Chapter 6. Dynamics I: Motion Along a Line
Chapter 6. Dynamics I: Motion Along a Line
Chapter 6. Dynamics I: Motion Along a Line

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
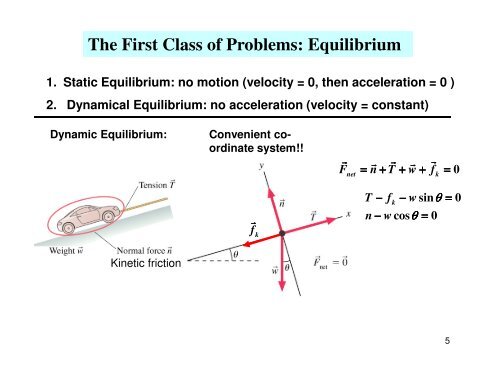
Special The First Class Class of of Problems: Equilibrium<br />
1. Static Equilibrium: no motion (velocity = 0, then acceleration = 0 )<br />
2. Dynamical Equilibrium: no acceleration (velocity = constant)<br />
Dynamic Equilibrium:<br />
Convenient coordinate<br />
system!!<br />
r<br />
r<br />
r<br />
r<br />
r<br />
F = n + T + w + f<br />
=<br />
net<br />
k<br />
0<br />
k<br />
T − f − w sin θ<br />
=<br />
0<br />
f r n − w cosθ<br />
=<br />
0<br />
k<br />
Kinetic friction<br />
5