Unmanned Systems Integrated Roadmap FY2011-2036 - Defense ...
Unmanned Systems Integrated Roadmap FY2011-2036 - Defense ...
Unmanned Systems Integrated Roadmap FY2011-2036 - Defense ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Unmanned</strong> <strong>Systems</strong> <strong>Integrated</strong> <strong>Roadmap</strong> <strong>FY2011</strong>-<strong>2036</strong><br />
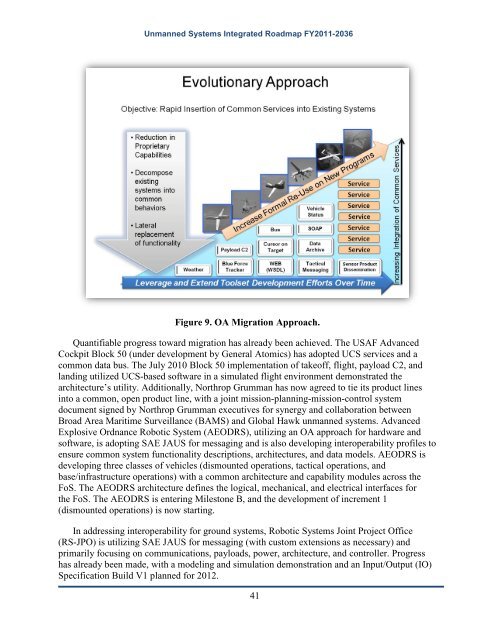
Figure 9. OA Migration Approach.<br />
Quantifiable progress toward migration has already been achieved. The USAF Advanced<br />
Cockpit Block 50 (under development by General Atomics) has adopted UCS services and a<br />
common data bus. The July 2010 Block 50 implementation of takeoff, flight, payload C2, and<br />
landing utilized UCS-based software in a simulated flight environment demonstrated the<br />
architecture’s utility. Additionally, Northrop Grumman has now agreed to tie its product lines<br />
into a common, open product line, with a joint mission-planning-mission-control system<br />
document signed by Northrop Grumman executives for synergy and collaboration between<br />
Broad Area Maritime Surveillance (BAMS) and Global Hawk unmanned systems. Advanced<br />
Explosive Ordnance Robotic System (AEODRS), utilizing an OA approach for hardware and<br />
software, is adopting SAE JAUS for messaging and is also developing interoperability profiles to<br />
ensure common system functionality descriptions, architectures, and data models. AEODRS is<br />
developing three classes of vehicles (dismounted operations, tactical operations, and<br />
base/infrastructure operations) with a common architecture and capability modules across the<br />
FoS. The AEODRS architecture defines the logical, mechanical, and electrical interfaces for<br />
the FoS. The AEODRS is entering Milestone B, and the development of increment 1<br />
(dismounted operations) is now starting.<br />
In addressing interoperability for ground systems, Robotic <strong>Systems</strong> Joint Project Office<br />
(RS-JPO) is utilizing SAE JAUS for messaging (with custom extensions as necessary) and<br />
primarily focusing on communications, payloads, power, architecture, and controller. Progress<br />
has already been made, with a modeling and simulation demonstration and an Input/Output (IO)<br />
Specification Build V1 planned for 2012.<br />
41