Kräfte am starren Körper
Kräfte am starren Körper
Kräfte am starren Körper

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
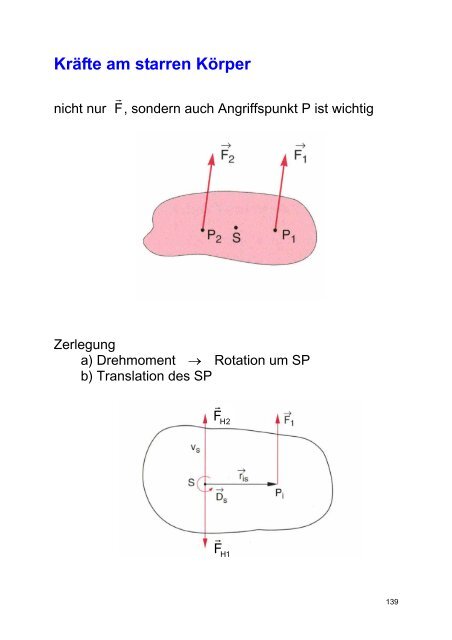
<strong>Kräfte</strong> <strong>am</strong> <strong>starren</strong> <strong>Körper</strong><br />
nicht nur F , sondern auch Angriffspunkt P ist wichtig<br />
Zerlegung<br />
a) Drehmoment → Rotation um SP<br />
b) Translation des SP<br />
F H2<br />
F <br />
H1<br />
139
keine Wirkung der beiden „Hilfskräfte“ ( FH,1 FH,2<br />
0)<br />
d.h. keine zus. Translation / Rotation<br />
+ = ,<br />
F<br />
und F bilden ein <strong>Kräfte</strong>paar<br />
1 H,1<br />
( is 1) ( is H,1)<br />
D =<br />
1<br />
r × F −<br />
1<br />
r × F<br />
2 2<br />
oder mit F1 = -FH,1<br />
( )<br />
D = r × F = D → Rotation um Achse durch SP<br />
is 1 S<br />
F<br />
= M a → Translation des <strong>Körper</strong>s<br />
H,2 S<br />
Ein ruhender <strong>Körper</strong> erfährt durch eine Kraft eine<br />
Translation seines Schwerpunktes S sowie eine Rotation<br />
um S<br />
140
Spezialfall: beliebige Kraft bei Fixierung einer<br />
r = r p,S<br />
raumfesten Drehachse durch den SP ( )<br />
( )<br />
D = r× F= r× F + F + F<br />
z n t<br />
D = r× Fz + r× Fn + r×<br />
Ft<br />
D = r× Fz<br />
≠ 0 aber unwirks<strong>am</strong> wg. Lagerung<br />
( F z<br />
= M a S<br />
: Translation durch<br />
Lagerung verhindert)<br />
D = r× Fn<br />
= 0 ( F n<br />
= M a S<br />
: aber Verschiebung durch<br />
Lagerung verhindert)<br />
D = r× Ft<br />
≠ 0 Drehung um Achse<br />
nur die Tangentialkomponente von F trägt zur Rotation<br />
bei<br />
141
Drehmomente durch die Schwerkraft<br />
Bei Lagerung im SP heben sich alle Drehmomente auf:<br />
∑ ∑<br />
D = ri× dFi = ri×<br />
g dm<br />
i<br />
i<br />
i<br />
∑→∫<br />
D<br />
=− g×∫<br />
r<br />
dm<br />
D =− g× Mr S<br />
= 0 da r = 0 S<br />
Bei der Lagerung im Schwerpunkt wirken durch die<br />
Schwerkraft keine Drehmomente (die Lage des <strong>Körper</strong>s<br />
ist stabil)<br />
142
Trägheitsmoment<br />
ausgedehnter <strong>Körper</strong>, der sich um eine feste Achse<br />
dreht<br />
∆E kin, i = ½ ∆m i v i<br />
2<br />
da v i = r i × ω i<br />
und r i = r i, z + r i, y + r i, x<br />
oder r i, y + r i, x = r i, ⊥ wird<br />
(r i, ⊥ Abstand von Drehachse)<br />
∆E kin, i = ½ ∆m i [(r i, z + r i, ⊥) × ω i ] 2<br />
da r i, z × ω i = 0 wird<br />
∆E kin, i = ½ ∆m i ⋅ r i, ⊥ 2 ⋅ ω i<br />
2<br />
oder für einen ausgedehnten <strong>Körper</strong><br />
E kin = E rot =<br />
lim ∑<br />
∆m→(½ 0 i ∆m i r i, ⊥ 2 2<br />
ω ) i<br />
i<br />
E rot = ½ ω 2 ∫ r 2 ⊥ ρ dV ω<br />
i<br />
=ω∀<br />
i<br />
I = ∫ r ⊥ 2 ρ dV = Trägheitsmoment<br />
E rot = = ½ ω 2 I<br />
I wird bestimmt durch die Abstandsverteilung der<br />
Massen um gegebene Drehachse<br />
143
Bsp.:<br />
Trägheitsmoment einer homogenen Kugel<br />
r = ⊥<br />
a = rsin ϑ<br />
I<br />
R π 2π<br />
2 2 2<br />
=ρ⋅ r sinϑ ⋅r sinϑdr dϕdϑ<br />
∫∫∫<br />
r= 0ϑ= 0ϕ=<br />
0<br />
R π 2π<br />
4 3<br />
=ρ⋅ r sinϑ dr dϕdϕ<br />
∫∫∫<br />
r= 0ϑ= 0ϕ=<br />
0<br />
π<br />
1 R<br />
5 2 sin<br />
3 d<br />
= ρ ⋅ π ϑ ϑ<br />
5<br />
∫<br />
0<br />
8<br />
15<br />
5<br />
= ρ⋅R<br />
⋅π<br />
M<br />
4<br />
= ρ⋅ π R<br />
3<br />
3<br />
=<br />
2 MR<br />
2<br />
5<br />
weitere Beispiele siehe Demtröder ab S. 142<br />
144
Zus<strong>am</strong>menfassung:<br />
Dyn<strong>am</strong>ik der Drehbewegung<br />
wird wesentlich bestimmt durch<br />
die Dichte-Verteilung der Masse<br />
gleiche Masse, verschiedene Masse-Verteilung<br />
⇒ verschiedenes Trägheitsmoment<br />
kinetische Energie bei Drehbewegung<br />
(bzw. Rollbewegung) darstellen durch<br />
Translation des Schwerpunktes<br />
und<br />
Rotation um Achse durch Schwerpunkt<br />
(hier: Trägheitsmoment wichtig)<br />
145
Drehimpuls ausgedehnter starrer <strong>Körper</strong><br />
für Massenpunkt gilt: L = m (r × v)<br />
also auch<br />
L i = ∆m i r i × v i<br />
L i = ∆m i r i × (ω i × r i )<br />
L i<br />
= ∆m 2<br />
i r ⊥<br />
⋅ω<br />
i<br />
i<br />
L =<br />
∑ L i<br />
=<br />
i<br />
∑ ∆m 2<br />
i ri<br />
⊥<br />
ω i = ω <br />
i<br />
∑ ∆m i<br />
i<br />
r<br />
2<br />
i⊥<br />
→<br />
lim<br />
∆m→0<br />
i<br />
L = ω ∫ r 2<br />
⊥<br />
ρ dV<br />
ρ∆V i<br />
L = I ω E rot = ½ ω 2 I = L 2 /2I<br />
===========================================<br />
Translation<br />
Rotation<br />
---------------------------------------------------------------------------<br />
Masse m<br />
Trägheitsmoment I<br />
Impuls p<br />
Kraft F<br />
Geschwindigkeit v<br />
Drehimpuls L<br />
Drehmoment D<br />
Winkelgeschwindigkeit ω<br />
Beschleunigung x Winkelbeschleunigung ϕ<br />
===========================================<br />
äquivalente Größen<br />
146
„Übersetzungen”<br />
E kin = ½ m v 2 E rot = ½ I ω 2<br />
p = m v L = r × p L = I ω<br />
F = m x D = r × F D = I ϕ<br />
Translation<br />
Rotation<br />
147
sei Drehmoment D = 0 ⇒ Drehimpuls L bleibt konstant<br />
Veränderung der Massenverteilung führt zu einer<br />
Veränderung des Trägheitsmomentes<br />
Bsp.:<br />
I 1<br />
r 1<br />
ω 1<br />
I<br />
r 2<br />
< I<br />
ω<br />
2<br />
> ω1<br />
2 1<br />
⇒ Veränderung von ω<br />
2 2<br />
E = ω I = L /2I<br />
=<br />
I 1<br />
2<br />
L<br />
4mr<br />
1<br />
rot 2<br />
2<br />
= m ⋅ r + m ⋅ r = 2mr<br />
2 2 2<br />
1 1 2 1 1<br />
I 2<br />
=<br />
2<br />
2mr 2<br />
148
Energiebilanz beim<br />
Drehstuhlversuch mit Hanteln<br />
E rot,1 = ½ I 1 ω 1<br />
2<br />
E rot,2 = ½ I 2 ω 2<br />
2<br />
hier angenommen: (I 1 / I 2 ) > 1<br />
I 1 = Kugel weit draußen, Drehung langs<strong>am</strong><br />
I 2 = Kugel innen, Drehung schnell<br />
Zus<strong>am</strong>menhang I i ←→ ω i gegeben durch<br />
Drehimpulserhaltung: L 1 = I 1 ω 1 = I 2 ω 2 = L 2<br />
ω 2 = (I 1 / I 2 ) ω 1<br />
E rot,2 = ½ I 2 ω 2 2 = ½ I 2 (I 1 / I 2 ) 2 ω 1<br />
2<br />
E rot,2 = ½ I 1 (I 1 / I 2 ) ω 1 2 = E rot,1 (I 1 / I 2 )<br />
da (I 1 / I 2 ) > 1 → E rot,2 > E rot,1<br />
?? wo kommt die Energie her ??<br />
149
Beim Heranziehen der Hanteln:<br />
Arbeit gegen Zentrifugalkraft verrichten<br />
r2 r2<br />
∫ zentrifugal ∫<br />
r<br />
r<br />
()<br />
2<br />
W =− F dr<br />
= mω<br />
r r dr<br />
1 1<br />
() ⎡I( ) I()<br />
2 2<br />
ω r = ω<br />
1⎣ r<br />
1<br />
/ r ⎤⎦ = ω ⎡<br />
1⎣ r<br />
1<br />
/r ⎤<br />
⎦<br />
(für Punktmassen)<br />
r<br />
2<br />
( ) ⎡ I ( )<br />
2 2 2<br />
W = mω1I<br />
r1<br />
∫ ⎣<br />
r/ r ⎤<br />
⎦<br />
dr<br />
I 2 ∝ r<br />
4<br />
r<br />
1<br />
r<br />
2 3 2 2<br />
( 1/m ) ∫<br />
⎡<br />
⎣<br />
1/r ⎤<br />
⎦<br />
dr ( 1/m ) ( 1/r )<br />
⇒ =<br />
( ) 2 ⎡I( ) ⎤( 2 2<br />
)<br />
W = I r ω ⎣ r /m⎦<br />
1/r −1/r<br />
1 2 1 1 1 2 1<br />
W = E ⎡<br />
rot,1 ⎣<br />
r<br />
1<br />
/mr1 ⎦<br />
r<br />
1<br />
/r2<br />
−1<br />
2 2 2<br />
I ( ) ⎤( )<br />
( I I )<br />
W = E / − 1 = ∆ E<br />
rot,1 1 2 rot,1<br />
r<br />
2 2<br />
1<br />
r<br />
1 2<br />
r<br />
1<br />
150
Steiner’scher Satz<br />
Verbindung von<br />
I B um beliebige Achse B mit<br />
I S des <strong>Körper</strong>s bezogen auf eine zu B parallele Achse<br />
durch den Schwerpunkt<br />
I B<br />
= ∫ r 2 dm<br />
∫<br />
I B = ( r + )<br />
I B<br />
S<br />
a 2 dm<br />
2<br />
2<br />
∫rS<br />
∫ ∫<br />
= dm + a dm + 2a r dm<br />
I S M 0<br />
S<br />
I B = I S + M a 2 (*)<br />
wenn Trägheitsmoment um Achse durch SP bekannt →<br />
Trägheitsmoment um beliebige dazu parallele Achse mit<br />
(*) bestimmbar<br />
151
152
Das Trägheitsmoment eines <strong>Körper</strong>s<br />
ist immer<br />
auf eine bestimmte Drehachse bezogen.<br />
gegebene Massenverteilung,<br />
verschiedene Drehachsen<br />
⇒ verschiedene Trägheitsmomente !!<br />
gegebene Drehachse,<br />
verschiedene Massenverteilung<br />
⇒ verschiedene Trägheitsmomente !!<br />
Trägheitsmoment I berechenbar ....<br />
.... wenn ρ (r) bekannt<br />
bei symmetrischen Massenverteilungen relativ leicht<br />
berechenbar<br />
falls Drehachse nicht durch Schwerpunkt geht:<br />
Steiner’schen Satz nutzen<br />
153
Bsp.:<br />
eines Stabes<br />
Rotation um eine senkrechte Achse b <strong>am</strong> Ende<br />
Lösung a) direkt<br />
I B<br />
L<br />
1 1<br />
=ρ⋅A⋅ ∫ x dx = ρ⋅A⋅ L = ML<br />
3 3<br />
0<br />
2 3 2<br />
Lösung b) mit Satz von Steiner<br />
I S eines rotierenden Stabes:<br />
1 ML<br />
2<br />
12<br />
I B = I S<br />
⎛L<br />
⎞<br />
+ M ⎜ 2 ⎟<br />
⎝ ⎠<br />
1 1 1<br />
= ML + ML = ML<br />
12 4 3<br />
2<br />
2 2 2<br />
154
Bsp. 2: Rollende Zylinder:<br />
D = I ϕ ( = I ω )<br />
mit Steinerschem Satz über Trägheitsmomente:<br />
M g r sin α = (I S + M r 2 ) ω<br />
Translationsbewegung des Schwerpunktes:<br />
a S = s = r ω = r<br />
M g r sinα<br />
g sinα<br />
=<br />
2 2<br />
( I + M r ) 1 + ( I / M r )<br />
S<br />
je größer das Trägkeitsmoment I S , desto geringer a S<br />
E pot (s) = E kin (s) + E rot (s) = M g s sin α<br />
1 2<br />
1<br />
Ekin<br />
( s) = Mvr<br />
, E I 2<br />
rot<br />
= ω<br />
2<br />
2<br />
1 2 1 2<br />
Mvr<br />
I Mg s sin<br />
2 + 2<br />
ω = ⋅ ⋅ α v<br />
ω=<br />
r<br />
r<br />
2 2 I<br />
vr + vr ⋅ = g⋅s⋅sinα<br />
2<br />
Mr<br />
S<br />
⇒<br />
v<br />
2gs sinα<br />
=<br />
1 + ( I / M r )<br />
2<br />
r 2<br />
S<br />
(rollend)<br />
gleitend: M g s sin α = ½ M v 2<br />
→<br />
v = 2 g s sinα><br />
v<br />
2 2<br />
g<br />
r<br />
155
Bewegungsgleichung der Rotation<br />
L i = r i, ⊥ × p i = ∆m i (r i, ⊥ × v i ) = ∆m i r i, ⊥ 2 ω <br />
L<br />
i<br />
= ∆m i (r i, ⊥ × v<br />
i) = r i, ⊥ × F i,t = D i, ∥<br />
D i, ∥ = ∆m i r i, ⊥ 2<br />
ω<br />
D ∥ = (∑ ∆m i r i, ⊥ 2 ) ω = ω ∫r ⊥<br />
2<br />
dm = ω I<br />
D ∥ = I ϕ vergleiche F = m r<br />
für D ∥ = const.<br />
ϕ(t) = ½ (D/I) t 2 + ω o t + ϕ o<br />
Bewegungsgleichung (Winkelkoordinate)<br />
156
Experimentelle Bestimmung des<br />
Trägheitsmomentes eines <strong>Körper</strong>s<br />
Rückstelldrehmoment proportional zu ϕ<br />
D = - D r ϕ D r = „Richtmoment“<br />
Bewegungsgleichung: I<br />
o<br />
<br />
ϕ = − D ϕ ma = F<br />
<br />
I o = Trägheitsmoment des Drehtisches<br />
r<br />
D r<br />
I O<br />
ϕ =+ ϕ =0<br />
Lösung der Schwingungsgleichung:<br />
( t )<br />
ϕ=ϕ sin ω , r<br />
max I O<br />
D<br />
ω= harmonische Schwingung<br />
2π<br />
Schwingungsdauer T = = I<br />
ω<br />
/ D<br />
o o r<br />
157
Zusatzmasse mit bekanntem I A (M,R M )<br />
T 1 = 2 π ( I + I ) / D<br />
o A r<br />
T 1 2 – T o 2 = (2 π ) 2 [ (I o + I A ) / D r - I o / D r ]<br />
T 1 2 – T o 2 = (2 π ) 2<br />
I A / D r<br />
⇒ Messung von T 1 und T o liefert D r<br />
⇒ T o liefert I o<br />
158
Beziehung zwischen der momentanen Winkelgeschwindigkeit<br />
ω und dem Drehimpuls L <br />
es gilt: im Allgemeinen muss der Drehimpuls L <br />
eines<br />
beliebig <strong>starren</strong> <strong>Körper</strong>s nicht parallel zur<br />
momentanen Drehachse, d.h. parallel zu ω <br />
sein!<br />
Der Zus<strong>am</strong>menhang zwischen den Vektoren ω <br />
und L ist bestimmt durch die Massenverteilung<br />
im <strong>starren</strong> <strong>Körper</strong><br />
Ziel: allgemeine Aussagen über Trägheitsmomente<br />
eines gegebenen <strong>Körper</strong>s<br />
es gibt „beliebig viele“ Drehachsen!<br />
→ ?? → beliebig viele (unabhängige)<br />
Trägheitsmomente?<br />
(durch Steiner’schen Satz reduzierbar auf beliebige<br />
Achse durch den Schwerpunkt)<br />
Ergebnis:<br />
Problem ist reduzierbar auf Trägheitsmoment für<br />
Drehung um drei ausgezeichnete Achsen:<br />
Hauptträgheitsachsen<br />
mit<br />
Hauptträgheitsmomenten<br />
159
Das Ziel: Verstehen der<br />
„Hauptachsen“ für Trägheitsmomente<br />
beliebig geformter <strong>Körper</strong><br />
Achse ˆω durch den Schwerpunkt<br />
Trägheitsmoment hängt ab<br />
von Richtung ˆω der Achse<br />
Ergebnis:<br />
Es gibt eine Achse ˆω, bzgl. derer das<br />
Trägheitsmoment MAXIMAL wird: I max<br />
( ˆω<br />
max<br />
)<br />
Es gibt eine Achse ˆω, bzgl. derer das<br />
Trägheitsmoment MINIMAL wird: I min<br />
( ˆω<br />
min<br />
)<br />
wobei<br />
ˆ<br />
ˆ<br />
min max<br />
ω ⊥ ω<br />
für die Drehung um die Achse<br />
inter min max<br />
ω ˆ = ω ˆ ×ω ˆ gilt<br />
( ωˆ ) ≤ ( ωˆ ) ≤ ( ωˆ<br />
)<br />
I I I<br />
inter min inter int er max max<br />
160
Vektorbeziehung<br />
D = A × B × C = A × ( B × C )<br />
Aussage über D ?<br />
B ⊥ B × C<br />
C ⊥ B × C<br />
D ⊥ B × C<br />
D ⊥ A<br />
daher muss D in der von B und C aufgespannten<br />
Ebene liegen<br />
→<br />
D = λ B B + λ C C<br />
Rechnung zeigt:<br />
A × B × C = (A ⋅ C) B - (A ⋅ B) C<br />
161
für jedes Massenelement<br />
∆ mi<br />
gilt:<br />
A B C<br />
<br />
L i = ∆m i ( r i × v <br />
i<br />
) = ∆m i ( r i × (ω × r i ))<br />
Umformung mit Vektorrelation:<br />
L i = ∆m i (r 2 i ω <br />
- ( r i<br />
ω) r i ) →<br />
∫<br />
( ÷ )dm<br />
also für <strong>Körper</strong> insges<strong>am</strong>t gilt:<br />
L = ∫ (r 2 ω - (r ω ) r ) ρ dV ρ =ρ( r<br />
)<br />
<br />
r ⋅ω<br />
L x = ∫[ r 2 ω x - (x ω x +y ω y +z ω z ) x ] ρ dV<br />
Beim <strong>starren</strong> <strong>Körper</strong> hängt ω nicht vom Ort ab, d.h. die<br />
Komponenten von ω dürfen vor die Integrale genommen<br />
werden.<br />
L x = ω x ∫ (r 2 - x 2 ) ρ dV - ω y ∫xy ρ dV - ω z ∫xz ρ dV<br />
y<br />
+ z<br />
2 2<br />
L x = I xx ω x + I xy ω y + I xz ω z<br />
162
wobei:<br />
I xx = ∫(r 2 - x 2 ) ρ dV<br />
I xy = - ∫xy ρ dV<br />
I xz = - ∫xz ρ dV<br />
= I yx<br />
= I zx<br />
entsprechend ergibt sich<br />
I yy = ∫(r 2 - y 2 ) ρ dV<br />
I zz = ∫(r 2 - z 2 ) ρ dV<br />
I yz = - ∫yz ρ dV<br />
= I zy<br />
L y = I yx ω x + I yy ω y + I yz ω z<br />
L z = I zx ω x + I zy ω y + I zz ω z<br />
163
L = (L x , L y, L z )<br />
L x = I xx ω x + I xy ω y + I xz ω z<br />
L y = I yx ω x + I yy ω y + I yz ω z<br />
L z = I zx ω x + I zy ω y + I zz ω z<br />
L x I xx I xy I xz ω x<br />
L y = I yx I yy I yz ⋅ ω y<br />
L z I zx I zy I zz ω z<br />
L = I ω <br />
I = Trägheitstensor<br />
(symbolische Schreibweise für 3 Gleichungen)<br />
164