
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Observers<br />
User 1<br />
Control<br />
Video &<br />
Status<br />
Video &<br />
Status<br />
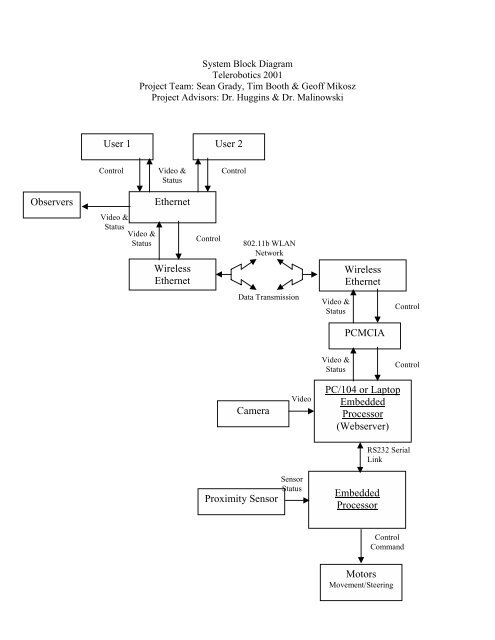
<strong>System</strong> <strong>Block</strong> <strong>Diagram</strong><br />
Telerobotics 2001<br />
Project Team: Sean Grady, Tim Booth & Geoff Mikosz<br />
Project Advisors: Dr. Huggins & Dr. Malinowski<br />
Video &<br />
Status<br />
Ethernet<br />
Wireless<br />
Ethernet<br />
Control<br />
User 2<br />
Control<br />
802.11b WLAN<br />
Network<br />
Data Transmission<br />
Camera<br />
Proximity Sensor<br />
Video<br />
Sensor<br />
Status<br />
Video &<br />
Status<br />
Video &<br />
Status<br />
Wireless<br />
Ethernet<br />
PCMCIA<br />
PC/104 or Laptop<br />
Embedded<br />
Processor<br />
(Webserver)<br />
Embedded<br />
Processor<br />
RS232 Serial<br />
Link<br />
Control<br />
Command<br />
Motors<br />
Movement/Steering<br />
Control<br />
Control
Component Description<br />
Users The users are the ones that control the robots remotely to play<br />
the game. They control the robots via the JAVA based controls<br />
on the webpage. Current video and robot status are sent to<br />
them.<br />
Observers Observers are allowed to watch the progression of the game.<br />
Ethernet The ethernet is used to route signals to the users and observers.<br />
It is mode independent, the server will always be listening for a<br />
new user connection.<br />
WLAN A wireless LAN using the IEEE 802.11b standard will be used to<br />
send and receive information between the users and the remote<br />
servers. (Mode independent) 802.11b is a high rate amendment<br />
to the original 802.11 standard that adds the speeds of 5.5Mbps<br />
and 11Mbps.<br />
PCMCIA PCMCIA will be used to help interface the WLAN to the PC104.<br />
(Mode independent) PCMCIA (Personal Computer Memory<br />
Card International Association) is a format that allows<br />
compatibility between the WLAN card and the PC104 platform.<br />
Video & Status Video feed from the webcam lets the users and observers see<br />
where the robots are. A robot status indicator lets them know if<br />
the status of the game, IR sensor, proximity sensor, and battery.<br />
The video signal will always be transmitted regardless of current<br />
mode.<br />
Control Signal The control signal coming from the users tell the robots what to<br />
do. The users do this by using the JAVA based control panel on<br />
the webpage. Control signals are mode independent, a new user<br />
PC/104 or Laptop Embedded<br />
Processor<br />
could logon at any time.<br />
Runs the web server and handles all internet control functions.<br />
When there are no users connected, this computer handles the<br />
“sleep” mode in which the robot monitors its internal power and<br />
recharges if necessary.<br />
Robot Embedded Processor Handles all robot specific functions such as sensing and<br />
movement. Mode independent, waits for commands from the<br />
user I/O or other control functions on<br />
Camera Sends current picture of the robots surroundings to the user.<br />
(Mode independent)<br />
Proximity Sensor Detects if another robot or object is nearby. (Mode independent)<br />
Motors Steer and move the robot around the environment. (Mode<br />
independent)
User #2<br />
Flowchart<br />
W ait for user 1<br />
power down/stand-by<br />
NO<br />
User 1<br />
Input/ Output<br />
Want to<br />
Play?<br />
YES<br />
Start Camera<br />
Wake fromStandby mode<br />
Display Camera View<br />
Still playing?<br />
Battery<br />
Low?<br />
YES<br />
Monitor Sensors, IR's<br />
Check Battery S tatus<br />
One or Two player<br />
User inputs<br />
IR<br />
Tagged?<br />
NO<br />
NO<br />
Internet<br />
Wireless Connection<br />
YES<br />
Webmaster<br />
YES<br />
NO<br />
Move the<br />
robot?<br />
YE S<br />
Start Camera<br />
Game Over<br />
Find Battery<br />
charging station<br />
Standby until battery<br />
reaches 50%<br />
Display Camera View<br />
Power up robot<br />
for movement<br />
NO<br />
Program the<br />
robot?<br />
YES<br />
Webmaster Program<br />
Window<br />
EXIT<br />
NO<br />
Power down<br />
robot.