Product Reference - Oriental Motor
Product Reference - Oriental Motor
Product Reference - Oriental Motor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3 Obtain the overall equipment rigidity C when a bellows coupling is<br />
used.<br />
1 1 1 1<br />
= + +<br />
C Cm Cb Ct<br />
1 1 1<br />
= + +<br />
90000 116000 334.1<br />
= 0.0030128<br />
C = 331.9 [N·m/rad]<br />
4 Calculation results<br />
Coupling Rigidity<br />
[N·m/rad]<br />
Overall Equipment Rigidity<br />
[N·m/rad]<br />
Jaw Coupling 21000 327.7<br />
Bellows Coupling 116000 331.9<br />
The rigidity of the jaw coupling is one-fifth the rigidity of the bellows<br />
coupling, but the difference in overall equipment rigidity is 1.2%.<br />
■Glossary<br />
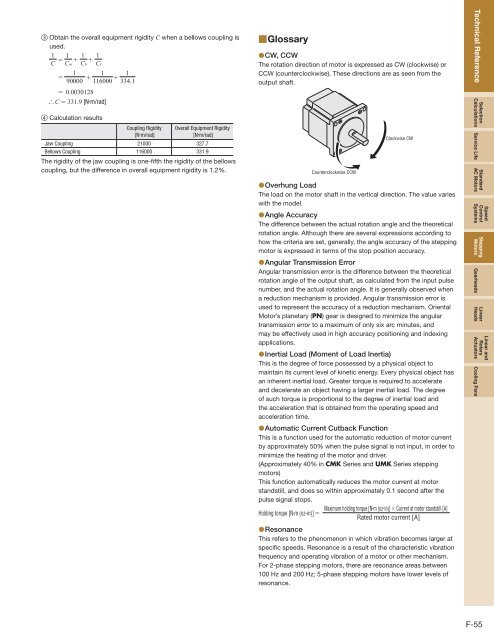
●CW, CCW<br />
The rotation direction of motor is expressed as CW (clockwise) or<br />
CCW (counterclockwise). These directions are as seen from the<br />
output shaft.<br />
Counterclockwise CCW<br />
Clockwise CW<br />
●Overhung Load<br />
The load on the motor shaft in the vertical direction. The value varies<br />
with the model.<br />
●Angle Accuracy<br />
The difference between the actual rotation angle and the theoretical<br />
rotation angle. Although there are several expressions according to<br />
how the criteria are set, generally, the angle accuracy of the stepping<br />
motor is expressed in terms of the stop position accuracy.<br />
●Angular Transmission Error<br />
Angular transmission error is the difference between the theoretical<br />
rotation angle of the output shaft, as calculated from the input pulse<br />
number, and the actual rotation angle. It is generally observed when<br />
a reduction mechanism is provided. Angular transmission error is<br />
used to represent the accuracy of a reduction mechanism. <strong>Oriental</strong><br />
<strong>Motor</strong>’s planetary (PN) gear is designed to minimize the angular<br />
transmission error to a maximum of only six arc minutes, and<br />
may be effectively used in high accuracy positioning and indexing<br />
applications.<br />
●Inertial Load (Moment of Load Inertia)<br />
This is the degree of force possessed by a physical object to<br />
maintain its current level of kinetic energy. Every physical object has<br />
an inherent inertial load. Greater torque is required to accelerate<br />
and decelerate an object having a larger inertial load. The degree<br />
of such torque is proportional to the degree of inertial load and<br />
the acceleration that is obtained from the operating speed and<br />
acceleration time.<br />
●Automatic Current Cutback Function<br />
This is a function used for the automatic reduction of motor current<br />
by approximately 50% when the pulse signal is not input, in order to<br />
minimize the heating of the motor and driver.<br />
(Approximately 40% in CMK Series and UMK Series stepping<br />
motors)<br />
This function automatically reduces the motor current at motor<br />
standstill, and does so within approximately 0.1 second after the<br />
pulse signal stops.<br />
Maximum holding torque [N·m (oz-in)] × Current at motor standstill [A]<br />
Holding torque [N·m (oz-in)] =<br />
Rated motor current [A]<br />
●Resonance<br />
This refers to the phenomenon in which vibration becomes larger at<br />
specific speeds. Resonance is a result of the characteristic vibration<br />
frequency and operating vibration of a motor or other mechanism.<br />
For 2-phase stepping motors, there are resonance areas between<br />
100 Hz and 200 Hz; 5-phase stepping motors have lower levels of<br />
resonance.<br />
Technical <strong>Reference</strong><br />
Selection<br />
Calculations Service Life<br />
Standard<br />
AC <strong>Motor</strong>s<br />
Speed<br />
Control<br />
Systems<br />
Stepping<br />
<strong>Motor</strong>s Gearheads<br />
Linear<br />
Heads<br />
Linear and<br />
Rotary<br />
Actuators Cooling Fans<br />
F-55