

Modellbildung, Simulation und Regelung dynamischer ... - Dieter Kraft
Modellbildung, Simulation und Regelung dynamischer ... - Dieter Kraft
Modellbildung, Simulation und Regelung dynamischer ... - Dieter Kraft

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
✲ b n−1<br />
✲<br />
s n−1<br />
✲ b n−2<br />
✲ s n−2<br />
✲<br />
b 1<br />
✲<br />
s<br />
(n)<br />
(n−1)<br />
(n−2)<br />
u<br />
ξ<br />
ξ<br />
ξ<br />
˙ξ ξ<br />
✲ + ♠ ✲ 1 ✲ 1 ✲ 1 <br />
✒ ❅■ s<br />
s<br />
s<br />
✻<br />
✲ b 0<br />
❅ ❅❘ ❄ ✠ <br />
✲ + ♠<br />
y<br />
-a n−1 ✛<br />
-a n−2 ✛<br />
−a 0<br />
✛<br />
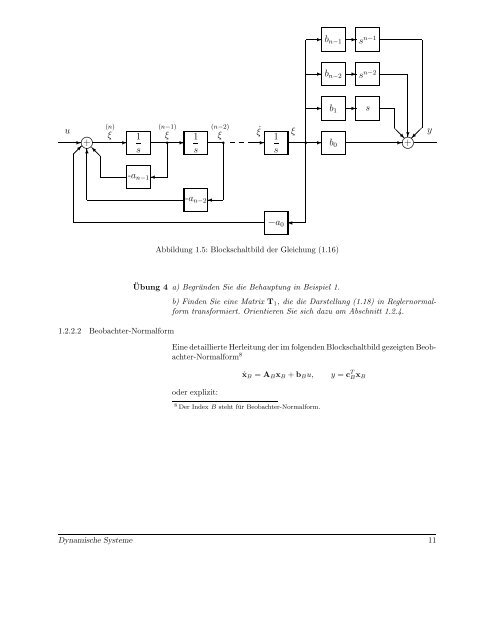
Abbildung 1.5: Blockschaltbild der Gleichung (1.16)<br />
1.2.2.2 Beobachter-Normalform<br />
Übung 4 a) Begründen Sie die Behauptung in Beispiel 1.<br />
b) Finden Sie eine Matrix T 1 , die die Darstellung (1.18) in Reglernormalform<br />
transformiert. Orientieren Sie sich dazu am Abschnitt 1.2.4.<br />
Eine detaillierte Herleitung der im folgenden Blockschaltbild gezeigten Beobachter-Normalform<br />
8 ẋ B = A B x B + b B u, y = c T B x B<br />
oder explizit:<br />
8 Der Index B steht für Beobachter-Normalform.<br />
Dynamische Systeme 11