<br />
2 wirkt nur die Kupplungskraft Fk. Der Zugverband fährt nach rechts (positive x-Richtung).<br />
Die maximale Kupplungskraft soll <strong>für</strong> den Fall berechnet werden, daß die äußere Kraft sich sprungartig von<br />
ˆFe > 0 (Beschleunigen) zu − ˆFe < 0 (Bremsen) än<strong>der</strong>t.<br />
(a) Zeigen Sie, daß zur Bestimmung <strong>der</strong> maximalen Kupplungskraft die Betrachtung eines Einmassenschwingers<br />
genügt.<br />
(b) Stellen Sie die Bewegungsdifferentialgleichung <strong>für</strong> den Einmassenschwinger auf. Wie groß ist die Eigenkreisfrequenz?<br />
PSfrag replacements<br />
(c) Lösen Sie die Bewegungsdifferentialgleichung <strong>für</strong> die angegebene ξ Anregung und bestimmen Sie die maximale<br />
Kupplungskraft.<br />
ζ<br />
P<br />
140. Ein fe<strong>der</strong>nd gelagerter Rotor mit <strong>der</strong> Masse m1 trägt am Radius<br />
A<br />
r eine Unwucht <strong>der</strong> Masse m0. Durch ein zweites Fe<strong>der</strong>paar ist<br />
B<br />
eine weitere Masse m2 mit dem Rotor verbunden.<br />
a<br />
x2 m2<br />
g<br />
b<br />
(a) Die Bewegung soll um die statische Ruhelage beschrieben M0<br />
werden. Die Koordinaten x1 und x2 sollen die Lage <strong>der</strong><br />
c2<br />
2 Ωt c2<br />
2<br />
Massen in Bezug auf die (bzw. abgemessen von <strong>der</strong>) statische(n)<br />
Ruhelage angeben. Wie groß sind die Fe<strong>der</strong>kräfte<br />
m0<br />
in <strong>der</strong> statischen Ruhelage?<br />
x1<br />
r<br />
(b) Stelle <strong>für</strong> Ω = konst. die Bewegungsgleichungen des Systems<br />
auf!<br />
(c) Berechne die Eigenkreisfrequenzen des Systems!<br />
(d) Bei welcher Winkelgeschwindigkeit bleibt <strong>der</strong> Rotor m1<br />
in Ruhe (x1(t) ≡ 0)?<br />
Geg.: m0, m1, m2, c1, c2, r, Ω, g<br />
m1<br />
c1<br />
2<br />
2l<br />
B<br />
A<br />
c1<br />
2<br />
l<br />
m<br />
U-Bahn<br />
v<br />
C<br />
y<br />
u<br />
x
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 34<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
141. Man berechne <strong>für</strong> die eingezeichnete Anordnung dieA<br />
Grenzen des Winkels α, bei denen das System geradeB<br />
noch nicht rutscht. Die Haftreibkoeffizienten seien zwi- a g<br />
schen <strong>der</strong> schiefen Ebene und dem Körper 2 µ2 = 0, 2 b<br />
bzw. zwischen den Körpern 2 und 3 µ1 = 0, 3. M0<br />
PSfrag replacements<br />
Geg.: G1 = G, G2 = G, G3 = 2G, µ1 = 0, 3, µ2 = 0, 2<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
142. Der gelenkig gelagerte homogene Qua<strong>der</strong> (Masse m, Kan- ag<br />
tenlänge L) drückt einen homogenen Kreiszylin<strong>der</strong> (Masse b<br />
M0<br />
m, Radius r) gegen eine vertikale Wand. Wie groß muß h<br />
sein, damit <strong>der</strong> Kreiszylin<strong>der</strong> nicht nach unten rutscht?<br />
4 Haften<br />
Geg.: µ1 = 0, 4, µ2 = 0, 2, m, g, L, r<br />
µ2<br />
L<br />
PSfrag replacements<br />
143. Das abgebildete System besteht aus zwei identischen Balken, ξdie<br />
in C gelenkig miteinan<strong>der</strong> verbunden sind.<br />
Balken AC ist in A gelagert; Balken CE stützt sich an einemζEnde auf einer rauhen Unterlage (Haftreibwert<br />
µ) ab. Vom Punkt D aus ist ein Seil über Rollen in B und C gespannt, P das durch die Gewichtskraft G belastet<br />
wird. Die Rollen seien reibungsfrei und von vernachlässigbar kleinem A Durchmesser. Die Balken seien masselos.<br />
B<br />
a<br />
b<br />
M0<br />
l<br />
C<br />
g<br />
(a) Bestimmen Sie die Größe <strong>der</strong> in E wirkenden Haftkraft<br />
H in Abhängigkeit des Winkels α. Skizzieren<br />
Sie den Verlauf <strong>für</strong> das Intervall 0 ◦ ≤ α ≤ 90 ◦ unter<br />
Angabe charakteristischer Werte.<br />
(b) Für welche Winkel αk ist das System auch ohne<br />
Haftung im Gleichgewicht?<br />
(c) Welchen Wert µerf muß <strong>der</strong> Haftreibwert<br />
überschreiten, damit das System <strong>für</strong> alle Winkel<br />
30 ◦ ≤ α ≤ 60 ◦ nicht zu rutschen beginnt?<br />
α<br />
Geg.: G, l<br />
A<br />
144. Zwei Klötze (Gewichtskräfte G1 und G2) sind durch eine starre Stange S<br />
miteinan<strong>der</strong> verbunden und werden wie dargestellt auf eine schiefe und<br />
eine flache Ebene gelegt (Reibwert µH).<br />
(a) Wie groß darf (<strong>für</strong> α ≤ 45 ◦ ) das Verhältnis G1/G2 werden, so dass<br />
die Klötze noch haften?<br />
(b) Wie groß darf G1/G2 <strong>für</strong> den Spezialfall α = 45 ◦ PSfrag replacements<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
PSfrag replacements b<br />
ξ M0<br />
ζ<br />
und µH = 0, 5<br />
werden?<br />
P<br />
A<br />
B<br />
a<br />
b<br />
145. Ein Stab wird durch eine reibungsfreie Führung gesteckt und an einer<br />
M0<br />
Wand so abgestützt, dass in ihn eine Kraft F eingeleitet werden kann.<br />
(a) In welchem Abstand d von <strong>der</strong> Wand muss F angreifen, wenn<br />
<strong>für</strong> die Haftreibung zwischen Wand und Stab µH = 0, 2 gilt?<br />
Bestimme d <strong>für</strong> den Spezialfall l = 1m und α = 30 ◦ A<br />
B<br />
A<br />
!<br />
(b) Wie groß wäre d <strong>für</strong> eine glatte Wand? Berechne d auch hier <strong>für</strong><br />
den Spezialfall!<br />
µ<br />
l<br />
G1<br />
h<br />
B<br />
µ1<br />
G<br />
G2<br />
α<br />
l<br />
S1<br />
µH<br />
S<br />
d<br />
α<br />
D<br />
E<br />
α<br />
G2<br />
µ<br />
G1<br />
G3<br />
F<br />
L<br />
µH
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 35<br />
Kinematik PSfrag replacements und Kinetik<br />
ξ<br />
ζ<br />
P<br />
A<br />
B<br />
a<br />
Version 24. Juni 2004<br />
b<br />
146. Zwei Massen M und m, mit den Reibungskoeffizienten<br />
M0<br />
µ1 bzw. µ2 gegenüber <strong>der</strong> rauen Unterlage, sind durch<br />
einen masselosen starren Stab verbunden und gleiten eine<br />
schiefe Ebene hinab. An <strong>der</strong> Masse m greift zusätzlich<br />
noch eine Kraft P an.<br />
y<br />
M<br />
S<br />
m<br />
P<br />
g<br />
5 Weitere Aufgaben<br />
Geg.: M, m, P , g, µ1, µ2, α<br />
(a) Bestimmen Sie die Stabkraft S !<br />
PSfrag replacements<br />
(b) Wie groß ist die Beschleunigung des Systems?<br />
ξ<br />
(c) Wie groß ist die Geschwindigkeit in Abhängigkeit vom zurückgelegten ζ Weg, wenn die Kraft P = 0, die<br />
Reibungskoeffizienten µ1 = µ2 = µ sind und die Massen mit <strong>der</strong> Anfangsgeschwindigkeit P<br />
v0 hinabgestoßen<br />
wurden?<br />
A<br />
(d) Nach welcher Strecke kommen die Massen zur Ruhe? Unter welchen B Umständen ist dies möglich?<br />
a<br />
147. Eine Masse m soll mit einem Stabzweischlag wie abgebildet gelagert wer- b<br />
den. Beide Stäbe bestehen aus dem gleichen Werkstoff (E-Modul E) und M0<br />
haben die gleiche konstante Querschnittsfläche A. Die Masse <strong>der</strong> Stäbe<br />
sei gegenüber <strong>der</strong> Masse m vernachlässigbar.<br />
Für die folgenden Untersuchungen seien kleine Auslenkungen <strong>der</strong> Masse<br />
vorausgesetzt.<br />
ex A<br />
ey 1<br />
α<br />
F<br />
(a) Stellen Sie die Bewegungsdifferentialgleichungen <strong>für</strong> die Bewegung<br />
<strong>der</strong> Masse m auf. Schreiben Sie die Gleichungen auch in Matrixform.<br />
(b) Bestimmen Sie die Eigenfrequenzen des Systems.<br />
Geg.: F , a, E, A<br />
x<br />
m<br />
a<br />
α<br />
B 2 C<br />
148. Eine Holzkugel <strong>der</strong> Masse m wird aus <strong>der</strong> Höhe h0 über einer festen Unterlage aus dem gleichen Holz losgelassen.<br />
Die Kugel erreicht beim Rückprall die geringere Höhe h1.<br />
Die Aufgabe ist in folgenden Schritten zu bearbeiten.<br />
(a) Leiten Sie zunächst die Formel<br />
¯v1 − ¯v2<br />
e = −<br />
v1 − v2<br />
PSfrag replacements<br />
<strong>für</strong> den zentrischen, teilelastischen Stoß zweier Körper her. Erklären Sie alle Formelzeichen.<br />
ξ<br />
(b) Nun soll das eingangs beschriebene Problem bearbeitet werden. Die ζ Höhen h0 und h1 wurden gemessen.<br />
Berechnen Sie daraus die Stoßzahl e.<br />
P<br />
(c) Geben Sie eine rekursive und eine explizite Formel zur Berechnung A <strong>der</strong> Rückprallhöhe hi nach dem iten<br />
Stoß an.<br />
B<br />
a<br />
149. Eine dünne Scheibe (Masse m, Radius R) rotiert mit konstanter Win- b<br />
kelgeschwindigkeit ω2 um die horizontale Achse AB. Zudem rotiert das M0<br />
ω1<br />
System um die vertikale Achse OA mit ebenfalls konstanter Winkelgeschwindigkeit<br />
ω1.<br />
D<br />
g<br />
Bestimmen Sie die Kraft S im Seil CD unter <strong>der</strong> Annahme, daß die<br />
Masse <strong>der</strong> Scheibe deutlich größer ist als die Massen <strong>der</strong> an<strong>der</strong>en Teile.<br />
Geg.: m = 35 kg, R = 0,5 m, ω2 = 15 s −1 , ω1 = 8 s −1 , a = 1 m,<br />
b = 0,75 m<br />
A<br />
O<br />
45 o<br />
b<br />
a<br />
C<br />
B<br />
R<br />
ω2
<strong>Mechanik</strong> 2 Prof. Popov SS 04 Seite 36<br />
Kinematik und Kinetik<br />
Version 24. Juni 2004<br />
Inhaltsverzeichnis<br />
1 Grundlagen Kinematik 1<br />
2 Grundlagen Kinetik 8<br />
3 Schwingungen 27<br />
4 Haften 34<br />
5 Weitere Aufgaben 35