- Page 1 and 2: test.col.pp4 University of Maryland
- Page 3 and 4: test.col.pp4 ARAMIS Telerobotics St
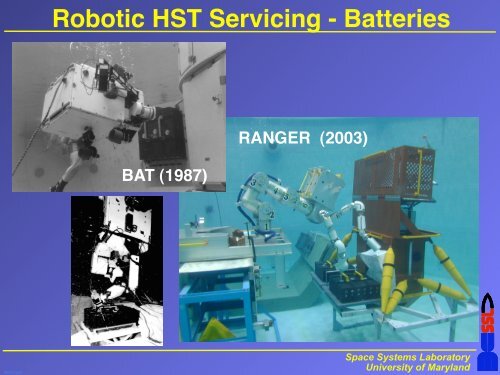
- Page 5 and 6: test.col.pp4 Beam Assembly Teleoper
- Page 7 and 8: test.col.pp4 Ranger Telerobotic Fli
- Page 9 and 10: test.col.pp4 Ranger Neutral Buoyanc
- Page 11: test.col.pp4 SSL Relevant Experienc
- Page 15 and 16: test.col.pp4 Dexterous Arm Design O
- Page 17 and 18: test.col.pp4 Dexterous Manip System
- Page 19 and 20: test.col.pp4 Wrist Roll Drive (aft)
- Page 21 and 22: test.col.pp4 φ (deg) 1080 720 (deg
- Page 23 and 24: test.col.pp4 Inner Wrist (Exploded
- Page 25 and 26: Bearing Installed Directly in Housi
- Page 27 and 28: test.col.pp4 Dexterous Arm Paramete
- Page 29 and 30: test.col.pp4 Design Loads (continue
- Page 31 and 32: test.col.pp4 Singularity Avoidance
- Page 33 and 34: test.col.pp4 Interchangeable End-Ef
- Page 35 and 36: test.col.pp4 IEEM Exploded View Spa
- Page 37 and 38: test.col.pp4 State 2: Manipulator E
- Page 39 and 40: test.col.pp4 State 5: Disengage Too
- Page 41 and 42: test.col.pp4 Schematic of IEEM Bear
- Page 43 and 44: test.col.pp4 Tool Drives • Tool D
- Page 45 and 46: test.col.pp4 Bare Bolt Drive RTSX E
- Page 47 and 48: test.col.pp4 Microconical End Effec
- Page 49 and 50: test.col.pp4 • Interfaces APFR Pa
- Page 51 and 52: test.col.pp4 Task Interfaces - APFR
- Page 53 and 54: Design Requirements • Control ele
- Page 55 and 56: Inner Housing Absolute Encoder test
- Page 57 and 58: test.col.pp4 Components: Harmonic D
- Page 59 and 60: test.col.pp4 Components: Incrementa
- Page 61 and 62: test.col.pp4 Components: Absolute E
- Page 63 and 64:
test.col.pp4 Components: V-Clamp 40
- Page 65 and 66:
test.col.pp4 PXL Underwater Operati
- Page 67 and 68:
test.col.pp4 Ground Control Station
- Page 69 and 70:
test.col.pp4 Flight Control Station
- Page 71 and 72:
test.col.pp4 • Power GCS Services
- Page 73 and 74:
test.col.pp4 GCS Components: Ops Co
- Page 75 and 76:
test.col.pp4 Predictive and Command
- Page 77 and 78:
test.col.pp4 Commanded and Predicti
- Page 79 and 80:
45 35 25 15 5 -5 test.col.pp4 Erron
- Page 81 and 82:
test.col.pp4 Summary Control Scheme
- Page 83 and 84:
test.col.pp4 60 50 40 30 20 10 0 No
- Page 85 and 86:
test.col.pp4 Overall Ranking of Eff
- Page 87 and 88:
test.col.pp4 Conclusions (1 of 2)
- Page 89 and 90:
Future Research • Reevaluate ster
- Page 91 and 92:
test.col.pp4 How the Robot Interact
- Page 93 and 94:
Engineering Arm Performing HST ECU
- Page 95 and 96:
test.col.pp4 Impact of Ranger-class
- Page 97 and 98:
test.col.pp4 Results of Robot Dexte
- Page 99 and 100:
test.col.pp4 HERCULES (Single Arm;
- Page 101 and 102:
HERCULES (Dual Arm; EVA Operations)
- Page 103 and 104:
test.col.pp4 Estimates of Relative
- Page 105 and 106:
test.col.pp4 HERCULES Proof-of-Conc
- Page 107 and 108:
test.col.pp4 SM4R(obotic) Concept O
- Page 109 and 110:
test.col.pp4 Dexterous Robotics - R
- Page 111 and 112:
test.col.pp4 Servicing Option 2 •
- Page 113 and 114:
test.col.pp4 Modifications to Exist
- Page 115 and 116:
test.col.pp4 Launch Vehicle Conside
- Page 117 and 118:
test.col.pp4 Assumptions: • 300 m
- Page 119 and 120:
test.col.pp4 Why SM4R? • No other
- Page 121 and 122:
test.col.pp4 Ranger on SMV Space Sy