Frequency domain design of observers for linear systems using a ...
Frequency domain design of observers for linear systems using a ...
Frequency domain design of observers for linear systems using a ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1<br />
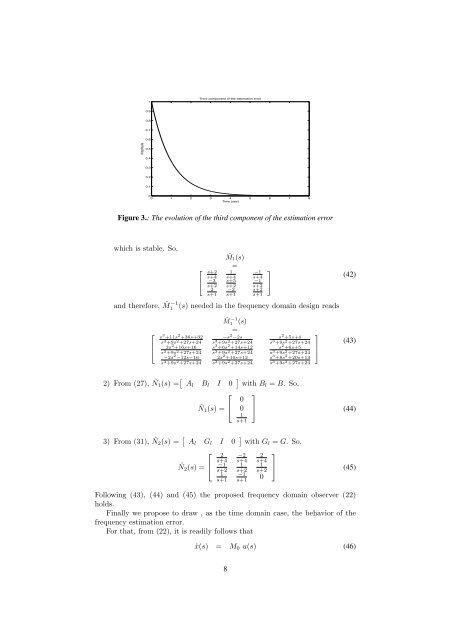
Third component <strong>of</strong> the estimation error<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
Amplitude<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
0 1 2 3 4 5 6 7 8<br />
Time (sec)<br />
Figure 3.: The evolution <strong>of</strong> the third component <strong>of</strong> the estimation error<br />
which is stable. So,<br />
⎡<br />
⎣<br />
s+2<br />
s+4<br />
−3<br />
s+2<br />
2<br />
s+1<br />
ˆM 1(s)<br />
=<br />
1<br />
s+4<br />
s+5<br />
s+2<br />
−2<br />
s+1<br />
−1<br />
s+4<br />
−1<br />
s+2<br />
s+2<br />
s+1<br />
−1<br />
and there<strong>for</strong>e, ˆM 1 (s) needed in the frequency <strong>domain</strong> <strong>design</strong> reads<br />
⎡<br />
⎢<br />
⎣<br />
s 3 +11s 2 +36s+32<br />
s 3 +9s 2 +27s+24<br />
3s 2 +16s+16<br />
s 3 +9s 2 +27s+24<br />
−2s 2 −12s−16<br />
s 3 +9s 2 +27s+24<br />
ˆM −1<br />
1 (s)<br />
=<br />
−s 2 −2s<br />
s 3 +9s 2 +27s+24<br />
s 3 +6s 2 +14s+12<br />
s 3 +9s 2 +27s+24<br />
2s 2 +10s+12<br />
s 3 +9s 2 +27s+24<br />
⎤<br />
⎦<br />
s 2 +5s+4<br />
s 3 +9s 2 +27s+24<br />
s 2 +6s+5<br />
s 3 +9s 2 +27s+24<br />
s 3 +8s 2 +20s+13<br />
s 3 +9s 2 +27s+24<br />
⎤<br />
⎥<br />
⎦<br />
(42)<br />
(43)<br />
2) From (27), ˆN1 (s) = A l B l I 0 with B l = B. So,<br />
⎡ ⎤<br />
0<br />
ˆN 1 (s) = ⎣ 0 ⎦ (44)<br />
1<br />
s+1<br />
3) From (31), ˆN2 (s) = A l G l I 0 with G l = G. So,<br />
⎡<br />
⎤<br />
ˆN 2 (s) = ⎣<br />
2<br />
s+4<br />
−1<br />
s+2<br />
1<br />
s+1<br />
−2 2<br />
s+4 s+4<br />
1 1<br />
s+2 s+2<br />
−1<br />
s+1<br />
0<br />
⎦ (45)<br />
Following (43), (44) and (45) the proposed frequency <strong>domain</strong> observer (22)<br />
holds.<br />
Finally we propose to draw , as the time <strong>domain</strong> case, the behavior <strong>of</strong> the<br />
frequency estimation error.<br />
For that, from (22), it is readily follows that<br />
ˆx(s) = M 0 u(s) (46)<br />
8