4. Gleichstrommaschinen - FB E+I: Home
4. Gleichstrommaschinen - FB E+I: Home
4. Gleichstrommaschinen - FB E+I: Home

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Im Betrieb der Gleichstrommaschine treten das Erreger- und das Ankerquerfeld gleichzeitig auf,<br />
wobei wegen der magnetischen Sättigung das resultierende Gesamtfeld nicht mit der Addition der<br />
zwei Teilfelder übereinstimmt. Man bezeichnet die Beeinflussung der Luftspaltinduktion durch<br />
die Ankerdurchflutung als Ankerrückwirkung.<br />
Die Ankerrückwirkung verzerrt das Hauptfeld, so dass unter einer Polhälfte eine höhere Luftspaltinduktion<br />
entsteht (B max > B L ). Infolge der magnetischen Sättigung wird das Feld der einen<br />
Polhälfte weniger verstärkt als in der anderen geschwächt. Der Fluss ist damit kleiner als bei<br />
Leerlauf (Φ < Φ 0 ). Die neutrale Zone mit B = 0 wird aus der Mitte der Pollücke verschoben.<br />
Besteht innerhalb der Polteilung die mittlere Luftspaltinduktion B m , so wird in jeder Windung der<br />
Ankerwicklung eine mittlere Spannung (<strong>4.</strong>10) induziert.<br />
U<br />
qw<br />
= 2 ⋅ B ⋅ l ⋅ v<br />
(<strong>4.</strong>10)<br />
m<br />
Zwischen benachbarten Bürsten stehen für die Spannungsbildung w Windungen zur Verfügung,<br />
so dass sich die induzierte Ankerspannung einer Gleichstrommaschine wie folgt berechnet.<br />
zA<br />
Uq = w ⋅ Uqw<br />
= 4 ⋅ w ⋅ p ⋅ n ⋅ Φ = ⋅ p ⋅ n ⋅ Φ<br />
(<strong>4.</strong>11)<br />
a<br />
Eine wichtige Größe für den Betrieb der Gleichstrommaschine ist die Lamellenspannung U s , auch<br />
Steg- oder Segmentspannung genannt, die zwischen benachbarten Stromwenderlamellen auftritt.<br />
Der Mittelwert lässt sich einfach aus der Klemmenspannung U A des Ankers geteilt durch die<br />
Lamellenzahl pro Polteilung berechnen.<br />
UA<br />
⋅ 2 ⋅ p 2 ⋅ ws<br />
⋅ p<br />
Us<br />
= = ⋅ Bm<br />
⋅ l ⋅ v<br />
(<strong>4.</strong>12)<br />
k a<br />
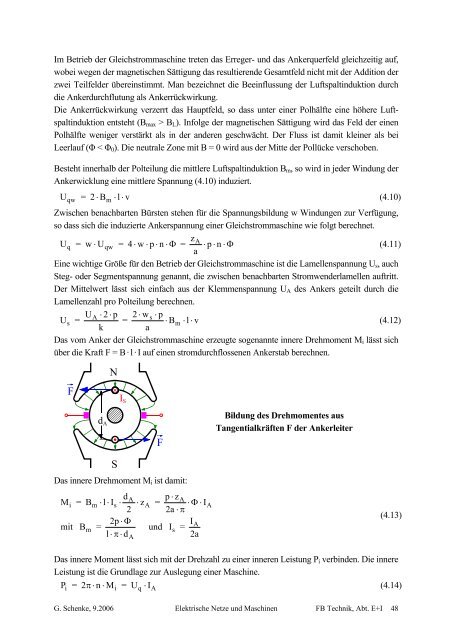
Das vom Anker der Gleichstrommaschine erzeugte sogenannte innere Drehmoment M i lässt sich<br />
über die Kraft F = B · l · I auf einen stromdurchflossenen Ankerstab berechnen.<br />
F<br />
N<br />
I S<br />
d A<br />
F<br />
Bildung des Drehmomentes aus<br />
Tangentialkräften F der Ankerleiter<br />
S<br />
Das innere Drehmoment M i ist damit:<br />
dA<br />
Mi<br />
= Bm<br />
⋅ l ⋅ Is<br />
⋅<br />
2<br />
2p ⋅ Φ<br />
mit Bm<br />
=<br />
l ⋅ π ⋅ d<br />
A<br />
⋅ z<br />
A<br />
=<br />
und<br />
p ⋅ zA<br />
⋅ Φ ⋅<br />
2a ⋅ π<br />
IA<br />
Is<br />
=<br />
2a<br />
I<br />
A<br />
(<strong>4.</strong>13)<br />
Das innere Moment lässt sich mit der Drehzahl zu einer inneren Leistung P i verbinden. Die innere<br />
Leistung ist die Grundlage zur Auslegung einer Maschine.<br />
P<br />
i<br />
= 2π ⋅ n ⋅ M = U ⋅ I<br />
(<strong>4.</strong>14)<br />
i<br />
q<br />
A<br />
G. Schenke, 9.2006 Elektrische Netze und Maschinen <strong>FB</strong> Technik, Abt. <strong>E+I</strong> 48