PDF - University of Maryland
PDF - University of Maryland
PDF - University of Maryland

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
test.col.pp4<br />
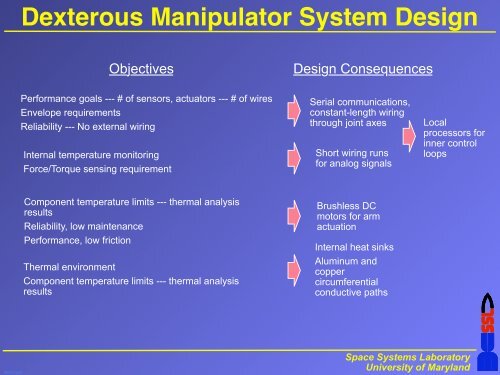
Dexterous Manipulator System Design<br />
Objectives Design Consequences<br />
Performance goals --- # <strong>of</strong> sensors, actuators --- # <strong>of</strong> wires<br />
Envelope requirements<br />
Reliability --- No external wiring<br />
Internal temperature monitoring<br />
Force/Torque sensing requirement<br />
Component temperature limits --- thermal analysis<br />
results<br />
Reliability, low maintenance<br />
Performance, low friction<br />
Thermal environment<br />
Component temperature limits --- thermal analysis<br />
results<br />
Serial communications,<br />
constant-length wiring<br />
through joint axes<br />
Short wiring runs<br />
for analog signals<br />
Brushless DC<br />
motors for arm<br />
actuation<br />
Internal heat sinks<br />
Aluminum and<br />
copper<br />
circumferential<br />
conductive paths<br />
Local<br />
processors for<br />
inner control<br />
loops<br />
Space Systems Laboratory<br />
<strong>University</strong> <strong>of</strong> <strong>Maryland</strong>