Jahresbericht 2009 - Institute of Computer Science - Universität ...
Jahresbericht 2009 - Institute of Computer Science - Universität ...
Jahresbericht 2009 - Institute of Computer Science - Universität ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
64 Universität Osnabrück Institut für Informatik <strong>Jahresbericht</strong> <strong>2009</strong> Projekte<br />
Assistenzroboter in Laboren von Life-<strong>Science</strong>-Unternehmen (LISA)<br />
Leitung<br />
Mitarbeiter<br />
Partner<br />
Pr<strong>of</strong>. Dr. Joachim Hertzberg<br />
M.Sc. Stefan Stiene<br />
Fraunh<strong>of</strong>er IFF (Koordinator), amtec robotics,<br />
Fox GmbH, Jenoptik, KeyNeurotek AG, project:syntropy, Sympalog<br />
BMBF<br />
Förderung<br />
Laufzeit 04/2006–07/<strong>2009</strong><br />
Stichworte<br />
Web<br />
Assistenzroboter, Roboterkontrollarchitektur, 3D-Roboterkartierung, Roboternavigation<br />
http://www.inf.uos.de/kbs/LISA.html<br />
Im Projekt LISA wird ein autonom agierender, zur<br />
Manipulation fähiger Roboter für den Einsatz in<br />
Life-<strong>Science</strong> Laboren entwickelt; der Roboter soll<br />
das Laborpersonal beispielsweise durch Hol- und<br />
Bringdienste oder Bestückung von Analysegeräten<br />
mit Proben bei der Arbeit unterstützen. Für den<br />
Roboter sind insbesondere Fragen der Arbeits- und<br />
Betriebssicherheit zu berücksichtigen, da er im<br />
Umfeld des Laborpersonals arbeitet. Arbeitsabläufe<br />
und Laborobjekte (Zentrifugen, Probenträger etc.)<br />
und auch die Räumlichkeiten (Labore, Flure etc.)<br />
sollen unverändert bleiben. LISA wird vom BMBF<br />
innerhalb des Rahmenkonzeptes »Forschung für<br />
die Produktion von morgen« gefördert (Förderkennzeichen<br />
02PB2170 bis 02PB2177, betreut vom<br />
Projektträger PTKA-PFT). Das Projekt wurde zum<br />
31.07.<strong>2009</strong> abgeschlossen.<br />
Im Rahmen des Gesamtprojekts bearbeitet die Universität<br />
Osnabrück zwei emen federführend: Spezifikation<br />
und Fortschreibung der Systemarchitektur<br />
für das Gesamtsystem (Hardware und S<strong>of</strong>tware)<br />
einschließlich der Implementierung des Gerüsts für<br />
die gesamte Robotersteuerungss<strong>of</strong>tware; und die<br />
Navigation der mobilen Roboterplattform. Navigation<br />
umfasst die Bewegungssteuerung des Roboters,<br />
aber auch Planungsaufgaben und die vorgelagerte<br />
Erstellung einer 3D-Karte der Umgebung, die außer<br />
zur Planung auch für die Nutzungsinteraktion des<br />
Roboters verwendet wird. Eine 3D-Karte der aktuellen<br />
Laborumgebung wurde unter Verwendung der<br />
Vorarbeiten aus dem KURT-3D-Projekt erstellt.<br />
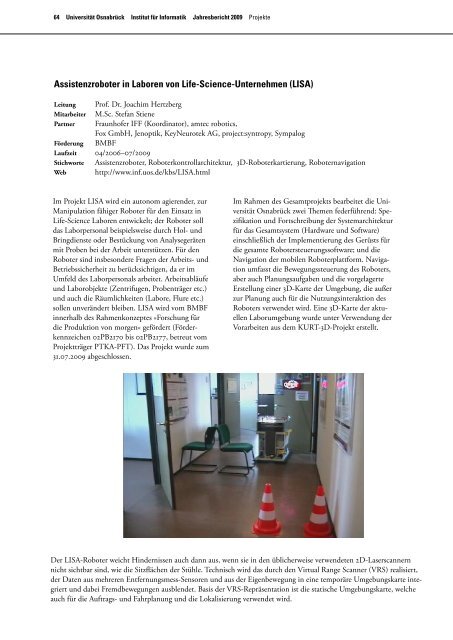
Der LISA-Roboter weicht Hindernissen auch dann aus, wenn sie in den üblicherweise verwendeten 2D-Laserscannern<br />
nicht sichtbar sind, wie die Sitzflächen der Stühle. Technisch wird das durch den Virtual Range Scanner (VRS) realisiert,<br />
der Daten aus mehreren Entfernungsmess-Sensoren und aus der Eigenbewegung in eine temporäre Umgebungskarte integriert<br />
und dabei Fremdbewegungen ausblendet. Basis der VRS-Repräsentation ist die statische Umgebungskarte, welche<br />
auch für die Auftrags- und Fahrplanung und die Lokalisierung verwendet wird.