Quantifying and visualizing non-Euclidean geometries
Quantifying and visualizing non-Euclidean geometries
Quantifying and visualizing non-Euclidean geometries

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
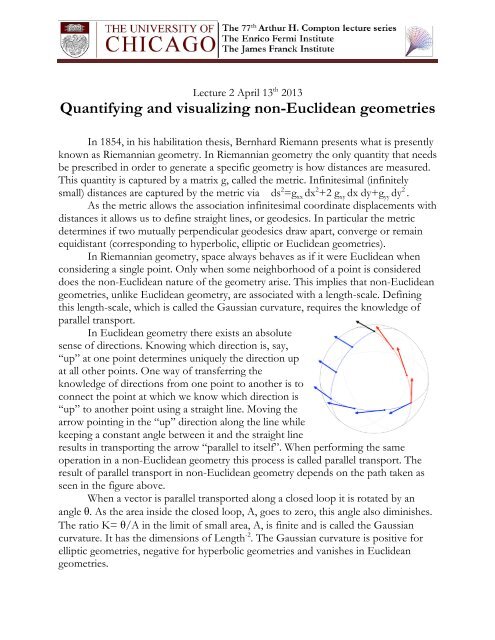
Lecture 2 April 13 th 2013<br />
<strong>Quantifying</strong> <strong>and</strong> <strong>visualizing</strong> <strong>non</strong>-<strong>Euclidean</strong> <strong>geometries</strong><br />
In 1854, in his habilitation thesis, Bernhard Riemann presents what is presently<br />
known as Riemannian geometry. In Riemannian geometry the only quantity that needs<br />
be prescribed in order to generate a specific geometry is how distances are measured.<br />
This quantity is captured by a matrix g, called the metric. Infinitesimal (infinitely<br />
small) distances are captured by the metric via ds 2 =g xx dx 2 +2 g xy dx dy+g yy dy 2 .<br />
As the metric allows the association infinitesimal coordinate displacements with<br />
distances it allows us to define straight lines, or geodesics. In particular the metric<br />
determines if two mutually perpendicular geodesics draw apart, converge or remain<br />
equidistant (corresponding to hyperbolic, elliptic or <strong>Euclidean</strong> <strong>geometries</strong>).<br />
In Riemannian geometry, space always behaves as if it were <strong>Euclidean</strong> when<br />
considering a single point. Only when some neighborhood of a point is considered<br />
does the <strong>non</strong>-<strong>Euclidean</strong> nature of the geometry arise. This implies that <strong>non</strong>-<strong>Euclidean</strong><br />
<strong>geometries</strong>, unlike <strong>Euclidean</strong> geometry, are associated with a length-scale. Defining<br />
this length-scale, which is called the Gaussian curvature, requires the knowledge of<br />
parallel transport.<br />
In <strong>Euclidean</strong> geometry there exists an absolute<br />
sense of directions. Knowing which direction is, say,<br />
“up” at one point determines uniquely the direction up<br />
at all other points. One way of transferring the<br />
knowledge of directions from one point to another is to<br />
connect the point at which we know which direction is<br />
“up” to another point using a straight line. Moving the<br />
arrow pointing in the “up” direction along the line while<br />
keeping a constant angle between it <strong>and</strong> the straight line<br />
results in transporting the arrow “parallel to itself”. When performing the same<br />
operation in a <strong>non</strong>-<strong>Euclidean</strong> geometry this process is called parallel transport. The<br />
result of parallel transport in <strong>non</strong>-<strong>Euclidean</strong> geometry depends on the path taken as<br />
seen in the figure above.<br />
When a vector is parallel transported along a closed loop it is rotated by an<br />
angle θ. As the area inside the closed loop, A, goes to zero, this angle also diminishes.<br />
The ratio K= θ/A in the limit of small area, A, is finite <strong>and</strong> is called the Gaussian<br />
curvature. It has the dimensions of Length -2 . The Gaussian curvature is positive for<br />
elliptic <strong>geometries</strong>, negative for hyperbolic <strong>geometries</strong> <strong>and</strong> vanishes in <strong>Euclidean</strong><br />
<strong>geometries</strong>.
The two dimensional surface of a sphere, together with the notions of lengths<br />
endowed from the ambient three dimensional <strong>Euclidean</strong> space, give rise to an elliptic<br />
geometry. In general we can realize the lengths prescribed by a given two-dimensional<br />
metric as a surface. The surface is called an isometric embedding of the metric, or a<br />
realization of the metric. For a given geometry there might be many different<br />
realizations as surfaces.<br />
A quantity called the second fundamental form describes how curved a given<br />
surface is. At every point on the surface <strong>and</strong> at every direction we may fit the surface<br />
with a circle or radius R (directed along that direction), whose center lies on the<br />
normal to the surface. The k=1/R is called the normal curvature along that direction.<br />
The principal curvatures, k 1 <strong>and</strong> k 2, are the maximal <strong>and</strong> minimal values of the normal<br />
curvature. Their values describe how curved a surface is. If both curvatures share the<br />
same sign their circles lie on the same side of the surface <strong>and</strong> the surface is “bowllike”<br />
at that point. If the curvatures have opposite signs the surface they describe is<br />
saddle like. A remarkable result, which goes by the name “Gauss’ theorema<br />
egregium”, states that the product of the two principal curvatures is no other than the<br />
Gaussian curvature, which can be determined from the metric alone, k 1k 2=K. This<br />
implies that there is a close relation between the metric of a surface <strong>and</strong> the shapes<br />
that surfaces realizing this metric may assume in space.<br />
There are two ways of trying to visualize<br />
<strong>non</strong>-<strong>Euclidean</strong> geometry. The first is to assign a<br />
<strong>non</strong>-<strong>Euclidean</strong> metric to a given domain, <strong>and</strong><br />
examine how straight lines behave. Poincare’s<br />
disk model (which in fact is due to Beltrami) is<br />
such an example. A specific hyperbolic metric is<br />
prescribed on a disk. Straight lines are diameters<br />
in the disk <strong>and</strong> circle segments that meet the<br />
disk’s boundary perpendicularly. Line segments near the boundary correspond to<br />
longer lengths then the segments situated closer to the center of the disc. In the image<br />
to the right the Poincare disk is plotted along with some geodesics. This model<br />
underlies Escher’s series of wood-cuts named the circle limits. Above we show circle<br />
limit IV.<br />
The other way of making sense of <strong>non</strong>-<strong>Euclidean</strong><br />
geometry is to realize the geometry by a surface. The<br />
paper cuts from last week, which essentially use the<br />
prescription of geodesic curvature to generate a desired<br />
geometry, are such an example. The mathematician Daina<br />
Taimina provided us with a more elegant (<strong>and</strong> durable)<br />
example by crocheting a disk with hyperbolic geometry.