Curl-Curl-Eigenvalue Equation - Institut für Allgemeine ...
Curl-Curl-Eigenvalue Equation - Institut für Allgemeine ...
Curl-Curl-Eigenvalue Equation - Institut für Allgemeine ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
j ≡ 0<br />
S<br />
<strong>Curl</strong>-<strong>Curl</strong>-<strong>Eigenvalue</strong> <strong>Equation</strong><br />
σ = 0, ε, µ real loss-free<br />
( no current excitation)<br />
( )<br />
M CM <br />
Ce = ω e<br />
−1 2<br />
ε<br />
−1<br />
µ<br />
ε<br />
eigenvalue problem<br />
Ax = λx<br />
A = M CM C<br />
−1<br />
CC ε µ −1<br />
<br />
curl µ curl E = ω E<br />
−1 -1 2<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
For the special case where no exciting currents and no conducting materials<br />
(σ = 0) are present and all materials are loss-free (ε, µ real) the discrete wave equation<br />
of FIT resultss in the equation displayed above.<br />
This is an algebraic eigenvalue problem of the form Ax = λx.<br />
The solutions of such kind of equations are non-trivial eigenvalues x j ≠0 and the<br />
according real or complex eigenvalues λ j.<br />
A matrix of dimension n has maximally n linear independent eigensolutions.<br />
The eigenvalue problem is called discrete <strong>Curl</strong>-<strong>Curl</strong>-eigenvalue equation. It´s<br />
system matrix is denoted as A CC . The <strong>Curl</strong>-<strong>Curl</strong>-eigenvalues equation corresponds to<br />
the continuous eigenvalue equation for resonators.
<strong>Curl</strong>-<strong>Curl</strong>-<strong>Eigenvalue</strong> <strong>Equation</strong><br />
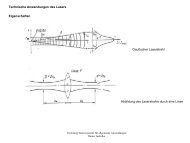
1/2<br />
Use transformation e' = Mε<br />
e to derive an equation with<br />
symmetric system matrix<br />
<br />
<br />
M CM CM <br />
e'<br />
= e'<br />
1/2 −1/2 2<br />
ε −1<br />
ε<br />
ω<br />
µ<br />
system matrix<br />
1/2 −1/2<br />
A'<br />
= Mε<br />
ACC<br />
Mε<br />
= M CM CM<br />
=<br />
−1/2 −1/2<br />
ε<br />
µ −1<br />
ε<br />
−1/2 −1/2 −1/2 −1/2<br />
( Mε<br />
CM <br />
µ )( Mε<br />
CM <br />
µ )<br />
T<br />
is symmetric<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
<strong>Eigenvalue</strong>s of both equations are the quadratic resonance frequencies ω 2 and the<br />
eigenvectors correspond each to the fields of the according resonator modes.<br />
Now we can study the properties of the FIT discretization by analyzing the algebraic<br />
properties of the system matrix A CC .<br />
In the actual form of the curl-curl-eigenvalue equation the matrix A CC is nonsymmetric.<br />
Yet, using the transformation given above for the electric grid voltage we receive the<br />
above formulation with real symmetric system matrix A’. The eigenvalues of A CC and<br />
A’ are identical.
Solution Space of <strong>Eigenvalue</strong> Problem<br />
λ = ω ≥ 0 ∀ λ = eigenvalue of A '<br />
2<br />
i i i<br />
Consistency between mathematical model and physics is based upon<br />
T<br />
• Symmetry of the curl operators: C<br />
= C<br />
• Possibility to split the material operators:<br />
M = M M and M = M M<br />
ε<br />
1/2 1/2 1/2 1/2<br />
ε ε<br />
µ<br />
µ µ<br />
(real diagonal matrices with non-negative entries)<br />
Consider<br />
<br />
SC <br />
M C e = ω S <br />
M e = ω S<br />
d = 0<br />
2 2<br />
−<br />
µ 1 ε<br />
= 0<br />
<br />
⇒ either ω = 0 or Sd = 0<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
The solutions of the discrete eigenvalue equation are not only of interest if we directly want to<br />
determine the oscillating modes in resonators but they also hold information about the behaviour<br />
of time-variable fields obtained by FIT-discretization.<br />
Using purely algebraic reasoning we can get information about the location of the eigenvalues:<br />
Because of it´s symmetry the matrix A’ (and thus also A CC ) has purely real eigenvalues. From it´s<br />
representation as product of two matrices transposed to each other it also follows that all<br />
eigenvalues are non-negative (A’ is positive semi-definite).<br />
Thus, also the eigenfrequencies ω j are real and non-negative. This corresponds to the physical<br />
property that loss-free resonators have real eigenfrequencies, only.<br />
This consistency between the mathematical model and physics is not self-evident. In this case it is<br />
based on the properties of<br />
• the symmetry of the discrete curl-operators of FIT,<br />
• the possibility to decompose the material operators because they are real diagonal matrices with<br />
non-negative entries.<br />
A further hint about the solution space of the eigenvalue problem can be obtained by the following<br />
physical consideration: If we multiply the curl-curl-eigenvalue equation from left by M ε and build<br />
the divergence next (multiplying from left the discrete divergence operator) we get the equation<br />
displayed above. This means that for all eigensolutions either the eigenfrequency ω or the<br />
divergence of the electric flux density have to vanish.
Solution Space of <strong>Eigenvalue</strong> Problem<br />
Solution space L<br />
can be decomposed:<br />
L= L<br />
S<br />
∪ L<br />
d<br />
2 2<br />
ω = 0 ω ≠0<br />
1. Subspace LS<br />
of electrostatic solutions with ω = 0 :<br />
<br />
i potential approach: E = − grad ϕ and e =− −<br />
Φ<br />
(<br />
)<br />
T<br />
( S )<br />
T<br />
T<br />
i because of curl grad = 0 and CS<br />
= SC = 0<br />
<br />
<br />
⇒ curl E = 0 and Ce = 0<br />
S<br />
⇒ ω = 0<br />
<br />
i in general: div D ≠0 and<br />
S<br />
S<br />
S<br />
<br />
Sd ≠0<br />
S<br />
S<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
The solution space L of the <strong>Curl</strong>-<strong>Curl</strong>-eigenvalue equation thus can be split into two disjoint<br />
subspaces: L S is the space of static solutions since it holds all eigensolutions λ=ω²=0.<br />
L d is the space of dynamic solutions which all have resonance frequencies above zero and thus<br />
correspond to harmonic oscillating fields.<br />
1. For the eigenvectors, i.e. the discrete field vectors, of both solution classes we find, using the<br />
properties of FIT – discretization:<br />
Electrostatic fields with ω=0:<br />
Such fields may be represented as gradient of a scalar potential. Because of curl grad=0<br />
the curl of the electric field and electric grid voltage is vanishing for these modes. Inserting this<br />
into the curl-curl-eigenvalue equations we obtain ω=0 as it should be.<br />
In a grid of N P points there exist about N p linear independent potential vectors ϕ and thus about N P<br />
linear independent static eigenmodes (ignoring points with fixed potential, as e.g. at the boundary).<br />
This means that the eigenvalue λ=0 is (about) N P -fold degenerate.<br />
In general, the potential distribution does not fulfil the Laplace equation such that we need to<br />
assume charges in the grid points for the existence of such solutions. This means that the<br />
divergence of the flux density is not equal to zero.<br />
Note: In problems with multiple conductors (structures with several disjoint ideal conductors),<br />
there exist also some modes with ω=0 which are divergence- and curl-free. We will not treat these<br />
cases here.
Solution Space of <strong>Eigenvalue</strong> Problem<br />
2. Subspace L of dynamic solutions with ω ≠ 0 :<br />
d<br />
i from Faraday's law we have:<br />
<br />
<br />
D5 ≠ 0<br />
<br />
curl E ≠0 and Ce ≠0<br />
d<br />
i from Ampere's law we get:<br />
1 1 <br />
Dd = curl Hd and dd = Ch <br />
d<br />
jω<br />
jω<br />
i because of div curl = 0 and SC =<br />
0 we have<br />
<br />
<br />
div = 0 and Sd = 0<br />
D d d<br />
L= L<br />
S<br />
∪ L<br />
d<br />
2 2<br />
ω = 0 ω ≠ 0<br />
d<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Dynamic eigen-oscillations with ω≠0: According to Faraday´s induction law these modes<br />
possess a non- vanishing curl-contribution.<br />
The corresponding electric grid flux can be represented with help of Ampère´s law. Because of<br />
div curl=0 the dynamic modes are divergence – free.<br />
The exact separation of both subspaces with the provable curl-and divergence-freeness of the<br />
corresponding modes thus holds in the discrete case just because the matrix operators fulfil the<br />
necessary conditions. This is not at all self-evident and for some other discretization methods it<br />
does not hold!<br />
According to our previous considerations, the eigenvalue problem of dimension 3N P has the<br />
about N P – fold degenerated eigenvalue ω² = 0 and only about 2N p non-zero eigenvalues.<br />
The static modes, however, are meaningful solutions of Maxwell´s equations if and only if the<br />
charge distribution which results from div D s ≠ 0 is allowed for the solution domain. Since this<br />
is generally not the case as usually div D = 0 is assumed for harmonic problems our system<br />
matrix turns out to be „too large“ by about 1/3.
Solution Space of <strong>Eigenvalue</strong> Problem<br />
Im{ λ}<br />
N-fold eigenvalue 0 (static solutions)<br />
2 2<br />
2 Re<br />
ω 1<br />
ω<br />
2<br />
… ω<br />
{ λ}<br />
2 N<br />
smallest (non-zero) eigenvalue = fundamental oscillation<br />
Symmetry and positive semi-definiteness of A'<br />
⇒ orthogonality of the modes:<br />
<br />
e' ⋅ e' = 0 ∀i, j withλ ≠λ<br />
i j i j<br />
Orthogonality condition after back-transformation:<br />
<br />
ei⋅ Mεej = 0 and ei⋅ d<br />
j<br />
= 0 ( i ≠ j)<br />
4 x stored electric energy (non-zero only for i = j)<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Consequently, we should search for some transformation which reduces the dimension of the<br />
system matrix from 3N P to 2N P . Building in the discrete Gauss law for electricity with<br />
vanishing right hand side (no charges) would yield such a transformation but destroy the<br />
band structure of the matrix affording higher computational effort for it´s storage.<br />
Instead of this it is more elegant to control the static modes by a modified formulation of the<br />
wave equation and/or by specific algebraic solution methods which will be treated later.<br />
Another property of the solution of the <strong>Curl</strong>-<strong>Curl</strong> matrix A´. For two eigenvectors, each, of<br />
this matrix orthogonality holds if the corresponding eigenvalues are not equal to each other.<br />
Hence, orthogonality holds for all pairs of non-degenerated modes – also for each pair build<br />
by one dynamic and one static mode. For degenerated dynamic modes (with λ i =λ j ≠0)<br />
orthogonal linear combinations can always be found.<br />
After back-transformation from A` to A cc we obtain the orthogonality relation for dynamic<br />
eigenmodes given above.<br />
The scalar product of the vectors of electric grid voltage and electric grid flux formally<br />
corresponds to four times of the stored electric energy which is non-vanishing only if both<br />
vectors belong to the same field.
Grid Dispersion <strong>Equation</strong><br />
Plane waves:<br />
j( t k r)<br />
E = E e ω − <br />
⋅<br />
0<br />
2<br />
2 2 2 2 ω<br />
Dispersion equation: k = kx + ky + kz<br />
=<br />
2<br />
c<br />
With<br />
<br />
− jk⋅r<br />
− jk jk<br />
x x − y y − jkz<br />
z<br />
e = e e e<br />
− jk ∆x − jk ∆y<br />
− jkz<br />
∆z<br />
x y z<br />
x<br />
y<br />
T = e , T = e , T = e<br />
we find the phase factor<br />
by which the complex grid voltage is multiplied<br />
when the wave proceeds by one step size in x-, y- or z-direction<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Based on the discrete wave equation we will introduce next the so–called grid dispersion equation<br />
which allows for an extensive analysis of the properties of the Maxwell-Grid-<strong>Equation</strong> (MGE) for timedependant<br />
fields.<br />
The basis for the derivation is Fourier´s theorem according to which each wave may be represented as<br />
sum of elementary waves. In electrical engineering, this theorem is mainly applied to purely timedependant<br />
signals. It may also be applied to space-dependant electromagnetic fields: Then, elementary<br />
waves are fields which can be represented in space and time by harmonic functions, i.e. sine, cosine or<br />
the complex exponential function. Physically, these are just plane waves.<br />
In homogeneous space (vacuum) the plane waves are solution of (continuous) Maxwell´s equations for<br />
which the frequency ω or and the wave number k = |k| fulfil the dispersion equation.<br />
The idea of the following analysis is to check under which conditions plane waves exist on the grid, i.e.<br />
we can derive an according representation for the discrete field vectors which solve the MGE. First, we<br />
will study the time-harmonic case.<br />
In order to eliminate the influence of the boundary conditions we assume an indefinitely large Cartesian<br />
computation grid and equidistant step size in all three coordinate direction, i.e ∆u=∆v=∆w for all i=1,...,<br />
I, j=1,...,J, K=1, ..., K. Further, we assume constant material coefficients ε 0 , µ 0 and σ=0 (vacuum),<br />
Taking the continuous definition of a plane wave we impress the given electric field of the plane wave<br />
into the vector components of the electric grid voltage by evaluation of the corresponding path integral<br />
for each edge in the grid. Then, we find that the complex grid voltage has to be multiplied with the<br />
phase factors given above as the wave proceeds one grid step in x-, y- and z-direction, respectively.<br />
Thus, the complete discrete field vector can be explained by one voltage component per direction in<br />
space which will be denoted as shown here (a hat as sign for the wave amplitudes). As arbitrary origin<br />
for these discrete wave amplitudes we choose the three voltage components associated to some grid<br />
point n 0 (usual indexing).
e<br />
We have<br />
= E<br />
4 z<br />
Grid Dispersion <strong>Equation</strong><br />
Regard Faraday's induction law:<br />
<br />
b<br />
<br />
e = E<br />
⋅T<br />
1 x<br />
3 y z<br />
= B<br />
<br />
e<br />
= E<br />
1 y<br />
<br />
− jωb = e − e + e −e<br />
<br />
1 1 3 2 4<br />
= e1( 1− T z) + e4( − 1+<br />
T y)<br />
x y( ) <br />
z z( y)<br />
<br />
e = E<br />
⋅ T<br />
2 z y<br />
z<br />
x y<br />
and − jω<br />
B = E 1− T + E − 1 + T for the wave amplitudes<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
In the next step we will complete the time derivative of the magnetic flux component<br />
according to Faraday´s induction law for the corresponding grid areas. As we study<br />
the frequency domain, the time derivative is given by multiplication by јω.<br />
With the notations of the sketch we get the relations shown here.
Discrete induction law:<br />
Grid Dispersion <strong>Equation</strong><br />
<br />
<br />
⎛ 0 −( T 1)<br />
1 x<br />
x<br />
z − T y − ⎞⎛E<br />
⎞ ⎛B<br />
⎞<br />
⎜<br />
⎟⎜<br />
⎟ ⎜ ⎟<br />
T 1 0 ( 1)<br />
<br />
<br />
⎜ z<br />
− − T<br />
x<br />
− ⎟⎜Ey⎟=−jω<br />
⎜By⎟<br />
⎜ ( T 1)<br />
1 0 <br />
<br />
y<br />
T ⎟<br />
⎝<br />
− −<br />
x<br />
−<br />
⎠⎜E z ⎟ ⎜B<br />
z ⎟<br />
⎝ ⎠ ⎝ ⎠<br />
C<br />
⎛ ∆x<br />
⎞<br />
⎜<br />
⎟<br />
⎛H<br />
<br />
x ⎞ ⎜<br />
µ ∆y ∆z<br />
⎟ ⎛B<br />
x ⎞<br />
⎜ ⎟<br />
<br />
⎜<br />
∆ y<br />
⎟ ⎜ ⎟<br />
⇒ <br />
⎜H<br />
y⎟=⎜ ⎟ ⎜B<br />
y⎟<br />
x<br />
, etc.<br />
µ z x<br />
H<br />
⎜<br />
∆ ∆<br />
⎟<br />
⎜ <br />
z ⎟ ⎜B<br />
z⎟<br />
⎝ ⎠ ⎜<br />
∆z<br />
⎟ ⎝ ⎠<br />
⎜<br />
µ ∆x∆y⎟<br />
⎝<br />
⎠<br />
∆ x=∆<br />
homogeneous<br />
material<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
M<br />
−1<br />
µ<br />
Thus, for all three directions in space, we obtain a mapping of the discrete induction<br />
law to the 3 x 3 system of equations as displayed above.<br />
So we have determined the magnetic flux components. Next, we can use the material<br />
equations to determine the wave amplitudes of the magnetic grid voltages. The<br />
discrete relation for the simple case of a homogeneous equidistant grid is given here.
Grid Dispersion <strong>Equation</strong><br />
Regard Ampere's law:<br />
1<br />
H<br />
x<br />
T<br />
y<br />
H y<br />
D z<br />
C<br />
<br />
1<br />
H<br />
T<br />
x<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
y<br />
H x<br />
jω<br />
D<br />
Discrete law:<br />
−1 −1<br />
⎛ 0 −( 1−T z ) 1−T ⎞<br />
y ⎛H<br />
<br />
x<br />
⎞ ⎛D<br />
x<br />
⎞<br />
⎜ ⎟ ⎜ ⎟ ⎜ ⎟<br />
⎜ −1 −1<br />
1−T 0 <br />
z<br />
−( 1− T<br />
⎟<br />
x ) ⎜ H y ⎟ = jω<br />
⎜ Dy<br />
⎟<br />
⎜ ⎟ ⎜ −1 −1<br />
<br />
⎜−( 1−T<br />
) 1 0 H z D z<br />
y<br />
−T<br />
⎟⎜ ⎟ ⎟ ⎜ ⎟<br />
x<br />
⎝<br />
⎠⎝ ⎠ ⎝ ⎠<br />
<br />
z<br />
=<br />
( 1 −1 ) 1<br />
( 1<br />
−<br />
T ) <br />
y<br />
H x T<br />
x<br />
H<br />
− − + −<br />
y<br />
Next, we will apply the discrete Ampère´s law to the corresponding dual area as<br />
shown in this sketch. The inverse phase factors in the resulting equation just have the<br />
effect of a displacement in negative coordinate direction.<br />
Again, we can summarize the equations for all three directions in space obtaining the<br />
system of equations given here.<br />
As we can easily verify the system matrices („curl operators“) again fulfil the relation<br />
that the one on the primary grid equals the Hermitian one the dual grid (Hermitian<br />
matrix = transposed plus conjugate complex).
Grid Dispersion <strong>Equation</strong><br />
Electric material matrix:<br />
⎛ ∆x<br />
⎞<br />
⎜<br />
⎟<br />
⎛E<br />
<br />
x ⎞ ⎜ε<br />
∆y<br />
∆z<br />
⎟ ⎛D<br />
x ⎞<br />
⎜ ⎟<br />
<br />
⎜ ∆ y<br />
⎟ ⎜ ⎟<br />
⎜E<br />
<br />
y⎟= ⎜ ⎟ ⎜D<br />
y⎟<br />
ε z x<br />
E<br />
⎜ ∆<br />
∆<br />
⎜ <br />
z ⎟<br />
⎟<br />
⎜D<br />
z<br />
⎜<br />
⎟<br />
⎝ ⎠ ∆z<br />
⎟ ⎝ ⎠<br />
⎜<br />
ε ∆x∆y⎟<br />
⎝<br />
<br />
⎠<br />
−1<br />
M<br />
ε<br />
Amplitude vector:<br />
⎛E<br />
⎞<br />
x<br />
⎜ ⎟<br />
e = ⎜E<br />
⎟<br />
y<br />
⎜E<br />
⎟<br />
⎝<br />
z<br />
⎠<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Finally , the electric material matrix is applied in order to transform the electric grid<br />
fluxes into grid voltages.<br />
Thus we have transformed all equations now to the three-dimensional space of wave<br />
amplitudes.
1<br />
Grid Dispersion <strong>Equation</strong><br />
The local <strong>Curl</strong>-<strong>Curl</strong>-wave equation<br />
−1 H −1<br />
2<br />
Mε<br />
C Mµ<br />
Ce<br />
= ω e<br />
has to hold for e<br />
!<br />
( ) ( )<br />
jx<br />
Using the relation e = cos x + jsin x the lengthy solution<br />
finally yields<br />
λ = 0 (the static solution),<br />
λ<br />
λ<br />
c<br />
2<br />
2<br />
⎛<br />
kx<br />
x ⎛ ⎛ky∆y⎞⎞<br />
⎜<br />
⎛ ⎛ ∆ ⎞⎞ sin<br />
sin<br />
⎛ ⎛kz∆z⎞⎞<br />
⎜ ⎜ ⎟⎟<br />
sin<br />
⎜<br />
⎜ ⎜ ⎟<br />
2<br />
⎟ 2 ⎜ ⎜ ⎟<br />
2<br />
⎟<br />
⎝ ⎠ ⎜ ⎝ ⎠⎟<br />
⎝ ⎠<br />
⎜<br />
⎜ ⎟ ⎜ ⎟<br />
∆x ⎜ ∆y ⎟<br />
∆z<br />
⎜<br />
⎜ 2 ⎟ ⎜ 2 ⎟ ⎜<br />
⎝ ⎠ ⎝ 2 ⎟<br />
⎜<br />
⎝ ⎠<br />
⎠<br />
⎝<br />
2<br />
2<br />
=<br />
3<br />
= + +<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
2<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
Sequentially applying the equations previously derived, a condition may be<br />
formulated under which the discrete plane wave fulfils the Maxwell-Grid-<strong>Equation</strong>s<br />
as demanded before (thus justifying the approach used here). The electric amplitude<br />
vector has to fulfil the local <strong>Curl</strong>-<strong>Curl</strong>-Wave equation.<br />
This is an algebraic 3x3 eigenvalue equation for the electric amplitude vector with<br />
eigenvalue λ=ω². After some lengthy calculation and paying attention to the relation<br />
e jx = cos(x) + j sin (x) one eigenvalue λ 1 =0 and a double eigenvalue λ 2 = λ 3 as given<br />
above are found. The solution λ=ω²=0 is denoted as static solution. It is not regarded<br />
here. The two solutions λ 2,3 ≠0 describe the discrete waves, searched for. The<br />
corresponding two-dimensional space of their eigenvectors indicates the two<br />
polarisation directions of the plane wave.
Grid Dispersion <strong>Equation</strong><br />
The grid dispersion equation<br />
2<br />
2<br />
2<br />
⎛ ⎛ky∆y⎞⎞<br />
z<br />
⎛ ⎛kx∆x⎞⎞ sin<br />
sin<br />
⎛ ⎛k ∆z⎞⎞<br />
⎜ ⎜ ⎟ sin<br />
2<br />
⎟ ⎜ ⎜ ⎟⎟<br />
2 ⎜ ⎜ ⎟<br />
2<br />
⎟ ω<br />
⎜ ⎝ ⎠⎟ ⎛ ⎞<br />
+ ⎜ ⎝ ⎠⎟<br />
+ ⎜ ⎝ ⎠⎟<br />
=<br />
x y z ⎜ ⎟<br />
⎜ ∆ ⎟ ⎜ ∆ ⎟<br />
∆<br />
⎝ c ⎠<br />
⎜ 2 ⎟ ⎜ 2 ⎟ ⎜ 2 ⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ⎠<br />
2<br />
is the condition for the existence of the discrete waves belonging<br />
to the eigenvalues λ ≠ 0.<br />
2,3<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Finally, the condition for the existence of these waves is given as so-called grid<br />
dispersion equation. It connects the properties of the spatial discretization on the left<br />
hand side with the second time derivative of the wave equation which arises as factor<br />
–ω² in frequency domain (the negative sign is compensated by that in Faraday´s<br />
induction law).<br />
The grid dispersion equation fixes how plane waves propagate in the computational<br />
FIT-grid. For example, we can see that the propagation depends on the step size as<br />
well as on the propagation direction. Very important in that is that the grid dispersion<br />
equation tends to the analytic dispersion equation as we build the limits ∆x, ∆y, ∆z,<br />
∆t = 0. This is another proof of the convergence of FIT.<br />
Please note that we used some relevant assumptions on the grid for the derivation<br />
above: an equidistant discretization in all spatial directions, homogeneous material<br />
and no boundary conditions. Nevertheless, the grid dispersion equation is of great<br />
importance for the analysis of FIT´s properties as will get more obvious in the<br />
following chapters.
Solution of the <strong>Eigenvalue</strong> <strong>Equation</strong><br />
−1 2<br />
Loss-free (real ε, σ=0): Mε<br />
CM <br />
µ − 1<br />
C e = ω e<br />
eliminate the N<br />
P<br />
solutions with λi<br />
= 0:<br />
<br />
dynamic modes with: div( ε E) = 0<br />
<br />
T<br />
grad div D = 0 − SSM <br />
ε<br />
e=<br />
0<br />
1/2 1/2 1/2<br />
Transformation e' = e: - M S T SM <br />
e' = 0<br />
M ε ε ε<br />
−<br />
(<br />
<br />
− T<br />
<br />
−1<br />
µ<br />
)<br />
1/2 1/2 1/2 1/2 2<br />
Mε CM CMε + Mε S SMε e <br />
' = ω e'<br />
<br />
-1 1 2<br />
ε µ ε E = ω E<br />
−<br />
( curl curl- grad div )<br />
2<br />
"Nabla-Squared <strong>Eigenvalue</strong> Eq." (curl curl - grad div = - ∇ )<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
The eigenvalue equation of FIT for time-harmonic fields in closed structures (resonators) has<br />
been formulated in the previous chapter. For the loss-free case (real material coefficients and<br />
vanishing conductivity) it is repeated here.<br />
Usually, the dynamic modes with the smallest non-zero eigenvalues λ=ω²≠0 are of technical<br />
interest. As previously found, in this regime the spectrum of the system matrix is determined<br />
by the multiple degenerated eigenvalue λ=0. Since this situation poses great numerical<br />
difficulties for most eigenvalue solvers we will derive an alternative formulation in the<br />
sequel.<br />
Solution methods which search for the smallest eigenvalues and the corresponding<br />
eigenvectors of a matrix would first compute all eigenvalues with ω²=0 and only then they<br />
could compute the fundamental mode as second-smallest eigenvalue.<br />
Therefore, our goal is to eliminate the N P -fold eigenvalue zero in the matrix A CC.<br />
For all dynamic modes searched for we have div (ε E)=0 and the corresponding discrete<br />
equation in grid space. Now we multiply the discrete equation from left with the discrete<br />
gradient operator (continuously, we build the gradient of the left hand side.)<br />
Replacing now the electric grid voltage by its transformed form we find a symmetric form of<br />
the last equation.<br />
Now we subtract this equation from the <strong>Curl</strong>-<strong>Curl</strong>-eigenvalue equation. The resulting<br />
equation is given in the original and in its symmetric form. Also the continuous form is given.
Solution of the <strong>Eigenvalue</strong> <strong>Equation</strong><br />
„Ghostmodes“ in inhomogeneous waveguide<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Because of the vector identity curl curl – grad div = -∇² this equation is also denoted as Nabla-<br />
Squared-<strong>Eigenvalue</strong> equation. Only the dynamic modes are searched for, but not the static fields<br />
(with div D≠0) fulfil this equation.<br />
Since the solution manifold has to be preserved we will study next which solutions replace the<br />
static solutions.<br />
One can show that, again, we obtain two types of solution:<br />
1. eigensolutions with ω² >0, div D=0 and curl E≠0:<br />
These are the modes searched for. (Here, we also count the modes in<br />
multiple conductor systems for which still holds: ω²=0, div D=0, curl<br />
E=0)<br />
2. eigensolutions with ω² >0, div D≠0, curl E=0:<br />
These modes obey to the equation - grad div E=ω² ω µ E and therefore they are no<br />
physically meaningful solutions.<br />
The elimination of the static solutions thus leads to the appearance of unphysical solutions, the socalled<br />
„Ghost Modes“. They always appear when we solve the <strong>Curl</strong>-<strong>Curl</strong>-eigenvalue equation in<br />
the latter form. After the solution of the eigenvalue problem we thus need to distinguish the ghost<br />
modes from the physical dynamic modes.
Solution of the <strong>Eigenvalue</strong> <strong>Equation</strong> (C‘ted)<br />
„Ghostmodes“ in inhomogeneous waveguide<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Numerical approaches and discretization methods which cannot fulfil the relation div<br />
curl=0 on the grid space have no straightforward possibility to distinguish the two<br />
solution types. They often apply the so-called penalty method where the grad divterm<br />
in the eigenvalue equation is weighted by some factor p (penalty factor). After<br />
multiple solution with different values of p the correct (physical) eigensolutions can<br />
be distinguished because they do not show any dependence on p.<br />
With FIT this effort of multiple solution of the eigenvalue problem is not necessary<br />
since the product of the div and curl operator vanishes and thus it is sufficient to<br />
apply the dual divergence operator to the electric grid flux to distinguish the two types<br />
of solution.
Memory Usage<br />
Example:<br />
mesh points:<br />
N =<br />
P<br />
6<br />
10 (double precision: 8 bytes/number)<br />
FIT: 39 bands of entries<br />
N P<br />
(21 have to be stored, symmetry)<br />
⇒ 170 MB (+ some add. vectors)<br />
no band structure:<br />
fill-in-entries by solver (still symmetric!)<br />
⇒<br />
0 .6<br />
2<br />
13<br />
.5 (3N P<br />
) = 3 ∗10 Byte<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Our eigenvalue problem has the dimension N=3 N P and thus also N eigensolutions. The<br />
number N P of grid points may be very large in some applications (up to a few millions) which<br />
involves that a complete solution is generally hardly possible.<br />
In the following, we will describe an iteration method for the solution of such kind of<br />
eigenvalue problems. In the practically interesting case of only a few 10-100 eigenvalues<br />
searched for, this method provides good results with acceptable effort.<br />
All methods described here exploit the fact that the system matrix is very large but sparse: In<br />
the iterative solution of the eigenvalue problem only so-called „matrix-vector-operations“ are<br />
used for which the matrix pattern can directly be exploited for an efficient implementation. In<br />
general, methods which afford a decomposition of the matrix should not be applied since they<br />
destroy the band structure.<br />
As example let us assume a computational grid of N P = 10 6 grid points. According to the<br />
previously found structure the <strong>Curl</strong>-<strong>Curl</strong>-System matrix has 39 bands of length N P where<br />
only 21 of those have to be stored because of symmetry reasons. For a double-precision<br />
calculation we need 8 Byte per floating point number which yields a storage requirement of<br />
about 170 MB. Additionally, we need to store some auxiliary vectors (depends on the solution<br />
method). This is easily affordable on modern PC´s or workstations.<br />
Yet, if we would loose our band structure and would need to store the complete matrix<br />
(because of fill-ins produced by the solution method) we would end up with 0.5* (3N P )² = 4.5<br />
* 10 12 numbers or 3.6 * 10 13 Byte (still for a symmetric matrix!)
von Mises-Iteration<br />
x<br />
A<br />
( 0)<br />
is real symmetric:<br />
( ) 1 2 3 N<br />
Ax = λx dim A = N λ > λ ≥ λ ≥… ≥ λ<br />
filled with random numbers, expressed as linear combination of e:<br />
x<br />
( 0)<br />
N<br />
= ∑αie<br />
i=<br />
1<br />
i<br />
i<br />
Iteration scheme x<br />
( v) ( v−1)<br />
= Ax<br />
leads to:<br />
⎡<br />
⎤<br />
v<br />
N<br />
⎢<br />
N<br />
( v)<br />
v v<br />
⎛λ<br />
⎞ ⎥<br />
i<br />
x = ∑αλ i i<br />
ei = λ1 ⎢α1e1+ ∑⎜ ⎟ αiei⎥<br />
i= 1 ⎢ i=<br />
2⎝λ1<br />
⎠ ⎥<br />
⎢<br />
<br />
⎣<br />
→0forv→∞<br />
⎥⎦<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
As introduction we will study the von Mises method, also called „power iteration“,<br />
to determine a specific solution for an eigenvalue problem of the form<br />
Ax = λx, dim (A) = N.<br />
We assume that the matrix A is real symmetric with eigenvalues<br />
| λ 1 | > | λ 2 | ≥ | λ 3 | ≥ ... ≥ | λ N |.<br />
We search for the (uniquely defined) eigenvalue λ 1 with large absolute value and<br />
the corresponding eigenvector x 1 .<br />
We start with an initial vector x (0) filled with random numbers. Since the<br />
eigenvectors of A build a complete orthogonal system we can represent x (0) as<br />
linear combination of eigenvectors e 1 , ..., e N as displayed above.<br />
Now we use the iteration scheme<br />
x (v) = Ax (v-1)<br />
And get the expression given above.<br />
The iteration converges against the eigenvector e 1 belonging to the eigenvalue λ 1<br />
with larges absolute value.
<strong>Eigenvalue</strong> Solver<br />
Rayleigh-quotient:<br />
( v) ( v)<br />
( v)<br />
x ⋅ Ax ⎛ ⎛ λ<br />
( )<br />
ε<br />
⎞<br />
R x = = λ<br />
( v) ( v)<br />
∞<br />
⎜<br />
∞+Ο⎜ ⎟<br />
x ⋅ x<br />
⎝λ<br />
⎝<br />
∞ ⎠<br />
λ =R<br />
1<br />
( v)<br />
( x )<br />
εv+∞<br />
⎞<br />
⎟<br />
⎠<br />
Normalization during iteration:<br />
( v) ( v−1) ( v)<br />
x = Ax , x =<br />
x<br />
x<br />
( v)<br />
( v)<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
A very good estimation of this eigenvalue can be obtained by the Rayleighquotient<br />
given above.<br />
In order to avoid a fast increase of the vector components of eigenvalues with |<br />
λ i | > 1 during the iteration a normalization is carried out after each step of the<br />
von Mises- iteration.<br />
The vector norm used in the normalization is arbitrary.
Iteration Scheme<br />
1. Choose randomly filled vector<br />
( 0)<br />
x<br />
2. For ν=1,2,3,… build:<br />
( v) ( v−<br />
)<br />
( v)<br />
( v)<br />
( v)<br />
1 ,<br />
3. Build Rayleigh quotient<br />
x<br />
x<br />
= Ax<br />
=<br />
x<br />
x<br />
λ =R<br />
( )<br />
( )<br />
1<br />
x v<br />
4. Repeat step 2-3 until the desired accuracy is reached<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
The complete iteration is given above.
Spectral Shift<br />
The von Mises-iteration yields the eigenvector with largest eigenvalue.<br />
Often the eigenvector corresponding to the smallest eigenvalue is<br />
of special interest.<br />
Define A ' with:<br />
( λ s) ( )<br />
Ax ' = Ax+ sx= + x x: Eigenvector of A<br />
System matrix A' with eigenvectors x, but eigenvalues are shifted:<br />
λ'<br />
= λ + s<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
With the von Mises-iteration in the previous form only the maximal eigenvalue (absolute value)<br />
of a matrix and it´s corresponding eigenvector can be found. Yet, for practical applications just<br />
the smallest eigenvalues are of interest (the fundamental mode of a cavity resonator, e.g.).<br />
By help of a spectral shift the same method can also be used to compute the smallest<br />
eigenvalues of a matrix. To do so the iteration is carried out with the slightly modified matrix<br />
A‘ = A + sI which has the same eigenvectors as A but shifted eigenvalues λ‘= λ + s as<br />
the above given consideration shows.<br />
If the spectrum of A is known in a good approximation the spectral shift s can now be chosen<br />
such that the smallest eigenvalue λ k<br />
searched for gets the eigenvalue λ k ’ of A’ with largest<br />
absolute value and can thus be computed with the von Mises-iteration. However, with this<br />
procedure we have to face the problem that numerical cancellation might occur for finite<br />
computational precision in the final back-transformation λ k = λ k<br />
’- s.<br />
Another problem arises in case that an eigenvalue λ i<br />
matrix A’ will get singular then.<br />
is chosen for s since the transformed
Inverse Iteration<br />
−1<br />
Iteration of :<br />
A<br />
1<br />
= λ ⇒ =<br />
λ<br />
−1<br />
Ax x A x x<br />
In connection with spectral shift, each arbitrary<br />
eigenvalue may be computed:<br />
−<br />
( s ) 1<br />
A'<br />
= A−<br />
I<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
If we take the inverse A -1 instead of A for our iteration the algorithm will converge<br />
against that eigenvalue of A with smallest absolute value because of<br />
Ax = λx ⇒ A -1 x = 1/ λ · x .<br />
But this advantage has to be paid by the much higher numerical effort of the inverse<br />
iteration: Either we have to build A -1 once a priori or we have to solve a linear system<br />
in each step.<br />
Nevertheless this method is often used since in connection with a spectral shift A’ =<br />
(A – S I) -1 each arbitrary eigenvalue of the spectrum may be computed.
Sub-Space-Iteration<br />
Very large, sparse matrix A,<br />
dim( A) = N, λ ≥ 0 real<br />
Look for basis vectors (not necessarily eigenvectors):<br />
( j)<br />
p<br />
∑<br />
i=<br />
1<br />
j<br />
i<br />
i<br />
( 1 )<br />
v = c e j = … p<br />
Eliminate all components of unwanted eigenvectors<br />
by iteration with<br />
( = 1…<br />
)<br />
A−<br />
r k n<br />
I k<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
The sub-space iteration described in the following simultaneously computes several<br />
eigenvectors in each application. The basic idea is to compute several basis vectors<br />
during the iteration which together span a subspace of the complete solution space<br />
where the searched eigensolution lie in this subspace.<br />
Given a very large sparse real matrix A of dimension N x N with eigenvalues λ.<br />
Further we assume that all eigenvalues are real and non-negative<br />
( symmetric positive semi-definite matrix.)<br />
We are searching for the „first“ p eigensolution, i.e. those eigenvectors belonging to<br />
the p smallest eigenvalues ( with p=10; ....100)
Sub-Space Iteration<br />
The computation of the eigensolution is done in two steps:<br />
1. The p so-called basis vectors spanning the sub-space<br />
containing the eigenvectors, searched for, are computed.<br />
2. Using these basis vectors, the given N x N- eigenvalue<br />
problem is transformed into a smaller eigenvalue problem of<br />
dimension p x p. The spectrum of this smaller problem holds<br />
the searched eigenvectors and can be solved by a direct<br />
solution method.<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
The computation of the eigensolution is done in two steps:<br />
1. The p so-called basis vectors spanning the sub-space containing the eigenvectors,<br />
searched for, are computed.<br />
2. Using these basis vectors, the given N x N- eigenvalue problem is transformed into<br />
a smaller eigenvalue problem of dimension p x p. the spectrum of this smaller<br />
problem holds the searched eigenvectors and can be solved by a direct solution<br />
method.
Sub-Space-Iteration<br />
0<br />
( r )<br />
( r )<br />
( 0)<br />
( 0)<br />
( 0)<br />
i=<br />
1<br />
( λ r)<br />
1 1 i i 1 i<br />
i=<br />
1<br />
n N n<br />
( λ r )<br />
n k i i k i<br />
k= 1 i= 1 k=<br />
1<br />
N<br />
v = v = α e<br />
v = A− I v = α − e<br />
∏<br />
v = A− I v = α − e<br />
=<br />
∑<br />
N<br />
∑<br />
∑ ∏<br />
N<br />
∑<br />
i=<br />
1<br />
i<br />
α P<br />
i<br />
( λ )<br />
e<br />
i n i i<br />
( λ) = ( λ−<br />
)<br />
with polynomial of the order n:<br />
P r<br />
n<br />
n<br />
∏<br />
k = 1<br />
k<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
Thus we need to search for a set of basis vector, i.e. linear independent vectors v (j)<br />
which each can be represented as linear combination of all searched eigenvectors e j<br />
(i<br />
=1…p). (The vectors v (j) themselves need not to be eigenvectors of A.)<br />
Then, an arbitrary vector of this sub-space of p basis vectors does not hold any<br />
component of the remaining (not interesting) eigenvectors e i<br />
with i = p+1, …,<br />
N.<br />
Therefore, our goal in the computation of the basis vectors is to eliminate all<br />
components of these undesired eigenvectors starting with some arbitrary initial vector<br />
v (0) .<br />
This can be reached by repeated multiplication of the initial vector v (0) with the<br />
matrix<br />
A - r k<br />
I (k = 1, …, n).<br />
The spectral shift by r k<br />
can vary now in each iteration step.<br />
Analogous to the procedure in the von Mises-iteration we receive the representation<br />
given above with a polynomial P n<br />
of order n, i.e. the number of iterations.
Solution of the <strong>Eigenvalue</strong> <strong>Equation</strong><br />
20<br />
15<br />
10<br />
5<br />
0<br />
−5<br />
Suppressed domain<br />
0 1 2 3 4 5<br />
Tschebyscheff polynomial of degree n=20, shifted and scaled<br />
Ursula van Rienen, Universität Rostock, <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Elektrotechnik, AG Computational Electrodynamics<br />
We can interpret the real values r i<br />
as zeros of the polynomial P n<br />
. We see that the<br />
components of the single eigenvectors e i<br />
contained in the initial vector v (0) are<br />
suppressed or “accelerated” according to the polynomial value P n<br />
(λ i<br />
).<br />
Now, the so-called accelerating polynomial and it´s zeros r k , respectively, may be<br />
chosen such that after sufficiently long iteration the basis vectors only hold<br />
components of the searched eigenvectors.<br />
Appropriate are e.g. the Tschebyscheff polynomials which are well-known from<br />
filtering techniques. Their degree n is fitted to the prescribed accuracy conditions.