

Grex Project
Grex Project
Grex Project

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3.2 Team Initialization Process<br />
The first active part of the Team Handler builds the Initialization Process. Within these routines a first<br />
level of cooperative coordination is realized which is controlled from the Team Handler of the leading<br />
vehicle. Like the other critical parts of the presented structure the single steps of the initialization are<br />
predefined and implemented as state machine.<br />
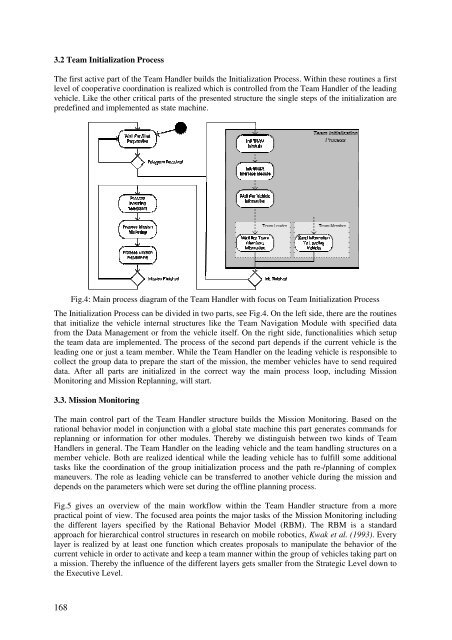
Fig.4: Main process diagram of the Team Handler with focus on Team Initialization Process<br />
The Initialization Process can be divided in two parts, see Fig.4. On the left side, there are the routines<br />
that initialize the vehicle internal structures like the Team Navigation Module with specified data<br />
from the Data Management or from the vehicle itself. On the right side, functionalities which setup<br />
the team data are implemented. The process of the second part depends if the current vehicle is the<br />
leading one or just a team member. While the Team Handler on the leading vehicle is responsible to<br />
collect the group data to prepare the start of the mission, the member vehicles have to send required<br />
data. After all parts are initialized in the correct way the main process loop, including Mission<br />
Monitoring and Mission Replanning, will start.<br />
3.3. Mission Monitoring<br />
The main control part of the Team Handler structure builds the Mission Monitoring. Based on the<br />
rational behavior model in conjunction with a global state machine this part generates commands for<br />
replanning or information for other modules. Thereby we distinguish between two kinds of Team<br />
Handlers in general. The Team Handler on the leading vehicle and the team handling structures on a<br />
member vehicle. Both are realized identical while the leading vehicle has to fulfill some additional<br />
tasks like the coordination of the group initialization process and the path re-/planning of complex<br />
maneuvers. The role as leading vehicle can be transferred to another vehicle during the mission and<br />
depends on the parameters which were set during the offline planning process.<br />
Fig.5 gives an overview of the main workflow within the Team Handler structure from a more<br />
practical point of view. The focused area points the major tasks of the Mission Monitoring including<br />
the different layers specified by the Rational Behavior Model (RBM). The RBM is a standard<br />
approach for hierarchical control structures in research on mobile robotics, Kwak et al. (1993). Every<br />
layer is realized by at least one function which creates proposals to manipulate the behavior of the<br />
current vehicle in order to activate and keep a team manner within the group of vehicles taking part on<br />
a mission. Thereby the influence of the different layers gets smaller from the Strategic Level down to<br />
the Executive Level.<br />
168




