

Grex Project
Grex Project
Grex Project

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Due to the fact that within GREX the presented solution is one of the first realizations for such kind of<br />
team handling structure and also for vehicle security reasons, only one replanning command is<br />
executed at the same time. Furthermore every order which is send gets a unique identifier that has to<br />
be in the reply message. Depending on the priority of a replanning it is possible that an order will be<br />
denied by the vehicle, e.g. a speed adaptation. A decline of course changes or high priority commands<br />
will end up with a global mission abort realized through an internal message to the Mission<br />
Monitoring component.<br />
Fig.6: Main process diagram of the Team Handler with focus on Mission Replanning<br />
4. Simulation Environment and first results<br />
This external software package provides all data and functionalities which are necessary to simulate<br />
an environment for test purposes from a team handling point of view. It includes e. g. the height above<br />
sea ground, the surrounding sea current or the communication delay as well as data loss as result of<br />
the acoustic underwater communication. Furthermore the Simulation Environment is able to emulate<br />
sensors of a vehicle by calculating the distance to static or dynamic objects like gas concentrations.<br />
Due to the usage of the mentioned data, the GREX simulation software is able to execute missions<br />
with multiple vehicles close to reality.<br />
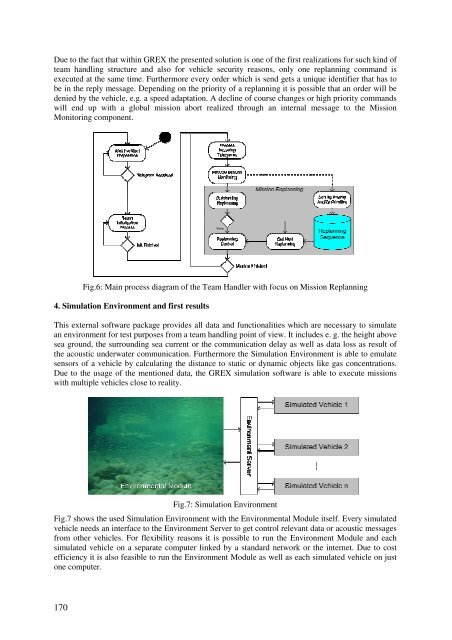
Fig.7: Simulation Environment<br />
Fig.7 shows the used Simulation Environment with the Environmental Module itself. Every simulated<br />
vehicle needs an interface to the Environment Server to get control relevant data or acoustic messages<br />
from other vehicles. For flexibility reasons it is possible to run the Environment Module and each<br />
simulated vehicle on a separate computer linked by a standard network or the internet. Due to cost<br />
efficiency it is also feasible to run the Environment Module as well as each simulated vehicle on just<br />
one computer.<br />
170




