Gesamtantrieb aus mehreren mechanisch zusammen gekoppelten ...
Gesamtantrieb aus mehreren mechanisch zusammen gekoppelten ...
Gesamtantrieb aus mehreren mechanisch zusammen gekoppelten ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
*DE102007062738A120090402*<br />
(19)<br />
Bundesrepublik Deutschland<br />
Deutsches Patent- und Markenamt<br />
(10)<br />
DE 10 2007 062 738 A1 2009.04.02<br />
(12)<br />
Offenlegungsschrift<br />
(21) Aktenzeichen: 10 2007 062 738.8<br />
(22) Anmeldetag: 27.12.2007<br />
(43) Offenlegungstag: 02.04.2009<br />
(66) Innere Priorität:<br />
10 2006 061 527.1 27.12.2006<br />
(71) Anmelder:<br />
Lenze Drive Systems GmbH, 31855 Aerzen, DE<br />
(51) Int Cl. 8 : G05B 24/00 (2006.01)<br />
H02P 5/74 (2006.01)<br />
(74) Vertreter:<br />
Leonhard Olgemöller Fricke, 80331 München<br />
(72) Erfinder:<br />
Fraeger, Carsten, 31787 Hameln, DE<br />
Die folgenden Angaben sind den vom Anmelder eingereichten Unterlagen entnommen<br />
(54) Bezeichnung: <strong>Gesamtantrieb</strong> <strong>aus</strong> <strong>mehreren</strong> <strong>mechanisch</strong> <strong>zusammen</strong> <strong>gekoppelten</strong> Antrieben und Regelung für<br />
diesen Mehrfachantrieb<br />
(57) Zusammenfassung: Die Aufgabe der Erfindung liegt<br />
darin, bei drehzahlgeregelten Antrieben mit hoher Leistung<br />
und gleichzeitig hohen Anforderungen an die Genauigkeit<br />
oder Dynamik einen sehr hohen Aufwand für die Leistungselektronik<br />
(hohe Taktfrequenz), den Motor (hohe Präzision)<br />
und die <strong>mechanisch</strong>e Übertragung (spielarme Übertragungselemente)<br />
zu reduzieren. Vorgeschlagen wird dazu<br />
eine Antriebseinrichtung für Bewegungen rotatorischer<br />
und/oder translatorischer Art. Die Antriebseinrichtung hat<br />
mehrere Antriebe (10, 20) zum gemeinsamen, <strong>mechanisch</strong><br />
<strong>gekoppelten</strong> Antrieb einer Arbeitsmaschine oder zur Bewegung<br />
einer Masse. Sie besitzt außerdem eine Steuereinrichtung<br />
(24, 14). Zumindest ein Antrieb (10) ist zur Bereitstellung<br />
der Leistung (als Leistungsantrieb, 10) vorgesehen.<br />
Vorgesehen und <strong>mechanisch</strong> gekoppelt ist zumindest<br />
ein weiterer Antrieb (20) als Regelantrieb zur Steuerung<br />
oder Regelung der Genauigkeit und/oder Dynamik des <strong>Gesamtantrieb</strong>s.<br />
Die Steuereinrichtung (24, 14) steuert und<br />
regelt die zumindest zwei <strong>mechanisch</strong> <strong>gekoppelten</strong> Antriebe<br />
(10, 20).<br />
1/13
DE 10 2007 062 738 A1 2009.04.02<br />
Beschreibung<br />
[0001] Die Erfindung umfasst einen zumindest Doppelantrieb und eine Regelung für einen solchen zumindest<br />
Doppelantrieb, bestehend <strong>aus</strong> zumindest zwei parallel arbeitenden Antrieben, zumeist drehzahlveränderlich.<br />
Dabei ist ein Antrieb für die kostengünstige Bereitstellung der Leistung zuständig, der andere Antrieb für die<br />
Genauigkeit des <strong>Gesamtantrieb</strong>s verantwortlich ist.<br />
[0002] Bei Antrieben mit hoher Leistung und gleichzeitig hohen Anforderungen an die Genauigkeit oder Dynamik<br />
ist ein sehr hoher Aufwand für die Leistungselektronik (hohe Taktfrequenz), den eigentlichen Antrieb<br />
(hohe Präzision) und die <strong>mechanisch</strong>e Übertragung (spielarme Übertragungselemente) erforderlich.<br />
[0003] Besonders ist bei drehzahlgeregelten Antrieben mit hoher Leistung und gleichzeitig hohen Anforderungen<br />
an die Genauigkeit oder Dynamik ist ein sehr hoher Aufwand für die Leistungselektronik (hohe Taktfrequenz),<br />
den Motor (hohe Präzision) und die <strong>mechanisch</strong>e Übertragung (spielarme Übertragungselemente) erforderlich.<br />
Bei sehr hohen Anforderungen werden Direktantriebe eingesetzt, z. B. Linearmotoren, um Spiel und<br />
Elastizität der <strong>mechanisch</strong>en Übertragung zu eliminieren. Dieser hohe Aufwand tritt besonders bei Linearantrieben<br />
und langsam drehenden Direktantrieben zu Tage. Neben den hohen Kosten weisen die Antriebe ein<br />
großes Volumen und einen schlechten Wirkungsgrad auf.<br />
[0004] Bei sehr hohen Anforderungen werden Direktantriebe eingesetzt, z. B. Linearmotoren, um Spiel und<br />
Elastizität der <strong>mechanisch</strong>en Übertragung zu eliminieren. Dieser hohe Aufwand tritt besonders bei Linearantrieben<br />
und langsam drehenden Direktantrieben zu Tage. Neben den hohen Kosten weisen die Antriebe ein<br />
großes Volumen und einen schlechten Wirkungsgrad auf.<br />
[0005] Hier soll Abhilfe geschaffen werden.<br />
Aufgabe und Problemstellung.<br />
[0006] Bei drehzahlgeregelten Antrieben mit hoher Leistung und gleichzeitig hohen Anforderungen an die Genauigkeit<br />
oder Dynamik ist ein sehr hoher Aufwand für die Leistungselektronik (hohe Taktfrequenz), den Motor<br />
(hohe Präzision) und die <strong>mechanisch</strong>e Übertragung (spielarme Übertragungselemente) erforderlich. Bei sehr<br />
hohen Anforderungen werden Direktantriebe eingesetzt, z. B. Linearmotoren, um Spiel und Elastizität der <strong>mechanisch</strong>en<br />
Übertragung zu eliminieren. Dieser hohe Aufwand tritt besonders bei Linearantrieben und langsam<br />
drehenden Direktantrieben zu Tage. Neben den hohen Kosten weisen die Antriebe ein großes Volumen und<br />
einen schlechten Wirkungsgrad auf.<br />
Lösung.<br />
[0007] Der <strong>Gesamtantrieb</strong> besteht <strong>aus</strong> zumindest zwei separaten Antrieben (Antriebskonzept). Der zumindest<br />
eine erste Antrieb (Leistungsantrieb) ist für die kostengünstige Bereitstellung einer hohen Leistung optimiert,<br />
beispielsweise durch kleine Schaltfrequenz für den Frequenzumrichter, z. B. bis nur 2 kHz, sensorloser<br />
Betrieb, einfacher Motor, z. B. Drehstrom-Asynchronmotor mit normaler Drehzahl, Standardgetriebe mit normalem<br />
Spiel zur Anpassung der Motordrehzahl an die Arbeitsmaschinen-Drehzahl, Zahnriemen zur Übertragung<br />
der Drehbewegung in die lineare Bewegung. Der zumindest eine zweite Antrieb (Regelantrieb) ist für die<br />
Genauigkeit der Bewegung zuständig. Er kompensiert die Fehler des Leistungsantriebs. Zur Kompensation ist<br />
nur eine kleine Leistung erforderlich, so dass sich kostengünstig ein Regelantrieb aufbauen lässt. Rechnungen<br />
für verschiedene Antriebe haben gezeigt, dass ca. 5% der Gesamtleistung für den Regelantrieb benötigt werden.<br />
Das Zusammenspiel der beiden Antriebe wird durch eine Regelung vorgenommen, die die Ungenauigkeiten<br />
des Leistungsantriebs misst und den Regelantrieb zur Kompensation ansteuert. Dies kann z. B. mit einem<br />
Servoregler mit zwei Istwerteingängen realisiert werden.<br />
[0008] Bei hohen Antriebsleistungen kann der größte Teil der Leistung über kostengünstige elektro<strong>mechanisch</strong>e<br />
Antriebe <strong>aus</strong> Umrichter, Motor und Getriebe zur Verfügung gestellt werden (z. B. 8200, MDEMA, GST,<br />
GKS). Die Genauigkeit und Dynamik stellt ein wesentlich kleinerer Servoantrieb zur Verfügung. Der Servoantrieb<br />
kann dabei die komplette Sollwertverarbeitung und Regelung übernehmen und dem Umrichter die Sollwerte<br />
zur Verfügung stellen.<br />
[0009] Zur Regelung werden im Beispiel eine angepasste Regelungsstruktur und zwei Istwerteingänge verwendet,<br />
wie sie am in Benutzung befindlichen Lenze ECS, 9300, oder Lenze 9400 Antriebsregler vorhanden<br />
sind. In Summe entsteht damit <strong>aus</strong> Standardkomponenten ein kostengünstiger und leichter Antrieb, dessen<br />
2/13
DE 10 2007 062 738 A1 2009.04.02<br />
Eigenschaften mit denen von teuren und schweren Direktantrieben vergleichbar sind.<br />
[0010] Der "Doppel"antrieb besteht <strong>aus</strong><br />
• Zumindest einem kostengünstigen Antrieb zur Bereitstellung der Leistung<br />
• Zumindest einem kleinen Antrieb zur Bereitstellung der Genauigkeit<br />
[0011] In Summe entsteht eine Lösung für genaue Antriebe <strong>aus</strong> kostengünstigen Standardkomponenten, z.<br />
B.:<br />
• Linearantrieb mit Zahnriemen statt Linearmotor<br />
• Antrieb mit Standardgetriebe statt Direktantrieb oder hochgenaue Robotergetriebe<br />
[0012] Der Doppelantrieb hat wesentlichen Vorteile gegenüber konventionellen Direktantriebslösungen:<br />
• geringere Kosten (im Beispiel fast 50% geringer)<br />
• geringeres Gewicht (im Beispiel 70% weniger)<br />
• Aufbau des Leistungspfades <strong>aus</strong> Komponenten eines verfügbaren Standardprogramms<br />
[0013] Anspruchsvolle Antriebsaufgaben werden mit kostengünstigen Komponenten <strong>aus</strong> einem Standardportfolio<br />
gelöst. Es können mehrere erste und/oder mehrere zweite Antriebe eingesetzt werden.<br />
[0014] Beansprucht ist eine Antriebseinrichtung (Anspruch 1) und ein solches Verfahren (Anspruch 28) zum<br />
Antrieb einer Last – im weitereren Sinne – über mehrere Antriebe gemeinsam.<br />
[0015] Ausführungsbeispiele erläutern (und ergänzen) die Erfindung.<br />
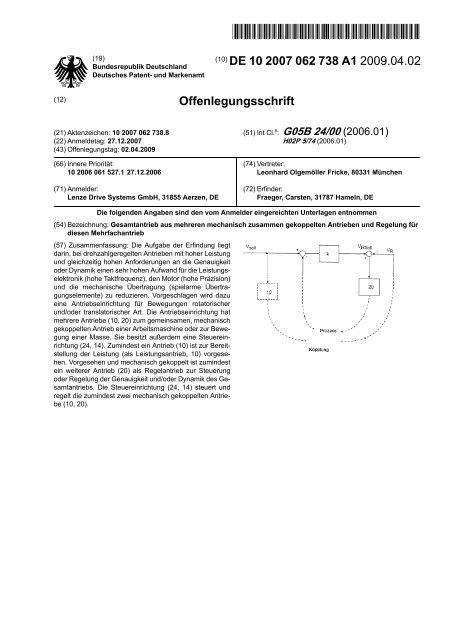
[0016] Fig. 1 ist ein Blockschaltbild für einen Linearantrieb.<br />
[0017] Fig. 2 ist eine her<strong>aus</strong> vergrößerte Regelschaltung, wobei der linke Antrieb 10 eine Steuerung und der<br />
rechte Antrieb 20 eine Drehzahlregelung erhält. Diese Regelschaltung kann auch für andere Konzepte eingesetzt<br />
werden.<br />
[0018] Fig. 3 ist ein Beispiel eines Antriebskonzepts für einen Linearantrieb.<br />
[0019] Fig. 4 ist eine mögliche Zusammenstellung von Komponenten eines konventionellen Direktantriebs.<br />
[0020] Fig. 5 ist ein Preisvergleich des Doppelantriebs und des konventionellen Antriebs.<br />
[0021] Der Aufbau wird anhand eines Linearantriebs erläutert. Folgende Bilder zeigen die Struktur der Antriebseinrichtung,<br />
sh. Fig. 1 und Fig. 2 mit der Regeleinheit.<br />
[0022] Der Leistungsantrieb 10 besteht <strong>aus</strong> einem Frequenzumrichter 11, einem Drehstrommotor 12 und einem<br />
Getriebe 13. Das Getriebe treibt den Zahnriemen Z für eine Linearbewegung v an. Aufgrund der Riemenvorspannung<br />
ist der Zahnriemen spielfrei mit dem Zahnriemenrad verbunden. Mit dem Zahnriemenrad D L<br />
ist<br />
ein Drehgeber TX oder 25 verbunden. Alternativ kann der Drehgeber über ein eigenes Rad spielfrei mit dem<br />
Zahnriemen verbunden sein. Der Leistungsantrieb 10 erhält den Sollwert als den Geschwindigkeitssollwert für<br />
den gesamten Antrieb über Schaltung 14 auf den Frequenzumrichter 11.<br />
[0023] Der Regelantrieb 20 treibt die Zahnriemenrolle D R<br />
am anderen Ende des Zahnriemens an. Er besteht<br />
<strong>aus</strong> einem drehzahlgeregelten Servoantrieb mit Servomotor 22, Umrichter 21 und Regler 24, Drehgeber 26.<br />
[0024] Der Regelantrieb erhält (für den Regler 24) als Sollwert die Differenz V diff<br />
<strong>aus</strong> dem Geschwindigkeitssollwert<br />
für den gesamten Antrieb und dem Istwert des Gebers TX oder 25 an der Zahnriemenrolle des Leistungsantriebs<br />
10. Diese Differenz wird so mit einem Faktor A multipliziert und dem Regelantrieb 20 als Sollwert<br />
gegeben, dass der Regelantrieb die Fehler des Leistungsantriebs vollständig kompensiert, zumindest im Wesentlichen<br />
(nahezu), vgl. Fig. 2.<br />
[0025] Berechnungen haben gezeigt, dass der Regelantrieb nicht mehr als 5% ... 10% der Leistung des Leistungsantriebs<br />
aufzubringen bräuchte. Dementsprechend fällt der Regelantrieb klein und kostengünstig <strong>aus</strong>.<br />
3/13
DE 10 2007 062 738 A1 2009.04.02<br />
Beispiel für einen Linearantrieb<br />
[0026] Ein konkretes Beispiel für einen Linearantrieb mit folgenden Daten verdeutlicht die Zusammenhänge,<br />
vgl. Fig. 3.<br />
[0027] Mit diesem Doppelantrieb erhält der <strong>Gesamtantrieb</strong> in etwa das Verhalten als wenn die hohe Leistung<br />
von 65 kW über einen Direktantrieb ohne Getriebe auf den Zahnriemen übertragen würde.<br />
Regelung<br />
[0028] Damit der Regelantrieb die Fehler des Leistungsantriebs ganz <strong>aus</strong>gleichen kann, wird die Verstärkung<br />
A passend gewählt.<br />
[0029] Der Leistungsantrieb <strong>aus</strong> Umrichter, Motor und Getriebe hat eine nichtlineare Übertragungsfunktion L,<br />
der Regelantrieb <strong>aus</strong> Umrichter, Motor und Regelung die lineare Übertragungsfunktion R:<br />
(trotz der nichtlinearen Verhältnisse wird vereinfachend die komplexe Darstellung genommen)<br />
[0030] Die Geschwindigkeit v der Masse m ergibt sich <strong>aus</strong> der Kopplung der beiden Antriebe über den Zahnriemen<br />
<strong>aus</strong> der Überlagerung der beiden Drehzahlen.<br />
v = C CL·π·D L·n List<br />
+ C CR·π·D R·n Rist<br />
[0031] Dabei sind C CL<br />
und C CR<br />
Übertragungsfunktionen zwischen den Zahnriemenrädern und der Masse m.<br />
[0032] Zur Kompensation der Fehler des Leistungsantriebs wird die Verstärkung A folgendermaßen gewählt:<br />
[0033] Mit dieser Verstärkung werden die Fehler des Leistungsantriebs vollständig <strong>aus</strong>geregelt. Dabei ist die<br />
erforderliche Verstärkung endlich, wenn nur ein begrenzter Frequenzbereich betrachtet wird:<br />
[0034] Die Übertragungsfunktionen zwischen Leistungs- und Regelantrieb und der Masse ergeben sich <strong>aus</strong><br />
der Zahnriemenelastizität abhängig von der aktuellen Position. Die Zahnriemenelastizitäten, die Masse und die<br />
Dämpfung ergeben die Übertragungsfunktionen<br />
[0035] Die Elastizitäten sind von der aktuellen Position abhängig. Wird der Koordinatenursprung in die Mitte<br />
gelegt, ergibt sich für die Elastizitäten:<br />
4/13
DE 10 2007 062 738 A1 2009.04.02<br />
[0036] Damit ergibt sich die Verstärkung A zur vollständigen Elimination der Fehler des Leistungsantriebs zu<br />
[0037] D. h. die Verstärkung ist bei begrenztem Frequenzbereich endlich und kann ohne Stabilitätsprobleme<br />
erreicht werden. Die Anpassung an die aktuelle Position geschieht mit der ohnehin gemessenen Lage.<br />
[0038] Die Übertragungsfunktion G des <strong>Gesamtantrieb</strong>s ist dann:<br />
Vergleich mit Direktantriebslösung hinsichtlich Technik und Kosten<br />
[0039] Der Doppelantrieb – als Beispiel eines Antriebs mit <strong>mehreren</strong> "Antrieben" – hat in etwa das Verhalten<br />
als wenn die hohe Leistung von 65 kW über einen Direktantrieb ohne Getriebe auf den Zahnriemen übertragen<br />
würde.<br />
[0040] Hierbei wären z. B. folgende Komponenten als Direktantrieb erforderlich, vgl. Fig. 4. Der konventionelle<br />
Antrieb ist damit fast 4-mal so schwer wie der Doppelantrieb und hat eine 30% geringere Eigenfrequenz.<br />
[0041] In der Tabelle sind die Listenpreise (Bruttopreise) <strong>aus</strong> Preislisten für die Lösung mit Doppelantrieb und<br />
mit konventionellem Direktantrieb einander gegenüber gestellt, vgl. Fig. 5. In Summe ist der Doppelantrieb des<br />
Beispiels fast 50% günstiger als der konventionelle Antrieb.<br />
[0042] Der Doppelantrieb hat also folgende wesentlichen Vorteile:<br />
• geringere Kosten (im Beispiel fast 50% geringer)<br />
• geringeres Gewicht (im Beispiel 70% weniger)<br />
• höhere Eigenfrequenz (im Beispiel 40% höher)<br />
• Aufbau des Leistungspfades <strong>aus</strong> Komponenten des Standardprogramms<br />
[0043] Das hier am Beispiel eines Linearantriebs mit Zahnriemen vorgestellte Verfahren lässt sich auf unterschiedlichste<br />
mechatronische Antriebe anwenden:<br />
Anstatt<br />
– (neu).<br />
• Linearmotor<br />
– Linearantrieb mit Zahnriemen und zwei drehenden Antrieben<br />
• Linearmotor<br />
– Linearantrieb mit einem drehenden Motor und einem kleinen Linearmotor für den Regelantrieb<br />
• Direktantrieb<br />
– Antrieb mit Standardgetriebe<br />
• hochgenaues Robotergetriebe<br />
– Standardgetriebe<br />
[0044] In Summe entstehen Lösungen für genaue Antriebe <strong>aus</strong> kostengünstigen Standardkomponenten. Anwendungen<br />
sind z. B.<br />
5/13
DE 10 2007 062 738 A1 2009.04.02<br />
• Querschneider (Aufsynchronisieren auf die Bahngeschwindigkeit)<br />
• Druckmaschinen (Synchronlauf zu den Druckmarken)<br />
• Positionierantriebe für große Massen, z. B. Werkstückträger<br />
[0045] Der Doppelantrieb lässt sich auf mehr als zwei Antriebe entsprechend erweitern. "Zwei" ist ein Beispiel<br />
von "<strong>mehreren</strong> Antrieben", von denen auch einer bremsend sein kann, als direkte Bremse oder als bremsender<br />
Antrieb, insbesondere mit Bremschopper oder in der Form eines rückspeisenden elektrischen Antriebs mit<br />
Gleichspannungs-Zwischenkreis und Entropieerzeuger.<br />
Ausführungsbeispiele<br />
Antrieb mit Servoantrieb und Drehstromgetriebemotor<br />
a) Anwendungsbeispiel: Druckwalzen einer Druckmaschine mit Einzelantrieben<br />
b) Leistungsantrieb: Drehstrommotor am Netz mit spielbehaftetem Getriebe, Messung der Drehung am Getriebe<strong>aus</strong>gang,<br />
elastische Verbindung zur Arbeitsmaschine<br />
c) Regelantrieb: Servomotor ohne Getriebe, Ansteuerung mit Leistungselektronik mit Drehzahl und/oder<br />
Lageregelung, Messung der Drehung im Servomotor, elastische Verbindung zur Arbeitsmaschine<br />
d) Beschreibung: der Drehstromgetriebemotor wird am starren Netz betrieben. Dadurch stellt er kostengünstig<br />
eine hohe Leistung zur Verfügung. Allerdings ist die Drehzahl belastungsabhängig und die Bewegung<br />
ist zu den anderen Antrieben der Druckmaschine nicht synchronisiert. Der Regelantrieb vergleicht die<br />
Abweichung des Drehwinkels des Drehstromgetriebemotors am Getriebe<strong>aus</strong>gang mit dem Drehwinkelsollwert.<br />
Die Abweichung wird zur Ansteuerung des Servoantriebs benutzt, der den Drehwinkel korrigiert. Da<br />
zur Regelung das vom Winkelfehler des Getriebemotors beeinflusste Signal am Getriebe<strong>aus</strong>gang genommen<br />
wird, kann der Fehler des Drehstromgetriebemotors durch den Servomotor vollständig kompensiert<br />
werden.<br />
Antrieb mit Pneumatikzylinder und Servomotor<br />
a) Anwendungsbeispiel: Roboterarm<br />
b) Leistungantrieb. Pneumatikzylinder, wobei dessen Ventile vom Regelantrieb angesteuert werden. Der<br />
Pneumatikzylinder ist über die Nachgiebigkeit des Roboterarms elastisch mit dem Ende des Arms verbunden.<br />
Messung des Drehwinkels des Roboterarms.<br />
c) Regelantrieb: Permanentmagneterregter Synchron-Servomotor, Leistungselektronik mit Winkelregler,<br />
Drehwinkelmessung im Servomotor, elastische Verbindung des Servomotors über ein Gestänge mit dem<br />
Ende des Roboterarms. Die Pneumatikventile werden vom Motor angetrieben.<br />
d) Beschreibung: der Pneumatikzylinder stellt den größten Teil der Kraft oder Leistung zu Bewegung des<br />
Arms zur Verfügung. Da diese Bewegung nur ungenau ist, korrigiert der Servomotor die Bewegung. Der<br />
Drehwinkel des Roboterarms liefert dabei die fehlerbehaftete Bewegung durch den Zylinder zur Korrektur<br />
der Bewegung durch den Servoantrieb. Da die Ansteuerung des Pneumatikzylinders durch den Servomotor<br />
erfolgt, sind keine elektromagnetischen Ventile oder gar geregelte Ventile erforderlich. Der Servomotor verbessert<br />
dabei sowohl die Positioniergenauigkeit als auch die Reaktionsgeschwindigkeit z. B. auf Störgrößen.<br />
Antrieb <strong>aus</strong> Getriebemotor mit Frequenzumrichter und Servomotor als Direktantrieb ohne Getriebe<br />
a) Anwendungsbeispiel: Druckwalzenantrieb<br />
b) Leistungantrieb. Drehstromgetriebemotor mit Standardgetriebe und Frequenzumrichter, Messung des<br />
Drehwinkels am Getriebe<strong>aus</strong>gang, elastische Verbindung mit der Druckwalze<br />
c) Regelantrieb: Servomotor, Servoumrichter, Messung des Drehwinkels im Servomotor, elastische Verbindung<br />
mit der Druckwalze<br />
d) Beschreibung: Der Drehstromgetriebemotor mit Frequenzumrichter liefert kostengünstig die Leistung.<br />
Die Drehzahl kann dabei durch den Frequenzumrichter an die gewünschte Anlagengeschwindigkeit angepasst<br />
werden. Aufgrund des Verdrehspiels und des Übersetzungsfehlers des Standardgetriebes ist die Bewegung<br />
des Druckzylinders für ein gutes Druckergebnis nicht <strong>aus</strong>reichend. Der Servomotor greift hier ein,<br />
indem er die Bewegung des Drehstromgetriebemotors korrigiert. Da der Servomotor auch das dynamische<br />
Verhalten verbessert, kann die Druckwalze auch bei dynamischen Anforderungen nachgestellt werden und<br />
z. B. beim Mehrfarbdruck den Signalen der Passersteuerung folgen.<br />
6/13
DE 10 2007 062 738 A1 2009.04.02<br />
Patentansprüche<br />
1. Antriebseinrichtung für Bewegungen rotatorischer und/oder translatorischer Art, die Antriebseinrichtung<br />
aufweisend mehrere Antriebe (10, 20) zum gemeinsamen Antrieb einer Arbeitsmaschine oder zur Bewegung<br />
einer Masse und eine Steuereinrichtung dadurch gekennzeichnet, dass zumindest ein Antrieb zur Bereitstellung<br />
der Leistung (Leistungsantrieb) und zumindest ein Antrieb zur Steuerung oder Regelung der Genauigkeit<br />
und/oder Dynamik (Regelantrieb) vorgesehen sind und die Steuereinrichtung die zumindest zwei, insbesondere<br />
noch mehrere Antriebe ansteuert und regelt.<br />
2. Antrieb nach Anspruch 1, wobei die Antriebe elektrische Antriebe, pneumatische Antriebe, hydraulische<br />
Antriebe, Antriebe mit Verbrennungskraftmaschinen oder Strömungsmaschinen oder Kombinationen <strong>aus</strong> diesen<br />
Antrieben sind, insbesondere mit <strong>mechanisch</strong>em Getriebe, hydraulischem Getriebe oder einer Koppeleinheit<br />
<strong>aus</strong>gerüstet sind.<br />
3. Antrieb nach einem der vorhergehenden Ansprüche, wobei die Antriebe zumindest teilweise <strong>aus</strong> Elektromotoren<br />
bestehen, die jeweils von einer Leistungselektronik gespeist werden.<br />
4. Antrieb nach einem der vorhergehenden Ansprüche, wobei der zumindest ein Leistungsantrieb (10) ein<br />
Getriebemotor ist.<br />
5. Antrieb nach einem der vorhergehenden Ansprüche, wobei zumindest einer der Antriebe als Bremse<br />
<strong>aus</strong>gebildet ist, insbesondere ein Elektromotor mit einem auf einen Bremschopper speisenden Umrichter.<br />
6. Antrieb nach einem der vorhergehenden Ansprüche, wobei der zumindest eine Leistungsantrieb (10) ein<br />
Pneumatikzylinder oder Hydraulikzylinder ist.<br />
7. Antrieb nach einem der vorhergehenden Ansprüche, wobei der zumindest eine Regelantrieb (20) ein<br />
Elektromotor oder Elektrolinearmotor ist.<br />
8. Antrieb nach einem der vorhergehenden Ansprüche 3 bis 7, wobei der zumindest eine Antrieb mit Elektromotor<br />
zumindest teilweise mit Permanentmagnet <strong>aus</strong>gerüstet ist.<br />
9. Antrieb nach einem der vorhergehenden Ansprüche, wobei eine Umsetzung von rotatorischer Bewegungsart<br />
in eine lineare Bewegung durch ein Gestänge, Zahnstange, Zahnriemen oder Spindel vorhanden ist<br />
oder erfolgt.<br />
10. Antrieb nach einem der vorhergehenden Ansprüche, wobei die zumindest zwei Antriebe jeweils über<br />
ein elastisches Kuppelelement mit der Arbeitsmaschine oder der Masse gekoppelt sind.<br />
11. Antrieb nach einem der vorhergehenden Ansprüche, wobei ein oder mehrere Regelantriebe die Steuerung<br />
des zumindest einen Leistungsantrieb vornehmen, insbesondere indem zumindest ein Ventil <strong>mechanisch</strong><br />
durch einen der Regelantriebe betätigt wird, insbesondere eines Pneumatikantriebs.<br />
12. Antrieb nach einem der vorhergehenden Ansprüche, wobei an dem zumindest einen Leistungsantrieb<br />
(10) zumindest ein Sensor zur Messung der Bewegung des Leistungsantriebs vorhanden ist.<br />
13. Antrieb nach einem der vorhergehenden Ansprüche, wobei an dem zumindest einen Regelantrieb (20)<br />
ein Sensor zur Messung der Bewegung des Regelantriebs vorhanden ist.<br />
14. Antrieb nach einem der vorhergehenden Ansprüche, wobei eine Regeleinheit die Bewegung des (zumindest<br />
einen) Leistungsantriebs (10) <strong>aus</strong>wertet und zur Steuerung des (zumindest einen) Regelantriebs (20)<br />
verwendet.<br />
15. Antrieb nach einem der vorhergehenden Ansprüche 12 oder 13, wobei der Sensor zur Messung der<br />
Bewegung ein Tachogenerator, ein Resolver, ein Beschleunigungssensor, ein optischer Inkrementalgeber, ein<br />
magnetischer Inkrementalgeber, ein optischer Absolutwertgeber oder ein magnetischer Absolutwertgeber ist.<br />
16. Antrieb nach einem der vorhergehenden Ansprüche, wobei eine Regeleinheit die Bewegung des Regelantriebs<br />
<strong>aus</strong>wertet und den Regelantrieb (20) regelt.<br />
7/13
DE 10 2007 062 738 A1 2009.04.02<br />
17. Antrieb nach einem der vorhergehenden Ansprüche 16, wobei die Regeleinheit mit linearen und nichtlinearen<br />
Größen arbeitet.<br />
18. Antrieb nach einem der vorhergehenden Ansprüche ab 16, wobei die Regeleinheit einen Beobachter<br />
enthält.<br />
19. Antrieb nach einem der vorhergehenden Ansprüche ab 16, wobei die Regeleinheit einen Zustandsregler<br />
enthält.<br />
20. Antrieb nach einem der vorhergehenden Ansprüche ab 16, wobei die Parameter der Regeleinheit so<br />
gewählt sind, dass in einem festgelegten Frequenzbereich die Fehler des (zumindest einen) Leistungsantriebs<br />
nahezu vollständig kompensiert werden.<br />
21. Antrieb nach einem der vorhergehenden Ansprüche 16 bis 19, wobei die Parameter der Regeleinheit<br />
so gewählt sind, dass in einem gegebenen Frequenzbereich Fehler des (zumindest einen) Leistungsantriebs<br />
zumindest im wesentlichen kompensiert werden.<br />
22. Antrieb nach einem der vorhergehenden Ansprüche 1 bis 15, wobei die Regeleinheit den (zumindest<br />
einen) Leistungsantrieb und den (zumindest einen) Regelantrieb ansteuert.<br />
23. Antrieb nach einem der vorhergehenden Ansprüche, wobei der Leistungsantrieb und der Regelantrieb<br />
zu einer baulichen Einheit <strong>zusammen</strong>gefasst sind.<br />
24. Antrieb nach einem der vorhergehenden Ansprüche, wobei der Regelantrieb und die Regeleinrichtung<br />
zu einer baulichen Einheit <strong>zusammen</strong>gefasst sind.<br />
25. Antrieb nach einem der vorhergehenden Ansprüche, wobei die Leistungselektronik und die Regeleinheit<br />
zu einer Einheit <strong>zusammen</strong>gefasst sind.<br />
26. Antrieb nach einem der vorhergehenden Ansprüche 23 bis 25, wobei alle Komponenten zu einer baulichen<br />
Einheit <strong>zusammen</strong>gefasst sind.<br />
27. Antrieb nach einem der vorhergehenden Ansprüche, wobei der Regelantrieb (20) als Sollwert eine Differenz<br />
(V diff<br />
) <strong>aus</strong> dem Geschwindigkeitssollwert (v, ω) für den gesamten Antrieb und einem Istwert eines Gebers<br />
(TX) des Leistungsantriebs erhält, wobei diese Differenz so mit einem Faktor A multipliziert wird und dem<br />
Regelantrieb (20) als Sollwert vorgegeben wird, dass der Regelantrieb Fehler des Leistungsantriebs (10) vollständig<br />
kompensiert, zumindest im Wesentlichen.<br />
28. Antriebsverfahren für Bewegungen rotatorischer und/oder translatorischer Art, mit <strong>mehreren</strong> Antrieben<br />
(10, 20) zum gemeinsamen Antrieb einer Arbeitsmaschine oder zur Bewegung einer Masse und mit einer Steuereinrichtung<br />
(24); dadurch gekennzeichnet, dass zumindest ein Antrieb als Leistungsantrieb für die Bereitstellung<br />
der Leistung sorgt und zumindest ein Antrieb als Regelantrieb (20) zur Steuerung oder Regelung der Genauigkeit<br />
und/oder einer Dynamik des gemeinsamen Antriebs (10, 20) sorgt, und die Steuereinrichtung die zumindest<br />
zwei Antriebe (10, 20) ansteuert und regelt.<br />
29. Verfahren nach dem vorhergehenden Anspruch, wobei der Regelantrieb (20) als Sollwert eine Differenz<br />
(V diff<br />
) <strong>aus</strong> dem Geschwindigkeitssollwert (v, ω) für den gesamten Antrieb und einem Istwert eines Gebers<br />
(TX) des Leistungsantriebs erhält, wobei diese Differenz so mit einem Faktor A multipliziert wird und dem Regelantrieb<br />
(20) als Sollwert vorgegeben wird, dass der Regelantrieb Fehler des Leistungsantriebs (10) vollständig<br />
kompensiert, zumindest im Wesentlichen.<br />
30. Verfahren nach dem vorhergehenden Anspruch 28, wobei die Steuereinrichtung noch mehrer als zwei<br />
Antriebe des gemeinsamen Antriebs (10, 20) ansteuert und regelt.<br />
Es folgen 5 Blatt Zeichnungen<br />
8/13
DE 10 2007 062 738 A1 2009.04.02<br />
Anhängende Zeichnungen<br />
9/13
DE 10 2007 062 738 A1 2009.04.02<br />
10/13
DE 10 2007 062 738 A1 2009.04.02<br />
11/13
DE 10 2007 062 738 A1 2009.04.02<br />
12/13
DE 10 2007 062 738 A1 2009.04.02<br />
13/13