

Projective Geometry - Institute for Computer Graphics and Vision
Projective Geometry - Institute for Computer Graphics and Vision
Projective Geometry - Institute for Computer Graphics and Vision

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
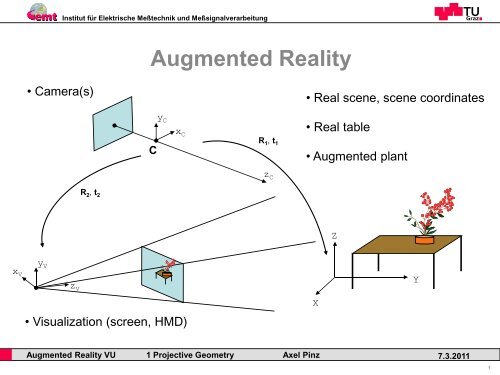
Augmented Reality<br />
• Camera(s)<br />
• Real scene, scene coordinates<br />
C<br />
y C<br />
x C<br />
R 1 , t 1<br />
z C<br />
• Real table<br />
• Augmented plant<br />
R 2 , t 2<br />
Z<br />
x y V<br />
V<br />
z V<br />
• Visualization (screen, HMD)<br />
X<br />
Y<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
1
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Example 1: ARToolkit<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
2
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Example 2: Structure + Motion [Schweighofer]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
3
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Pinhole Camera<br />
“principal”<br />
point (u 0 ,v 0 )<br />
v<br />
u<br />
p(u,v)<br />
image plane π i (u,v): z = -f<br />
f<br />
y<br />
C<br />
x<br />
z<br />
P(x,y,z)<br />
“optical axis”<br />
P’(x’,y’,z’)<br />
“focal length” f<br />
• “real” camera<br />
• “Pinhole” C … “center of projection”<br />
• 2D projection 3D scene<br />
• p(u,v) ↔ line of sight = viewing direction<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
4
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> <strong>Geometry</strong><br />
P’’<br />
!!!<br />
y x<br />
z<br />
C<br />
π 0 ... z = 0<br />
p(u,v)<br />
y x<br />
(u 0 ,v 0 )<br />
v<br />
u<br />
π i ... z = f<br />
P(x,y,z)<br />
P’<br />
“projective” camera, “normalized” camera: f = 1<br />
1 stationary camera 1 coordinate system (x,y,z)<br />
camera-centered coordinate system ≡ scene coordinate system<br />
Only points in π 0 are not projected to π i<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
5
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> Images: Examples, Properties<br />
• Impression of depth in images<br />
• Parallel lines meet at infinity<br />
• “infinity” is projected to finite<br />
location in the image<br />
• “horizon”<br />
• “points at infinity”, …<br />
[Triggs <strong>and</strong> Mohr]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
6
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> Images: Scaling<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
7
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> Images: Foreshortening<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
8
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> Images: Parallel Lines Meet<br />
[Sonka, Hlavac, Boyle]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
9
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> <strong>Geometry</strong><br />
• points in π 1<br />
• straight lines of sight<br />
• projective reconstruction<br />
• geometry, precise<br />
• known correspondences<br />
vs. <strong>Computer</strong> <strong>Vision</strong><br />
• discrete pixels in π i<br />
• sampling theorem<br />
• lens distortion, aperture,<br />
depth of field<br />
• “oriented” projective rec.<br />
“in front of camera”<br />
• inherently imprecise <br />
estimation, minimization<br />
• “outliers” robustness<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
10
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Example: Stereo Reconstruction<br />
~<br />
P<br />
P<br />
C 1<br />
C 2<br />
• projective geometry<br />
• computer vision<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
11
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Algebraic <strong>Projective</strong> <strong>Geometry</strong> (1)<br />
• A unified geometric + algebraic framework<br />
• Point<br />
x0<br />
<br />
p <br />
x0,<br />
y0<br />
y<br />
0 <br />
T<br />
• Line<br />
y<br />
kx<br />
d<br />
0<br />
ax by<br />
<br />
c<br />
<br />
a<br />
<br />
<br />
b<br />
<br />
c <br />
x<br />
y<br />
1<br />
<br />
<br />
<br />
<br />
<br />
<br />
0<br />
<br />
l <br />
<br />
x<br />
<br />
0<br />
<br />
l<br />
<br />
<br />
<br />
<br />
<br />
<br />
a<br />
b<br />
c<br />
<br />
<br />
<br />
<br />
<br />
<br />
x<br />
<br />
<br />
<br />
<br />
<br />
<br />
x <br />
<br />
y<br />
1 <br />
<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
12
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Algebraic <strong>Projective</strong> <strong>Geometry</strong> (2)<br />
• Duality<br />
point ↔ line<br />
p 2<br />
l 1<br />
2<br />
<br />
p<br />
<br />
l 1<br />
l 2<br />
<br />
l<br />
<br />
p 1<br />
p<br />
l 2<br />
<br />
p 1<br />
• Unified approach: projective n-space P n<br />
point<br />
<br />
x x<br />
, ,<br />
x T<br />
1 n 1<br />
(n+1) - vector<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
13
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Homogeneous Coordinates in P n<br />
a<br />
<br />
l b<br />
~<br />
<br />
c <br />
a<br />
<br />
kb<br />
<br />
c <br />
ax by c 0<br />
( ka)<br />
x ( kb)<br />
y kc<br />
0 k<br />
0<br />
Equivalence class of vectors<br />
3<br />
R<br />
0<br />
<br />
0<br />
<br />
0<br />
Homogeneous coordinates<br />
x <br />
inhomogeneous <br />
y <br />
<strong>for</strong>ms P 2 … “projective plane”<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
<br />
<br />
<br />
<br />
<br />
x<br />
x<br />
x<br />
1<br />
2<br />
3<br />
<br />
<br />
, but only 2 DoF<br />
<br />
<br />
7.3.2011<br />
14
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Equivalence Class of Vectors<br />
Without further knowledge, such situations<br />
cannot be distingushed !<br />
A further example: Equivalence of a toy car, closeup shot, <strong>and</strong><br />
real car, distant shot<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
15
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
• Point<br />
<br />
x<br />
<br />
The <strong>Projective</strong> Plane (1)<br />
<br />
l 1<br />
l 2<br />
• Line<br />
<br />
l<br />
<br />
<br />
x 1<br />
x 2<br />
• “ideal” points<br />
<br />
<br />
<br />
<br />
<br />
• “line at infinity”<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
x<br />
x<br />
1<br />
2<br />
0<br />
<br />
<br />
<br />
<br />
<br />
l <br />
<br />
intersection of<br />
parallel lines !<br />
treated like any point x 3 ≠0<br />
0<br />
<br />
0<br />
<br />
1<br />
„Fernpunkte“<br />
the plane’s “horizon”<br />
7.3.2011<br />
16
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
The <strong>Projective</strong> Plane (2)<br />
• Adding the ideal<br />
points to R 2 leads<br />
to the projective<br />
plane P 2<br />
[Hartley+Zisserman]<br />
• Covers all homogeneous<br />
x1<br />
<br />
<br />
coordinates<br />
<br />
<br />
<br />
x<br />
x<br />
2<br />
3<br />
<br />
<br />
<br />
0<br />
<br />
0<br />
<br />
0<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
17
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
The <strong>Projective</strong> Plane (3)<br />
vanishing point,<br />
„Fluchtpunkt“ =<br />
Bild eines<br />
„Fernpunktes“<br />
π<br />
Image of the “horizon” of π,<br />
“line at infinity” of π<br />
• <strong>Projective</strong> geometry can map infinitely far points / lines to finite ones<br />
• No difference between finite <strong>and</strong> infinite<br />
• e.g. hyperbola is one continuous conic<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
18
• Points<br />
• Planes<br />
•<br />
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
There is also <strong>Projective</strong> Space P 3 …<br />
x1<br />
<br />
<br />
x2<br />
<br />
p x1<br />
x2<br />
x3<br />
x4<br />
x <br />
3<br />
<br />
x<br />
4 <br />
<br />
a<br />
p a <br />
a <br />
<br />
b <br />
<br />
c <br />
<br />
d<br />
<br />
<br />
<br />
a<br />
b<br />
c<br />
d<br />
T<br />
0 point plane<br />
T<br />
• Lines: 4 DoF<br />
<br />
2 points p<br />
T<br />
p <br />
1<br />
L <br />
T<br />
p<br />
2 <br />
<br />
l : p<br />
p<br />
1<br />
• Dual line L*:<br />
1<br />
2<br />
,<br />
<br />
p<br />
LL<br />
duality point ↔ plane duality L ↔ L*<br />
2<br />
* T<br />
02<br />
2<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
19
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> Trans<strong>for</strong>mations in P n<br />
• “projective trans<strong>for</strong>mation” = “collineation” =<br />
“projectivity” = “homography” H<br />
• Invertible mapping P n → P<br />
<br />
n<br />
<br />
• x1, x2,<br />
x3<br />
lie on a line Hx1<br />
, Hx2<br />
, Hx3<br />
lie on a line<br />
„geradentreue“ Abbildung<br />
• (n+1) x (n+1) matrix<br />
• In P 2 : x1<br />
' h11<br />
h12<br />
h13<br />
x1<br />
<br />
<br />
x'<br />
<br />
<br />
<br />
<br />
<br />
x<br />
x<br />
2<br />
3<br />
<br />
' Hx<br />
<br />
' <br />
<br />
<br />
<br />
x<br />
<br />
<br />
x<br />
• H has (n+1) 2 -1 DoF, H is non-singular<br />
<br />
<br />
<br />
<br />
h<br />
h<br />
21<br />
31<br />
h<br />
h<br />
22<br />
32<br />
h<br />
h<br />
23<br />
33<br />
2<br />
3<br />
<br />
<br />
<br />
<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
20
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
<strong>Projective</strong> Trans<strong>for</strong>mations in P 2<br />
• Translation<br />
• Rotation<br />
• Scaling<br />
• Any combination, e.g.<br />
1<br />
0 tx<br />
<br />
<br />
T 0<br />
1 tx<br />
x'<br />
Tx<br />
<br />
0<br />
0 1 <br />
cos<br />
sin<br />
0<br />
<br />
<br />
R sin<br />
cos<br />
0<br />
x'<br />
Rx<br />
<br />
<br />
0 0 1<br />
sx<br />
0 0<br />
<br />
S 0 sy<br />
0<br />
x'<br />
Sx<br />
<br />
0 0 1<br />
<br />
M SRT x'<br />
SRTx<br />
<br />
<br />
Mx<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
21
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
A Remark on Conics<br />
• 2 nd degree equation in the plane<br />
ax<br />
• Homog. coord:<br />
ax<br />
• Conic C:<br />
2<br />
2<br />
1<br />
bxy<br />
bx<br />
<br />
x on C<br />
1<br />
x<br />
cy<br />
2<br />
<br />
• Five DoF, 5 points define a conic<br />
2<br />
cx<br />
<br />
x<br />
T<br />
dx ey<br />
2<br />
2<br />
<br />
Cx<br />
x<br />
<br />
<br />
<br />
dx<br />
0 ,<br />
x<br />
1<br />
1<br />
x<br />
3<br />
/<br />
<br />
x<br />
3<br />
f<br />
ex<br />
2<br />
<br />
x<br />
y<br />
3<br />
0<br />
<br />
<br />
a<br />
<br />
C b / 2<br />
<br />
d<br />
/ 2<br />
x<br />
fx<br />
2<br />
2<br />
3<br />
/<br />
c<br />
<br />
x<br />
b / 2<br />
e / 2<br />
3<br />
0<br />
d<br />
/<br />
e /<br />
f<br />
2<br />
<br />
2 <br />
<br />
<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
22
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Back to Homographies – Examples (1)<br />
Mapping between planes<br />
[Hartley+Zisserman]<br />
central projection may be expressed by x’=Hx<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
23
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Back to Homographies – Examples (2)<br />
Removing projective distortion<br />
[Hartley+Zisserman]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
24
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Back to Homographies – Examples (3)<br />
[Hartley+Zisserman]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
25
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Trans<strong>for</strong>mation <strong>for</strong> Points, Lines, Conics<br />
• Point<br />
<br />
x' Hx<br />
• Line<br />
l<br />
' <br />
1<br />
H<br />
<br />
T l<br />
,<br />
H<br />
T<br />
<br />
<br />
1<br />
<br />
T<br />
<br />
<br />
H H<br />
T 1<br />
• Conic<br />
C'<br />
<br />
H<br />
T<br />
CH<br />
<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
26
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
A Hierarchy of Trans<strong>for</strong>mations / Geometries (1)<br />
• Isometric / Euclidean<br />
H<br />
E<br />
– Invariants: length, angle, area<br />
• Similarity<br />
H<br />
S<br />
R<br />
<br />
<br />
T<br />
0<br />
<br />
t <br />
,<br />
1<br />
<br />
3 DoF: ,<br />
t<br />
<br />
sR<br />
t <br />
<br />
, 4 DoF:<br />
T<br />
0 1<br />
<br />
– Invariants: ratios of length / areas, angle, parallel lines<br />
x<br />
t<br />
y<br />
s, ,<br />
t<br />
x<br />
t<br />
y<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
27
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
A Hierarchy of Trans<strong>for</strong>mations / Geometries (2)<br />
• Affine:<br />
– A <br />
H<br />
A<br />
a<br />
<br />
a<br />
<br />
0<br />
11<br />
21<br />
a<br />
a<br />
12<br />
22<br />
0<br />
R(<br />
)<br />
R(<br />
)<br />
DR(<br />
),<br />
tx<br />
<br />
A<br />
t <br />
<br />
y T<br />
0<br />
1 <br />
<br />
<br />
<br />
D <br />
<br />
1<br />
0<br />
<br />
t <br />
<br />
1<br />
<br />
0 <br />
<br />
<br />
2 <br />
– 6 DoF: 2 x scale λ 1 ,λ 2 ; 2 x rot. θ,Ф; 2 x translation<br />
– Invariants: parallel lines, ratios of parallel lengths,<br />
ratios of areas<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
28
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
A Hierarchy of Trans<strong>for</strong>mations / Geometries (3)<br />
• <strong>Projective</strong>:<br />
H<br />
h<br />
<br />
h<br />
<br />
h<br />
11<br />
P 21 22 23 T<br />
31<br />
h<br />
h<br />
h<br />
12<br />
32<br />
h<br />
h<br />
h<br />
13<br />
33<br />
<br />
A<br />
<br />
v<br />
<br />
<br />
t <br />
<br />
v<br />
<br />
– 8 DoF: 2 x scale λ 1 ,λ 2 ; 2 x rot. θ,Ф; 2 x translation;<br />
2 x line at infinity<br />
– Invariant: Cross-ratio CR of 4 collinear points<br />
CR<br />
<br />
AB.<br />
CD<br />
AD.<br />
BC<br />
A B C D<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
29
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
A Hierarchy of Trans<strong>for</strong>mations / Geometries (4)<br />
In 2D, a square<br />
trans<strong>for</strong>ms to:<br />
<strong>Projective</strong><br />
8dof<br />
Affine<br />
6dof<br />
Similarity<br />
4dof<br />
Euclidean<br />
3dof<br />
h<br />
<br />
<br />
h<br />
<br />
h<br />
11<br />
21<br />
31<br />
a<br />
<br />
<br />
a<br />
<br />
0<br />
11<br />
21<br />
sr<br />
<br />
<br />
sr<br />
<br />
0<br />
r<br />
<br />
<br />
r<br />
<br />
0<br />
11<br />
21<br />
11<br />
21<br />
h<br />
h<br />
h<br />
a<br />
a<br />
r<br />
r<br />
12<br />
22<br />
32<br />
12<br />
22<br />
0<br />
sr<br />
sr<br />
12<br />
22<br />
0<br />
12<br />
0<br />
22<br />
h<br />
h<br />
h<br />
13<br />
23<br />
33<br />
tx<br />
<br />
t<br />
<br />
y<br />
<br />
1 <br />
tx<br />
<br />
t<br />
<br />
y<br />
<br />
1 <br />
<br />
<br />
<br />
<br />
tx<br />
<br />
t<br />
<br />
y<br />
<br />
1 <br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
30
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
A Hierarchy of Trans<strong>for</strong>mations / Geometries (5)<br />
<strong>Projective</strong><br />
15dof<br />
A<br />
T<br />
v<br />
t<br />
v<br />
<br />
In 3D, a cube<br />
trans<strong>for</strong>ms to:<br />
Affine<br />
12dof<br />
A<br />
T<br />
0<br />
t<br />
1<br />
<br />
Similarity<br />
7dof<br />
s<br />
R<br />
T<br />
0<br />
t<br />
1<br />
<br />
Euclidean<br />
6dof<br />
R<br />
T<br />
0<br />
t<br />
1<br />
<br />
<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
31
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Stratification<br />
In AR, we take perspective images,<br />
but we require metric (Euclidean) reconstruction!<br />
How?<br />
The stratification of 3D geometry [Pollefeys 2.2]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
32
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Stratification of 2D / 3D <strong>Geometry</strong><br />
Many possibilities, many approaches<br />
Examples:<br />
• Known scenes:<br />
– Known . directions<br />
– Known points, lines, planes at ∞<br />
– Known lengths in the scene<br />
• Unknown scenes:<br />
– Image of the Absolute Conic “IAC” (“self-calibration”)<br />
– Known camera intrinsics<br />
Camera calibration + relative orientation<br />
Multiview geometry, structure+motion<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
33
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Stratification Examples (1)<br />
• Known points, line at infinity<br />
v 1 v 2<br />
l ∞<br />
l 1<br />
l 3<br />
l 2 l 4<br />
v<br />
v<br />
l<br />
l<br />
<br />
2 3<br />
l4<br />
<br />
1 1<br />
l2<br />
l<br />
<br />
<br />
v 1<br />
v 2<br />
perspective<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
affine<br />
7.3.2011<br />
34
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Stratification Examples (1)<br />
• Known ·<br />
directions<br />
affine<br />
metric<br />
(similarity, unknown scale)<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
35
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Stratification Examples (2)<br />
• Known plane at infinity<br />
perspective<br />
affine<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
36
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Stratification Examples (2)<br />
• Known ·<br />
directions<br />
affine<br />
metric<br />
(similarity, unknown scale)<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
37
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Stratification Examples (3)<br />
• Known lengths<br />
[Pollefeys IJCV’99]<br />
metric<br />
(similarity,<br />
unknown scale)<br />
metric<br />
(Euclidean,<br />
known scale)<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
38
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
• ARToolkit<br />
Stratification Examples (4)<br />
perspective<br />
metric<br />
(Euclidean,<br />
known scale)<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
39
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
“Video AR” is (rather) simple<br />
• Known artificial targets / markers<br />
• Uncalibrated perspective camera<br />
– But: collineation required<br />
– Problems when e.g. strong lens distortions<br />
• Augmentation of the video frames<br />
• Examples<br />
– Artoolkit<br />
– Kutulakos<br />
• Can be related to scene coordinates, but<br />
requires “ground truth” <strong>for</strong> markers<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
40
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
ARToolkit Demo ISAR 2000<br />
observer’s view<br />
immersive view<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
41
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Kutulakos’ “Calibration-Free AR”<br />
[IEEE Trans. Visualization <strong>and</strong> <strong>Graphics</strong> 1998]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
42
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Field Maintenance Support [ARVIKA]<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
43
Institut für Elektrische Meßtechnik und Meßsignalverarbeitung<br />
Scene Structure + Camera Motion<br />
(the harder, but more general approach to AR)<br />
• Many possible approaches<br />
• Monocular, calibrated, known “natural”<br />
l<strong>and</strong>marks [Ribo]<br />
• Stereo, calibrated [Schweighofer]<br />
• Monocular, calibrated [Klein+Murray]<br />
• Monocular, uncalibrated [Pollefeys]<br />
– not (yet?) in real time !<br />
Kinect ! calibration !<br />
unknown<br />
scene,<br />
unknown<br />
“natural”<br />
l<strong>and</strong>marks<br />
Professor Augmented Horst Reality Cerjak, VU 19.12.20051 <strong>Projective</strong> <strong>Geometry</strong> Axel Pinz<br />
7.3.2011<br />
44












