Product Reference - Oriental Motor
Product Reference - Oriental Motor
Product Reference - Oriental Motor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Technical <strong>Reference</strong><br />
Stepping <strong>Motor</strong>s<br />
■Structure of Stepping <strong>Motor</strong>s<br />
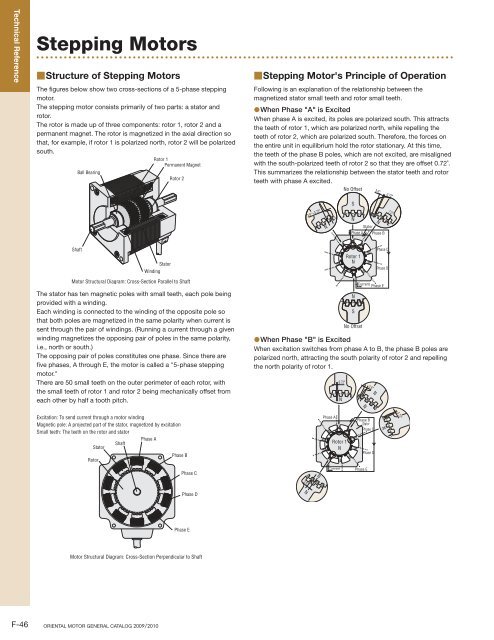
The figures below show two cross-sections of a 5-phase stepping<br />
motor.<br />
The stepping motor consists primarily of two parts: a stator and<br />
rotor.<br />
The rotor is made up of three components: rotor 1, rotor 2 and a<br />
permanent magnet. The rotor is magnetized in the axial direction so<br />
that, for example, if rotor 1 is polarized north, rotor 2 will be polarized<br />
south.<br />
Ball Bearing<br />
Rotor 1<br />
Permanent Magnet<br />
Rotor 2<br />
■Stepping <strong>Motor</strong>'s Principle of Operation<br />
Following is an explanation of the relationship between the<br />
magnetized stator small teeth and rotor small teeth.<br />
●When Phase "A" is Excited<br />
When phase A is excited, its poles are polarized south. This attracts<br />
the teeth of rotor 1, which are polarized north, while repelling the<br />
teeth of rotor 2, which are polarized south. Therefore, the forces on<br />
the entire unit in equilibrium hold the rotor stationary. At this time,<br />
the teeth of the phase B poles, which are not excited, are misaligned<br />
with the south-polarized teeth of rotor 2 so that they are offset 0.72˚.<br />
This summarizes the relationship between the stator teeth and rotor<br />
teeth with phase A excited.<br />
No Offset<br />
3.6°<br />
0.72°<br />
3.6°+0.72°<br />
N<br />
S<br />
N<br />
Stator<br />
N<br />
Phase A Phase B<br />
7.2°<br />
Shaft<br />
Stator<br />
Winding<br />
<strong>Motor</strong> Structural Diagram: Cross-Section Parallel to Shaft<br />
The stator has ten magnetic poles with small teeth, each pole being<br />
provided with a winding.<br />
Each winding is connected to the winding of the opposite pole so<br />
that both poles are magnetized in the same polarity when current is<br />
sent through the pair of windings. (Running a current through a given<br />
winding magnetizes the opposing pair of poles in the same polarity,<br />
i.e., north or south.)<br />
The opposing pair of poles constitutes one phase. Since there are<br />
five phases, A through E, the motor is called a "5-phase stepping<br />
motor."<br />
There are 50 small teeth on the outer perimeter of each rotor, with<br />
the small teeth of rotor 1 and rotor 2 being mechanically offset from<br />
each other by half a tooth pitch.<br />
Rotor 1<br />
N<br />
No Offset<br />
Phase C<br />
Phase D<br />
Current<br />
Phase E<br />
●When Phase "B" is Excited<br />
When excitation switches from phase A to B, the phase B poles are<br />
polarized north, attracting the south polarity of rotor 2 and repelling<br />
the north polarity of rotor 1.<br />
0.72°<br />
N<br />
N<br />
S<br />
S<br />
N<br />
3.6°<br />
S S<br />
N<br />
S<br />
Excitation: To send current through a motor winding<br />
Magnetic pole: A projected part of the stator, magnetized by excitation<br />
Small teeth: The teeth on the rotor and stator<br />
Phase A<br />
Shaft<br />
Stator<br />
Rotor<br />
Phase B<br />
Phase A<br />
Rotor 1<br />
N<br />
Phase B<br />
Stator<br />
Phase C<br />
Phase D<br />
N<br />
0.72°<br />
Phase C<br />
S<br />
S<br />
N<br />
Current<br />
Phase E<br />
3.6°<br />
S S<br />
Phase D<br />
N<br />
Phase E<br />
<strong>Motor</strong> Structural Diagram: Cross-Section Perpendicular to Shaft<br />
F-46 ORIENTAL MOTOR GENERAL CATALOG 2009/2010