- Seite 2 und 3:
Füllstandmessung mit Radar Leitfad
- Seite 4 und 5:
Aufgrund der Verschiedenheit und Ko
- Seite 6 und 7:
Für die Füllstandmessung hat die
- Seite 8 und 9:
1. Geschichte des Radars James Cler
- Seite 10 und 11:
Bild 1.5 - I.W.M.: Sir Robert Watso
- Seite 12 und 13:
eindringenden Flugzeugen, einem Wü
- Seite 14 und 15:
Im späten Februar 1940 gelang John
- Seite 16 und 17:
Der Planet Venus ist, von der Erde
- Seite 18 und 19:
Vergleich: Früher - Heute Bild 1.1
- Seite 20 und 21:
2. Physikalische Grundlagen Die Lic
- Seite 22 und 23:
2. Physikalische Grundlagen des Rad
- Seite 24 und 25:
2. Physikalische Grundlagen des Rad
- Seite 26 und 27:
2. Physikalische Grundlagen des Rad
- Seite 28 und 29:
2. Physikalische Grundlagen des Rad
- Seite 30 und 31:
2. Physikalische Grundlagen des Rad
- Seite 32 und 33:
2. Physikalische Grundlagen des Rad
- Seite 34 und 35:
2. Physikalische Grundlagen des Rad
- Seite 36 und 37:
2. Physikalische Grundlagen des Rad
- Seite 38 und 39:
2. Physikalische Grundlagen des Rad
- Seite 40 und 41:
1a. CW, Dauerstrichradar Beim Dauer
- Seite 42 und 43:
Reflektor reflektiertes Signal (fre
- Seite 44 und 45:
In der Praxis muss das FMCW- Signal
- Seite 46 und 47:
3. Pulsradar a. Einfaches Pulsradar
- Seite 48 und 49:
Puls-Doppler-Radar f t + f dp f t R
- Seite 50 und 51:
Jeder Puls eines Chirp-Radars hat e
- Seite 52 und 53:
4. Radar-Füllstandmessung Die Vort
- Seite 54 und 55:
spannungsgesteuerter Oszillator f (
- Seite 56 und 57:
f 2 f 1 fd1 , -f d2 , -fd3 , -fd4 ,
- Seite 58 und 59:
Frequenzspektrum der Echos Jedes Ec
- Seite 60 und 61:
Um dieses Prinzip zu veranschaulich
- Seite 62 und 63:
Sampling mit Pikosekunden Sendepuls
- Seite 64 und 65:
Pulsechos in einem Behälter sind z
- Seite 66 und 67:
Radar-Blockschaltbild (Abb. 4.11) D
- Seite 68 und 69:
Je höher die Frequenz eines Radar-
- Seite 70 und 71:
Radarsender mit hoher Frequenz sind
- Seite 72 und 73:
Signalamplitude Signalamplitude 4.
- Seite 74 und 75:
kürzerer Puls bessere Auflösung A
- Seite 76 und 77:
Amplitude Aus Gleichung 4.3 wird er
- Seite 78 und 79:
Hochgenaues Radar Im Allgemeinen is
- Seite 80 und 81:
Gepulstes FMCW-Radar Der niedrige L
- Seite 82 und 83:
Die Antenne eines Radar- Füllstand
- Seite 84 und 85:
Das Maß, wie effektiv die Antenne
- Seite 86 und 87:
1. Hornantennen Die metallische Hor
- Seite 88 und 89:
Hornantenne Ausführung 2 Abb. 5.6:
- Seite 90 und 91:
Hornantenne Ausführung 3 Abb. 5.8:
- Seite 92 und 93:
Abb. 5.10: Schnittbild einer Kerami
- Seite 94 und 95: . Hornantenne mit Rohrverlängerung
- Seite 96 und 97: Abb. 5.16: Hornantennen-Ausführung
- Seite 98 und 99: Abb. 5.17: Dielektrische Stabantenn
- Seite 100 und 101: Stabantenne-Ausführung 2 Abb. 5.19
- Seite 102 und 103: Stabantennen-Ausführung 3 Abb. 5.2
- Seite 104 und 105: Stabantennen-Ausführung 4 Diese St
- Seite 106 und 107: 3. Standrohrantennen Für allgemein
- Seite 108 und 109: Standrohrantenne Typ 2: Stabantenne
- Seite 110 und 111: Mikrowellen breiten sich innerhalb
- Seite 112 und 113: Parabolantennen werden hauptsächli
- Seite 114 und 115: Die Mikrowellen gelangen über ein
- Seite 116 und 117: Max.: 15,4 dB 180 150 150 120 120 m
- Seite 118 und 119: 3. Frequenzabhängigkeit des Öffnu
- Seite 120 und 121: Mechanischer Einbau Der richtige Ei
- Seite 122 und 123: 2. Flüssigkeitsanwendungen - Staba
- Seite 124 und 125: Stabantenne direkt auf dem Behälte
- Seite 126 und 127: Störechos Ebene Flächen, Einbaute
- Seite 128 und 129: Behältereinbauten Einbauten wie z.
- Seite 130 und 131: Ausrichtung des Radargerätes bei F
- Seite 132 und 133: 4. Standrohre und Bypassrohre Radar
- Seite 134 und 135: Polarisation Laufzeitänderung der
- Seite 136 und 137: Konstruktionsrichtlinien für Stand
- Seite 138 und 139: Diagramm 2 Abb. 6.27 100% Verbindun
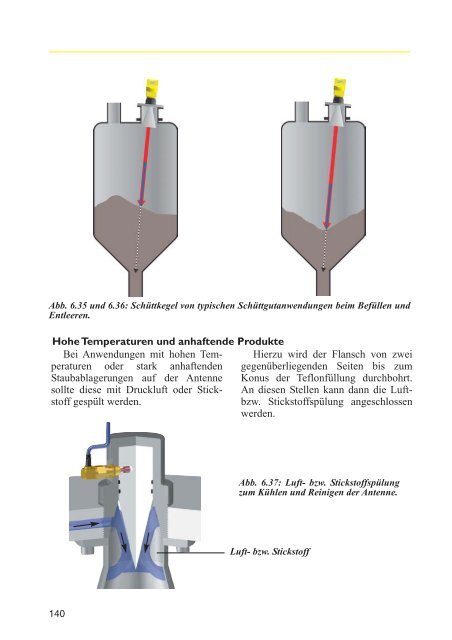
- Seite 140 und 141: Reflexionen an der Behälterwand Wi
- Seite 142 und 143: Dimensionierung des dielektrischen
- Seite 146 und 147: B. Elektrische Anschlussvarianten I
- Seite 148 und 149: e. Feldbus (Profibus PA) max. 32 Se
- Seite 150 und 151: c. Vierleiter, EEx d ia Versorgung
- Seite 152 und 153: g. Feldbus (VBUS) - max. 15 Sensore
- Seite 154: i. Feldbus (Profibus PA) - Ex ia ei