Simulink® Modeling for Vehicle Simulator Design - Delphi
Simulink® Modeling for Vehicle Simulator Design - Delphi
Simulink® Modeling for Vehicle Simulator Design - Delphi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
CAN message logs collected from the vehicle are transmitted<br />
back to the ECU by Simulink ® model in real time to verify<br />
the functionally of vehicle control algorithms. During this<br />
activity, the Simulink ® model monitors software variables in<br />
the ECU via the DAQ feature of CCP. Symbol in<strong>for</strong>mation<br />
parameters are read from an A2L file by a python script and<br />
passed to the model.<br />
9. TEST AUTOMATION USING<br />
PYTHON SCRIPTS<br />
Verification of functional test procedures can be automated<br />
with the help of python scripts which establish required<br />
values <strong>for</strong> Simulink ® signals. A set of library modules is<br />
developed with various functions that can be called from<br />
python scripts and can be reused across multiple programs.<br />
Figure 20. Python Scripting Window<br />
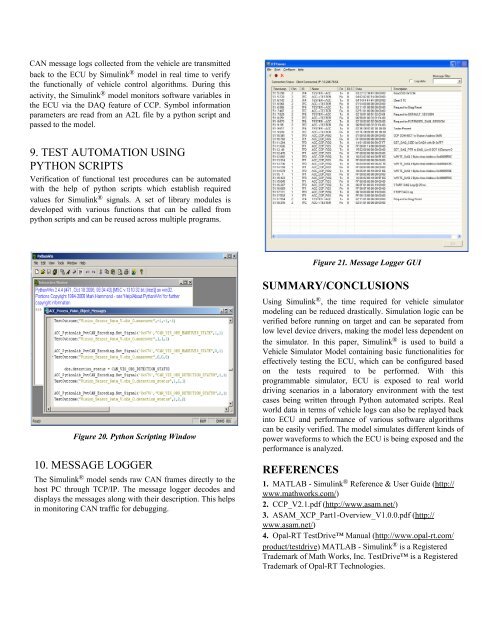
10. MESSAGE LOGGER<br />
The Simulink ® model sends raw CAN frames directly to the<br />
host PC through TCP/IP. The message logger decodes and<br />
displays the messages along with their description. This helps<br />
in monitoring CAN traffic <strong>for</strong> debugging.<br />
Figure 21. Message Logger GUI<br />
SUMMARY/CONCLUSIONS<br />
Using Simulink ® , the time required <strong>for</strong> vehicle simulator<br />
modeling can be reduced drastically. Simulation logic can be<br />
verified be<strong>for</strong>e running on target and can be separated from<br />
low level device drivers, making the model less dependent on<br />
the simulator. In this paper, Simulink ® is used to build a<br />
<strong>Vehicle</strong> <strong>Simulator</strong> Model containing basic functionalities <strong>for</strong><br />
effectively testing the ECU, which can be configured based<br />
on the tests required to be per<strong>for</strong>med. With this<br />
programmable simulator, ECU is exposed to real world<br />
driving scenarios in a laboratory environment with the test<br />
cases being written through Python automated scripts. Real<br />
world data in terms of vehicle logs can also be replayed back<br />
into ECU and per<strong>for</strong>mance of various software algorithms<br />
can be easily verified. The model simulates different kinds of<br />
power wave<strong>for</strong>ms to which the ECU is being exposed and the<br />
per<strong>for</strong>mance is analyzed.<br />
REFERENCES<br />
1. MATLAB - Simulink ® Reference & User Guide (http://<br />
www.mathworks.com/)<br />
2. CCP_V2.1.pdf (http://www.asam.net/)<br />
3. ASAM_XCP_Part1-Overview_V1.0.0.pdf (http://<br />
www.asam.net/)<br />
4. Opal-RT TestDrive Manual (http://www.opal-rt.com/<br />
product/testdrive) MATLAB - Simulink ® is a Registered<br />
Trademark of Math Works, Inc. TestDrive is a Registered<br />
Trademark of Opal-RT Technologies.