Urology & Kidney Disease News - Cleveland Clinic
Urology & Kidney Disease News - Cleveland Clinic
Urology & Kidney Disease News - Cleveland Clinic

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
26 <strong>Urology</strong> & <strong>Kidney</strong> <strong>Disease</strong> <strong>News</strong><br />
Robotic and Laparoscopic<br />
Robotic Surgery Through Natural Body Orifices continued from page 25<br />
10 radical nephrectomies. A single port with 3-cannula was<br />
inserted into a 2.5 cm umbilical skin incision.<br />
Subsequently, a vaginal port was placed through the vagina<br />
under laparoscopic monitoring. The robot telescope and<br />
the first robotic arm were placed through the umbilical<br />
single port, and the second robotic arm was placed through<br />
the vagina.<br />
For dismembered pyeloplasty, the ureteropelvic junction<br />
was transected and the ureter was spatulated. Using robotic<br />
needle drivers, the anastomosis was performed with two 5-0<br />
running sutures. Radical nephrectomy was performed after<br />
completing the pyeloplasty on the same kidney then<br />
extracted transvaginally.<br />
The animal was flipped to the opposite lateral flank position<br />
for partial nephrectomy. Renal hilum was controlled<br />
with bulldog clamps and partial nephrectomy was performed<br />
using cold scissors. Renorrhaphy was performed<br />
using robotic needle drivers with sutures cinched over a<br />
surgical bolster.<br />
All 30 robotic NOTES procedures were performed successfully.<br />
Mean operative time was 154 minutes and mean<br />
estimated total blood loss was 72 cc. Mean warm ischemia<br />
time in the partial nephrectomy group was 25.4 min. There<br />
were no intraoperative complications. There were no<br />
robotic system failures during the entire experiment.<br />
In our study, we inserted a robotic arm through a vaginal<br />
port. Vaginal access allowed a full range of motion for the<br />
robotic arm. It minimized clashing between robotic instru-<br />
Surgical Outcomes<br />
Number of porcine/Total number of procedures 10/30<br />
Mean size of umbilical incision cm (range) 2.55 (2.4 – 2.9)<br />
Mean operative time min (range)<br />
Preparation (n = 10) 20.4 (16 – 30)<br />
Pyeloplasty (n = 10) 41.7 (37 – 50)<br />
Suturing time 24.3 (19 – 28)<br />
Partial nephrectomy (n = 10) 59.5 (52 – 70)<br />
Warm ischemia time 25.4 (22 – 30)<br />
Radical nephrectomy (n = 10) 32.1 (27 – 45)<br />
Total surgery time per animal 153.7 (136 – 285)<br />
Mean estimated blood loss cc (range)<br />
Pyeloplasty (n = 10) 19.5 (10 – 35)<br />
Partial nephrectomy (n = 10) 39.8 (30 – 60)<br />
Radical nephrectomy (n = 10) 13.0 (10 – 20)<br />
Total surgery 72.3 (55 – 95)<br />
Complications None<br />
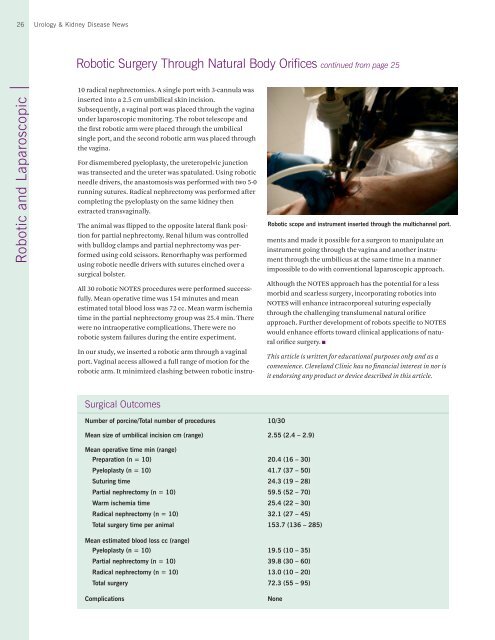
Robotic scope and instrument inserted through the multichannel port.<br />
ments and made it possible for a surgeon to manipulate an<br />
instrument going through the vagina and another instrument<br />
through the umbilicus at the same time in a manner<br />
impossible to do with conventional laparoscopic approach.<br />
Although the NOTES approach has the potential for a less<br />
morbid and scarless surgery, incorporating robotics into<br />
NOTES will enhance intracorporeal suturing especially<br />
through the challenging translumenal natural orifice<br />
approach. Further development of robots specific to NOTES<br />
would enhance efforts toward clinical applications of natural<br />
orifice surgery.<br />
This article is written for educational purposes only and as a<br />
convenience. <strong>Cleveland</strong> <strong>Clinic</strong> has no financial interest in nor is<br />
it endorsing any product or device described in this article.