1 Einleitung - Institut für Robotik und Prozessinformatik
1 Einleitung - Institut für Robotik und Prozessinformatik
1 Einleitung - Institut für Robotik und Prozessinformatik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
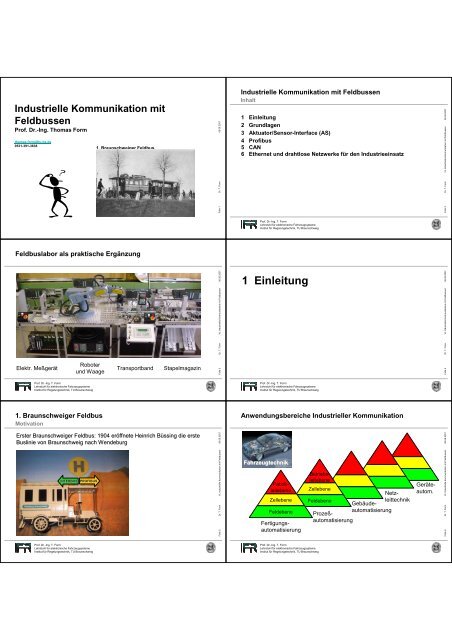
Industrielle Kommunikation mit<br />
Feldbussen<br />
Prof. Dr.-Ing. Thomas Form<br />
thomas.form@tu-bs.de<br />
0531-391-3838<br />
ELEKTRIK / ELEKTRONIK ENTWICKLUNG<br />
1. Braunschweiger Feldbus<br />
Feldbuslabor als praktische Ergänzung<br />
Elektr. Meßgerät<br />
Roboter<br />
<strong>und</strong> Waage<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
1. Braunschweiger Feldbus<br />
Motivation<br />
Transportband<br />
Stapelmagazin<br />
Erster Braunschweiger Feldbus: 1904 eröffnete Heinrich Büssing die erste<br />
Buslinie von Braunschweig nach Wendeburg<br />
INTERBUS<br />
PROFIBUS<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 1 Dr. T. Form 06.06.2007<br />
Folie 3 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 5 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Industrielle Kommunikation mit Feldbussen<br />
Inhalt<br />
1 <strong>Einleitung</strong><br />
2 Gr<strong>und</strong>lagen<br />
3 Aktuator/Sensor-Interface (AS)<br />
4 Profibus<br />
5 CAN<br />
6 Ethernet <strong>und</strong> drahtlose Netzwerke <strong>für</strong> den Industrieeinsatz<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
1 <strong>Einleitung</strong><br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Anwendungsbereiche Industrieller Kommunikation<br />
Fahrzeugtechnik<br />
Fabrikleitebene<br />
Zellebene<br />
Feldebene<br />
Fertigungsautomatisierung<br />
Betriebsleitebene<br />
Zellebene<br />
Feldebene<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Prozeßautomatisierung<br />
Gebäudeautomatisierung<br />
Netzleittechnik<br />
Geräteautom.<br />
Folie 2 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 4 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 6 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Fertigungsautomatisierung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 7 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Prozessautomatisierung:<br />
Petrochemische Anlage<br />
Steuerungen <strong>für</strong><br />
06.06.2007<br />
• Werkzeugmaschinen<br />
Feldbussen<br />
• Transporteinrichtungen<br />
mit<br />
• Roboter<br />
Kommunikation<br />
• Antriebsregelung<br />
Industrielle VL Form T. Dr.<br />
Ferndiagnose <strong>und</strong> -wartung wartung über das Internet<br />
Einsatz von Industrie-PCs Industrie PCs <strong>und</strong> speicherprogrammierbaren Steuerungen<br />
8<br />
(SPS) Folie<br />
Wichtige Sensoren in der Verfahrenstechnik<br />
Durchfluss-<br />
Sensor<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Temperatur-/<br />
Druck- Sensor<br />
Füllstands-Sensoren<br />
Schwimmer, Ultraschall<br />
Datenkommunikation im Kraftfahrzeug<br />
Historische Entwicklung der Netzwerkumfänge<br />
Anzahl vernetzter Steuergeräte<br />
50<br />
45<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
8er<br />
Mercedes-Benz<br />
BMW<br />
Audi<br />
VW<br />
S-Klasse<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
7er<br />
Passat 5<br />
5er<br />
C-Klasse<br />
E-Klasse<br />
S-Klasse<br />
Golf 4 MP<br />
Leitfähigkeit-<br />
Sensor<br />
88 89 90 91 92 93 94 95 96 97 98 99 0 1 2 3<br />
Jahr<br />
A6<br />
7er<br />
C-Klasse<br />
3er<br />
A2<br />
A4<br />
Phaeton<br />
Quelle: Dr. M. Daginnus, VW<br />
A8<br />
Quelle: Prof. Leohold, U Kassel<br />
Folie 9 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 11 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Gebäudeleittechnik<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Betriebstechnik<br />
Leitebene TU-BS TU BS<br />
Areal<br />
Gebäudekomplex<br />
PROFIBUS<br />
Gebäudeebene<br />
Sensor-Aktor-Ebene<br />
Modem<br />
Leitrechner (PC)<br />
Unterstationen (SPS)<br />
Hochhaus BS8<br />
Elektrotechnik<br />
Temperaturregelung, Klimaregelung, Einzelraumregler,<br />
Präsenskontrolle, Lichtregelung, Jalousiesteuerung<br />
Datenkommunikation im Kraftfahrzeug<br />
Klassifikation von Fahrzeug-Netzwerken nach Übertragungsrate/Kosten<br />
Datenrate/(Bit/s)<br />
25M<br />
10M<br />
1M<br />
125K<br />
20K<br />
embedded control multi media<br />
CAN High-Speed<br />
CSMA/CD<br />
Zweidraht<br />
CAN Low-Speed<br />
CSMA/CD<br />
fehlertolerant,<br />
Zweidraht<br />
LIN<br />
time triggered<br />
Master/Slave<br />
J1850<br />
Eindraht, o. Quarz<br />
FlexRay, TTP<br />
TDMA<br />
fehlertolerant<br />
2x2Draht/optisch<br />
D2B, MOST<br />
Optischer Ring<br />
Bluetooth<br />
drahtlos<br />
0.5 1 2.5<br />
5<br />
Relative Kosten pro Knoten<br />
Klassifizierung nach:<br />
SAE ISO<br />
Klasse D<br />
1-10 MBit/s<br />
Infotainment<br />
Klasse C<br />
250-1000 kBit/s<br />
Echtzeitkritische<br />
Anwendungen<br />
spez. Aggregate<br />
Klasse B<br />
bis 100kBit/s<br />
Instrumentierung<br />
Klasse A<br />
bis 10kBit/s<br />
Karosserie<br />
High speed<br />
> 125 kBit/s<br />
Low speed<br />
≤ 125 kBit/s<br />
009-01<br />
Folie 10 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 12 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Datenkommunikation im Kraftfahrzeug<br />
Netzwerkstrukturen der Zukunft<br />
Sicherheitskritische<br />
System<br />
FlexRay<br />
≥10 MBit/s<br />
Antriebsstrang<br />
<strong>und</strong> Fahrwerk-<br />
Regelung<br />
CAN 500kBit/s<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
gateway<br />
Sensor/Aktor<br />
Subsysteme<br />
LIN 20kBit/s<br />
Komfort <strong>und</strong><br />
Bordnetzsysteme<br />
CAN 125kBit/s<br />
Vertikale Gliederung industrieller Prozesse<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Produktplanung<br />
Adaption der<br />
Produktionsmittel<br />
Diagnose<br />
Software<br />
download<br />
Multimedia<br />
?? > 23MBit/s<br />
Störeinflüsse Zeitanforderungen<br />
Material<br />
Markt<br />
Störungen der<br />
Automatisierungsgeräte<br />
oder Übertragungswege<br />
Material,<br />
Umgebungsbedingungen,<br />
defekte Sensoren<br />
oder Aktoren<br />
Prozessführung<br />
Prozessoptimierung<br />
Steuerung<br />
Regelung<br />
Überwachung<br />
Diagnose<br />
Prozess<br />
Feldebene<br />
Langzeitbereich<br />
St<strong>und</strong>en.... Wochen<br />
mittlerer Zeitbereich<br />
Minuten....St<strong>und</strong>en<br />
Quelle: Prof. Leohold, U Kassel<br />
Kurzzeitbereich<br />
Millisek<strong>und</strong>en.... Minuten<br />
Dezentral organisiertes Automatisierungssystem<br />
Leitebene<br />
(Systemebene)<br />
Zellebene<br />
(Prozeßebene)<br />
Feldebene<br />
Feldgeräte<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Betriebsleitsystem<br />
CNC<br />
SPS<br />
M<br />
E/A Sensor Antrieb<br />
Feldgeräte<br />
Meßumformer<br />
TCP/IP Backbone<br />
Transmission Control Protocol/<br />
Internet Protocol<br />
Folie 13 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 15 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 17 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Horizontale Gliederung industrieller Prozesse<br />
Teilprozess n-1 Teilprozess n Teilprozess n+1<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
bidirektionaler Informationsfluß<br />
Eingangsgröße Material- <strong>und</strong>/oder Energiefluss Ausgangsgröße<br />
2 Gr<strong>und</strong>lagen<br />
- Kommunikationsmodell<br />
- Zugriffsverfahren<br />
- Topologie<br />
- Hardware<br />
- Software<br />
- Datensicherheit<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Anwendungsbereiche Industrieller Kommunikation<br />
Vernetzungshierachie in der Automatisierungstechnik<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Quelle: Siemens AG<br />
Folie 14 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 16 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 18 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Aufgabenbereiche <strong>und</strong> Anforderungen an die<br />
Kommunikation in der Fertigungsautomatisierung<br />
Feldgeräte<br />
Fabrikleitebene:<br />
CNC<br />
SPS<br />
E/A Sensor Antrieb<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
M<br />
Konstruktion, Auftragsverwaltung,<br />
Produktionsplanung <strong>und</strong> –steuerung (PPS),<br />
Bestandsführung, Nachdisposition,<br />
Istdatenauswertung, Statistik, Archivierung.<br />
Fertigungsleitebene: Steuerung von Fertigungszellen,<br />
Anlagenvisualisierung, Bedienung & Beobachtung,<br />
Stammdatenverwaltung, Datenarchivierung,<br />
Kopplung zu den über- <strong>und</strong> unterlagerten Ebenen.<br />
Feldgeräte<br />
Meßumformer<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Feldebene: Erfassen von analogen <strong>und</strong><br />
digitalen Signalen, Datenvorverarbeitung<br />
in den E/A-Komponenten, Steuerung <strong>und</strong><br />
Regelung von Teilprozessen,<br />
Verteilung der Daten über<br />
systeminterne Feldbusse.<br />
.<br />
Kommunikation im ISO/OSI-Referenzmodell<br />
deutsch<br />
Prozess A Prozess B<br />
Kommunikationspartner<br />
nastrowje<br />
englisch<br />
englisch<br />
Die Dolmetscher stellen je einen Kommunikationselektroniker ein,<br />
diese einigen sich auf die Übertragungsart <strong>und</strong> das Übertragungsmedium.<br />
ASCII<br />
deutsch<br />
guten Tag<br />
Die Kommunikationspartner einigen sich<br />
auf eine gemeinsame Vermittlungssprache<br />
<strong>und</strong> stellen da<strong>für</strong> je einen Dolmetscher ein.<br />
1010110010111001011<br />
Sieben-Schichten ISO/OSI-Referenzmodell<br />
Prozess A Prozess B<br />
Anwendung (7)<br />
Darstellung (6)<br />
Sitzung (5)<br />
Transport (4)<br />
Vermittlung (3)<br />
Sicherung (2)<br />
Physik (1)<br />
1001011000110011011110100101<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Anwendung (7)<br />
Darstellung (6)<br />
Sitzung (5)<br />
Transport (4)<br />
Vermittlung (3)<br />
Sicherung (2)<br />
Physik (1)<br />
russisch<br />
russisch<br />
ASCII<br />
Folie 19 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 21 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 23 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Kommunikation in offenen Automatisierungssystemen<br />
• Die Anforderung der Anlagenbetreiber, an einem Kommunikationssystem<br />
Geräte mehrerer Hersteller <strong>und</strong> unterschiedlicher Leistungsfähigkeit<br />
anschließen <strong>und</strong> betreiben zu können,<br />
fordert eine Offenlegung von Übertragungsspezifikationen.<br />
• Eine breite Akzeptanz ist ebenfalls wichtig.<br />
• Globalisierung der Märkte erfordert einheitliche<br />
Hardware- <strong>und</strong> Software-Schnittstellen.<br />
• Die International Standardization Organization ISO hat ein<br />
Referenzmodell <strong>für</strong> die Kommunikation in offenen System definiert:<br />
Open System Interconnection OSI<br />
Kommunikation im<br />
ISO/OSI-Referenzmodell<br />
ISO/OSI Referenzmodell<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Kommunikation im ISO/OSI-Referenzmodell<br />
Temperaturmessung Kesselheizung<br />
Sensor<br />
Temperatur<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Die Kommunikationspartner<br />
Sensor <strong>und</strong> Heizung einigen sich<br />
auf eine gemeinsame Sprache<br />
Spannung <strong>und</strong> stellen da<strong>für</strong><br />
je einen Mikrocontroller ein.<br />
1010110010111001011<br />
Heizung<br />
Leistungsschalter<br />
Spannung<br />
Die Mikrocontroller haben sich auf den<br />
CAN-Bus zur Messwertübertragung geeinigt. Spannung<br />
Sie übersetzen die analogen Spannungswerte<br />
in digitale Werte <strong>und</strong> verpacken diese<br />
digital 10 Bit<br />
im Telegramm des CAN-Bus. CAN Bus.<br />
digital 10 Bit<br />
µC<br />
Strukturen<br />
ISO/OSI – Schichtenmodell Zusammenfassung<br />
Layer Name Beschreibung<br />
7 Anwendung Schnittstelle zur Anwendung<br />
(Applikation)<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
µC<br />
Schreiben, lesen <strong>und</strong> Status der Daten ohne Details der<br />
Kommunikation<br />
6 Darstellung Datenanpassung Formatumwandlung, Komprimierung, Verschlüsselung…<br />
5 Sitzung Zuordnung der Daten zu<br />
lokalen Applikationen<br />
4 Transport Überwachung der<br />
Datenintergrität<br />
Synchronisation von Tasks auf Sende- <strong>und</strong><br />
Empfangsebene:<br />
Verbindungsaufbau <strong>und</strong> -überwachung,<br />
Zugangsberechtigung, …<br />
Umwandlung der Daten in die technologieabhängigen<br />
Botschaften der unteren Schichten:<br />
Logisch in physikalische Adressen, Paketaufteilung…<br />
3 Vermittlung Weiterleitung von Daten an<br />
andere Teilnehmer<br />
Lenkung der Botschaften in einem verzeigten Netz<br />
2 Link Datenübermittlung<br />
Botschaftsübertragung:<br />
zwischen zwei Teilnehmern<br />
an einem Bus<br />
Buszugriff, Fehlerprüfung, Synchronisation…<br />
1 Physik Netzwerkschnittstelle Elektrische <strong>und</strong> mechanische Eigenschaften des<br />
Übertragungsmediums <strong>und</strong> der Signale:<br />
Kabel, Steckverbinder, Kodierung, Steuersignale…<br />
Folie 20 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 22 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 24 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Schichten bei Feldbussystemen<br />
• Bei Feldbussen sind aufgr<strong>und</strong> nicht<br />
benötigter Dienste einiger Schichten<br />
(z.B. die Vermittlungsschicht, da alle<br />
Teilnehmer an einer Leitung<br />
angeschlossen sind.), <strong>und</strong> zur<br />
Kostenreduzierung häufig nur die<br />
Schichten 1, 2 <strong>und</strong> 7 realisiert.<br />
• Fehlende Funktionalitäten werden in<br />
diesen Schichten realisiert.<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Schicht 2: Sicherungsschicht (data link layer)<br />
Sicherung (2)<br />
Physik (1)<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Datenübertragung im Basisband<br />
Gleichstrombehaftete Kodierung<br />
NRZ<br />
RZ<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Anwendung (7)<br />
Darstellung (6)<br />
Sitzung (5)<br />
Transport (4)<br />
Vermittlung (3)<br />
Sicherung (2)<br />
Physik (1)<br />
Die zweite Schicht ist <strong>für</strong> den Aufbau <strong>und</strong><br />
die Aufrechterhaltung einer Verbindung<br />
zwischen zwei oder mehr Stationen verantwortlich.<br />
Dazu gehört auch das Verfahren,<br />
nach dem einzelne Stationen den Zugriff<br />
auf das Übertragungsmedium erhalten<br />
(Buszugriffsverfahren).<br />
Außerdem erfolgt in dieser Schicht die<br />
Kennzeichnung von Dateneinheiten<br />
(Telegrammen), die Markierung von<br />
Beginn <strong>und</strong> Ende eines Telegramms <strong>und</strong><br />
die Behandlung von Übertragungsfehlern.<br />
Quelle: Bussysteme i. d. Automatisierungstechnik, Vieweg<br />
Folie 25 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 27 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 29 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Schicht 7: Anwendungsschicht (application layer)<br />
Anwendung (7) An den Enden einer Kommunikationsverbindung<br />
stehen mindestens zwei<br />
Darstellung (6)<br />
Prozesse, die aus ihren technischen<br />
Funktionen heraus bestimmte Dienst-<br />
Sitzung (5)<br />
leistungen voneinander benötigen oder<br />
einen Dienst <strong>für</strong>einander leisten.<br />
Transport (4)<br />
Dabei werden von der Anwendungsschicht<br />
nicht diese Dienstleistungen erbracht,<br />
Vermittlung (3)<br />
sondern lediglich anwendungsspezifische<br />
Protokolle dargestellt.<br />
Sicherung (2)<br />
Es stehen also Prozedur- oder<br />
Variablendeklarationen zur Verfügung,<br />
die innerhalb der Applikation genutzt<br />
Physik (1)<br />
werden können.<br />
Busleitung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Schicht 1: physikalische Schicht (physical layer)<br />
Physik (1)<br />
Busleitung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Datenübertragung im Basisband<br />
Alternierendes Flankenpulsverfahren<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
In der physikalischen Schicht wird die<br />
Kodierung der Information auf der<br />
Leitung (z.B. Signalpegel, optische<br />
Datenübertragung oder Funkverbindung),<br />
alle Eigenschaften der physikalischen<br />
Verbindung also Art <strong>und</strong> Anschlußbelegung<br />
der zu verwendenden Steckverbinder,<br />
Leitungsarten, etc. sowie die Form<br />
der elektrischen Impulse einer Nachricht<br />
beim Sender <strong>und</strong> Empfänger beschrieben.<br />
Quelle: Bussysteme i. d. Automatisierungstechnik, Vieweg<br />
Folie 26 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 28 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 30 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Busarchitekturen<br />
Arten von Netzwerktopologien<br />
Stern:<br />
+ jeder Knoten eigene Anbindung<br />
+ optisch gut realisierbar<br />
- ggf. große Gesamtlänge<br />
- aufwendiger Sternkoppler<br />
- Kommunikation nur über Sternkoppler<br />
Baum:<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Echtzeitverhalten<br />
Bus:<br />
+ einfache Verkabelung<br />
- elektr. Kompromiß bei Busabschluß<br />
- begrenzte Anzahl von Busknoten <strong>und</strong> Buslänge<br />
Ring:<br />
+ minimaler Verkabelungsaufwand<br />
- ggf. aktive/passive Koppler notwendig<br />
+ ausgedehnte Netzwerke möglich<br />
- Ausfall eines Teilnehmers<br />
bedeutet Gesamtausfall des Netzwerks<br />
• Gleichzeitigkeit<br />
� Variablen (Meßwerte) <strong>und</strong> Alarme mehrerer Teilprozesse können wirkungsmäßig parallel<br />
übertragen werden.<br />
� Möglichkeiten zur ereignisorientierten Kommunikation sollten bestehen<br />
(Interruptanforderungen).<br />
� Das Buszugriffverfahren muß ein möglichst unbeeinträchtigtes Echtzeitverhalten haben.<br />
• Rechtzeitigkeit<br />
� Der Abschluß einer Kommunikation muss in einer bestimmten Zeit erfolgt sein,<br />
damit z. B. die aus den Informationen erzeugten Steuersignale einen bestimmten Jitter nicht<br />
überschreiten.<br />
• Vollständigkeit<br />
� Es müssen alle Informationen übertragen werden, <strong>und</strong> es dürfen auch bei Überlast keine<br />
Daten verlorengehen.<br />
• Störsicherheit<br />
� Das Übertragungsmedium muß in industrieller Umgebung gegen Störungen (<strong>und</strong><br />
Beschädigungen) unempfindlich sein (fehlertolerierendes Verhalten des Systems).<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Zugriffsarten<br />
Carrier Sense, Multiple Access (CSMA)<br />
Collision Detection CD:<br />
1. Knoten erkennen Kollision<br />
2. Abbruch der Übertragung<br />
3. Jeder Knoten versucht nach<br />
statistischer Wartezeit erneuter<br />
Datenübertragung<br />
Collision Avoidance CA:<br />
1. Knoten erkennen Kollision<br />
während Arbitrierungsphase<br />
2. nieder priorer Knoten 1 bricht<br />
Übertragung ab<br />
3. nach statistischer Wartezeit<br />
erneuter Versuch der<br />
Datenübertragung durch Knoten 1<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Teilnehmer erkennen Kollision<br />
<strong>und</strong> beenden Buszugriff<br />
1<br />
1 2<br />
1<br />
2<br />
1<br />
2<br />
2<br />
Teilnehmer 1 erkennt Kollision<br />
<strong>und</strong> beendet Buszugriff<br />
1<br />
2<br />
Statistische Wartezeit<br />
Statistische Wartezeit<br />
3<br />
3<br />
1<br />
3<br />
2<br />
t<br />
t<br />
Folie 31 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 33 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 35 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Datenrate - Leitungslänge<br />
max. Leitungslänge [m]<br />
5000<br />
4500<br />
4000<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
1000<br />
500<br />
0<br />
10<br />
5000<br />
2500<br />
20<br />
1000<br />
50<br />
125<br />
500<br />
250<br />
250<br />
Baudrate [kBaud]<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Zentral<br />
gesteuert<br />
Master-Slave<br />
z.B. Profibus DP<br />
Determinstisch<br />
(gesteuert)<br />
CSMA Carrier-Sense Multiple Access<br />
CD Collision Detect<br />
CA Collision Avoidance<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
µC<br />
CAN-Controller<br />
Transceiver<br />
500<br />
Dezentral<br />
gesteuert<br />
100 50 40<br />
800<br />
Zugriffsarten<br />
Einteilung von Buszugriffsverfahren<br />
T prop<br />
1000<br />
Zugriffsverfahren<br />
...<br />
Kollisionsfrei<br />
(CSMA/CA)<br />
z.B. CAN-Bus<br />
CSMA / CA: zeitlicher Ablauf der Busarbitation<br />
Sender M1<br />
Sender M2<br />
Sender M3<br />
Busleitung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Stochastisch<br />
(zufällig)<br />
µC<br />
CAN-Controller<br />
Transceiver<br />
Nicht<br />
kollisionsfrei<br />
(CSMA/CD)<br />
z.B. Ethernet<br />
M1 M2 M3 Bitorientierte Arbitration<br />
Synchronisation aller Teilnehmer<br />
Arbitrationsfeld Daten<br />
Nicht mehr<br />
gesendete<br />
Bits!<br />
Folie 32 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 34 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 36 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Zugriffsarten<br />
Master/Slave<br />
Busmaster verantwortlich <strong>für</strong> Steuerung des Buszugriffs<br />
durch zyklischen Aufruf (Pollen) der anderen Teilnehmer (Slaves) durch den Master<br />
Zykluszeit<br />
M � 1 1 � M M � 2 2 � M M � n n � M<br />
Master Slave 1 Master Slave 2 … Master Slave n Master Slave 1<br />
Nachteile:<br />
• Direkter Datenaustausch zwischen Slaves nur über Master,<br />
Master<br />
• Maximale Latenzzeit bestimmt durch Zykluslänge,<br />
• Jeder Slave wird abgefragt,<br />
egal ob dieser Kommunikationsbedarf hat oder nicht.<br />
Slave 1 Slave 2 … Slave n<br />
Vorteile:<br />
• Aufwand konzentriert im Master, einfache Slaves,<br />
• einfache Skalierbarkeit, da das gesamte Netzwerkprotokoll im Master implementiert ist.<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Feldbussysteme<br />
Vergleich<br />
BUS<br />
Sicherheit<br />
Topologie<br />
Buslänge<br />
Übertragungsrate<br />
Zykluszeit<br />
Teilnehmer<br />
ASi<br />
ASi-Safety at work<br />
Linie, Stern, Baum<br />
Mono-Master<br />
100m<br />
300m (Repeater)<br />
167kbit/s<br />
500µs (min.)<br />
5ms (31Slaves)<br />
10ms (62Slaves)<br />
31<br />
62<br />
CANopen<br />
CANopen-Safety<br />
Linie mit Stichltg.<br />
Multimaster<br />
40m (1Mbit/s)<br />
620m (100kbit/s)<br />
10km (5kbit/s)<br />
5kbit/s<br />
10kbit/s<br />
100kbit/s<br />
1Mbit/s<br />
abhängig von:<br />
-Tln.anzahl<br />
-Übertr.geschw.<br />
-Datenmenge<br />
-Art der Kommun.<br />
124<br />
Adressierung Adressiergerät, Codierschalter<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> automatisch<br />
elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Feldbussysteme<br />
Beispiel Vernetzungshierachie<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Interbus<br />
Interbussafety<br />
Ring<br />
Mono-Master<br />
400m Abstand<br />
13km (Cu-Ltg.)<br />
80km (LWL)<br />
500kbit/s (Cu)<br />
2Mbit/s (LWL)<br />
1ms ...linear<br />
steigend...<br />
7.8 ms<br />
(1 E/A) …<br />
(1096E/A)<br />
256, 4096 E/A<br />
automatisch<br />
Aufruf<br />
Antwort<br />
Profibus<br />
ProfiSafe<br />
Linie<br />
Mono-/Multimaster<br />
100m (12Mbit/s)<br />
200m (1.5Mbit/s)<br />
400m (500kbit/s)<br />
1km (187.5kbit/s)<br />
xx km (LWL)<br />
187.5<br />
500kbit/s (FMS)<br />
1.5Mbit/s (DP)<br />
12Mbit/s (DP)<br />
nach Datenrate <strong>und</strong><br />
Übertragungsmenge<br />
1ms:10Slaves/12Mbit/s<br />
2ms:10Slaves/1.5Mbit/s6<br />
ms:30Slaves/1.5Mbit/s<br />
32 pro Segment<br />
126 maximal<br />
Codierschalter<br />
Aufruf<br />
Quelle: Siemens AG<br />
Antwort<br />
Ethernet<br />
Stern<br />
t<br />
Safeethernet<br />
10MByte/s<br />
(1500 TIn.)<br />
12µs (256D-E/A)<br />
50µs (200A-E/A)<br />
350µs<br />
(12000d-E/A)<br />
100 (Segment)<br />
1024 (Netzwerk)<br />
48-Bit Länge<br />
(6-Bytes)<br />
Folie 37 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 39 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 41 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Token Passing<br />
An einem Bus können mehrere Master arbeiten.<br />
Dabei sind die Master zu einem logischen Ring<br />
zusammengeschlossen.<br />
Die Slaves können mehreren Mastern zugeordnet sein.<br />
M1<br />
S1 S2 S3 S4 S5 S6 S7 S8 S9<br />
S3 gehört zu<br />
M1 <strong>und</strong> M2,<br />
S4 gehört zu<br />
M2 <strong>und</strong> M1<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Feldbussysteme<br />
Übersicht Vernetzung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Überblick<br />
M2<br />
Internationaler Standard ( EN 50295 )<br />
Markteinführung 1993<br />
> 80 Mitglieder in 10 nat. Vereinen<br />
7% Marktanteil bei Feldbussen (2002)<br />
• Busverwaltung: Master – Slave System<br />
• Topologie: frei wählbar, z.B.: Bus, Baum,<br />
Ring<br />
• Leitungsart: ungeschirmte Zweidrahtleitung<br />
• Leitungslänge: 100m (500m mit Extender)<br />
• Teilnehmerzahl: 1 Master, 31 Slaves<br />
• Adressierung: feste Adresse vom Master oder<br />
Adressiergerät<br />
• Datenaustausch: Master-Slave � 4 Bit<br />
Slave-Master � 4 Bit<br />
• Datenrate: 167 kBit/s<br />
• Zykluszeit: abhängig von der Slaveanzahl<br />
bei 31 Slaves = 5 ms<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
M3<br />
Master Master 1 2 3 1 2 3 übergibt bedient<br />
seine an Master Slaves 23<br />
1<br />
Folie 38 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 40 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 42 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Aktor/Sensor-Interface<br />
Topologie<br />
• Die Topologie ist frei wählbar !!!<br />
(bei Netzausbau muss keine Topologie eingehalten werden)<br />
Slave<br />
Stern Linie Strang Baum<br />
Steuerung<br />
Slave<br />
Master<br />
Slave<br />
Slave<br />
Steuerung<br />
Slave<br />
Slave<br />
Slave<br />
Master<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Komponenten<br />
• Typische Komponenten eines<br />
AS-i Systems<br />
– Energieversorgung<br />
– Datenentkopplung<br />
– SPS (Master)<br />
– Slave-Module<br />
– Sensoren / Aktoren<br />
Energieversorgung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Anschlusstechnik<br />
Kodierte verpolsichere Flachleitung<br />
• Zwei-Leiter-Kabel <strong>für</strong> Daten<br />
<strong>und</strong> Energie<br />
Durchdringungstechnik<br />
• einfache, sichere Kontaktierung<br />
(Piercing Technologie)<br />
• hohe Schutzart IP67, auch nach<br />
Entfernung der Verbindung<br />
(Selbstheilung)<br />
Direkter einfacher Anschluß von<br />
Sensoren/Aktoren oder Modulen<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Slave<br />
Slave<br />
Slave<br />
Datenentkopplung<br />
Steuerung<br />
Master<br />
Slave<br />
Slave<br />
Steuerung<br />
CPU<br />
AS-Interface-<br />
Master<br />
AS-Interface-<br />
Slave<br />
Slave<br />
Koppelmodul<br />
Modul-Schaltung<br />
S / A S / A S / A S / A<br />
Durchdringungsdorne<br />
Slave<br />
Slave<br />
SPS, IPC<br />
Steuerung<br />
Slave<br />
Master<br />
Slave<br />
AS-Interface-Leitung<br />
Slave<br />
Slave<br />
Slave<br />
AS-Interface-<br />
Slave<br />
Sensor /<br />
Aktuator<br />
Sensor mit<br />
integriertem<br />
AS-Interface<br />
verpolsichere<br />
Flachleitung<br />
AS-Interface<br />
Elektromechanik<br />
Folie 43 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 45 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 47 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Aktor/Sensor-Interface<br />
Vergleich konventionelle Verdrahtung �� �� �� �� AS-Interface<br />
konventionelle Verdrahtung �� �� �� �� AS-Interface<br />
(1) EA-Karten (4) Unterverteiler<br />
(2) Rangierklemmen (5) Sensoranschlüsse<br />
(3) Kabelbaum<br />
ASI +<br />
ASI -<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Aufbau Empfänger<br />
Interface 1 Interface 2<br />
Stromversorgung<br />
Sender<br />
Empfänger<br />
AblaufAblaufsteuerung Steuerung<br />
nichtflüchtiger<br />
Speicher<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Daten<br />
I/O<br />
Parameter<br />
Output<br />
•Dekodierung <strong>und</strong> Fehlererkennung<br />
•Anwortgenerierung<br />
•flüchtiger <strong>und</strong> nichtflüchtiger Speicher (EEPROM)<br />
Aktor/Sensor-Interface<br />
Energieversorgung <strong>und</strong> Datenaustausch<br />
Quelle: Bussysteme in der Automatisierungstechnik, Vieweg Verlag<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
U+<br />
U0<br />
RESET<br />
D0<br />
D1<br />
D2<br />
D3<br />
Data Strobe<br />
P0<br />
P1<br />
P2<br />
P3<br />
Parameter Strobe<br />
Folie 44 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 46 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 48 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Aktor/Sensor-Interface<br />
Physical Layer – Modulation im Sender<br />
Zu übertragende<br />
Bit - Sequenz<br />
Manchester - II<br />
Code<br />
Sendestrom<br />
Signal auf<br />
der Ltg.<br />
60 mA<br />
0 mA<br />
U b + 2 V<br />
U b - 2 V<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Nachrichtenpaket (SB=0)<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
0 0 1 0<br />
I4 I3 I2 I1 I0<br />
Pause<br />
Datenaufruf 0 D3 D2 D1 D0<br />
Parameteraufruf 1 P3 P2 P1 P0<br />
Adressieraufruf A4 A3 A2 A1 A0<br />
Stromquelle mit<br />
Kurvenformung<br />
Spannungspulse<br />
näherungsweise si2-<br />
Funktion, daher niedrige<br />
obere Grenzfrequenz <strong>und</strong><br />
Störabstrahlung<br />
U = -L di/dt<br />
• Datenaufruf:<br />
Setzen der Ausgänge <strong>und</strong> Lesen der Eingänge<br />
• Parameteraufruf:<br />
Setzen der Parameterausgänge des Slaves<br />
• Adressieraufruf:<br />
Zuweisung einer Adresse an einen Slave mit Adresse 00h. Slave<br />
speichert neue Adresse im EEPROM<br />
Aktor/Sensor-Interface<br />
Übertragung von Analogdaten<br />
• 4 Datenbit: d.h. keine direkte Übertragung von Analogdaten möglich<br />
• nicht ein Zugriff<br />
sondern Zeitmultiplex<br />
• Ein 16-Bit Wert wird<br />
in insgesamt 8<br />
Datenzyklen<br />
transportiert<br />
• Übertragungszeit:<br />
8 x 5ms, also 40ms<br />
• Das ist <strong>für</strong> die allermeisten Anwendungen, wie Temperaturen,<br />
Füllstände, Druck usw. immer noch schnell genug.<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 49 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 51 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 53 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Aktor/Sensor-Interface<br />
Kommunikationsablauf<br />
• AS-i ist ein reines Master / Slave System<br />
• Slaves werden vom Master zyklisch gepollt<br />
• Zykluszeit ist abhängig von der Zahl der Slaves<br />
• z.B. 6 Tln. � 1ms; 31 Tln. � 5ms<br />
• Der Master kann ein gestörtes Telegramm innerhalb des Zyklusses<br />
wiederholen<br />
Dateneffizienz ca. 32%<br />
S S A A A A A I I I I I P E<br />
T B 4 3 2 1 0 4 3 2 1 0 B B<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Masteraufruf<br />
ST<br />
SB<br />
A4 .. A0<br />
I4 .. I0<br />
PB<br />
EB<br />
Aktor/Sensor-Interface<br />
Kommandopaket (SB=1)<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Masterpause<br />
Slaveantwort<br />
3 .. 10<br />
Bit<br />
S I I I I P E<br />
T 3 2 1 0 B B<br />
= Startbit = 0<br />
= Steuerbit<br />
= Adresse des Slaves<br />
= Informationsbits Master - Slave 5 Bit<br />
Slave - Master 4 Bit<br />
= Paritätsbit<br />
= Endebit = 1<br />
I4 I3 I2 I1 I0<br />
Slave 1 1 1 0 0<br />
Adresse löschen 0 0 0 0 0<br />
E/A-Konf. lesen 1 0 0 0 0<br />
ID-Code lesen 1 0 0 0 1<br />
Status lesen 1 1 1 1 0<br />
... <strong>und</strong> löschen 1 1 1 1 1<br />
• Adresse löschen:<br />
Slaveadresse wird vorübergehend auf 00h gesetzt<br />
• E/A-Konfiguration lesen:<br />
Slave überträgt seine eingestellte E/A-Konfiguration<br />
• ID-Code lesen:<br />
unveränderbaren ID-Code lesen. => Profilzuordnung<br />
• Status lesen:<br />
Slave überträgt seine Statusbits<br />
Aktor/Sensor-Interface<br />
Fehlererkennung<br />
Erkennung durch a-priori<br />
Kenntnis des Telegrammaufbaus<br />
Sehr hohe Zuverlässigkeit:<br />
1- <strong>und</strong> 2-fach-Impulsfehler in<br />
einer Nachricht werden<br />
immer erkannt.<br />
3- <strong>und</strong> 4-fach-Impulsfehler<br />
werden zu mind. 99,9999 %<br />
erkannt.<br />
Alternation:<br />
Aufruflänge: Pause: Information:<br />
Parität: Endbit: Startbit:<br />
Zwei Nach Zwischen Die<br />
In Der 1. Summe<br />
der Impuls aufeinander<br />
letzte dem zweiten zwei Endebit eines aller im<br />
folgende des Impulsen Codewort<br />
Bithälfte Impuls ASI- Masteraufrufes muß eine Impulse innerhalb stets<br />
müssen dar eine enthaltenen<br />
ein gültigen Telegramms Impuls kein Telegramms Impuls 1-Bits<br />
liegenmehr<br />
unterschiedliche<br />
übertragen darf (pos. Codewortes muß maximal Impulse ein werden ein in der<br />
Polarität Impulslänge zweiten muß negativer ein Bithälfte) aufweisen Ruhe<br />
herrschen muß postiver Impuls eine sein gerade Impuls<br />
Zahl seinergeben<br />
korrektes<br />
Telegramm<br />
Startbit<br />
Alternation<br />
Pause<br />
Information<br />
Parität<br />
Endebit<br />
Aufruflänge<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Slavepause<br />
1<br />
Bit<br />
ST SB A4 A3 A2 A1 A0 I4 I3 I2 I1 I0 PB EB P<br />
Folie 50 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 52 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 54 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Aktor/Sensor-Interface<br />
Adressiergerät<br />
• Vor Inbetriebnahme der Anlage muss jeder Teilnehmer eine eindeutige<br />
Adresse besitzen<br />
• Master<br />
– muss Adressierfunktion unterstützen<br />
– nur ein Slave darf Adresse 0 haben!<br />
• Adressiergerät<br />
– nur ein Slave zur Zeit<br />
– aktuelle Adresse ermitteln<br />
– neue Adresse schreiben<br />
– weniger Sicherheitsüberprüfungen,<br />
da nur 1 Gerät zur Zeit parametriert wird<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Applikation<br />
Schleifring<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Sicherheit – Safety at Work Arbeitsprinzip<br />
• Jeder Slave besitzt eine eindeutige 8 * 4 Bit Codetabelle<br />
• Per “Teach In“- Funktion liest der Sicherheitsmonitor die Codetabellen aller<br />
sicheren Slaves ein<br />
• Im Betrieb erfolgt ein permanenter Vergleich der erwarteten <strong>und</strong> der<br />
gesendeten Code- Tabellen.<br />
• Abschaltung durch den Sicherheitsmonitor erfolgt bei<br />
erwartetem Code ≠ gesendetem Code, d.h. wenn:<br />
• ein Stopp angefordert wurde (0000)<br />
• die Kommunikation gestört ist<br />
• die übertragenen Folgen falsch sind<br />
• der sichere Slave zerstört ist<br />
• fehlende oder verspätete Slaveantworten erkannt werden<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 55 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 57 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 59 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Aktor/Sensor-Interface<br />
Profilbeispiel<br />
• Zuordnung der Datenbits:<br />
D0 (E): Meßwert<br />
D1 (E): Warnsignal<br />
D2 (E): Sensor verfügbar / nicht verfügbar<br />
D3 (A): Testfunktion<br />
• Zuordnung der Parameterbits:<br />
P0: niedrige / hohe Arbeitsfrequenz<br />
P1: Schaltersignal invertieren<br />
P2: Schaltschwelle (bei induktiven Sensoren)<br />
Timerfunktion ein / aus (optische Sensoren)<br />
P3: Sonderfunktionen<br />
• Die Verwendung von D1..D3 sowie von P0...P3 ist optional<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Aktor/Sensor-Interface<br />
Sicherheit – Safety at Work Kompatibilität<br />
Sicherheitsgerichtete- <strong>und</strong> Standardkomponenten<br />
in einem AS-Interface-Netz<br />
Standard-SPS <strong>und</strong><br />
Standard-Master Sicherheitsmonitor<br />
AS-i -<br />
Netzteil<br />
Sichere<br />
Lichtschranke<br />
Standard-<br />
Modul<br />
Sicheres<br />
Lichtgitter<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Standard-<br />
Modul<br />
Aktor/Sensor-Interface<br />
Sicherheit – Safety at Work Funktionsprinzip<br />
Sicherer<br />
Not-Aus-Taster<br />
Sicheres-<br />
Modul<br />
Sicherer<br />
Positionsschalter<br />
Dynamisierte Codetabellen garantieren Übertragung sicherer Daten<br />
am AS-Interface<br />
Standard SPS <strong>und</strong><br />
Standard Master<br />
AS-i Netzteil<br />
Master Aufruf<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Sicherheitsmonitor<br />
Slave Antwort<br />
Sicherer Slave<br />
Folie 56 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 58 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 60 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Profibus<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Universelle Einsetzbarkeit<br />
Leitebene<br />
Buszykluszeit<br />
< 1000 ms CNC<br />
Zellebene<br />
Buszykluszeit<br />
< 100 ms<br />
Feldebene<br />
Buszykluszeit<br />
< 10 ms<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Offenes System<br />
User<br />
Application<br />
(7)<br />
(3)-(6)<br />
Data Link<br />
(2)<br />
Physical<br />
(1)<br />
Layer<br />
VME/PC<br />
Rechner<br />
Ethernet/TCP/IP TCP/IP/Ethernet<br />
PROFIBUS-FMS<br />
SPS<br />
FMS<br />
FMS<br />
Geräteprofile<br />
Fieldbus Message<br />
Specification (FMS)<br />
PROFIBUS-DP<br />
* Die Integration als Anhang 2 zur EN 50170 Volume2 wurde beantragt<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
PLS<br />
DP<br />
PC/VME<br />
Nicht ausgeprägt<br />
Fieldbus Data Link (FDL)<br />
RS-485 / Fiber Optic<br />
DP-Profile<br />
PROFIBUS-PA<br />
PA<br />
PA-Profile<br />
DP-Funktionserweiterungen<br />
DP-Gr<strong>und</strong>funktionen<br />
IEC Interface*<br />
IEC 1158-2<br />
EN 50 170 PROFIBUS Richtlinien<br />
Folie 61 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 63 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 65 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Profibus<br />
Automatisation in der Industrie<br />
1987<br />
Erste Aktivitäten<br />
von Bosch,<br />
Klöckner Moeller<br />
<strong>und</strong> Siemens<br />
1988<br />
Vorabstandard<br />
DIN 19245<br />
veröffentlicht<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Übersicht Anwendungen<br />
Allgemeine<br />
Automatisierung<br />
PROFIBUS-FMS<br />
RS 485 / LWL<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
1989<br />
Erste Vorführung<br />
mit Geräten<br />
verschiedener<br />
Hersteller auf<br />
Messen<br />
EN 50170 Volume 2<br />
Fertigungsautomatisierung<br />
PROFIBUS-DP<br />
RS 485 / LWL<br />
1991<br />
1993<br />
1995<br />
DIN 19245<br />
Teil 1+2, 3, 4<br />
FMS, DP, PA<br />
Prozessautomatisierung<br />
PROFIBUS-PA<br />
IEC 1158-2<br />
Universell Schnell Branchenorientiert<br />
- Breiter Anwendungsbereich<br />
- Multi-master Kommunikation<br />
Profibus<br />
Layer 1 – Topologie RS485<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
- Plug and Play<br />
- Effizient <strong>und</strong> kostengünstig<br />
- Busspeisung<br />
- Eigensicherheit<br />
Profibus verwendet Linientopologie, andere Topologien durch Segmentierung:<br />
Master<br />
Segment 1<br />
S SR<br />
S<br />
Segment 3<br />
SR<br />
Segment 2<br />
S S<br />
S<br />
� maximal 32 Stationen pro Segment<br />
� maximal 126 Stationen insg. zulässig<br />
S<br />
�maximal 3 Repeater zwischen 2 Stationen<br />
�Busabschluss notwendig<br />
An- <strong>und</strong> Abkoppeln von<br />
Stationen im Betrieb<br />
möglich.<br />
Folie 62 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 64 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 66 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Profibus<br />
Layer 1 – RS485 Verschaltung<br />
Erste Station<br />
VP<br />
B<br />
A<br />
DGND<br />
Profibus<br />
Buszugriff<br />
Busabschluss<br />
390 Ω<br />
220 Ω<br />
390 Ω<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Layer 7 – Merkmale Profibus FMS<br />
Datenleitung B<br />
Datenleitung A<br />
Busabschluss<br />
A B A B<br />
Station 2 Station 3<br />
� Verbindet intelligente Feldgeräte wie SPS, PC<br />
390 Ω<br />
220 Ω<br />
390 Ω<br />
� Leistungsfähige Anwendungsfunktionen bieten große Funktionalität<br />
� Zugriff auf Variablen, Programme <strong>und</strong> Domains möglich<br />
� PROFIBUS-FMS arbeitet objektorientiert<br />
� Multi-Master <strong>und</strong> Master - Slave Kommunikation möglich<br />
� Peer-to-Peer, Broadcast <strong>und</strong> Multicast Kommunikation<br />
� Zyklische <strong>und</strong> azyklische Datenübertragung möglich<br />
� Bis zu 240 Byte Ein- <strong>und</strong> Ausgangsdaten pro Station<br />
� Unterstützt von allen wichtigen SPS-Herstellern<br />
� Große Produktvielfalt: SPS/PC, E/A, Antriebe, Ventile, Encoder ....<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Letzte Station<br />
VP<br />
B<br />
A<br />
DGND<br />
Folie 67 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 69 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Profibus<br />
Medium Attachment Unit <strong>für</strong> Profibus PA<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Systemzustände<br />
Quelle: Bussysteme i. d. Automatisierungstechnik, Vieweg<br />
Vom System beherrschte Stör- <strong>und</strong> Betriebszustände<br />
06.06.2007<br />
Feldbussen<br />
� Mehrfachtoken<br />
mit<br />
� Der Verlust des Tokens<br />
Kommunikation<br />
� Fehler bei der Tokenweitergabe<br />
Industrielle VL<br />
� Mehrfachbelegung von Teilnehmeradressen<br />
� Teilnehmer mit gestörtem Sender / Empfänger<br />
Form T. Dr.<br />
� Zufügen <strong>und</strong> Entfernen von Teilnehmern<br />
� Kombinationen von aktiven <strong>und</strong> passiven Stationen<br />
70<br />
Quelle: Bussysteme i. d. Automatisierungstechnik, Vieweg Folie<br />
Folie 71 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Layer 7 – objektorientierung FMS<br />
� Prozessvariablen, Parameter werden als Kommunikationsobjekte bezeichnet<br />
� Jedes Kommunikationsobjekt hat festgelegte Eigenschaften (Read/Write...)<br />
� Die Kommunikationsobjekte werden im Objektverzeichnis (OV) abgelegt<br />
� Das OV wird individuell <strong>für</strong> jeden Teilnehmer bei der Projektierung erstellt<br />
Steuerung<br />
Kommunikationsbeziehung<br />
PROFIBUS-FMS<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Objekte eines typischen FMS Gerätes<br />
Stückzahl<br />
Stillstandzeit<br />
Fehlerrate<br />
Folie 68 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 72 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Profibus<br />
Layer 7 – Beispiel Objektverzeichnis<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Objektverzeichnis (OD)<br />
Header<br />
• ROM/RAM Flag<br />
• Namenslänge, Zugriffsschutz, Version OV<br />
• Erster Index <strong>und</strong> Länge des statischen OV<br />
• Erster Index <strong>und</strong> Länge des Datentyp OV<br />
• Erster Index <strong>und</strong> Länge der dynamischen OV Teile<br />
Datentypverzeichnis<br />
Index Objekt-Code Bedeutung<br />
1 Datentyp Integer 8<br />
....... Datentyp Integer 16<br />
6 Datentyp Floating Point<br />
Statisches Objektverzeichnis<br />
Index Objekt- Daten- Interne<br />
Symbol<br />
Code Typ Adresse<br />
20 VAR 1 4711H Stückzahl<br />
21 VAR 2 5000H Ausfallrate<br />
22 VAR 6 100H Stillstandszeit<br />
Profibus<br />
Projektierung am Beispiel PA<br />
Geräteprofile (vereinfacht)<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Profisafe Struktur<br />
● Software realisierten<br />
Sicherheitsmaßnahmen<br />
● Neue Schicht<br />
● Sicherheits- <strong>und</strong> Standardgeräte an dem<br />
selben Buskabel.<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Status<br />
Messwert<br />
Messbereich<br />
Filterzeit<br />
Alarmlimits<br />
Alarm summary<br />
TAG<br />
Herstellerspezifische<br />
Parameter<br />
DP Dienste<br />
zyklisch<br />
DP Dienste<br />
azyklisch<br />
DP Dienste<br />
azyklisch<br />
● Keine Zusatz-Hardware <strong>und</strong><br />
Stromversorgung<br />
PA-Profil<br />
(z.B. <strong>für</strong><br />
Druckmessumformer)<br />
Folie 73 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 75 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 77 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Profibus<br />
Layer 7 – Kommunikationsbeziehungen FMS<br />
Die Datenübertragung zwischen den Stationen wird durch<br />
Kommunikationsbeziehungen geregelt.<br />
� Die Kommunikationsbeziehungen ermöglichen Zugriffsschutz <strong>und</strong> automatische<br />
Verbindungsüberwachung. Kommunikationsbeziehungen<br />
Master/<br />
Master/<br />
Master<br />
Master<br />
verbindungsverbindungsorientiertorientiert<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Master/<br />
Master/<br />
Slave<br />
Slave<br />
Mit oder ohne Slave-Initiative<br />
azyklisch zyklisch oder azyklisch<br />
Broadcast<br />
Broadcast<br />
verbindungsverbindungsloslos<br />
Bestätigung erforderlich Bestätigung nicht erforderlich<br />
Alle Kommunikationsbeziehungen werden in die Kommunikationsbeziehungsliste eingetragen (KBL)<br />
Profibus<br />
Profisafe Anwendung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Profibus<br />
Profisafe Anwendung<br />
Multicast<br />
Multicast<br />
Quelle: Bussysteme i. d. Automatisierungstechnik, Vieweg<br />
Maßnahmen zur Fehlervermeidung:<br />
● Übertragungsmechanismus, der zu jeder Zeit die „Lieferung“ aktueller Daten<br />
sicherstellt<br />
● Empfänger, der aktualisierte Daten innerhalb einer bestimmten Zeitspanne erwartet<br />
● Eine <strong>für</strong> Master- <strong>und</strong> Slavegeräte eindeutige Identifizierung im Netzwerk <strong>und</strong><br />
● Eine Methode zur Aufdeckung verfälschter Daten.<br />
► Sicherheitsklassen SIL 3<br />
(Safety Integrity Level,<br />
IEC 61508)<br />
► Kategorie 4 (EN 954-1).<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 74 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 76 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 78 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
CAN<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
CAN-Bus<br />
Aufbau Datentelegramm<br />
• Daten werden in Telegrammen (Botschaften) versendet<br />
• Strukturierter Aufbau:<br />
– Startbit (Start of Frame, SOF)<br />
– Identifier (Absender) gleichzeitig Arbitration Field (Buszugriffskontrolle)<br />
– Steuerfeld mit Datenlänge - Control Field<br />
– Daten (0 - 8 Byte)<br />
– CRC (Fehlerüberprüfung, d=6)<br />
– Acknowledge (von mindestens einem Empfänger)<br />
– Stopbits (End of Frame, EOF (Pause))<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
CAN-Bus<br />
Pegelerzeugung High-Speed CAN<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 79 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 81 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 83 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Zugriffsarten<br />
Inhaltsadressierung am Beispiel CAN<br />
Motorsteuergerät<br />
Zündung <strong>und</strong><br />
Einspritzung<br />
Lastregelung<br />
Kombiinstrument<br />
Darstellung von<br />
Geschwindigkeit,<br />
Drehzahl etc.<br />
Getriebesteuergerät<br />
Gangwahl<br />
Beschleunigung<br />
Verzögerung<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Bremsensteuergerät<br />
ABS<br />
ASR<br />
ESP<br />
• Jeder Busteilnehmer empfängt alle Datentelegramme.<br />
• Die Adresse der Datentelegramme beschreibt deren Inhalt <strong>und</strong> nicht das Ziel.<br />
Datenfestlegungstabelle:<br />
• Nach dem Empfang eines Telegramms wertet jeder Busknoten über ein Akzeptanzfilter aus, ob<br />
die enthaltene Information weiterverarbeitet wird oder nicht.<br />
• Analoges Beispiel:<br />
Verkehrsnachrichten im Radio, jeder Empfänger (Radio) decodiert alle Nachrichten. Der Hörer<br />
entscheidet <strong>für</strong> sich, ob die Informationen <strong>für</strong> ihn gerade relevant sind oder nicht.<br />
CAN-Bus<br />
Zugriffskontrolle - Arbitration<br />
Alle CAN-Bus-Tranceiver (Treiber) eines Netzwerkes sind als hartverdrahtete ODER-Verschaltung ausgelegt.<br />
Wenn mehrere Tranceiver (Busknoten) gleichzeitig versuchen einen dominanten <strong>und</strong>/oder rezessiven Buspegel<br />
einzustellen, überschreibt bei gleichzeitiger Sendung ein dominantes Bit immer ein rezessives. Die Logik im<br />
Schnittstellenbaustein der rezessiven Teilnehmer erkennt dies als Arbitrationsverlust <strong>und</strong> zieht seinen Sender<br />
<strong>für</strong> die Dauer des anliegenden Telegramms (Botschaft) vom Bus zurück.<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
CAN-Bus<br />
Telegrammaufbau – Ackknowledge<br />
Knoten 3 gewinnt den Buszugriff<br />
<strong>und</strong> überträgt seine Daten<br />
CAN-Telegramm<br />
R<br />
06.06.2007<br />
1 12/32 6 0…64 16 1 1 7<br />
D<br />
Acknowledge<br />
R<br />
Feldbussen mit<br />
D<br />
Kommunikation Industrielle<br />
Acknowledge Slot (1 bit)<br />
Acknowledge Delimiter (1 bit)<br />
VL<br />
Sender verhält sich rezessiv, jeder Knoten,<br />
rezessiv<br />
der das Telegramm empfängt, erzeugt hier<br />
ein dominantes Bit.<br />
Form T.<br />
Damit kann der Sender sicherstellen, dass<br />
Dr.<br />
mindestens ein anderer Knoten seine Botschaft<br />
empfangen hat <strong>und</strong> er noch mit dem Netzwerk<br />
verb<strong>und</strong>en ist.<br />
84<br />
Quelle: Müller, Gr<strong>und</strong>lagen der Kfz-Elektronik, Hanser Verlag Folie<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 80 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 82 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
CAN-Bus<br />
Blockschaltbild fehlertoleranter Low-Speed Tranceiver<br />
Zeitabschaltung gegen<br />
fehlerhafte dominante Pegel<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
CAN-Bus<br />
Elektrische Fehlerfälle<br />
Flankensteilheitskontrolle<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
CAN OPEN<br />
Warum <strong>und</strong> Wozu<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Zuschaltbare<br />
Abschlusswiderstände<br />
Fehlerlogik<br />
Quelle: Datenblatt TJA1054, Fa. Philips<br />
Eingangsfilter zur<br />
Verbesserung der<br />
Störunempfindlichkeit<br />
Quelle: www.elektronikschule.de<br />
Folie 85 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 87 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 89 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
CAN-Bus<br />
Verhalten eines Busknotens im Fehlerfall<br />
Zustandsdiagramm:<br />
Sendefehlerzähler: Empfangsfehlerzähler:<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
CAN OPEN<br />
Warum <strong>und</strong> Wozu<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
• Error active: Knoten nimmt weiter an Kommunikation teil,<br />
sendet aber ACTIVE ERROR FLAG<br />
Andere Teilnehmer erfahren so, dass eine Störung vorlag.<br />
• Error passive: Knoten nimmt weiter an Kommunikation<br />
teil, unterdrückt aber ACTIVE ERROR FLAG<br />
Hiermit wird sichergestellt, dass ein gestörter Teilnehmer<br />
nur <strong>für</strong> begrenzte Zeit Telegramme blockieren kann.<br />
• Bus Off: Ausgangstreiber abgeschaltet<br />
Teilnehmer ist so stark gestört, dass er vom Bus isoliert<br />
wird.<br />
CANopen ist eine standardisierte Anwendung <strong>für</strong> verteilte industrielle Automatisierungssysteme<br />
auf der Basis von CAN.<br />
• ist ein standardisiertes Schicht-7-Protokoll.<br />
• beschreibt standardisierte Geräteprofile <strong>und</strong> ihre Funktionalität. (Kommunikationsprofil)<br />
• ermöglicht den einfachen Austausch von Geräten in einem offenen System.<br />
• ermöglicht die leichte Integration neuer Geräte.<br />
• ermöglicht einer Anwendung, auf einer definierten Daten- <strong>und</strong> Objektschnittstelle zu arbeiten.<br />
• realisiert Plug&Play-fähige CAN-Systeme.<br />
• definiert das „Wie“ <strong>und</strong> das „Was“ der Kommunikation.<br />
Beschreibung der Funktionalität <strong>und</strong> Parameter von Gerätetypen in Geräteprofilen <strong>für</strong>:<br />
• digitale <strong>und</strong> analoge Ein/Ausgabemodule (CIA Device Profile 402),<br />
• Antriebe (CIA Device Profile 402),<br />
• Mensch-Maschine-Interface (MMI/HMI) (CIA Device Profile 403),<br />
• Regler (CIA Device Profile 404),<br />
• programmierbare Steuerungen (CIA Device Profile 405),<br />
• Encoder (CIA Device Profile 406).<br />
Ethernet <strong>und</strong> drahtlose Netzwerke im<br />
Industrieeinsatz<br />
Prof. Dr.-Ing. T. Form<br />
Lehrstuhl <strong>für</strong> elektronische Fahrzeugsysteme<br />
<strong>Institut</strong> <strong>für</strong> Regelungstechnik, TU Braunschweig<br />
Folie 86 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 88 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007<br />
Folie 90 Dr. T. Form VL Industrielle Kommunikation mit Feldbussen 06.06.2007
Ethernet <strong>und</strong> drahtlose Netzwerke<br />
Echtzeitanforderungen<br />
Real-Time (RT)<br />
• Verwendung von<br />
Standard-Komponenten<br />
• Leistungsklasse wie<br />
heutige Feldbussysteme<br />
(z.B. PROFIBUS)<br />
• Typisches<br />
Anwendungsfeld ist die<br />
Factory Automation<br />
Isochrones Real-Time<br />
(IRT)<br />
• Taktsynchrone<br />
Datenübertragung<br />
Zykluszeiten