

Assignment 3.pdf - UBC Mechanical Engineering
Assignment 3.pdf - UBC Mechanical Engineering
Assignment 3.pdf - UBC Mechanical Engineering

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
(b)<br />
(c)<br />
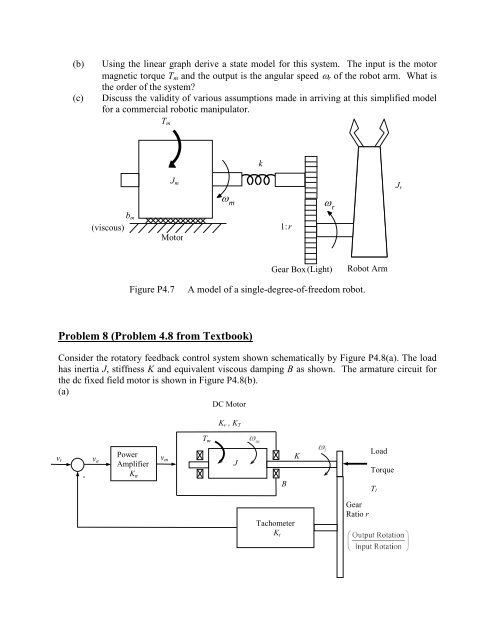
Using the linear graph derive a state model for this system. The input is the motor<br />
magnetic torque T m and the output is the angular speed ω r of the robot arm. What is<br />
the order of the system?<br />
Discuss the validity of various assumptions made in arriving at this simplified model<br />
for a commercial robotic manipulator.<br />
T m<br />
k<br />
J m<br />
ω<br />
m<br />
ω<br />
r<br />
J r<br />
(viscous)<br />
b m<br />
Motor<br />
1: r<br />
Gear Box (Light)<br />
Robot Arm<br />
Figure P4.7<br />
A model of a single-degree-of-freedom robot.<br />
Problem 8 (Problem 4.8 from Textbook)<br />
Consider the rotatory feedback control system shown schematically by Figure P4.8(a). The load<br />
has inertia J, stiffness K and equivalent viscous damping B as shown. The armature circuit for<br />
the dc fixed field motor is shown in Figure P4.8(b).<br />
(a)<br />
DC Motor<br />
K v , K T<br />
T m<br />
v<br />
Power<br />
r v a<br />
v m<br />
Amplifier<br />
-<br />
K a<br />
J<br />
B<br />
K<br />
Load<br />
Torque<br />
T l<br />
Tachometer<br />
K t<br />
Gear<br />
Ratio r













