Frequency domain design of observers for linear systems using a ...
Frequency domain design of observers for linear systems using a ...
Frequency domain design of observers for linear systems using a ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Frequency</strong> <strong>domain</strong> <strong>design</strong> <strong>of</strong> <strong>observers</strong> <strong>for</strong><br />
<strong>linear</strong> <strong>systems</strong> <strong>using</strong> a factorization approach<br />
Montassar Ezzine ∗,∗∗ , Harouna Souley Ali ∗∗ , Mohamed Darouach ∗∗<br />
et Hassani Messaoud ∗<br />
∗∗ Centre de Recherche en Automatique de Nancy (CRAN - UMR 7039)<br />
Nancy-Université - CNRS<br />
IUT de Longwy, 186 rue de Lorraine<br />
54400 Cosnes et Romain, FRANCE<br />
∗ Ecole Nationale d’Ingénieurs de Monastir, Avenue Ibn El Jazzar, 5019 Monastir,<br />
Tunisie<br />
montassarezzine@yahoo.fr; souley@iut-longwy.uhp-nancy.fr; darouach@iut-longwy.uhpnancy.fr;<br />
hassani.messaoud@enim.rnu.tn<br />
Section de rattachement : 61<br />
Secteur : Secondaire<br />
RÉSUMÉ : This paper proposes an easier frequency <strong>domain</strong> <strong>design</strong> <strong>of</strong> <strong>observers</strong> <strong>for</strong> <strong>linear</strong><br />
<strong>systems</strong>, where all measurements are not corrupted by disturbances, with the aid <strong>of</strong> a factorization<br />
approach . The <strong>design</strong> procedure in the frequency <strong>domain</strong> is first obtained from the<br />
time <strong>domain</strong> solution where we use the full order observer <strong>of</strong> type Luenberger , and then by<br />
the use <strong>of</strong> the factorization approach where we propose to define some useful coprime factorization,<br />
the representation in the frequency <strong>domain</strong> is derived. The frequency <strong>design</strong>ed filter<br />
is easy to calculate as it requires only computation <strong>of</strong> a suitably coprime factorization.<br />
MOTS CLÉS : Time <strong>domain</strong>, frequency <strong>domain</strong>, <strong>linear</strong> system, observer-based controller,<br />
Linear Matrix inequalities (LMIs), Matrix fractions descriptions (MFDs).<br />
1. Introduction<br />
A common feature <strong>of</strong> control schemes is the assumption that the system<br />
state vector is available <strong>for</strong> feedback control purposes. The fact that <strong>systems</strong><br />
rarely satisfy this assumption necessites the reconstruction <strong>of</strong> the missing state<br />
variables. So the state observation problem centres on the construction <strong>of</strong> an<br />
auxiliary dynamic system, known as a state reconstructor or observer, driven<br />
by the available system inputs and outputs. There is many results in time<br />
<strong>domain</strong> [2], [3], [4], [9], [10] ... Un<strong>for</strong>tunately there is less literature in frequency<br />
<strong>domain</strong> although is the basis <strong>for</strong> most analysis per<strong>for</strong>med on control <strong>systems</strong><br />
and it is well known that both <strong>linear</strong> optimal state feedback and optimal <strong>linear</strong><br />
filtering problems can be <strong>for</strong>mulated and solved in the frequency <strong>domain</strong>. A first<br />
solution <strong>for</strong> the filter transfer matrix was presented by MacFarlane (1971)[7],<br />
and it was demonstrated in [8] that optimal state feedback low and the optimal<br />
filter can be characterized by polynomial matrix that directly parameterize the<br />
1
state feedback control and the observer in the frequency <strong>domain</strong>.<br />
In this paper we intend to give a frequency <strong>domain</strong> description <strong>of</strong> full order<br />
<strong>observers</strong> <strong>for</strong> <strong>linear</strong> <strong>systems</strong> where all measurements not corrupted by disturbances,<br />
i.e noise - free output measurements, <strong>using</strong> the factorization approach<br />
[1]. The procedure <strong>of</strong> <strong>design</strong>ing such <strong>observers</strong> is obtained by <strong>using</strong> the famous<br />
full order observer <strong>of</strong> type Luenberger <strong>design</strong>ed in time <strong>domain</strong> [2] , then by<br />
applying the factorization approach, where we propose some useful coprime factorization,<br />
the desired representation in the frequency <strong>domain</strong> is derived. The<br />
main reason <strong>of</strong> <strong>for</strong>mulating the results <strong>of</strong> the time <strong>domain</strong> in the frequency one,<br />
is the advantages that it presents <strong>for</strong> the observer-based control [13]. In fact,<br />
in this case, the compensator is driven by the input and the output <strong>of</strong> the system.<br />
So only the input-output behaviour <strong>of</strong> the compensator (characterized by<br />
its transfer function) influences the properties <strong>of</strong> the closed-loop system. The<br />
additional degrees <strong>of</strong> freedom given by the frequency approach can then be used<br />
<strong>for</strong> robustness purpose <strong>for</strong> example [13].<br />
The present work is organized as follows. The next section present the<br />
problem that we propose to solve . Section 3 gives the time <strong>domain</strong> solution<br />
<strong>for</strong> this full order problem that will be useful <strong>for</strong> our frequency <strong>domain</strong> <strong>design</strong>,<br />
deduced from [2]. Section 4 deals with tw<strong>of</strong>old . First we review some important<br />
results <strong>of</strong> the factorization approach , and in a second time, we give the main<br />
result <strong>of</strong> the paper by proposing a frequency <strong>domain</strong> description <strong>of</strong> full order<br />
observer <strong>for</strong> <strong>linear</strong> <strong>systems</strong> . In Section 5 we present an illustrative example and<br />
Section 6 concludes the paper.<br />
2. Problem Statement<br />
Consider the <strong>linear</strong> time-invariant multivariable system described by<br />
ẋ(t) = Ax(t)+Bu(t) (1a)<br />
y(t) = Cx(t) (1b)<br />
Where x(t) ∈ n and y(t) ∈ m m ≤ n, are the state vector, the output<br />
vector <strong>of</strong> the system, and u(t) ∈ q represents the input vector. The system<br />
matrices A, B and C assumed to be known.<br />
Problem :<br />
Our aim is to <strong>design</strong> a full order observer, <strong>for</strong> system (1) in the frequency<br />
<strong>domain</strong> <strong>using</strong> the factorization approach [1]. This frequency <strong>domain</strong> observer<br />
will generates the estimate ˆx(s) <strong>for</strong> the Laplace Trans<strong>for</strong>m <strong>of</strong> the state vector<br />
x(t) ,x(s) <strong>using</strong> the measurements y(s) and the inputs u(s).<br />
3. Full Order observer in the time <strong>domain</strong><br />
Be<strong>for</strong>e giving the time <strong>domain</strong> <strong>design</strong> <strong>of</strong> the estimator , it is <strong>of</strong> interest to<br />
recall the following definition:<br />
Définition 1. [2]<br />
2
The state reconstruction problem is one <strong>of</strong> determining the state x(τ) <strong>of</strong> the system (1)<br />
at time τ from a knowledge <strong>of</strong> the output measurements y(σ), σ ≤ τ.<br />
So, by follows that <strong>of</strong> [2], a full- order observer <strong>for</strong> the system (1)<br />
described by<br />
can be<br />
˙ˆx(t) = Aˆx(t)+Bu(t)+G(y(t) − ŷ(t)) (2)<br />
where ˆx(t) ∈ n denotes the estimated state and G is the correction gain <strong>of</strong><br />
the observer.<br />
Let’s define the estimation error a<br />
Then, the dynamics <strong>of</strong> this estimation error is<br />
e(t) = x(t) − ˆx(t) (3)<br />
ė(t) = ẋ(t) − ˙ˆx(t) (4)<br />
= (A − GC)e(t) (5)<br />
There<strong>for</strong>e, the estimation error can be asymptotically reduced to zero, if and<br />
only if the pair (A, C) is completely observable. In this case, one can choose<br />
the gain G to assign the eigenvalues <strong>of</strong> the matrix (A- G C) to the left- hand<br />
side <strong>of</strong> the complex plane.<br />
In the sequel we shall give a frequency <strong>domain</strong> representation <strong>of</strong> the full<br />
order observer (2) .<br />
4. Full order observer in the frequency <strong>domain</strong><br />
In this section we propose an easier technique <strong>of</strong> <strong>design</strong>ing <strong>observers</strong> <strong>for</strong><br />
<strong>linear</strong> <strong>systems</strong> in the frequency <strong>domain</strong>. In fact, the procedure <strong>design</strong> is derived<br />
from time <strong>domain</strong> results with the aid <strong>of</strong> the factorization approach [1] after<br />
reviewing some important notations and results.<br />
4.1. Factorization approach: A review<br />
A transfer matrix H(s) is said to be a RH∞ - matrix if H(s) is a real- rational<br />
matrice which is stable and proper. Furthermore, a state- space realization <strong>of</strong><br />
H(s) =C(sI − A) −1 B + D (6)<br />
is denoted by<br />
A B C D<br />
<br />
(7)<br />
A rational function matrix H(s) is a matrix whose elements are rational functions.<br />
A right polynomial matrix fraction (PMF) <strong>for</strong> the p × m rational function<br />
matrix H(s) is an expression <strong>of</strong> the <strong>for</strong>m<br />
H(s) =N(s)M −1 (s) (8)<br />
3
where N(s) is a p × m polynomial matrix, and M(s) is an m × m nonsingular<br />
polynomial matrix. Such a PMF is further called a right coprime PMF if N(s)<br />
and D(s) are right coprime.<br />
A left polynomial matrix fraction <strong>for</strong> H(s) is an expression <strong>of</strong> the <strong>for</strong>m<br />
H(s) = ˆM −1 (s) ˆN(s) (9)<br />
where ˆN(s) isap × m polynomial matrix, and ˆM(s) isap × p nonsingular<br />
polynomial matrix. Such a PMF is further called a left coprime PMF if ˆM(s)<br />
and ˆN(s) are right coprime.<br />
There<strong>for</strong>e, a double coprime factorization <strong>of</strong> H(s) reads<br />
H(s) =N(s)M −1 (s) = ˆM −1 (s) ˆN(s) (10)<br />
For this double coprime factorization there exist four polynomial matrices Y(s),<br />
X(s), Ŷ (s) and ˆX(s) satisfying the Bezout identity [1]:<br />
<br />
Y (s) X(s) M(s) − ˆX(s)<br />
− ˆN(s) ˆM(s) N(s) Ŷ (s)<br />
<br />
M(s) ˆX(s) Y (s) −X(s)<br />
−N(s) Ŷ (s) ˆN(s) ˆM(s)<br />
I 0<br />
0 I<br />
=<br />
=<br />
(11)<br />
Following the algorithm provided in [5] all matrices implemented in the bezout<br />
identity can be realized as follows:<br />
M(s) = A k B K I (12)<br />
N(s) = A k B C + DK D (13)<br />
ˆM(s) = A l −L C I (14)<br />
ˆN(s) = A l B − LD C D (15)<br />
Y (s) = A l B − LD −K I (16)<br />
X(s) = A l L −K 0 (17)<br />
Ŷ (s) = A k L C + DK I (18)<br />
ˆX(s) = A k L −K 0 (19)<br />
where K and L are chosen such that A k = A+BK and A l = A−LC are stable.<br />
4.2. Main results<br />
In this section, based on factorization approach the problem <strong>of</strong> <strong>design</strong>ing full<br />
order <strong>observers</strong> in the frequency <strong>domain</strong> is solved.<br />
Théoreme 1. : A frequency <strong>domain</strong> representation <strong>of</strong> the estimated states obtained<br />
from the full-order observer (2) <strong>of</strong> order n , with the aid <strong>of</strong> following coprime factorizations<br />
4
i)<br />
(sI − Π) −1 B =<br />
ˆM<br />
−1<br />
1 (s) ˆN 1 (s) (20)<br />
ii)<br />
(sI − Π) −1 G =<br />
ˆM<br />
−1<br />
2 (s) ˆN 2 (s) (21)<br />
with Π=A − GC<br />
is given by,<br />
ˆx(s) =<br />
−1 ˆM 1 (s)( ˆN 1 (s) u(s)+ ˆN 2 (s) y(s)) (22)<br />
Preuve 1. By taking the Laplace trans<strong>for</strong>m <strong>of</strong> (2) we have<br />
which implies that<br />
sˆx(s) =Πx(s)+Bu(s)+Gy(s) (23)<br />
ˆx(s) =(sI − Π) −1 Bu(s)+(sI − Π) −1 Gy(s) (24)<br />
Now, from proposed factorizations, we have:<br />
a)<br />
(sI − Π) −1 B =<br />
ˆM<br />
−1<br />
1 (s) ˆN 1 (s) (25)<br />
with<br />
ˆM 1 (s) = A l −L I I (26)<br />
ˆN 1 (s) = A l B l I 0 (27)<br />
where A l =Π− LC and B l = B − L.0 =B, L is chosen such that A l is<br />
stable.<br />
b)<br />
(sI − Π) −1 G =<br />
ˆM<br />
−1<br />
2 (s) ˆN 2 (s) (28)<br />
with<br />
where G l = G − L0 =G .<br />
ˆM 2 (s) = A l −L I I (29)<br />
= ˆM 1 (s) (30)<br />
ˆN 2 (s) = A l G l I 0 (31)<br />
Substituting equation (25), (28) with (30) in (24), the theorem is immediately proved.<br />
5
5. Numerical Example<br />
Consider the <strong>linear</strong> system<br />
⎡<br />
ẋ(t) =<br />
y(t) =<br />
⎣ −3 1 0<br />
0 −2 0<br />
0 0 −1<br />
⎡<br />
⎣ 1 0 0<br />
1 1 0<br />
0 1 0<br />
⎤<br />
⎤<br />
⎦ x(t)+<br />
⎡<br />
⎣ 0 0<br />
1<br />
⎤<br />
⎦ u(t)<br />
⎦ x(t) (32)<br />
1 - Time <strong>domain</strong> <strong>design</strong><br />
The full order observer (24) is determined by specifying the observer gain<br />
⎡<br />
G = ⎣ g ⎤<br />
1 g 4 g 7<br />
g 2 g 5 g 8<br />
⎦ (33)<br />
g 3 g 6 g 9<br />
The resulting observer system matrix is<br />
⎡<br />
−3 − g 1 − g 4 −g 4 − g 7 0<br />
⎤<br />
A − GC = ⎣ −g 2 − g 5 −2 − g 5 − g 8 0 ⎦ (34)<br />
−g 3 − g 6 −g 6 − g 9 −1<br />
which has corresponding characteristic equation<br />
We decide to do a pole placement. In fact we want to make the observer<br />
have as eigenvalues -3 and -4 in addition <strong>of</strong> -1 which is a fixed pole. This would<br />
give the characteristic equation<br />
P 1 (λ) =λ 3 +8λ 2 + 19λ + 12 (35)<br />
So, with a simple identification, we deduce that<br />
⎡<br />
−2 2 ⎤<br />
G = ⎣ −1 1 1 ⎦ (36)<br />
1 −1 0<br />
The observer is thus governed by<br />
˙ˆx(t) =<br />
+<br />
⎡<br />
⎣ −3 0 0<br />
0 −4 0<br />
0 1 −1<br />
⎡<br />
⎣ −1 1 1<br />
2 −2 2<br />
1 −1 0<br />
⎤<br />
⎤<br />
⎦ ˆx(t)+<br />
⎡<br />
⎣ 0 0<br />
1<br />
⎤<br />
⎦ u(t)<br />
⎦ y(t) (37)<br />
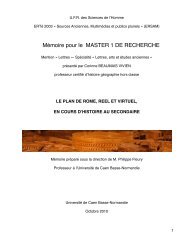
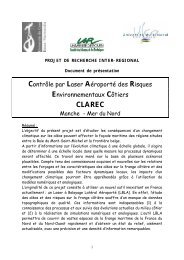
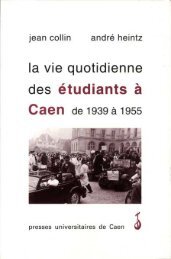
In the following we draw the evolution <strong>of</strong> the third components <strong>of</strong> the estimation<br />
error: we take as initial conditions<br />
x(0) = 1 2 1 (38)<br />
ˆx(0) = 0 0 0 (39)<br />
6
1<br />
First component <strong>of</strong> the estimation error<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
Amplitude<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
0 1 2 3 4 5 6 7 8<br />
Time (sec)<br />
Figure 1.: The evolution <strong>of</strong> the first component <strong>of</strong> the estimation error<br />
2<br />
Second component <strong>of</strong> the estimation error<br />
1.8<br />
1.6<br />
1.4<br />
1.2<br />
Amplitude<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
0 1 2 3 4 5 6 7 8<br />
Time (sec)<br />
Figure 2.: The evolution <strong>of</strong> the second component <strong>of</strong> the estimation error<br />
2 - <strong>Frequency</strong> <strong>domain</strong> <strong>design</strong><br />
We intend there<strong>for</strong>e in this section to find the polynomial matrices ˆM 1 (s), ˆN1 (s)<br />
and ˆN 2 (s) with the aid <strong>of</strong> the factorization approach.<br />
1) From (26), we have ˆM 1 (s) = A l −L I I with A l =Π− LC.<br />
we choose<br />
⎡<br />
L = ⎣<br />
2 −1 1<br />
3 −3 1<br />
−2 2 −1<br />
⎤<br />
⎦ (40)<br />
so that<br />
A l =<br />
⎡<br />
⎣ −4 0 0<br />
0 −2 0<br />
0 0 −1<br />
⎤<br />
⎦ (41)<br />
7
1<br />
Third component <strong>of</strong> the estimation error<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
Amplitude<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
0 1 2 3 4 5 6 7 8<br />
Time (sec)<br />
Figure 3.: The evolution <strong>of</strong> the third component <strong>of</strong> the estimation error<br />
which is stable. So,<br />
⎡<br />
⎣<br />
s+2<br />
s+4<br />
−3<br />
s+2<br />
2<br />
s+1<br />
ˆM 1(s)<br />
=<br />
1<br />
s+4<br />
s+5<br />
s+2<br />
−2<br />
s+1<br />
−1<br />
s+4<br />
−1<br />
s+2<br />
s+2<br />
s+1<br />
−1<br />
and there<strong>for</strong>e, ˆM 1 (s) needed in the frequency <strong>domain</strong> <strong>design</strong> reads<br />
⎡<br />
⎢<br />
⎣<br />
s 3 +11s 2 +36s+32<br />
s 3 +9s 2 +27s+24<br />
3s 2 +16s+16<br />
s 3 +9s 2 +27s+24<br />
−2s 2 −12s−16<br />
s 3 +9s 2 +27s+24<br />
ˆM −1<br />
1 (s)<br />
=<br />
−s 2 −2s<br />
s 3 +9s 2 +27s+24<br />
s 3 +6s 2 +14s+12<br />
s 3 +9s 2 +27s+24<br />
2s 2 +10s+12<br />
s 3 +9s 2 +27s+24<br />
⎤<br />
⎦<br />
s 2 +5s+4<br />
s 3 +9s 2 +27s+24<br />
s 2 +6s+5<br />
s 3 +9s 2 +27s+24<br />
s 3 +8s 2 +20s+13<br />
s 3 +9s 2 +27s+24<br />
⎤<br />
⎥<br />
⎦<br />
(42)<br />
(43)<br />
2) From (27), ˆN1 (s) = A l B l I 0 with B l = B. So,<br />
⎡ ⎤<br />
0<br />
ˆN 1 (s) = ⎣ 0 ⎦ (44)<br />
1<br />
s+1<br />
3) From (31), ˆN2 (s) = A l G l I 0 with G l = G. So,<br />
⎡<br />
⎤<br />
ˆN 2 (s) = ⎣<br />
2<br />
s+4<br />
−1<br />
s+2<br />
1<br />
s+1<br />
−2 2<br />
s+4 s+4<br />
1 1<br />
s+2 s+2<br />
−1<br />
s+1<br />
0<br />
⎦ (45)<br />
Following (43), (44) and (45) the proposed frequency <strong>domain</strong> observer (22)<br />
holds.<br />
Finally we propose to draw , as the time <strong>domain</strong> case, the behavior <strong>of</strong> the<br />
frequency estimation error.<br />
For that, from (22), it is readily follows that<br />
ˆx(s) = M 0 u(s) (46)<br />
8
with<br />
⎡<br />
⎢<br />
⎣<br />
M 0<br />
=<br />
s 2 +5s+4<br />
(s 3 +9s 2 +27s+24)(s+1)<br />
s 2 +6s+5<br />
(s 3 +9s 2 +27s+24)(s+1)<br />
s 3 +8s 2 +20s+13<br />
(s 3 +9s 2 +27s+24)(s+1)<br />
⎤<br />
⎥<br />
⎦<br />
(47)<br />
and there<strong>for</strong>e the estimation error <strong>design</strong>ed in the frequency <strong>domain</strong> reads<br />
e(s) = x(s) − ˆx(s) (48)<br />
= ((sI − A) −1 B − M 0 )u(s) (49)<br />
⎡<br />
⎤<br />
=<br />
⎢<br />
⎣<br />
s 2 +5s+4<br />
(s 3 +9s 2 +27s+24)(s+1)<br />
s 2 +6s+5<br />
(s 3 +9s 2 +27s+24)(s+1)<br />
s 3 +8s 2 +20s+13<br />
(s 3 +9s 2 +27s+24)(s+1)<br />
⎥<br />
⎦<br />
u(s) (50)<br />
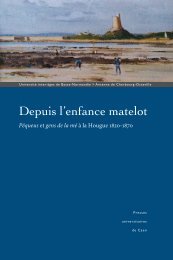
Finally, we draw in figure 4, 5, 6 the evolution <strong>of</strong> the three frequency estimation<br />
error and its impulse response in figure 7, 8 and 9 to show the effectiveness <strong>of</strong><br />
proposed approach.<br />
6. Conclusion<br />
We developed in this paper, <strong>using</strong> the factorization approach, an easier frequency<br />
<strong>domain</strong> <strong>design</strong> <strong>of</strong> full order <strong>observers</strong> where <strong>linear</strong> <strong>systems</strong> with measurements<br />
not corrupted by disturbances, i.e noise - free output measurements is<br />
considered. The <strong>design</strong> procedure is obtained from the full order observer <strong>of</strong> type<br />
Luenberger <strong>design</strong>ed in time <strong>domain</strong> , then applying the factorization approach,<br />
where we propose some useful coprime factorization, the desired representation<br />
in the frequency <strong>domain</strong> is derived. The frequency <strong>design</strong>ed observer is easy<br />
to calculate as it requires only computation <strong>of</strong> a suitably coprime factorization.<br />
The proposed full order observer has been carried on a numerical example and<br />
the results were successful. The further works will concern the <strong>design</strong> <strong>of</strong> <strong>observers</strong><br />
<strong>for</strong> descriptor <strong>systems</strong> in the frequency <strong>domain</strong> and the observer-based<br />
compensator <strong>design</strong> as it is the main motivation <strong>of</strong> the frequency <strong>domain</strong> approach<br />
[13].<br />
References<br />
[1] : Vidyasagar.M, ”Control Systems Synthesis: A Factorization Approach”,M.I.T,Press,<br />
Cambridge, MA,1985.<br />
[2] : O’Reilly.J, ”Observers <strong>for</strong> Linear Systems”, New York, NY: Academic,<br />
1983.<br />
[3] : D. G. Luenberger, ”Observers <strong>for</strong> multivariable <strong>systems</strong>”, IEEE<br />
Trans.Automat. Contr., vol. 11, pp. 190-197, 1966.<br />
[4] : D. G. Luenberger, , ”An introduction to <strong>observers</strong>”, IEEE Trans. Automat.<br />
Contr., vol. 16, pp. 596-602, 1971.<br />
9
[5] : Francis.B.A, ”A Course in H ∞ Control Theory. Springer-Verlag, Berlin-<br />
New York,1987.<br />
[6] : Antsaklis.P and Michel.N, ”Linear Systems ”, New York: McGraw-Hill,<br />
1997.<br />
[7] : MacFarlane,A.G.J, ”Return-difference matrix properties <strong>for</strong> optimal stationary<br />
Kalman-Bucy filter”, Proceedings <strong>of</strong> the Institution <strong>of</strong> Electrical<br />
Engineers, 118, 373-376 1971.<br />
[8] : Anderson.B.D.O and Ku˘cera.V , ”Matrix fraction construction <strong>of</strong> <strong>linear</strong><br />
compensators”, IEEE Transaction on Automatic Control.Processing, 30,<br />
1112-1114 1985.<br />
[9] : Darouach M., Zasadzinski M., Xu S.J.,, ”Full- order <strong>observers</strong> <strong>for</strong> <strong>linear</strong><br />
<strong>systems</strong> with unknown inputs”, IEEE Trans. Automat. Contr., vol AC. 39,<br />
pp. 606-609, 1994.<br />
[10] : Battacharyya S.P.,, ”Observer <strong>design</strong> <strong>for</strong> <strong>linear</strong> <strong>systems</strong> with unknown<br />
inputs”, IEEE Trans. Automat. Contr., vol AC. 23, pp. 483-484, 1978.<br />
[11] : Ding.X, Frank.M.P and Guo.L, ”Robust Observer Design Via Factorization<br />
Approach”, Proceedings <strong>of</strong> the 29th Conlerence on Decioion and<br />
Control Honolulu. Hawall December 1990.<br />
[12] : Ding.X, Guo.L and Frank.M.P , ”Parameterization <strong>of</strong> Linear Observers<br />
and Its Application to Observer Design”, IEEE Transaction on Automatic<br />
Control.Processing, 39, 1648-1652 1994.<br />
[13] : Hippe.P and Deutscher.J, ”Design <strong>of</strong> observer-based compensators : From<br />
the time to the frequency <strong>domain</strong>”, Springer-Verlag, London, 2009.<br />
[14] : Markez. H. J, ”A frequency <strong>domain</strong> approach to state estimation”, Journal<br />
<strong>of</strong> the Franklin Institute 340, 147-157 , 2003.<br />
0<br />
Bode diagram <strong>of</strong> the first component <strong>of</strong> the frequency estimation error e(s)<br />
−10<br />
−20<br />
Magnitude (dB)<br />
−30<br />
−40<br />
−50<br />
−60<br />
−70<br />
−80 180<br />
135<br />
Phase (deg)<br />
90<br />
45<br />
0<br />
10 −2 10 −1 10 0 10 1 10 2<br />
<strong>Frequency</strong> (rad/sec)<br />
Figure 4.: The Bode diagram <strong>of</strong> the first component <strong>of</strong> the frequency estimation error<br />
10
−80<br />
0<br />
Bode diagram <strong>of</strong> the second component <strong>of</strong> the frequency estimation error e(s)<br />
−10<br />
−20<br />
Magnitude (dB)<br />
−30<br />
−40<br />
−50<br />
−60<br />
−70<br />
180<br />
135<br />
Phase (deg)<br />
90<br />
45<br />
0<br />
10 −2 10 −1 10 0 10 1 10 2<br />
<strong>Frequency</strong> (rad/sec)<br />
Figure 5.: The Bode diagram <strong>of</strong> the second component <strong>of</strong> the frequency estimation<br />
error<br />
0<br />
Bode diagram <strong>of</strong> the third component <strong>of</strong> the frequency estimation error e(s)<br />
−10<br />
−20<br />
Magnitude (dB)<br />
−30<br />
−40<br />
−50<br />
−60<br />
−70<br />
−800<br />
−45<br />
Phase (deg)<br />
−90<br />
−135<br />
−180<br />
10 −2 10 −1 10 0 10 1 10 2<br />
<strong>Frequency</strong> (rad/sec)<br />
Figure 6.: The Bode diagram <strong>of</strong> the third component <strong>of</strong> the frequency estimation error<br />
0<br />
Impulse response <strong>of</strong> the first component <strong>of</strong> the frequency estimation error e(s)<br />
−0.02<br />
−0.04<br />
−0.06<br />
Amplitude<br />
−0.08<br />
−0.1<br />
−0.12<br />
−0.14<br />
−0.16<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
Time (sec)<br />
Figure 7.: The impulse response <strong>of</strong> the first component <strong>of</strong> the frequency estimation<br />
error<br />
11
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
0<br />
Impulse response <strong>of</strong> the second component <strong>of</strong> the frequency estimation error e(s)<br />
−0.02<br />
−0.04<br />
−0.06<br />
Amplitude<br />
−0.08<br />
−0.1<br />
−0.12<br />
−0.14<br />
−0.16<br />
−0.18<br />
Time (sec)<br />
Figure 8.: The impulse response <strong>of</strong> the second component <strong>of</strong> the frequency estimation<br />
error<br />
0.25<br />
Impulse response <strong>of</strong> the third component <strong>of</strong> the frequency estimation error e(s)<br />
0.2<br />
0.15<br />
Amplitude<br />
0.1<br />
0.05<br />
0<br />
0 1 2 3 4 5 6<br />
Time (sec)<br />
Figure 9.: The impulse response <strong>of</strong> the third component <strong>of</strong> the frequency estimation<br />
error<br />
12