Prospekt Aktivlenkung - ZF Lenksysteme
Prospekt Aktivlenkung - ZF Lenksysteme
Prospekt Aktivlenkung - ZF Lenksysteme

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
lenkung bietet Potenziale für<br />
zukünftige Lenkfunktionalitäten.<br />
Ihre Vernetzung ermöglicht es,<br />
sowohl den wirksamen Lenkwinkel<br />
als auch das Lenkmoment<br />
einer Lenkbewegung frei zu<br />
gestalten. Mit diesen funktionalen<br />
Freiheitsgraden lassen sich<br />
Steer by Wire-Funktionalitäten<br />
realisieren ohne die durchgehend<br />
mechanische Verbindung<br />
zwischen dem Lenkrad und den<br />
gelenkten Rädern auftrennen zu<br />
müssen. Auf Grund dieser Möglichkeiten<br />
sowie der hohen Akzeptanz<br />
beim Endkunden wird sich<br />
die <strong>ZF</strong>-<strong>Aktivlenkung</strong> in der Breite<br />
weiter durchsetzen.<br />
Wie jede Entwicklung von <strong>ZF</strong><br />
<strong>Lenksysteme</strong> muss auch die <strong>ZF</strong>-<br />
<strong>Aktivlenkung</strong> mit den Zielen der<br />
Fahrzeughersteller übereinstimmen<br />
und diese unterstützen. So<br />
gibt es bereits heute in der Automobilindustrie<br />
die Vision des<br />
komplett integrierten Chassismanagements.<br />
Ein übergeordnetes<br />
Steuergerät erkennt kritische<br />
Fahrzustände und aktiviert die<br />
jeweiligen Teilsysteme wie ESP,<br />
<strong>ZF</strong>-<strong>Aktivlenkung</strong>, Hinterachslenkung<br />
oder die aktive Wankstabilisierung,<br />
um den bestmöglichen<br />
Beitrag für ein sicheres<br />
Fahrverhalten zu leisten. Diese<br />
Vernetzungsmöglichkeiten zeigen<br />
die Potenziale für die herstellerindividuelle<br />
Zusammenstellung<br />
von Fahrwerkregelsystemen.<br />
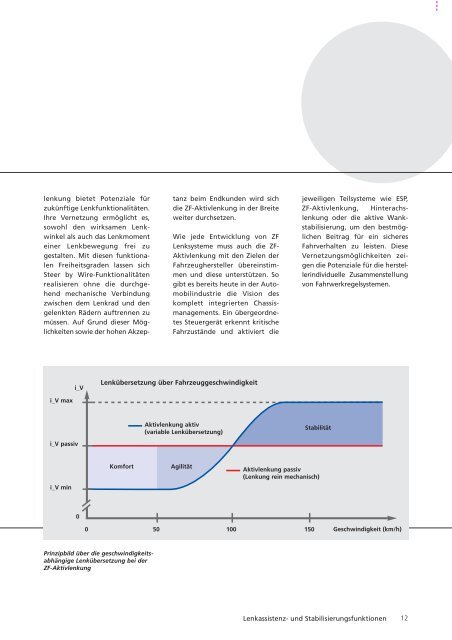
i_V<br />
Lenkübersetzung über Fahrzeuggeschwindigkeit<br />
i_V max<br />
<strong>Aktivlenkung</strong> aktiv<br />
(variable Lenkübersetzung)<br />
Stabilität<br />
i_V passiv<br />
Komfort<br />
Agilität<br />
<strong>Aktivlenkung</strong> passiv<br />
(Lenkung rein mechanisch)<br />
i_V min<br />
0<br />
0<br />
50<br />
100 150<br />
Geschwindigkeit (km/h)<br />
Prinzipbild über die geschwindigkeitsabhängige<br />
Lenkübersetzung bei der<br />
<strong>ZF</strong>-<strong>Aktivlenkung</strong><br />
Lenkassistenz- und Stabilisierungsfunktionen<br />
12